Vous aimerez peut-être aussi
- Cours de Math Ing-79Document1 pageCours de Math Ing-79Hafsa LamrabatPas encore d'évaluation
- Transforme de LaplaceDocument20 pagesTransforme de Laplaceahcene2010Pas encore d'évaluation
- TD4 LaplaceDocument8 pagesTD4 LaplaceŒū Ssa MēPas encore d'évaluation
- Outils Pour Le Calcul Scientifique Correction D'exercicesDocument12 pagesOutils Pour Le Calcul Scientifique Correction D'exercicesgaetan vetsoupePas encore d'évaluation
- Serie TD 1Document2 pagesSerie TD 1amhPas encore d'évaluation
- Tlaplace Pour DébutantsDocument2 pagesTlaplace Pour DébutantsKenla Charly juniorPas encore d'évaluation
- Math Transformee de LapaceDocument1 pageMath Transformee de LapacePape samba MbayePas encore d'évaluation
- TdmlapDocument4 pagesTdmlapAdam Ahmat AbakarPas encore d'évaluation
- TD Bis LaplaceDocument6 pagesTD Bis LaplaceMiguel AngePas encore d'évaluation
- Fiche Transformée de Laplace 2010-2011 RDocument4 pagesFiche Transformée de Laplace 2010-2011 RRodrigue patrice Njounhassi koagnePas encore d'évaluation
- Taik Cours3 TL TFDocument20 pagesTaik Cours3 TL TFaityahiamassyliaPas encore d'évaluation
- Solution LaplaceDocument6 pagesSolution LaplacelhardrockPas encore d'évaluation
- Math IngDocument35 pagesMath IngYoussef RagraguiPas encore d'évaluation
- Transformee de LaplaceDocument8 pagesTransformee de LaplaceDilane FonkouPas encore d'évaluation
- Seance7 8 Solution PDFDocument6 pagesSeance7 8 Solution PDFTouoyemPas encore d'évaluation
- Controle Continu1&2Document5 pagesControle Continu1&2Edouard Mvogo BileguePas encore d'évaluation
- Cours HSDocument10 pagesCours HSRedouan TottiPas encore d'évaluation
- Feuille 3Document15 pagesFeuille 3Emy ManiPas encore d'évaluation
- Td2 Algèbre 2 - SolutionsDocument10 pagesTd2 Algèbre 2 - SolutionssamiraPas encore d'évaluation
- Automatique Transf LaplaceDocument5 pagesAutomatique Transf LaplaceNaoufel FaresPas encore d'évaluation
- TD TL3 Cor2Document2 pagesTD TL3 Cor2Ndeye Anta THIAMPas encore d'évaluation
- Corrige Examen S5 CHTheor Janv 2016Document12 pagesCorrige Examen S5 CHTheor Janv 2016Mohamed sadik50% (2)
- GELE2511 Ch2Document13 pagesGELE2511 Ch2kimPas encore d'évaluation
- Transformation de Laplace Et Fonctions à Variables Complexes Cours Et TD 2Document18 pagesTransformation de Laplace Et Fonctions à Variables Complexes Cours Et TD 2Asmaa KhhPas encore d'évaluation
- Ch3 Trans Laplace Maths3Document13 pagesCh3 Trans Laplace Maths3si salem tassaditPas encore d'évaluation
- TDLap 1Document2 pagesTDLap 1Antipas Komi Mawuli AziawaPas encore d'évaluation
- Math IngDocument52 pagesMath IngbejoudouaaPas encore d'évaluation
- Fiche I-Mat 204Document3 pagesFiche I-Mat 204KamPas encore d'évaluation
- Transformée de LaplaceDocument8 pagesTransformée de LaplaceZayene KhmaisPas encore d'évaluation
- TD2 SALC GabourDocument4 pagesTD2 SALC Gabourachelirayane7Pas encore d'évaluation
- TD Séries FourierDocument9 pagesTD Séries FourierYoussef ArPas encore d'évaluation
- Transformada de LaplaceDocument3 pagesTransformada de LaplaceJeisson Andres Carvajal RamirezPas encore d'évaluation
- CorrectionTD 4 ENIBDocument5 pagesCorrectionTD 4 ENIBYassine SariaPas encore d'évaluation
- Chapitre5 LaplaceDocument27 pagesChapitre5 LaplaceJoseph MahéPas encore d'évaluation
- Teori LaplaceDocument9 pagesTeori LaplaceKamalPas encore d'évaluation
- Correction TD6Document1 pageCorrection TD6NessPas encore d'évaluation
- Seance6-7-Solution Tansforme de LaplaceDocument5 pagesSeance6-7-Solution Tansforme de LaplaceAdama MaigaPas encore d'évaluation
- Transformede LaplaceDocument17 pagesTransformede LaplaceMohamed AIT KASSIPas encore d'évaluation
- Exercies LapalceDocument3 pagesExercies Lapalcenour1960Pas encore d'évaluation
- Chapitre 1 TLDocument13 pagesChapitre 1 TLmaymoun jabnouniPas encore d'évaluation
- 2019 12 09 IntegrationDocument5 pages2019 12 09 IntegrationMouncef AsryPas encore d'évaluation
- EExam Math3 2023Document5 pagesEExam Math3 2023zaim zaimPas encore d'évaluation
- Chapitre 2 Transformee LaplaceDocument10 pagesChapitre 2 Transformee Laplacemouna100% (1)
- RT S2 M5.1 AnalyseII CRS Boulaamayel - 2Document13 pagesRT S2 M5.1 AnalyseII CRS Boulaamayel - 2labakoum badr-eddinePas encore d'évaluation
- TD 1 Meca2 AutomatiqueDocument2 pagesTD 1 Meca2 AutomatiqueRyemPas encore d'évaluation
- DerpartDocument18 pagesDerpartKaoutar SalamPas encore d'évaluation
- Transforme de LaplaceDocument5 pagesTransforme de LaplacewwiissPas encore d'évaluation
- TD Laplace Cle09f6a1Document3 pagesTD Laplace Cle09f6a1Lawrd RrafiePas encore d'évaluation
- DGC TD Transformée LaplaceDocument2 pagesDGC TD Transformée LaplaceespoirdibansaPas encore d'évaluation
- Sujet1 Maths 2 Mines PSI 2012Document2 pagesSujet1 Maths 2 Mines PSI 2012Abdelghani HarajPas encore d'évaluation
- Polymaths1a 051212 Chap4Document6 pagesPolymaths1a 051212 Chap4Said BelkhirPas encore d'évaluation
- Laplace 2008Document39 pagesLaplace 2008Hassna BounouaderPas encore d'évaluation
- CINFORMELLE Exercice7Document4 pagesCINFORMELLE Exercice7Khouloud ŚaPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
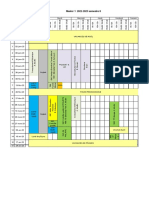
- EDT 22 - 23 - M1S2 - Méca - 14 - 12 - 22Document1 pageEDT 22 - 23 - M1S2 - Méca - 14 - 12 - 22Kenla Charly juniorPas encore d'évaluation
- TD de de Transfert de Chaleur Avec SolutDocument55 pagesTD de de Transfert de Chaleur Avec SolutEl Haddam Asmae100% (4)
- Chapitre-4-Les-Transformations-A-Etat-Solide-Des-Alliages Fe-CDocument29 pagesChapitre-4-Les-Transformations-A-Etat-Solide-Des-Alliages Fe-CKenla Charly juniorPas encore d'évaluation
- Tlaplace Pour DébutantsDocument2 pagesTlaplace Pour DébutantsKenla Charly juniorPas encore d'évaluation
- Flyer SUMPPS RDV en Ligne Étudiants ExtracommDocument2 pagesFlyer SUMPPS RDV en Ligne Étudiants ExtracommKenla Charly juniorPas encore d'évaluation
- Math 332 Edo Edp SuiteDocument8 pagesMath 332 Edo Edp SuiteKenla Charly juniorPas encore d'évaluation
- Fiche TD 332Document2 pagesFiche TD 332Kenla Charly juniorPas encore d'évaluation
- EDP1Document7 pagesEDP1Kenla Charly juniorPas encore d'évaluation
- Coefficient de Convection ThermiqueDocument3 pagesCoefficient de Convection ThermiqueKenla Charly juniorPas encore d'évaluation
- PHYS 326 ChapIntro - Modes - de - TransfertDocument4 pagesPHYS 326 ChapIntro - Modes - de - TransfertKenla Charly juniorPas encore d'évaluation
- Exp02 - Cste de Stefan-BoltzmannDocument12 pagesExp02 - Cste de Stefan-BoltzmannKenla Charly juniorPas encore d'évaluation
- Chapitre1 - Généralités Sur Les SignauxDocument15 pagesChapitre1 - Généralités Sur Les Signauxmehdi.chetiouiPas encore d'évaluation
- Cours 1Document3 pagesCours 1beckerrolandhPas encore d'évaluation
- Tabti, AzedineDocument125 pagesTabti, Azedineimene chatlaPas encore d'évaluation
- TP N°1 Génération Et Affichage Des Signaux ContinusDocument3 pagesTP N°1 Génération Et Affichage Des Signaux ContinusAbdelillah TemmimPas encore d'évaluation
- Hervé Perroud Université de Pau Et Des Pays de L AdourDocument34 pagesHervé Perroud Université de Pau Et Des Pays de L Adourali dimaPas encore d'évaluation
- Chapitre 1Document9 pagesChapitre 1samvipPas encore d'évaluation
- TDN 4: Transform EeenzDocument2 pagesTDN 4: Transform Eeenzgringo yesoPas encore d'évaluation
- Quelques Applications de La Distribution de Dirac en PhysiqueDocument11 pagesQuelques Applications de La Distribution de Dirac en PhysiqueGuillo Andry0% (1)
- Chaine - Mesure S4 PDFDocument173 pagesChaine - Mesure S4 PDFCh KawtarPas encore d'évaluation
- Automatique ch1 Signaux ContinusDocument21 pagesAutomatique ch1 Signaux ContinusEsteban hubertPas encore d'évaluation
- TD ECE 2 Corrige PartielDocument4 pagesTD ECE 2 Corrige Partielsam0% (1)
- ExamenP3 PDFDocument40 pagesExamenP3 PDFCh KawtarPas encore d'évaluation
- 7C-TdS-DSF Et TFTC PDFDocument19 pages7C-TdS-DSF Et TFTC PDFAnis KhPas encore d'évaluation
- Cours Traitement Du Signal 2017 Final V10Document52 pagesCours Traitement Du Signal 2017 Final V10guyllaumeadimouPas encore d'évaluation
- Traitement Signal - ELMqDocument91 pagesTraitement Signal - ELMqDhoha GasmiaPas encore d'évaluation
- PHYS708 Traitement SignalDocument44 pagesPHYS708 Traitement SignalbouzidiPas encore d'évaluation
- Chapitre 10 Les Distributions PDFDocument10 pagesChapitre 10 Les Distributions PDFAhmed RabiiPas encore d'évaluation
- Poly MathsDocument67 pagesPoly Mathsnguyencharles42Pas encore d'évaluation
- Communications Num Eriques Travaux Pratiques (21h) Mod Elisation Et Etude D'une Cha Ine de Communication Num EriqueDocument15 pagesCommunications Num Eriques Travaux Pratiques (21h) Mod Elisation Et Etude D'une Cha Ine de Communication Num EriqueAnimeMusicVideo [Legend-Anime]Pas encore d'évaluation
- Echantillonnage Et Restitution Des Circuits Freddy MudryDocument40 pagesEchantillonnage Et Restitution Des Circuits Freddy MudryHerve DerouleauxPas encore d'évaluation
- Traitement Signal Analogique NumeriqueDocument72 pagesTraitement Signal Analogique Numeriquebouzid mhamdiPas encore d'évaluation
- Traitement Du Signal3Document10 pagesTraitement Du Signal3Ilyas KendouciPas encore d'évaluation
- Cours Insa Lyon CNDocument158 pagesCours Insa Lyon CNSalah-Eddine NasmiPas encore d'évaluation
- Fascicule Des Travaux Pratiques en Transmissions Numeriques 29oct2018Document27 pagesFascicule Des Travaux Pratiques en Transmissions Numeriques 29oct2018Mahdi KachouriPas encore d'évaluation
- TD Tns m1 PDFDocument40 pagesTD Tns m1 PDFAboubacryPas encore d'évaluation
- Cours CompletDocument78 pagesCours CompletTaoufik Ait LaydiPas encore d'évaluation
- Ahmed Lesfari-Distributions, Analyse de Fourier Et Transformation de Laplace - Cours Et Exercices-Ellipses Marketing (2012)Document388 pagesAhmed Lesfari-Distributions, Analyse de Fourier Et Transformation de Laplace - Cours Et Exercices-Ellipses Marketing (2012)toumping chrifo100% (2)
- Chapitre1 - Transformée de FourierDocument33 pagesChapitre1 - Transformée de FourierHicham Baghdadi0% (1)
- DistributionsDocument96 pagesDistributionsAbdesslam GuennouniPas encore d'évaluation
- Systèmes AsservisDocument178 pagesSystèmes Asserviskarima230100% (3)