Vous aimerez peut-être aussi
- TD Automatique 1A 2016 JMD 2Document20 pagesTD Automatique 1A 2016 JMD 2Adil ChentoufPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- TD Automatique 1A 2016 JMDDocument20 pagesTD Automatique 1A 2016 JMDFaïssolath Achirou100% (1)
- TD Automatique 1A JMD 2011Document20 pagesTD Automatique 1A JMD 2011Hajri MohamedPas encore d'évaluation
- Série Rég GM - GIDocument5 pagesSérie Rég GM - GINisrine DaoukiPas encore d'évaluation
- 144 Tdautomatique Tsi SpeDocument4 pages144 Tdautomatique Tsi SpeYoussef SadikPas encore d'évaluation
- Examaster 20Document3 pagesExamaster 20sdik aichaPas encore d'évaluation
- 1 Sujet BE 1 2 3 2022 RegulDocument6 pages1 Sujet BE 1 2 3 2022 RegulBaptiste CapaiPas encore d'évaluation
- Poly TD-Regul NumDocument12 pagesPoly TD-Regul NumIslam BensediraPas encore d'évaluation
- TD PDFDocument20 pagesTD PDFabidinePas encore d'évaluation
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- TD Regul PDFDocument11 pagesTD Regul PDFSouhaib LoudaPas encore d'évaluation
- TD CNDocument25 pagesTD CNHasnae Segaoui100% (1)
- TPDocument21 pagesTPAnonymous zt0fAEcKO3Pas encore d'évaluation
- TP1 Simulation D'un MCCDocument4 pagesTP1 Simulation D'un MCCRonel valere FeussiPas encore d'évaluation
- Ments 2Document4 pagesMents 2ELmokhtar HamrouniPas encore d'évaluation
- Epreuve Automatique Mai 2013Document6 pagesEpreuve Automatique Mai 2013jobPas encore d'évaluation
- Evaluation Finale S2 Automatique 2022Document4 pagesEvaluation Finale S2 Automatique 2022OMAR RAHALIPas encore d'évaluation
- TD 01 GPCDocument2 pagesTD 01 GPCkhaledteslaPas encore d'évaluation
- Correction TP1 PDFDocument8 pagesCorrection TP1 PDFmehdi aoues100% (1)
- TD1 Regulation IndustrielleDocument8 pagesTD1 Regulation IndustrielleZakaria BencherkiPas encore d'évaluation
- Fiche TD 2 Correction 2 1Document5 pagesFiche TD 2 Correction 2 1angelico josephPas encore d'évaluation
- TP1 SarDocument4 pagesTP1 SarMbaira LeilaPas encore d'évaluation
- Chapitre 4 Application Et Etude de CasDocument16 pagesChapitre 4 Application Et Etude de CasflokiPas encore d'évaluation
- Devoir Auto2 19-20Document5 pagesDevoir Auto2 19-20Houda BourimechPas encore d'évaluation
- Utomatique Ravaux Pratiques Éance N: 1 Asservissement en Vitesse D'une Machine À Courant ContinuDocument3 pagesUtomatique Ravaux Pratiques Éance N: 1 Asservissement en Vitesse D'une Machine À Courant ContinuPRIMEMYTHOPas encore d'évaluation
- TD01Asservissements1 PDFDocument10 pagesTD01Asservissements1 PDFELmokhtar Hamrouni100% (2)
- 2CPI CC1 AsservDocument2 pages2CPI CC1 AsservANDAHMOUPas encore d'évaluation
- tdm1 Idim-PenteDocument38 pagestdm1 Idim-PenteElectro Study100% (1)
- Examen 2019-2020 D'identification Et ModélisationDocument3 pagesExamen 2019-2020 D'identification Et Modélisationarwa bouazaouiPas encore d'évaluation
- Test - 2011 Rsolu 1Document11 pagesTest - 2011 Rsolu 1usr_kotoPas encore d'évaluation
- TP 1Document2 pagesTP 1Khaled LahianiPas encore d'évaluation
- TP Auto MEEA 04 05 PDFDocument88 pagesTP Auto MEEA 04 05 PDFYassine RabhiPas encore d'évaluation
- Examen SALC 2022Document1 pageExamen SALC 2022nurPas encore d'évaluation
- TP AutomatiqueDocument24 pagesTP AutomatiqueHoussam Haddani100% (1)
- Exercices Regulation HEI42TCDocument60 pagesExercices Regulation HEI42TCMohamed Ben Fredj79% (14)
- TD SAMP 3.2 ParaboleDocument3 pagesTD SAMP 3.2 ParaboleSoulaiman AndahmouPas encore d'évaluation
- 2-Série TD EE PDFDocument2 pages2-Série TD EE PDFHfgjjPas encore d'évaluation
- TD 2 AutomatiqueDocument12 pagesTD 2 AutomatiqueNawres AbbessiPas encore d'évaluation
- TD01 Asservissements 1Document10 pagesTD01 Asservissements 1fekielyes100% (1)
- TP Retour D'étatDocument3 pagesTP Retour D'étatDamon Salvatore73% (11)
- Asservissement CN MCC ING1 ING2Document6 pagesAsservissement CN MCC ING1 ING2Eya KhPas encore d'évaluation
- TD - 3 NumeriqueDocument2 pagesTD - 3 NumeriqueMouloudPas encore d'évaluation
- TD2 RégulationDocument8 pagesTD2 RégulationsonamoffothierryPas encore d'évaluation
- TD AsservissementDocument17 pagesTD AsservissementSOUFIANE BOURCHIHPas encore d'évaluation
- Sujet1 Robotique AitlahcenDocument4 pagesSujet1 Robotique AitlahcenCaptain Teddy BearPas encore d'évaluation
- TP ObservationDocument7 pagesTP Observationjob100% (2)
- Ventilation Artificilelle Les FondamentauxDocument19 pagesVentilation Artificilelle Les FondamentauxRogerPas encore d'évaluation
- Fiabilité Et Maintenance Des Systèmes ÉlectroniquesDocument18 pagesFiabilité Et Maintenance Des Systèmes ÉlectroniquesmahdiPas encore d'évaluation
- Solution Aut05Document8 pagesSolution Aut05mahdiPas encore d'évaluation
- M2 INSTR Corrigé EMD1 2019 Faib. Et MaintDocument3 pagesM2 INSTR Corrigé EMD1 2019 Faib. Et Maintmahdi100% (1)
- Solution Aut06Document8 pagesSolution Aut06mahdiPas encore d'évaluation
- Solution Aut04Document9 pagesSolution Aut04mahdiPas encore d'évaluation
- Exam Aut06Document6 pagesExam Aut06mahdiPas encore d'évaluation
- Exam Aut2001Document4 pagesExam Aut2001mahdiPas encore d'évaluation
- Correction Emd Robotique Industrielle Slamani m1 FabDocument2 pagesCorrection Emd Robotique Industrielle Slamani m1 FabmahdiPas encore d'évaluation
- Cours de RobotiqueDocument72 pagesCours de Robotiquemahdi100% (1)
- Referentiel Construction Universitaire-1Document18 pagesReferentiel Construction Universitaire-1BCPas encore d'évaluation
- Kitchen Xtone 2023Document89 pagesKitchen Xtone 2023Murat KanberoğluPas encore d'évaluation
- Factures Etudes 2014Document14 pagesFactures Etudes 2014Achour SiderPas encore d'évaluation
- CM1 L9 Ranger Des Fractions Simples 2020Document3 pagesCM1 L9 Ranger Des Fractions Simples 2020koss koss100% (1)
- Les Interjections Et Les Onomatopées - Quelle Est La Richesse Apportée Par Leur Utilisation Dans La Bande DessinéeDocument18 pagesLes Interjections Et Les Onomatopées - Quelle Est La Richesse Apportée Par Leur Utilisation Dans La Bande DessinéePinar SezerPas encore d'évaluation
- Les Éléments Chimiques Dans L'univers - 1ère - Cours Enseignement Scientifique - KartableDocument2 pagesLes Éléments Chimiques Dans L'univers - 1ère - Cours Enseignement Scientifique - KartableHello HelloPas encore d'évaluation
- Beer-Lambert Smartphone Cuso4: 1 Utilisation de 2 Smartphones Pour Analyser La Composition D'Une So-Lution - MpsDocument7 pagesBeer-Lambert Smartphone Cuso4: 1 Utilisation de 2 Smartphones Pour Analyser La Composition D'Une So-Lution - MpsJean-Serein MbendePas encore d'évaluation
- AP FonctionsDocument2 pagesAP FonctionsMarlèneAndrieuPas encore d'évaluation
- Livre MMCDocument172 pagesLivre MMCFRANCKY JORDAN NJOCKE NDIKIPas encore d'évaluation
- Cours Phonolgie 2LMD - 3Document15 pagesCours Phonolgie 2LMD - 3Ouassila DjekidaPas encore d'évaluation
- Cours de MR Cailler Épistémologie de La Communication Des OrganisationsDocument30 pagesCours de MR Cailler Épistémologie de La Communication Des OrganisationsNicolasAPas encore d'évaluation
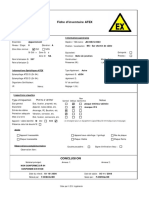
- Fiche D'inventaire ATEX: Informations Générales Appontement EnvironnementDocument2 pagesFiche D'inventaire ATEX: Informations Générales Appontement EnvironnementMohammed DjelailiPas encore d'évaluation
- Méthode de Résolution de Problèmes Et Outils AssociésDocument17 pagesMéthode de Résolution de Problèmes Et Outils AssociésbinlinPas encore d'évaluation
- Compte Rendu FonderieDocument9 pagesCompte Rendu FonderiedmedmahdiPas encore d'évaluation
- CE WOURI EXAM BLANC PROB IH AVRIL 2024Document2 pagesCE WOURI EXAM BLANC PROB IH AVRIL 2024Valere DJOHPas encore d'évaluation
- Document - Unique - Evaluation - Risques - Professionnels ZMDocument11 pagesDocument - Unique - Evaluation - Risques - Professionnels ZMMariano OKEPas encore d'évaluation
- Entretien Et Depannage PDFDocument157 pagesEntretien Et Depannage PDFMãl ÎkPas encore d'évaluation
- Activite 2 5e Semaine 1Document2 pagesActivite 2 5e Semaine 1Aboubacar KountaPas encore d'évaluation
- Grimoire Magie Terre BLANCDocument38 pagesGrimoire Magie Terre BLANCflorent34150100% (2)
- Devoir SondeDocument6 pagesDevoir Sondewassime FassiPas encore d'évaluation
- Referentiel RSE en LogistiqueDocument228 pagesReferentiel RSE en LogistiqueMarshall WilliamsPas encore d'évaluation
- Routiers: Prévention D'effondrement Liés Souterraines Solution Renforcement RemblaisDocument12 pagesRoutiers: Prévention D'effondrement Liés Souterraines Solution Renforcement RemblaisPaul Zephyrin AwonaPas encore d'évaluation
- Vibration SystemsDocument24 pagesVibration SystemsaliPas encore d'évaluation
- Projet de Thèse - Mamadou COULIBALYDocument5 pagesProjet de Thèse - Mamadou COULIBALYMamadou CoulibalyPas encore d'évaluation
- Devoir de Synthèse N°2 - Sciences Physiques - 1ère AS (2013-2014) MR Alibi AnouarDocument3 pagesDevoir de Synthèse N°2 - Sciences Physiques - 1ère AS (2013-2014) MR Alibi AnouarimedPas encore d'évaluation
- Epistémologie Des Sciences HumainesDocument2 pagesEpistémologie Des Sciences HumainesmeldimanchePas encore d'évaluation
- SVT 3ème - L10 - La Dégradation Du SolDocument7 pagesSVT 3ème - L10 - La Dégradation Du SolYVESPas encore d'évaluation
- 09 Cours Statistiques Pourcentages ProbabiliteDocument19 pages09 Cours Statistiques Pourcentages ProbabiliteOtmane LhmPas encore d'évaluation
- HTTP WWW - Electrostimulateurs-Manuels - FR Fichiers Manuels Globus Elite-S2 Elite-S2-Genesy-S2-Duo-TensDocument40 pagesHTTP WWW - Electrostimulateurs-Manuels - FR Fichiers Manuels Globus Elite-S2 Elite-S2-Genesy-S2-Duo-TensMEDARBEL AbdelkrimPas encore d'évaluation
- Convection Forcee Dans Des Surfaces PlanDocument8 pagesConvection Forcee Dans Des Surfaces Planim enePas encore d'évaluation
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Le must bilingue™ du lycéen Vol. 2 - les maths en anglaisD'EverandLe must bilingue™ du lycéen Vol. 2 - les maths en anglaisPas encore d'évaluation