Vous aimerez peut-être aussi
- SPACE 4000 Ver 9-2007Document214 pagesSPACE 4000 Ver 9-2007Antoine Churin100% (3)
- SPACE 3000 Manuel AtelierDocument294 pagesSPACE 3000 Manuel AtelierAntoine ChurinPas encore d'évaluation
- Manual Operacion Mtto 14023Document322 pagesManual Operacion Mtto 14023anmec20100% (1)
- Grue HIAB 200Document21 pagesGrue HIAB 200tantely.rakotonirinahff.mg Adamidenebadon50% (2)
- Demag AC100 5 Spec EuDocument27 pagesDemag AC100 5 Spec EuHoward Hoac100% (1)
- Diagrama Demag Ac80Document8 pagesDiagrama Demag Ac80caco911Pas encore d'évaluation
- Catalogo Fassi ProgramDocument32 pagesCatalogo Fassi Programmclares770% (1)
- G2B - G3 Service Manual RevCDocument49 pagesG2B - G3 Service Manual RevCYosmell Fritzan Paz Urbizagastegui67% (3)
- AC55Document326 pagesAC55Salim KOM100% (2)
- All Terrain Terex Ac 100-4lDocument40 pagesAll Terrain Terex Ac 100-4lSig Duran100% (1)
- 80-6-M100 MRT 1432-1635 M SeriesDocument36 pages80-6-M100 MRT 1432-1635 M SeriesFrank Bullit100% (1)
- DHB - 99904-06-03 LICCON2Document130 pagesDHB - 99904-06-03 LICCON2Bouras MohamedPas encore d'évaluation
- System CecDocument34 pagesSystem Cecgustavo caicedo50% (2)
- Auto Gru PMDocument23 pagesAuto Gru PMbrunosamaeianPas encore d'évaluation
- Terex Demag AC35Document22 pagesTerex Demag AC35jelcz33% (3)
- GT 30 Rt530e GroveDocument20 pagesGT 30 Rt530e Grovehenry_zambrano100% (1)
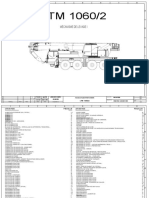
- Chema Electric 1060-2Document138 pagesChema Electric 1060-2hakim blidi100% (2)
- Notice Calibration ManitouDocument3 pagesNotice Calibration ManitouNM100% (2)
- LTM 1090/1 - Porteur UW-01: Table Des MatièresDocument28 pagesLTM 1090/1 - Porteur UW-01: Table Des MatièresncirPas encore d'évaluation
- 817-817C-820-823 Use & Maintenance Manual PDFDocument237 pages817-817C-820-823 Use & Maintenance Manual PDFHidroil Neuquen SrlPas encore d'évaluation
- sm#rc400 v200 Fre PDFDocument68 pagessm#rc400 v200 Fre PDFhocinePas encore d'évaluation
- Entretient AC40+LDocument94 pagesEntretient AC40+Ljosselin quatrainPas encore d'évaluation
- EMS-Modul - ZHB - FR - 02-20.pdf Liebherr Tele PDFDocument54 pagesEMS-Modul - ZHB - FR - 02-20.pdf Liebherr Tele PDFArsène TIA MANPas encore d'évaluation
- Liberrr PDFDocument8 pagesLiberrr PDFMadidj_2014Pas encore d'évaluation
- Om Atf70g-4 2131034 FRDocument898 pagesOm Atf70g-4 2131034 FRMario Bugia100% (2)
- AC 55-3 AC60-3 Training Manual V 1.1Document3 100 pagesAC 55-3 AC60-3 Training Manual V 1.1DraganPas encore d'évaluation
- 045 Technical Data PDFDocument12 pages045 Technical Data PDFSaulius KlimkeviciusPas encore d'évaluation
- AC80-1 Training Manual Ver.1.1Document192 pagesAC80-1 Training Manual Ver.1.1Muhammad Awais100% (4)
- Terex Demag AC160-2Document26 pagesTerex Demag AC160-2Francisco Riquelme100% (1)
- Codes L524Document58 pagesCodes L524ameur bouaouina100% (2)
- GRIL 8600T FRA Maneul Opérat.Document112 pagesGRIL 8600T FRA Maneul Opérat.Hrizi TaherPas encore d'évaluation
- FX500 FX900 FX500 FX900Document180 pagesFX500 FX900 FX500 FX900nicolas favierPas encore d'évaluation
- Terex Demag AC200Document26 pagesTerex Demag AC200Amaury OrtegaPas encore d'évaluation
- Demag Ac 80-1Document21 pagesDemag Ac 80-1Tuntun Tat0% (1)
- Abaque Att 400Document17 pagesAbaque Att 400Jean calvin KuatePas encore d'évaluation
- MR 12MSX 5400701 FRDocument84 pagesMR 12MSX 5400701 FRFarid Rezig75% (4)
- Numero Designation: Page de GardeDocument18 pagesNumero Designation: Page de GardeLEGRIS100% (1)
- Système électrique/LICCON/CEC LTM 1090/2: Liebherr-Werk Ehingen GMBHDocument1 pageSystème électrique/LICCON/CEC LTM 1090/2: Liebherr-Werk Ehingen GMBHSarra ChouchenePas encore d'évaluation
- Grove GMK 4070Document18 pagesGrove GMK 4070enriquevazquez27Pas encore d'évaluation
- Bal - 21000-05-03 LTM 1200-5.1Document1 702 pagesBal - 21000-05-03 LTM 1200-5.1Mamadou djibril Ba100% (2)
- 999 FRDocument194 pages999 FRBoss kevinPas encore d'évaluation
- GHV-09 Grove GMK-6300Document26 pagesGHV-09 Grove GMK-6300Jhonatan Sandrini100% (2)
- 1033 Diagnostik RS FRDocument92 pages1033 Diagnostik RS FRCharaf Dine100% (1)
- Manuel D'exploitationDocument942 pagesManuel D'exploitationgoxmadPas encore d'évaluation
- ABC Del Operador de Grúas Hiab XS600-XS800Document84 pagesABC Del Operador de Grúas Hiab XS600-XS800CLIFFORDPA100% (1)
- Fassi F155a.0 - F155a.2 PDFDocument24 pagesFassi F155a.0 - F155a.2 PDFGuruh SuprayitnoPas encore d'évaluation
- Manuel de ReparationDocument70 pagesManuel de ReparationRSchryers1100% (2)
- Manitou Attachments (FR)Document148 pagesManitou Attachments (FR)Manitou100% (1)
- Liebherr LTM1120 1Document14 pagesLiebherr LTM1120 1rahmankhan823Pas encore d'évaluation
- Manual de Operaciones PDFDocument346 pagesManual de Operaciones PDFCarlos Perez TelloPas encore d'évaluation
- Grove RT 0700EDocument20 pagesGrove RT 0700EfernandoPas encore d'évaluation
- E0902 HA15IDocument211 pagesE0902 HA15ISARAMQR100% (2)
- Manuel de Maintenance Grove gmk4100lDocument294 pagesManuel de Maintenance Grove gmk4100lmaxime lemeslePas encore d'évaluation
- TADANO FAUN Loadchart - Abbaques Grue Mobile ATF70-4Document12 pagesTADANO FAUN Loadchart - Abbaques Grue Mobile ATF70-4guillaume letarouillyPas encore d'évaluation
- Synco 700 Régulateur Modulaire de Cascade Chaudières RMK770: Manuel TechniqueDocument240 pagesSynco 700 Régulateur Modulaire de Cascade Chaudières RMK770: Manuel TechniqueFrançois DolveckPas encore d'évaluation
- ELAD FDM-DUO - User Manual v2.1 FR - Mode D'emploiDocument95 pagesELAD FDM-DUO - User Manual v2.1 FR - Mode D'emploiAbbou Sidi Mohammed RedaPas encore d'évaluation
- KST ArcTech Basic 11 FRDocument79 pagesKST ArcTech Basic 11 FRLeonardo CruzPas encore d'évaluation
- KST SafeRangeMonitoring 31 FRDocument109 pagesKST SafeRangeMonitoring 31 FRsosoPas encore d'évaluation
- FR Mise en Service VEGABAR 83 4 20 MaDocument88 pagesFR Mise en Service VEGABAR 83 4 20 MasebPas encore d'évaluation
- Man Directives de Carrossage Truck: Séries TG ÉditionDocument426 pagesMan Directives de Carrossage Truck: Séries TG Éditionturpin100% (1)
- PicoscopeDocument23 pagesPicoscopeturpinPas encore d'évaluation
- Catalogue-2019-V2 (1) Gregoire Et BarilleauDocument115 pagesCatalogue-2019-V2 (1) Gregoire Et BarilleauturpinPas encore d'évaluation
- My OrdersDocument1 pageMy OrdersturpinPas encore d'évaluation
- DAF - Messages CAN XFDocument2 pagesDAF - Messages CAN XFturpinPas encore d'évaluation
- DAF - Informations CAN XFDocument3 pagesDAF - Informations CAN XFturpinPas encore d'évaluation
- 08 - Informations D'entretienDocument39 pages08 - Informations D'entretienturpinPas encore d'évaluation
- EWWD-DJYNN (A) - EWWD-CJYNN - EWWQ-AJYNN (A) - D-10100-0702A-FR - OM - FR - Operation Manuals - FrenchDocument32 pagesEWWD-DJYNN (A) - EWWD-CJYNN - EWWQ-AJYNN (A) - D-10100-0702A-FR - OM - FR - Operation Manuals - FrenchZakiFroidPas encore d'évaluation
- Toyota HighlanderDocument10 pagesToyota HighlanderJean-Baptiste BizetPas encore d'évaluation
- SB SbyDocument3 pagesSB Sbykorray1Pas encore d'évaluation
- 1TXH000221C0301 Batiments Et InfrastructuresDocument36 pages1TXH000221C0301 Batiments Et InfrastructuresMokhtar BeghielPas encore d'évaluation
- Audiosystem Twister f2Document76 pagesAudiosystem Twister f2Antonino RomanoPas encore d'évaluation
- GRGRFGFRGFDocument16 pagesGRGRFGFRGFwqwkwkPas encore d'évaluation
- 05-Notion de Filetage - 2018-2019Document4 pages05-Notion de Filetage - 2018-2019Yahya AIDARAPas encore d'évaluation
- Sujet MC Ta Session 2018 Dossier Technique Complet CopieDocument19 pagesSujet MC Ta Session 2018 Dossier Technique Complet Copieissa issoPas encore d'évaluation
- Mendaci 123Document37 pagesMendaci 123ELmokhtar HamrouniPas encore d'évaluation
- Electropalan HE2002015Document2 pagesElectropalan HE2002015Remus CalinaPas encore d'évaluation
- Détermination de Section Des ConducteursDocument9 pagesDétermination de Section Des ConducteursmohamedhriziPas encore d'évaluation
- TDM850 1996 4TX AF1 Manuel AtelierDocument323 pagesTDM850 1996 4TX AF1 Manuel AtelierVDBPas encore d'évaluation
- Chap 2 EngrenagesDocument19 pagesChap 2 EngrenagesMhd Koundio100% (1)
- Manuel 676599 7Document88 pagesManuel 676599 7q.berthelot14Pas encore d'évaluation
- Web PT French MetricDocument32 pagesWeb PT French Metricstevebouassa4Pas encore d'évaluation
- MR315ESPACEDDocument374 pagesMR315ESPACEDPascal ColasPas encore d'évaluation
- El63-El63m 2006Document32 pagesEl63-El63m 2006Robert LamyPas encore d'évaluation
- Nettoyage Du Condenseur de ClimatisationDocument6 pagesNettoyage Du Condenseur de ClimatisationChristophe MaseltophePas encore d'évaluation
- 2024 - Cfs - Quads - ScratchDocument11 pages2024 - Cfs - Quads - ScratchGregPas encore d'évaluation
- Gradateurs CoursDocument19 pagesGradateurs CoursMohammed ChnafaPas encore d'évaluation
- productTechnicalSheet MIELE KD 26022 WSDocument1 pageproductTechnicalSheet MIELE KD 26022 WSBrigitte LANDAISPas encore d'évaluation
- 02 FT HSL 3 2012 06Document4 pages02 FT HSL 3 2012 06Rosemary GuerreroPas encore d'évaluation
- Check Liste Voiture OccasionDocument3 pagesCheck Liste Voiture OccasionRabah Benallal100% (1)
- SysLog1 05 CompteursRegistresDocument19 pagesSysLog1 05 CompteursRegistresJunior DADJINPas encore d'évaluation
- Eval Conduite Doc EnseignantDocument12 pagesEval Conduite Doc EnseignantJerome ERNESTPas encore d'évaluation
- Elektor N° 49-50 - Juillet-Août 1982Document140 pagesElektor N° 49-50 - Juillet-Août 1982Jean-Marie FrancoisPas encore d'évaluation
- KANGOO - DiagnosticDocument364 pagesKANGOO - Diagnosticsddsdd100% (6)
- Université Du Lac Tanganyika: Cours de L'Initiation A L'InformatiqueDocument161 pagesUniversité Du Lac Tanganyika: Cours de L'Initiation A L'InformatiqueCuba Arm ArmelPas encore d'évaluation
- Fusibles Et RelaisDocument6 pagesFusibles Et RelaisAmir_KaderPas encore d'évaluation
- Etude D'Ascenseur Commandé Par Automate ProgramableDocument91 pagesEtude D'Ascenseur Commandé Par Automate ProgramableMontassar BoujlelPas encore d'évaluation