Vous aimerez peut-être aussi
- La Stabilité Des Navires Pour Les NulsDocument7 pagesLa Stabilité Des Navires Pour Les Nulskgrustkiller100% (2)
- RapportDocument20 pagesRapportwatsopPas encore d'évaluation
- Effort Sur Une VoileDocument45 pagesEffort Sur Une VoilealiabdalghafourPas encore d'évaluation
- Calcul CareneDocument2 pagesCalcul Careneمحمد الأمين شرفاويPas encore d'évaluation
- 7 - Mecanique 1Document9 pages7 - Mecanique 1Billy SilvaPas encore d'évaluation
- Virtual Regatta ManuelDocument69 pagesVirtual Regatta Manuelalainconu50% (4)
- Cours de NavigationDocument113 pagesCours de NavigationAmine Jog100% (4)
- Physique PSI 2Document10 pagesPhysique PSI 2Yahya El GueddariPas encore d'évaluation
- Mines Ponts PSI 2014 Sujet PDFDocument12 pagesMines Ponts PSI 2014 Sujet PDFImane MadouimPas encore d'évaluation
- Poussee Darchimede Et Portance Encyclopedie EnvironnementDocument8 pagesPoussee Darchimede Et Portance Encyclopedie EnvironnementFor DrivePas encore d'évaluation
- MDF1Document4 pagesMDF1benyfirstPas encore d'évaluation
- TD1 Bouee Houlomotrice BisDocument8 pagesTD1 Bouee Houlomotrice BiselkabbabiyPas encore d'évaluation
- Stabilité TPDocument15 pagesStabilité TPNordine YahiaouiPas encore d'évaluation
- 2ie - Cours Sur Les Travaux Maritimes - Novembre2013Document123 pages2ie - Cours Sur Les Travaux Maritimes - Novembre2013jumeau1100% (4)
- $RR8GMX2Document187 pages$RR8GMX2ghalem bennailaPas encore d'évaluation
- Bases de La Dynamique (Ex)Document4 pagesBases de La Dynamique (Ex)Brice NgondjetPas encore d'évaluation
- Memento de Stabilite 1Document17 pagesMemento de Stabilite 1Abd OuPas encore d'évaluation
- TD2 Igmp1 2019-2020Document2 pagesTD2 Igmp1 2019-2020Chaimae Ben hadouPas encore d'évaluation
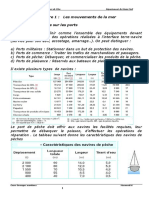
- Chap 1 Cours OM Les Mouvements de La MerDocument5 pagesChap 1 Cours OM Les Mouvements de La MerRAHMA ABDELLIPas encore d'évaluation
- ImportantDocument12 pagesImportantMohammed AfkirPas encore d'évaluation
- Exercices 1 Mouvement de Chute Verticale D'un SolideDocument1 pageExercices 1 Mouvement de Chute Verticale D'un Solideoperarep35Pas encore d'évaluation
- 080 Mécanique Du Vol - Chap02Document22 pages080 Mécanique Du Vol - Chap02Franck DuroisinPas encore d'évaluation
- Er2 Meca 2017Document3 pagesEr2 Meca 2017NoemPas encore d'évaluation
- Effet Du Vent Sur La StabiliteDocument19 pagesEffet Du Vent Sur La StabiliteHamid HamiPas encore d'évaluation
- MDF CahierTD 150908a PDFDocument13 pagesMDF CahierTD 150908a PDFEl Ghazaoui MouatazPas encore d'évaluation
- Modele - de - Systeme - de - DefencDocument16 pagesModele - de - Systeme - de - DefencARAFAPas encore d'évaluation
- Simulation Numérique D'une Vague DéferlanteDocument26 pagesSimulation Numérique D'une Vague DéferlanteBernard SCHAEFFERPas encore d'évaluation
- Seance 02 - Generalite Sur La RTDocument10 pagesSeance 02 - Generalite Sur La RTbelkacem moulayPas encore d'évaluation
- JH2022 BarthelemyDocument13 pagesJH2022 BarthelemyLaurent BARTHELEMYPas encore d'évaluation
- Manoeuvres Au MoteurDocument29 pagesManoeuvres Au Moteurboujnite100% (1)
- Buoy DesignDocument14 pagesBuoy DesignVelmohanaPas encore d'évaluation
- 13-1 - ChuteVertfrSM16-17 - CopieDocument5 pages13-1 - ChuteVertfrSM16-17 - CopieÃnas OuchtobanePas encore d'évaluation
- 7 - Mecanique 1Document9 pages7 - Mecanique 1YassinePas encore d'évaluation
- Calcul de L'energie D'accostageDocument6 pagesCalcul de L'energie D'accostageCLEMENTPas encore d'évaluation
- 2019 CtresEtrangers Exo2 Sujet SautSansParachute 6ptsDocument3 pages2019 CtresEtrangers Exo2 Sujet SautSansParachute 6ptsLowel SAPORPas encore d'évaluation
- 2011.TH18228.Rammal - Hussein.Chapitre 2 PDFDocument29 pages2011.TH18228.Rammal - Hussein.Chapitre 2 PDFRedouane FirdaoussiPas encore d'évaluation
- Sujet CommunDocument39 pagesSujet CommunSimon BardetPas encore d'évaluation
- Hydraulique MaritimeDocument8 pagesHydraulique MaritimeMatch TubePas encore d'évaluation
- Technologie Du Navire M1Document285 pagesTechnologie Du Navire M1Massi Aia80% (5)
- TP ResistanceDocument11 pagesTP ResistancehamzaPas encore d'évaluation
- Principe de Vol CH 01Document13 pagesPrincipe de Vol CH 01MohamedAmineZemniPas encore d'évaluation
- 2023 Asie J2 Exo3 Sujet ChpEGoutteEau 5 5ptsDocument2 pages2023 Asie J2 Exo3 Sujet ChpEGoutteEau 5 5ptsheyitsnotme1505Pas encore d'évaluation
- TD4-mécanique Des FluidesDocument12 pagesTD4-mécanique Des FluidesSAYOURI MOHAMMEDPas encore d'évaluation
- Recommadations Pour Calcul Ouvrage Ensite AquatiqueDocument7 pagesRecommadations Pour Calcul Ouvrage Ensite AquatiqueKarim Kameni100% (1)
- PSI PHYSIQUE CCP 1 2011.enonceDocument11 pagesPSI PHYSIQUE CCP 1 2011.enonceMeriem El AbzazePas encore d'évaluation
- Chapitre VI Roulis Et TangageDocument7 pagesChapitre VI Roulis Et TangageMustapha MobarkiPas encore d'évaluation
- CCS MP 2019 RobotSousMarinROV SujetDocument16 pagesCCS MP 2019 RobotSousMarinROV SujetTheKing 68Pas encore d'évaluation
- 080 Mécanique Du Vol - Chap03Document18 pages080 Mécanique Du Vol - Chap03Franck DuroisinPas encore d'évaluation
- Conception Bateau PDFDocument23 pagesConception Bateau PDFJari Lahcen100% (1)
- TD Flottaison-Poussee D ArchimedeDocument1 pageTD Flottaison-Poussee D Archimedenouna1nounaPas encore d'évaluation
- Exam Méc Fluides ImprtantDocument10 pagesExam Méc Fluides ImprtantyounesfirminioPas encore d'évaluation
- Annales de Stabilite Pour OCQPDocument6 pagesAnnales de Stabilite Pour OCQPFlorimond NcPas encore d'évaluation
- Projet Meca Flu 2022Document10 pagesProjet Meca Flu 2022AminPas encore d'évaluation
- L'Interaction D U Propulseur E T D E La Carene Et Soneffet Sur Les Vibrations de Torsion D E La Ligne D'Arbres. Par M. G. AerïssenDocument33 pagesL'Interaction D U Propulseur E T D E La Carene Et Soneffet Sur Les Vibrations de Torsion D E La Ligne D'Arbres. Par M. G. AerïssenMed Amine RessadPas encore d'évaluation
- Mécanique Des FluidesDocument28 pagesMécanique Des Fluidespedro66Pas encore d'évaluation
- Nouveau manuel complet de marine seconde partie: manoeuvresD'EverandNouveau manuel complet de marine seconde partie: manoeuvresPas encore d'évaluation
- Navigation: Les Grands Articles d'UniversalisD'EverandNavigation: Les Grands Articles d'UniversalisPas encore d'évaluation
- Nouveau manuel complet de marine première partie: gréementD'EverandNouveau manuel complet de marine première partie: gréementPas encore d'évaluation
- Cours Navigation Aérienne Cycles Techniciens Et CCAP-CCA Chapitre 2Document59 pagesCours Navigation Aérienne Cycles Techniciens Et CCAP-CCA Chapitre 2Armel KPAKPOPas encore d'évaluation
- Document:: IND23 - France Côtes de CorseDocument283 pagesDocument:: IND23 - France Côtes de CorseSd Capitaine UlyssePas encore d'évaluation
- EXP-MN-SE030-FR-R0 - 1 - Symboles Et Normes PDFDocument112 pagesEXP-MN-SE030-FR-R0 - 1 - Symboles Et Normes PDFmahmoudmain_24273317Pas encore d'évaluation
- INT1 FR Ed6 2016Document124 pagesINT1 FR Ed6 2016Ahmad AfandiPas encore d'évaluation
- Symbol Abbreviations Canadian ChartsDocument132 pagesSymbol Abbreviations Canadian ChartsAhmed Sewelam100% (1)
- Cap 200 Annexes II III Referentiel Evaluation 01 09 2015Document12 pagesCap 200 Annexes II III Referentiel Evaluation 01 09 2015YASSINE MSALEKPas encore d'évaluation
- Texte TodDocument4 pagesTexte TodOussama SaidPas encore d'évaluation
- Cours de CartographieDocument103 pagesCours de Cartographiesoufianeomari1998Pas encore d'évaluation
- Cours de NavigationDocument314 pagesCours de Navigationmed amine hamimid100% (1)
- DDDDDDDocument13 pagesDDDDDDtotoPas encore d'évaluation
- Cerf Volant GuideDocument86 pagesCerf Volant GuideJean-Luc LehnPas encore d'évaluation
- Lexique Et Liens UtilesDocument24 pagesLexique Et Liens UtilesYassine MalkiPas encore d'évaluation
- Conversion Des UnitésDocument19 pagesConversion Des UnitésJohakim974Pas encore d'évaluation
- 1 - Navig OCQP PDFDocument42 pages1 - Navig OCQP PDFSékou Doumbouya100% (3)
- Se Reperer en MerDocument9 pagesSe Reperer en MerGPas encore d'évaluation
- Document L9Document566 pagesDocument L9ravelobePas encore d'évaluation
- TOP323 - Mod - 2 - Notions Préliminaires Et Carnets de Notes - BonDocument22 pagesTOP323 - Mod - 2 - Notions Préliminaires Et Carnets de Notes - BoncarlPas encore d'évaluation
- Glossaire Du Transport MaritimeDocument9 pagesGlossaire Du Transport MaritimeMANDIAYEPas encore d'évaluation
- Le Droit International Public PDFDocument36 pagesLe Droit International Public PDFFatimazahraPas encore d'évaluation
- Chapitre Vi Le VentDocument18 pagesChapitre Vi Le VentdilhanejuniordjiadeuPas encore d'évaluation
- NavigationDocument20 pagesNavigationmog samedPas encore d'évaluation
- MesuresDocument2 pagesMesuresjohn ngandouPas encore d'évaluation
- Physique Chimie 15Document19 pagesPhysique Chimie 15nermopiyu0% (1)
- 2) La Conquete de Nouveaux Espaces Enjeux Diplomatique Et CoopérationDocument15 pages2) La Conquete de Nouveaux Espaces Enjeux Diplomatique Et Coopérationquentin kosPas encore d'évaluation
- Vocabulaire Normalisé de La Navigation MaritimeDocument61 pagesVocabulaire Normalisé de La Navigation MaritimeRALISONPas encore d'évaluation
- Can Evas MercatorDocument4 pagesCan Evas Mercatorsailor21316Pas encore d'évaluation
- Navcot 01 C - de La Sphere A La Carte MarineDocument29 pagesNavcot 01 C - de La Sphere A La Carte MarineAdil SadokPas encore d'évaluation