Académique Documents
Professionnel Documents
Culture Documents
Cours Machines Continues
Transféré par
Nouredine NacoulmaTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Cours Machines Continues
Transféré par
Nouredine NacoulmaDroits d'auteur :
Formats disponibles
LA MACHINE A COURANT CONTINU CONSTITUTION
M.C.C.
Rotor ou induit Pôle auxiliaire de
commutation
Induit bobiné Inducteur
Bobinage Induit
Ventilateur
Balais
Balai et porte balai
Inducteur Enroulement de
Compensation
Bobinage d’excitation
collecteur
Collecteur
stator
Mme CONGO ISGE 2020 1 Mme CONGO ISGE 2020 4
CONVERSION D’ENERGIE DANS LA STATOR
MACHNE A COURANT CONTINU Appelé également INDUCTEUR, il porte les pôles
Le fonctionnement en « moteur » inducteurs avec leurs bobines (enroulement
La machine absorbe une puissance électrique (qui est donc d’excitation), les pôles de commutation.
positive pour le système) pour fournir une puissance
mécanique (négative pour le système). Il magnétise la machine par l’intermédiaire d’un champ
Le transfert s’opère du réseau vers la charge mécanique au travers de la MCC. fixe constant ou réglable.
Le fonctionnement en « génératrice » Deux types d’excitation sont utilisées, soit :
La machine fournit une puissance électrique (négative) qui - à aimants permanents (excitation magnéto-électrique).
provient de la puissance mécanique. Le transfert s’opère de la Les pertes joules sont supprimées mais l’excitation
charge mécanique vers le réseau au travers de la MCC.
magnétique est constante et non réglable. Dans les grosses
machines, le coût des aimants pénalise cette solution.
Mme CONGO ISGE 2020 2 Mme CONGO ISGE 2020 5
INDUCTEUR
SYMBOLES DE LA MACHINE A
- à enroulements et pièces polaires (PP) (excitation
COURANT CONTINU
électromagnétique). Le réglage de l’excitation rend
possible le fonctionnement en survitesse. Pour les grosses
machines, le montage de pôles auxiliaires (PA) améliore la
commutation du courant dans les conducteurs de l’induit.
PP
PA
Bobinage
inducteur
Aimants
Mme CONGO ISGE 2020 3 permanents Mme CONGO ISGE 2020 6
MME CONGO ISGE 2018 1
Pôle inducteur ou pôle principal
Le bobinage est réalisé en fil
Rotor ou induit (suite)
de cuivre de section plus
faible que celui de l’induit
(cas de l’excitation
indépendante). Collecteur
L’inducteur peut être massif, mais le passage de la denture
de l’induit provoque une pulsation de flux dans la partie des Circuit magnétique de
l’induit
épanouissements polaires. Pour cette raison on réalise les
pôles inducteurs en un assemblage de tôles magnétiques
(acier à 3,5% de silicium).
Mme CONGO ISGE 2020 7 Mme CONGO ISGE 2020 10
Pôle inducteur avec bobinage et encoches
pour l’enroulement de compensation Mise en place du bobinage de l’induit
Pôle inducteur
Bobinage
inducteur
Encoches pour
enroulement de
compensation
Mme CONGO ISGE 2020 8 Mme CONGO ISGE 2020 11
ROTOR OU INDUIT
ROTOR OU INDUIT
Le circuit magnétique CM
Il est constitué de 3 parties
Bobinage
Le flux dans le circuit magnétique est variable. Pour diminuer
Circuit magnétique
Collecteur les pertes par hystérésis et courants de Foucault le CM est
feuilleté sous forme d’assemblage de tôles isolées à 3,5% de
silicium, épaisseur 0,35 mm ayant des pertes de 3 W/kg pour
une induction de 1 Tesla.
Mme CONGO ISGE 2020 9 Mme CONGO ISGE 2020 12
MME CONGO ISGE 2018 2
Circuit magnétique de l’induit ROTOR OU INDUIT (suite)
Collecteur
Départ d’une section
Retour d’une section
Lame de cuivre
Couronne de
positionnement
Arbre rotor
isolant
Écrou de serrage
C’est l’élément qui limite le plus les performances du moteur
Mme CONGO ISGE 2020 13 Mme CONGO ISGE 2020 16
ROTOR OU INDUIT (suite) COLLECTEUR (suite)
Le circuit électrique (terminologie)
Têtes de bobinage ◼ Le collecteur est le constituant critique des machines à courant
(chignons) continu car ses lames sont soumises aux efforts centrifuges.
1 section c’est :
= 2 faisceaux ◼ Son usure consécutive du frottement des balais nécessite un
= x spires démontage et un ré-usinage périodiques. De plus, il accroît de
20 à 30% la longueur de la machine.
1 faisceau =
x brins
◼ Le collecteur a pour fonction d’assurer la commutation du
courant d’alimentation dans les conducteurs de l’induit. Il est
essentiellement constitué par une juxtaposition cylindrique de
Lame du collecteur lames de cuivre séparée par des lames isolantes (généralement
en mica). Chaque lame est reliée électriquement au bobinage
induit.
Représentation d’une section
Les sections sont montées dans les encoches de l’induit
Mme CONGO ISGE 2020 14 Mme CONGO ISGE 2020 17
ROTOR OU INDUIT (suite)
On rencontre 2 sortes de bobinage COLLECTEUR (suite)
y1
y2
y1
y2
yc yc
Bobinage imbriqué Bobinage ondulé
Représentation panoramique
Yc = pas au collecteur ; y1 = pas de bobine ou pas arrière ; y2 = pas
avant.
Le choix des bobinages dépendra des courants et tensions appliquées à
l’induit.
bobinage imbriqué : forte intensité, faible tension
bobinage ondulé : faible intensité, forte tension
Mme CONGO ISGE 2020 15 Mme CONGO ISGE 2020 18
MME CONGO ISGE 2018 3
Réaction magnétique d ’induit RMI
COLLECTEUR (suite)
Ligne neutre
NN S S
W
1er : moteur
2ème : induit àseul
vide
alimenté.
seula:l’inducteur
3ème
On
fonctionnementest alimenté.
un champ transversal
moteur. On a composition des 2 champs.
au champ inducteur.
Conséquence
On a un : uniforme.
champ
Ce champ
- rotation deest de plus
la ligne faible intensité.
neutre
C ’est lui qui crée la réaction
- renforcement des lignes de champs magnétique
sous dles
’induit.
cornes polaires d ’entrée
- réduction des lignes de champs sous les cornes polaires de sortie.
Mme CONGO ISGE 2020 19 Mme CONGO ISGE 2020 22
Balais et porte-balais Correction de la RMI
L’usure du balai provoque la mise En fonctionnement moteur la RMI entraîne une
en court-circuit du collecteur
(cause des flash).
diminution du flux inducteur donc une augmentation de
la vitesse. Elle est corrigée par :
Nécessité de souffler, avec de l’air
comprimé, le collecteur et les porte- Un enroulement de compensation sur des
balais machines de puissance supérieure à 100 kW
Un balai couvre environ la largeur de 1 lame et demi.
Des pôles de commutation sur des machines de
puissance supérieure à 1 kW
La pression du balai est assurée par un ressort. Ces valeurs de puissance sont indicatives car elles varient d’un
constructeur à l’autre suivant les dispositions technologiques
La matière utilisée pour les balais est à base de graphite. adoptées.
La chute de tension eB due
Mme à un balai
CONGO est d’environ 0,3 V à 3 V. 20
ISGE 2020 Mme CONGO ISGE 2020 23
Balais et porte-balais (suite) Enroulement de compensation
Ils sont placés dans
les épanouissements
polaires et sont
connectés en série
avec l’induit.
Ils produisent un flux
inverse de la RMI.
Il est utilisé uniquement pour les inducteurs bobinés
Mme CONGO ISGE 2020 21 Mme CONGO ISGE 2020 24
MME CONGO ISGE 2018 4
Bobines de compensation Différents bobinages sur le stator
4 bobines de commutation 4 pôles inducteur
Bobines de compensation
Bobines de compensation
Mme CONGO ISGE 2020 25 Mme CONGO ISGE 2020 28
Pôles auxiliaires de commutation PRINCIPE DE FONCTIONNEMENT DE LA
MACHINE A COURANT CONTINU
Ils limitent la production Le principe de fonctionnement de la machine à courant continu (MCC)
Ils sont câblés en série avec repose sur le phénomène physique de création d’une force électromotrice
d’étincelles entre le (f.e.m) aux extrémités d’un conducteur en mouvement dans un champ
l’induit et se trouvent
collecteur et les balais par d’induction magnétique (Loi de Faraday). Réciproquement, la circulation
perpendiculaires à l ’axe de d’un courant dans ce conducteur le soumet à une force qui tend à le mettre
annulation du courant
l ’inducteur en mouvement (Loi de Laplace).
dans la section où le
courant s’inverse 1. Création d’une force électromotrice induite
Dans un repère, un conducteur de longueur L est en mouvement à vitesse
constante V dans un champ B uniforme et orthogonal au plan de
Pour des machines de petite puissance (1 à 10 mouvement du conducteur (Figure 1).
kW), on utilise cet enroulement pour faire la
compensation de la réaction magnétique
d’induit (RMI)
Mme CONGO ISGE 2020 26 Mme CONGO ISGE 2020 29
Création d’une force
Pôle auxiliaire de commutation (suite)
électromotrice induite F.E.M.
Pôle de commutation
Entre t et t+dt, le conducteur parcourt la distance élémentaire dy=V.dt
Le flux coupé par le conducteur est alors : d=B.L.dy
En appliquant la loi de Faraday, on obtient l’expression de la f.e.m induite :
d
e= = B.L.V
dt
Remarque : Si l’induction ou la vitesse changent de sens, le sens du flux
Mme CONGO ISGE 2020 27 Mme CONGO ISGE 2020 30
change et la f.e.m change de signe.
MME CONGO ISGE 2018 5
Création d’une F.E.M. (suite) PRINCIPE DU COLLECTEUR
Technologiquement, pour réaliser une M.C.C sur la base du principe 2. Principe du collecteur
précédent, le conducteur est enroulé sur un rotor cylindrique en fer de
rayon R et de longueur L, pour former une spire mise en rotation autour de L’étude précédente montre le lien entre l’amplitude de la f.e.m et les grandeurs dont elle
l’axe à la pulsation W (Figure 2). Ce circuit électrique constitue l’induit de dépend. On en tire sur le plan technologique deux conséquences :
la machine. La spire comporte un conducteur aller sous le pôle sud qui
génère une f.e.m +e et un retour sous le pôle nord qui fournit –e car la ◼ La tension est disponible aux bornes d’une spire, mais le besoin apparaît sur la partie
fixe. Il faut donc trouver un moyen d’effectuer le transfert par un contact glissant ;
vitesse est opposée à celle sous l’autre pôle. L’association en série ajoute ◼ La f.e.m est alternative. Il faut la rendre unidirectionnelle.
les deux f.e.m.
Pour assurer les deux fonctions précédentes, on met en place le collecteur : les
Pour mieux bénéficier de l’induction magnétique, le rotor est situé entre deux extrémités d’une spire sont reliées électriquement à deux lames en cuivre (Figure 5) ;
pour prélever la f.e.m sur la partie fixe, deux balais en graphite liés au stator frottent
pôles qui épousent au mieux la forme du rotor pour assurer un entrefer sur les lames.
constant et minimal. Là, le champ d’induction B est créé dans l’entrefer par
les enroulements d’inducteur. Il est normal et de module constant en tout La figure 6 montre que le collecteur assure la fonction de redresseur mécanique. On en
point de l’entrefer et par continuité à la surface du rotor aussi. déduit l’allure de la tension prélevée aux bornes des balais (Figure 7).
Mme CONGO ISGE 2020 31 Mme CONGO ISGE 2020 34
Création d’une F.E.M. (suite) PRINCIPE DU COLLECTEUR (suite)
Sous l’effet de la rotation, la spire voit l’induction sous la surface S(t) =2.R.L.sinW .t.
Par sa variation, le flux qui en découle, = B.S(t), permet de créer la f.e.m e(t) par
spire :
d dS
e (t ) = =B = 2.B.R.L.W. cos W.t = .W. cos W.t
dt dt
Mme CONGO ISGE 2020 32 Mme CONGO ISGE 2020 35
Création d’une F.E.M. (suite) PRINCIPE DU COLLECTEUR (suite)
Ce résultat montre que la f.e.m induite est proportionnelle au flux sous ◼ Constatation
un pôle et à la vitesse de rotation W . Sa représentation temporelle est à
la figure 4. Le passage de la spire sous le flux maximal (en =/2) La figure 7 montre qu’au passage de la ligne neutre, la tension s’annule. A
correspond à une f.e.m nulle. C’est à ce endroit, appelé ligne neutre, ce instant, le courant ne s’annule pas à cause du caractère inductif de la
que la f.e.m est prélevée pour être transmise à la partie fixe. spire. Pour éviter la rupture brutale du courant (et la surtension qui en
découlerait), il faut décaler légèrement les balais par rapport à la ligne
neutre pour faire coïncider les deux annulations et éviter ainsi les arcs
(étincelles) qui ont tendance à détériorer les lames du collecteur.
◼ Conclusion
Pour assurer une tension qui ne s’annule plus, il faut multiplier le nombre de
f.e.m élémentaires en multipliant le nombre de spires, c’est-à-dire en
passant à l’enroulement régulièrement répartie dans des encoches à la
surface de l’induit.
Mme CONGO ISGE 2020 33 Mme CONGO ISGE 2020 36
MME CONGO ISGE 2018 6
FORCE ELECTROMOTRICE D’UN COUPLE ELECTROMAGNETIQUE (suite)
ENROULEMENT
Un enroulement en mouvement dans un champs magnétique voit
apparaître à ses bornes une force électromotrice (f.e.m.) donnée par la
loi de Faraday. Conclusions et synthèse
Partant de ce principe, l’induit de la machine à courant continu est le siège
d’une f.e.m. E dont la valeur efficace est : ◼ Le couple délivré par la MCC dépend :
◼ de paramètres de construction, purement technologiques (p, a, et N) ;
p ◼ du paramètre de fonctionnement interne, le flux sous un pôle ;
E= N W
2a ◼ du paramètre de fonctionnement externe, le courant d’induit I.
◼ Il est indépendant de la vitesse W.
Avec :
p - le nombre de paires de pôles ;
◼ Il est résistant dans un fonctionnement en génératrice et moteur dans un
a - le nombre de paires de voies d’enroulement ; fonctionnement en moteur.
N - le nombre de conducteurs (ou brins) ;
Φ - flux maximum à travers les spires (en webers- Wb) ;
Ω - Vitesse de rotation (en rad.s-1).
Mme CONGO ISGE 2020 37 Mme CONGO ISGE 2020 40
F.E.M. (suite) PUISSANCE ELECTROMAGNETIQUE
Finalement : Si l’induit présente une f.e.m. E et s’il est parcouru par le courant I,
p
E = K W avec K= N il reçoit une puissance électromagnétique
2a
Conclusions et synthèse P em = E * I
D’après le principe de conservation de l’énergie cette puissance
La f.e.m totale de la MCC dépend : est égale à la puissance développée par le couple
◼ de paramètres de construction, purement technologiques (p, a, et N) ; électromagnétique. Donc :
◼ du paramètre de fonctionnement interne, le flux sous un pôle ;
◼ du paramètre de fonctionnement externe, la vitesse de rotation W .. P em = C em * W = E * I [Pém en watts]
De plus si la machine fonctionne à flux constant : Remarque : On retrouve la relation Cém = KΦI
E = K 'W En effet E = K.Φ.Ω donc E.I = K.Φ.Ω.I = Cém.Ω d’où Cém = K.Φ.I
avec K’ = K Φ = constante de f.e.m de la MCC.
Mme CONGO ISGE 2020 38 Mme CONGO ISGE 2020 41
COUPLE ELECTROMAGNETIQUE MODES D’EXCITATION DES MACHINES A
COURANT CONTINU
◼ Les deux brins d’une spire placée dans le champ B, subissent des Machine à excitation séparée : Machine à excitation série :
forces de Laplace F1 et F2 formant un couple de force : Ie = Iinduit
F 1 = F 2 = I .l.B
U U
◼ Pour une spire : C = 2 rF = 2 rlBI = SBI = I
Ie
Où : r - le rayon de l’inducteur ; l – la longueur de la spire.
◼ Pour l’ensemble des conducteurs de l’induit :
p
C em = 2a N I Machine à excitation dérivée : Machine à excitation composée :
Iinduit
C em = K I [ N m ] Inducteur série
U U
K est la même constante que dans la formule de la f.e.m.
Ie
Si de plus la machine fonctionne à flux constant : Inducteur parallèle
C em = K ' I
Ie
avec K’ = K
Mme CONGO ISGE 2020 39 Mme CONGO ISGE 2020 42
MME CONGO ISGE 2018 7
MODES D’EXCITATION DES MACHINES A
FONCTIONNEMENT A VIDE
COURANT CONTINU (suite)
Les propriétés des machines à courant continu dépendent du mode d’excitation.
Dans une machine à excitation séparée ou indépendante l’enroulement
d’excitation est alimenté par une source de courant continu indépendante. Dans
une machine excitée en dérivation ou parallèle, l’enroulement d’excitation est
branché entre les bornes de l’induit. Dans une machine à excitation série CARACTERIQTIQUE Ev = f(Ω) à Φ constant.
l’enroulement d’excitation est connecté en série avec l’induit. Les machines à
excitation composée ou compound comportent le plus souvent deux
enroulements d’excitation : un enroulement en dérivation et un en série. Les
génératrices excitatrices à excitation composée utilisées pour l’alimentation des E = K’Ω
enroulements rotoriques des grosses machines synchrones sont munies, pour
élargir les limites de réglage de la tension, de 3 enroulements : un indépendant,
un en série et un en dérivation. La caractéristique est linéaire tant que la
saturation n’est pas atteinte. 0
Les propriétés d’une génératrice à courant continu non chargée (I=0) se
décrivent par la caractéristique à vide Ev =f(Ie), avec W = const. Quant aux
propriétés des génératrices en charge, on en juge d’après les caractéristiques
qui établissent des relations entre les grandeurs fondamentales (la tension, U, le
Mme CONGO ISGE 2020 43 Mme CONGO ISGE 2020 46
courant débité I et le courant d’excitation Ie) de leurs circuits électriques.
FONCTIONNEMENT A VIDE
FONCTIONNEMENT EN CHARGE
Caractéristiques à vide
CARACTERISTIQUE EN CHARGE
CARACTERISTIQUE A VIDE
C’est la courbe U = f(I) relevée à vitesse constante (Ω = Cte) et à courant inducteur
Ev = f(Ie) à Ω constante. d’intensité constante (Ie = Cte).
A V
Le groupe est entraîné à vitesse constante. On ◼ Chute de tension ohmique
fait varier l’intensité du courant inducteur Ie et Ie
La résistance active du bobinage provoque une légère chute de tension ohmique dans
pour chaque point on relève la valeur de Ev l’induit : RI (courbe en gras)
N0
moteur
Le circuit de l’induit est ouvert, I = 0, et la ◼ Réaction magnétique de l’induit
tension mesurée aux bornes de la machine est Le courant qui circule dans l’induit créé un flux démagnétisant de sorte que le flux total
en charge Φcharge(Ie, I) < Φvide(Ie). Cela se traduit par une chute de tension
égale à la f.e.m. supplémentaire ΔU : c’est la réaction magnétique de l’induit.
Pour l’annuler, la machine possède sur le stator des enroulements de compensation
Puisque l’induit n’est parcouru par aucun parcourus par le courant d’induit : on dit que la machine est compensée.
courant, la machine ne fonctionne ni en
moteur ni en génératrice (Pém = 0). 0 ◼ La distribution du courant d’induit par les balais et le collecteur provoque également
une légère chute de tension (souvent négligée).
Mme CONGO ISGE 2020 44 Mme CONGO ISGE 2020 47
FONCTIONNEMENT A VIDE FONCTIONNEMENT EN CHARGE
◼ En pratique, la caractéristique à vide est affectée par le phénomène de
saturation magnétique.
◼ De 0 à A, la caractéristique est linéaire, E = K’Φ (avec K’ = KΩ).
◼ De A à B, le matériau ferromagnétique dont est constitué le moteur
commence à saturer. (la perméabilité μr n’est plus constante).
◼ Après B, le matériau est saturé, la f.e.m. n’augmente plus.
◼ La zone utile de fonctionnement de la machine se situe au voisinage du
point A.
◼ Sous le point A, la machine est sous utilisée, et après le point B les
possibilités de la machine n’augmentent plus (mais les pertes augmentent
puisque Ie augmente).
Mme CONGO ISGE 2020 45 Mme CONGO ISGE 2020 48
MME CONGO ISGE 2018 8
DIFFERENTES PERTES MOTEUR A EXCITATION
INDEPENDANTE
1. Modèle équivalent
Pertes magnétiques Pfer
Pertes ou pertes Pertes joules Pj Pertes Équations fondamentales
ferromagnétiques mécaniques
ou pertes fer Pméc E = K.Φ.Ω
Elles sont dues à Pertes dans Elles sont dues Cém = K.Φ.I
Causes l’hystérésis et aux l’induit et aux frottement U = E + R.I
courants de Foucault et l’inducteur dues des diverses
dépendent de B et de Ω. aux résistances pièces en
des bobinages. mouvement.
L’induit est en convention récepteur. Il faut deux alimentations : une pour
Utilisation de matériaux à Ventilation pour Utilisation de l’induit et l’autre pour l’inducteur.
Parades cycle d’hystérésis étroit, éviter roulements et de
comme le fer au silicium et l’échauffement lubrifiants.
le feuilletage de l’induit. excessif.
Mme CONGO ISGE 2020 49 Mme CONGO ISGE 2020 52
MOTEUR A EXCITATION
DIFFERENTES PERTES
INDEPENDANTE
◼ Pertes constantes 2. Expression de la vitesse
La somme Pc = Pfer + Pméc est appelée « pertes constantes ». Si la machine
travaille à vitesse et flux constants, les pertes fer et mécaniques sont
U − RI U RI
approximativement constantes. E = K W = U − RI W= = −
K K K
Remarque : Toute relation entre des puissances peut être ramenée à une relation
entre des couples. Il suffit de diviser cette première par la vitesse de rotation Ω Le sens de rotation dépend :
(en rad.s-1). - du sens du flux, donc du sens du courant d’excitation Ie ;
- du sens du courant d’induit I.
◼ Couple de pertes Cp
Pc est proportionnel à Ω, donc Pc = kΩ
Comme C ém = KI I = C ém
K
P c = kW = k
Donc le couple de pertes : Cp =
W W U R
Donc W = − C ém équation de la caractéris tique mécanique
Le couple de pertes est une caractéristique constante du moteur K K 2 2
quelque soit la vitesse.
U
Si C = 0, W = W 0 = vitesse de marche à vide
K
Mme CONGO ISGE 2020 50 Mme CONGO ISGE 2020 53
GENERATRICE MOTEUR A EXCITATION
INDEPENDANTE
EQUATIONS FONDAMENTALES :
E = K.Φ.Ω 3. Fonctionnement à vide
Cém = K.Φ.I
A vide, la puissance absorbée sert à compenser uniquement les pertes. La
U = E – R.I puissance utile est nulle.
Actuellement dans l’industrie, la machine à courant I 0 I n R I 0 U et finalement
continue n’est pratiquement plus utilisée pour la U − R I0 U
production d’énergie électrique. En revanche, pendant W0 =
leurs phases de freinage, les moteurs à courant continu K K
équipant les machines-outils, les engins de levage et La vitesse à vide se règle en fonction de la tension d’alimentation ou du flux
de traction peuvent fonctionner transitoirement en inducteur.
génératrice. L’énergie cinétique des charges entraînées
durant le fonctionnement en moteur peut être Remarquer la convention Attention : à vide, il ne faut jamais supprimer le courant d’excitation Ie lorsque
récupérée durant le freinage de ces charges. Elle est générateur du courant. l’induit est sous tension, car le moteur peut s’emballer.
transformée en énergie électrique par la machine, et En effet si Ie→ 0 alors → 0 et W 0 → .
elle peut être renvoyée sur le réseau avec un bon
rendement.
Mme CONGO ISGE 2020 51 Mme CONGO ISGE 2020 54
MME CONGO ISGE 2018 9
MOTEUR A EXCITATION MOTEUR A EXCITATION
INDEPENDANTE INDEPENDANTE
4. Fonctionnement en charge
C
Expression de la vitesse en fonction de la tension d’alimentation B B2 B1
U=U1
U= U2
E U − RI 1 Cr (W)
W= W= = K 2 (U − RI ) avec K2 = = Cte M3 M2 M1
K K K
A3 A2 A1
La vitesse dépend :
0 W 03 W 02 W 01 W
- de la tension d’alimentation ;
Caractéristiques mécaniques du moteur à excitation séparée pour plusieurs valeurs de la tension d’induit et
- de l’intensité du courant I imposée par le couple résistant. deux caractéristiques de charge différentes. (Tr=Cr ; Tu=Cu ; T= Cu)
U reste tout de même assez élevée devant RI. En
conséquence la vitesse de rotation est essentiellement fixée La vitesse du moteur est fixée par la tension d’induit. La charge n’a qu’une petite
par la tension d’alimentation U et varie très peut en fonction du influence sur cette vitesse.
courant, c’est-à-dire de la charge.
Les points de fonctionnement sont respectivement M1 sous la tension U1, M2
sous la tension U2 et M3 sous la tension U3.
N.B. Sur la figure Tu = Cu Mme CONGO ISGE 2020 55 Mme CONGO ISGE 2020 58
MOTEUR A EXCITATION MOTEUR A EXCITATION
INDEPENDANTE INDEPENDANTE
Exprimons le courant en fonction du couple utile : Conclusions et emplois
C Cr + Cp
I = ém =
K K Le moteur à excitation indépendante se caractérise donc par :
Le couple de pertes Cp reste constant et faible devant le couple de charge
Cr. - une vitesse sensiblement constante lorsqu’il est alimentée sous une
tension d’induit U constante, quelque soit la charge ;
I Cr
K - Une vitesse réglable de façon continue entre la vitesse maximale et
l’arrêt, quelque soit la charge lorsque U varie ;
Conclusion : - Un couple moteur qui peut être réglée indépendamment de la vitesse.
U
❑ La tension d’alimentation impose la vitesse de rotation : W
K Le moteur est donc particulièrement adapté aux entraînements de
machines nécessitant une vitesse réglable dans de grandes proportions
❑ La charge impose la valeur du courant : Cr et présentant un couple résistant important à basse vitesse (machines-
I
K outils, engins de levage).
Mme CONGO ISGE 2020 56 Mme CONGO ISGE 2020 59
MOTEUR A EXCITATION MOTEUR A EXCITATION
INDEPENDANTE INDEPENDANTE
5. Fonctionnement sous tension d’induit U réglable et à excitation constante 6. Bilan énergétique
L’expression de la vitesse à vide du moteur en fonction de la tension d’alimentation montre
que W 0 et U sont des grandeurs proportionnelles à flux constant (avec l’hypothèse
simplificatrice : RI << U). Soient :
Pour deux tensions différentes U1 et U2, les vitesses à vide sont respectivement égales à W 01 Pa la puissance absorbée (W) ;
E la f.e.m. (V) ;
et W 02 et nous pouvons écrire : Ue la tension de l’inducteur (V) ;
I le courant d’induit (A) ;
W01 = W02 = 1 Ie le courant d’inducteur (A) ;
Cém le couple électromagnétique (Nm) ;
K Pém la puissance électromagnétique (W) ;
U1 U2 Cu le couple utile (Nm) ;
Pu la puissance utile (W) ;
La vitesse d’un moteur à excitation séparée diminuant légèrement quand on le charge, les W la vitesse de rotation (rad.s-1)
Pje les pertes joules à l’inducteur (W) ;
deux caractéristiques mécaniques A1B1 (pour la tension U1) et A2B2 (pour la tension R la résistance d’induit (W) ;
U2) sont des droites parallèles et sensiblement verticales dans le plan (Cu, W ) (Fig. ci- Pj les pertes joules à l’induit (W) ;
Re la résistance d’inducteur (W).
dessous). Pfer les pertes ferromagnétiques (W) ;
Pour une charge dont la caractéristique mécanique Cr(W) est une droite , nous constatons Pméc les pertes mécaniques (w) ;
que la vitesse du groupe peut être réglée en agissant sur la tension d’alimentation (le
point de fonctionnent est M1 sous la tension U1, M2 sous la tension U2)
En particulier, il est possible de maintenir la charge immobile (point M3). Cette
Mme CONGO
propriété remarquable est intéressante ISGE
pour les 2020 de levage.
engins 57 Mme CONGO ISGE 2020 60
MME CONGO ISGE 2018 10
MOTEUR A EXCITATION
INDEPENDANTE
Moteur cc de laminoir couple max : 2500kNm à
50 tr/min, 1950
Mme CONGO ISGE 2020 61 Mme CONGO ISGE 2020 64
MOTEUR A EXCITATION
INDEPENDANTE
Exploitation du diagramme :
Exemple : Pém = Pa – Pje – Pj ; Pc = Pém – Pu
Remarque :
Toute l’énergie absorbée à l’inducteur est dissipée par effet joule. On peu omettre
l’inducteur dans le bilan des puissance et alors Pje n’apparaît pas et Pa = U.I.
❑ Les pertes fer et les pertes mécaniques sont rarement dissociées, la somme
étant les pertes constantes Pc.
❑ Si le moteur est à aimants permanent, Ue, Ie et Pje n’existent pas.
Mme CONGO ISGE 2020 62 Mme CONGO ISGE 2020 65
MOTEUR A EXCITATION
INDEPENDANTE MOTEUR A EXCITATION SERIE
7. Rendement 1. Principe
◼ L’inducteur de ce moteur est en série
= Pu = P a − pertes avec l’induit. Le courant d’induit est
également le courant d’excitation
Pa Pa I=Ie (voir modèle ci-contre).
pertes = P je + P j + P fer + P méc
◼ Pour cette étude nous supposerons
que le flux sous un pôle est
proportionnel au courant d’excitation
Du fait de ces différentes pertes, le rendement d’une machine à (=kI). C’est-à-dire que le circuit
courant continu varie antre 80 et 95 %. magnétique n’est pas saturé.
Mme CONGO ISGE 2020 63 Mme CONGO ISGE 2020 66
MME CONGO ISGE 2018 11
MOTEUR A EXCITATION SERIE MOTEUR A EXCITATION SERIE
2. Équations fondamentales : ❑ Si la caractéristique de la charge est la courbe Cr2(W) (caractéristique de type
«traction»), le point de fonctionnement passe de P1 à P3 quand la tension
d’alimentation diminue de U1 à U2.
U = E + (R + r )I = E + Rt I 5. Emplois
E = KW Ce moteur possède un fort couple de démarrage. Il est particulièrement
adapté à l’entraînement des charges exigeant un couple important au
= kI avec k = C te démarrage et à faible vitesse. On l’emploie dans le domaine des très fortes
puissances (1 à 10 MW), en traction électrique ou dans l’entraînement des
C ém = K I
laminoirs. Pour ces applications, cependant, il tend de plus en plus à être
remplacé par le moteur synchrone autopiloté ou moteur autosynchrone
à cause de ses difficultés de réalisation et son coût d’entretien.
Nous en déduisons : En petite puissance, il est employé comme démarreur des moteurs à
combustion interne dans les automobiles.
- d’une part une expression de la f.e.m. du moteur :
E = KkWI E = K ' WI te
avec K ' = Kk = c
Mme CONGO ISGE 2020 67 Mme CONGO ISGE 2020 70
MOTEUR A EXCITATION SERIE
- d’autre part une relation entre couple utile et intensité du courant
appelé par le moteur :
C u = KI = Kk I 2 C u = K ' I 2
3. Caractéristique mécanique sous tension nominale
Si nous négligeons les différentes pertes, la f.e.m. du moteur est alors
fixée par la tension aux bornes du moteur et nous pouvons écrire :
U
E =U et I=
K 'W
2
soit , ( puisque C u = K ' I 2) : C u = U' 2
KW
te
Finalement C u W2 = c
Mme CONGO ISGE 2020 68 Mme CONGO ISGE 2020 71
MOTEUR A EXCITATION SERIE SENS DE ROTATION
◼ Sous la tension nominale, le moteur à excitation en ◼ Pour changer le sens de rotation d’un moteur à courant continu, il faut
série ne peut fonctionner à faible charge (a fortiori il inverser soit I, soit Ie.
ne peut fonctionner à vide) car la vitesse dépasserait
largement la limite admise. On dit que le moteur
s’emballe. Pour le moteur à excitation série I = Ie, pour changer son sens de
rotation il faut inverser la connexion entre l’inducteur et l’induit.
4. Fonctionnement sous tension variable
La diminution de la tension permet d’obtenir un déplacement de la
caractéristique mécanique. Cr1 et Cr2 sont les caractéristiques
de deux charges différentes. Nous avons également les
caractéristiques mécaniques du moteur pour deux tensions U=U2
d’alimentation différentes U1 et U2 (U2<U1).
P1
P2
❑ Pour la caractéristique Cr1(W ), le point de fonctionnement est
P1 sous la tension U1 et devient P2 sous la tension U2. La P3
vitesse du groupe diminue considérablement sans que le
couple moteur soit affecté.
Mme CONGO ISGE 2020 69 Mme CONGO ISGE 2020 72
MME CONGO ISGE 2018 12
DEMARRAGE DES MOTEURS
A COURANT CONTINU FREINAGE DYNAMIQUE
◼ L’expression de la tension aux bornes du moteur :
Considérons un moteur shunt raccordé à une source de tension Es. Le sens du courant I1 dans
U = E + RI l’induit et la polarité de la FEM induite E0 sont tels qu’indiqués sur la figure 1a. Si l’on
néglige la résistance de l’induit, la FEM induite est sensiblement égale à la tension Es de la
Le circuit inducteur doit être alimenté avant le démarrage car le couple ne peut source.
exister que si le flux est établi dans la machine (Cém = K..I).
Au début du démarrage = 0 E = 0 et le courant de démarrage Id n’est limité
que par la résistance R de l’induit, or cette résistance est très faible.
U −E U
Id = = I n
R R
Conséquences : la pointe de courant va provoquer la détérioration de
l’induit par échauffement. Id peut être de 20 à 50 fois plus grand que le Fig. 1
courant nominal du moteur.
C’est pourquoi il ne faut jamais démarrer un moteur à courant continu sous
pleine tension sans rhéostat. Il faut limiter le courant de démarrage. En
général on admet Id = (1,5 à 2)In.
Mme CONGO ISGE 2020 73 Mme CONGO ISGE 2020 76
DEMARRAGE DES MOTEURS A
COURANT CONTINU (suite) FREINAGE DYNAMIQUE (suite)
Solutions pour limiter le courant de démarrage
Si l’on coupe l’alimentation de l’induit (figure 1.b), le moteur continue à tourner, sa
vitesse diminuant progressivement sous l’effet des pertes par frottement. D’autre
Solution 1 : on utilise des rhéostats de démarrage. part, le champ étant toujours alimenté, la FEM induite diminue au même rythme
que la vitesse. Le moteur devient alors une génératrice qui fonctionne à vide.
Un = (R+Rh)Id = (R+Rh)1,5 à 2In Si maintenant on raccorde l’induit à une résistance extérieure R (figure 1.c), la machine
Cette solution est peut économique. fonctionne toujours en génératrice et la FEM induite E0 produit un courant I2
circulant dans le sens inverse du courant original I1. Il en résulte un couple de
freinage d’autant plus grand que le courant I2 est grand. En pratique, on choisit une
Solution 2 : On démarre sous une tension d’alimentation réduite. Cette résistance R telle que le courant de freinage initial soit environ 2 fois le courant
solution est la plus employée actuellement par l’utilisation de variateurs nominal. Dans ces conditions, le couple de freinage initial est le double du couple
nominal du moteur.
électroniques.
A mesure que le moteur ralentit, la décroissance progressive de la FEM E0 produit une
Remarque. Le moteur à excitation indépendante et le moteur à excitation diminution correspondante du courant I2. le couple de freinage devient de plus en
série peuvent démarrer en charge. Mais le moteur série a un meilleur plus faible et il atteint finalement une valeur nulle lorsque l’induit cesse de tourner.
couple de démarrage.
Mme CONGO ISGE 2020 74 Mme CONGO ISGE 2020 77
ARRET D’UN MOTEUR ET
ENERGIE CINETIQUE DE ROTATION
FREINAGE DYNAMIQUE (suite)
Lorsqu’un moteur démarre avec une charge ayant une inertie importante, comme un gros volant, on Le freinage dynamique provoque donc une décroissance de la vitesse qui est rapide au début,
constate qu’il faut attendre plusieurs minutes avant qu’il n’atteigne sa vitesse de régime permanent. Si et lente vers la fin. Afin d’illustrer l’efficacité de cette méthode de freinage, nous avons
l’on coupe l’alimentation du moteur, la période de décélération est encore plus longue, et peut représenté sur la figure 2 les courbes de décélération obtenues par freinage dynamique et
atteindre une heure et plus. en débranchant simplement le moteur de la source.
Le temps requis pour amener la charge à la vitesse finale, ou pour l’arrêter, dépend de l’énergie cinétique
emmagasinée. Lors du démarrage, la charge reçoit de l’énergie du moteur mais à cause de son
couple limité, il faut attendre un temps appréciable avant que la vitesse finale soit atteinte. De même,
lors du ralentissement, si les pertes par friction et par ventilation sont faibles, une longue période doit
s’écouler avant que cette énergie soit dissipée. Une décélération lente est bien souvent inacceptable ;
on doit alors appliquer un couple de freinage pour assurer un arrêt rapide.
On pourrait évidemment freiner le moteur à l’aide d’un frein mécanique. Une approche, évitant l’usure
mécanique, consiste à freiner le moteur en faisant circuler dans l’induit un courant de sens approprié.
Pour effecteur ce freinage électromécanique, on peut utiliser deux méthodes :
Fig. 2
a) le freinage dynamique ;
b) le freinage par inversion de sens.
Mme CONGO ISGE 2020 75 Mme CONGO ISGE 2020 78
MME CONGO ISGE 2018 13
FREINAGE PAR INVERSION
FREINAGE PAR INVERSION (suite)
On peut arrêter un moteur encore plus rapidement en utilisant le
freinage par inversion. Cette méthode consiste à inverser
Pour éviter une telle catastrophe, il faut introduire une résistance Rh (R sur la figure) en
brutalement le sens du courant dans l’induit en intervertissant série avec l’induit au moment où l’on intervertit les bornes (Figure 3.b). Comme pour
le freinage dynamique, sa valeur est ajustée de façon à limiter le courant initial de
freinage I2 à environ 2 fois le courant nominal.
les bornes de la source (Figure 3)
Avec ce montage, contrairement au freinage dynamique, un couple est développé
même à l’arrêt. En effet, pour une vitesse nulle, E0=0 et I2=Es/(R+Rh), soit environ la
moitié de sa valeur initiale.
En marche normale (moteur), le courant I1 absorbé par l’induit
Dès que le moteur s’arrête, il faut ouvrir immédiatement l’interrupteur, sinon le moteur
repart en sens inverse. Habituellement, cette ouverture est commandée
vaut : I1=(Es-E0)/R, où R (R0 sur la figure) représente la automatiquement par un dispositif sensible à la vitesse nulle (Interrupteur centrifuge
par exemple).
résistance de l’induit. Si l’on intervertit subitement les bornes de
Les courbes de la Figure 2 permettent de comparer le freinage par inversion avec le
freinage dynamique, le courant initial étant le même dans les deux cas ; on constate
la source, la tension résultante agissant sur l’induit devient que le freinage par inversion arrête le moteur complètement à un instant où la
vitesse par freinage dynamique vaut encore 25% de sa valeur originale. Cependant,
la grande simplicité du freinage dynamique le rend plus populaire dans la plus part
(E0+Es). Cette tension fera aussitôt circuler dans le sens des applications.
inverse un courant dont laMme
valeur est I2=(Es+E0)/R. Si l’on 79
CONGO ISGE 2020
ne Mme CONGO ISGE 2020 82
FREINAGE PAR INVERSION
On peut arrêter un moteur encore plus rapidement en utilisant le COMMUTATION DU COURANT D’INDUIT
freinage par inversion. Cette méthode consiste à inverser
brutalement le sens du courant dans l’induit en intervertissant Lorsque l’induit et le collecteur tournent, les sections de l’enroulement
d’induit sont connectées continuellement d’une voie d’enroulement
les bornes de la source (Figure 3) parcourue par un courant d’un sens sur une autre voie parcourue par
un courant de sens inverse. Il en résulte le renversement du sens du
courant dans la section en commutation et la section se trouve court-
circuitée par des lames de collecteur et des balais.
En marche normale (moteur), le courant I1 absorbé par l’induit
Le phénomène transitoire de variation du courant dans les sections
vaut : I1=(Es-E0)/R, où R (R0 sur la figure) représente la lorsqu’elles sont commutées est appelé commutation du courant
d’induit. La commutation est considérée comme bonne lorsque la
résistance de l’induit. Si l’on intervertit subitement les bornes de variation du courant dans les sections n’est pas accompagnée
d’étincelles entre les balais et le collecteur. La surface de ce dernier
la source, la tension résultante agissant sur l’induit devient restant propre et non endommagée lorsque la machine travaille de
façon continue. Dans le cas contraire, la commutation est considérée
(E0+Es). Cette tension fera aussitôt circuler dans le sens comme mauvaise.
inverse un courant dont laMme
valeur est I2=(Es+E0)/R. Si l’on 80
CONGO ISGE 2020
ne Mme CONGO ISGE 2020 83
FREINAGE PAR INVERSION COMMUTATION DU COURANT D’INDUIT
On peut arrêter un moteur encore plus rapidement en
(suite)
utilisant le freinage par inversion. Cette méthode
consiste à inverser brutalement le sens du courant dans
l’induit en intervertissant les bornes de la source (Figure
3)
Sur la figure ci-dessous nous avons deux exemples de sections en
commutation. La Largeur du balais est choisie différemment dans les
En marche normale (moteur), le courant I1 absorbé par
l’induit vaut : I1=(Es-E0)/R, où R (R0 sur la figure) deux cas.
représente la résistance de l’induit. Si l’on intervertit
subitement les bornes de la source, la tension
résultante agissant sur l’induit devient (E0+Es). Cette
tension fera aussitôt circuler dans le sens inverse un
courant dont la valeur est I2=(Es+E0)/R. Si l’on ne
prenait aucune mesure pour le limiter, ce courant serait
énorme, plus de 50 fois supérieur à l’intensité normale. Sections
Il produirait un arc autour du collecteur provoquant la
destruction des lames, des balais et de leurs supports
avant même que les disjoncteurs de sécurité aient le
temps d’ouvrir le circuit.
Vc
Vc
Fig. 3
Collecteur Balais
Mme CONGO ISGE 2020 81 Mme CONGO ISGE 2020 84
MME CONGO ISGE 2018 14
ENROULEMENT DE COMPENSATION
COMMUTATION DU COURANT D’INDUIT
(suite)
La somme des f.e.m. induite dans une section en commutation : Certains moteurs de 100 kW à 10000 kW, utilisés pour entraîner les
laminoirs, sont soumis à des cycles de fonctionnement très exigeants.
Ils doivent accélérer, décélérer, s’arrêter, changer de sens de rotation
e = e r + ec + et dans des temps très courts. Donc, le courant circulant dans l’induit
augmente diminue et change de sens de façon saccadée, ce qui
où provoque de brusques variations de la réaction d’induit.
er - la f.e.m. de réactance, dépend de l’inductance de la section en commutation et des
inductances mutuelles entre les sections en commutation au même moment ; Pour ces moteurs, les pôles de commutation ne suffisent pas à maîtriser
ec - la f.e.m. de rotation ou de commutation créée par le champ de commutation ; complètement la réaction d’induit. On doit faire appel à un
enroulement de compensation raccordée également en série avec
et - la f.e.m. de transformation induite par la variation du flux dans la section en l’induit mais logé dans la face des pièces polaires. Tout comme
commutation. Généralement et est très faible et on la néglige. l’enroulement de commutation, cet enroulement produit une FMM égale
et opposée à la FMM de l’induit. Cependant, puisqu’il est réparti dans
plusieurs encoches, la FMM de l’induit est annulée point par point, ce
Donc : qui, permet d’éviter la distribution inégale du champ observée
e = er + ec précédemment.
La commutation est bonne si e = 0 c’est à dire que ec = er (commutation linéaire).
Mme CONGO ISGE 2020 85 Mme CONGO ISGE 2020 88
COMMUTATION DU COURANT D’INDUIT ENROULEMENT DE COMPENSATION (suite)
(suite)
Pour obtenir une commutation linéaire dans la machine on a recours aux
pôles auxiliaires pour créer le champ de commutation. Les pôles
auxiliaires PA sont disposés entre les pôles principaux PP suivant la ligne
neutre théorique. Les balais sont calés également sur cette ligne et restent
dans cette position quelque soit la charge. Le nombre de PA est égal au
nombre de PP. L’enroulement des PA est connecté en série avec
l’enroulement de l’induit.
Le circuit magnétique des pôles auxiliaires ne doit pas être saturé, pour que
l’induction de commutation varie proportionnellement au courant de l’induit
et par conséquent à la charge. A cet effet, l’entrefer au niveau des PA est
plus grand q’au niveau des PP. Les PA sont utilisés dans toutes les Bobines de compensation
machines ayant une puissance supérieure ou égale à 1 KW.
Mme CONGO ISGE 2020 86 Mme CONGO ISGE 2020 89
Pôle auxiliaire de commutation ENROULEMENT DE COMPENSATION (suite)
L’ajout d’un enroulement de compensation a une grande influence sur la
conception et la performance d’un moteur à courant continu :
Pôle de commutation
1. La longueur de l’entrefer peut être réduite car on n’a plus à se soucier de l’effet
de la réaction d’induit sur le champ de l’inducteur ;
2. L’inductance du circuit de l’induit est réduite par un facteur 4 ou 5 ; par
conséquent, le courant dans l’induit peut changer plus rapidement, ce qui
assure une meilleure réponse de la machine ;
3. Le couple crête peut atteindre 3 ou 4 fois le couple nominal du moteur. Le
couple crête d’un moteur non compensé est limité à des valeurs nettement plus
faibles en raison de la réaction d’induit qui affaiblit le flux Φ provenant de
l’inducteur ;
4. Lors des changements brusques, la possibilité de créer un arc entre les balais à
la surface du collecteur est réduite.
L’enroulement de compensation est essentiel sur les gros moteurs à C.C. qui
doivent subir des variations de charge très brusques.
Mme CONGO ISGE 2020 87 Mme CONGO ISGE 2020 90
MME CONGO ISGE 2018 15
MOTEURS A AIMANTS PERMANETS Figure b’ Figure a
Dans le moteur à excitation électromagnétique le champ magnétique est
produit par un courant d’excitation circulant dans les bobines excitatrices. Figure c’
L’énergie dépensée, la chaleur dégagée et l’espace relativement important
occupée par ces bobines constitue parfois des inconvénients du moteur à
C.C. conventionnel. On peut éviter ces inconvénients en remplaçant les
bobines par des aimants permanents. Il en résulte un moteur plus petit et QUADRANTS DE
qui ne risque pas de s’emballer à cause d’une défaillance du champ. FONCTIONNEMENT
De plus, comme la perméabilité des aimants est presque égale à celle de l’air,
la longueur effective de l’entrefer est augmentée des dizaines de fois. Par Figure a’ Figure b
conséquent, la réaction d’induit crée un champ magnétique beaucoup plus
faible que celui résultant de l’utilisation de pièces polaires en fer doux. Le
champ créé ne subit dons pas une forte distorsion. Par conséquent, la
commutation et la capacité de surcharge du moteur sont améliorées. Un
dernier avantage provient du fait que l’inductance de l’induit est réduite,
ce qui diminue le temps de réponse de la machine lors de changements
rapides du courant d’induit. Figure c
Mme CONGO ISGE 2020 91 Mme CONGO ISGE 2020 94
MOTEURS A AIMANTS PERMANETS QUADRANTS DE FONCTIONNEMENT
(suite) (suite)
La figure a montre le circuit de la machine lorsqu’elle fonctionne comme moteur. La tension Es de la
source est légèrement supérieure à la FEM induite E0, de sorte que le courant I entre par la
borne positive (+). La résistance de l’induit étant R, la valeur du courant I est donnée par :
−
I = Es E0
R
Une machine fonctionne aussi en moteur dans le quadrant 3, sauf que le couple et la vitesse sont
Aimants tous deux inversés par rapport au quadrant 1 ( figure a’ ). Dans le cas illustré, on a simplement
permanents changé la polarité de la source Es.
Lorsque le moteur fonctionne dans le quadrant 4, sa vitesse est positive alors que le couple est
négatif (figure b). Le moteur fonctionne donc comme générateur. Cette condition se produit
Mentionnons toutefois deux inconvénients de ce type de moteur : le coût relativement lorsque la FEM induite E0 est plus grande que celle de la source. Par conséquent, le courant
élevé des aimants et l’impossibilité d’augmenter la vitesse du moteur en réduisant le sort par la borne (+) de E0. Puisque le courant entre par la borne (+) de la source, la puissance
champ magnétique. débitée par la machine est fournie à la source, exception faite des pertes dissipées dans la
résistance R. dans ces conditions, le moteur ralentit, et on dit qu’il y a freinage par
récupération d’énergie. A mesure que la machine ralentit, l’énergie cinétique des parties
Les moteurs à aimants permanents sont particulièrement utiles dans la gamme des
puissances inférieures à 5 kW. Les aimants utilisés sont en ferrite ou en alliage de tournantes est retournée au réseau d’alimentation. Dans le cas des gros moteurs, on préfère ce
terres rares et de cobalt. mode de freinage à celui où l’énergie est simplement dissipée en chaleur.
Mme CONGO ISGE 2020 92 Mme CONGO ISGE 2020 95
QUADRANTS DE FONCTIONNEMENT
QUADRANTS DE FONCTIONNEMENT (suite)
Nous venons de voir les divers équipements utilisés pour le démarrage et l’arrêt des moteurs Toujours dans le cadran 4, si l’on intervertit la polarité de Es, la polarité de E0 agit
à courant continu. Nous avons vu aussi qu’il existe des applications industrielles où un dans le même sens que celle de la source (figure c) la valeur du courant est
moteur doit fonctionner à des vitesses et couples variables, parfois dans les deux sens maintenant :
de rotation. En plus d’agir comme moteur, la machine doit fonctionner comme générateur
+
ou comme frein pendant de courts intervalles. Par exemple, dans une locomotive I = Es E0
électrique le moteur peut tourner dans le sens horaire ou antihoraire et le couple peut R
agir soit dans le même sens que la rotation, soit dans le sens opposé. En d’autres mots,
la vitesse et le couple peuvent être positifs ou négatifs, indépendamment l’un de l’autre.
Il en résulte un fort courant qui circule dans le sens indiqué. Le moteur débite une
puissance E0I en même temps que la source débite une puissance EsI. La
Ce comportement d’un entraînement électrique peut être décrit au moyen d’un graphique. somme de ces deux puissances est dissipée dans la résistance R. dans ces
Les vitesses positives et négatives sont affichées sur l’axe horizontal, tandis que les circonstances, même si le moteur fonctionne encore en générateur, on dit qu’il
couples positifs et négatifs sont représentés sur l’axe vertical. Les deux axes séparent le agit en frein parce que la puissance électrique qu’il génère est entièrement
graphique en quatre quadrants de fonctionnement, identifiés respectivement quadrants convertie en chaleur dans la machine. Le rendement est nul et l’induit du moteur
1,2,3,4. surchauffe rapidement.
Lorsqu’une machine fonctionne dans le cadran 1, le couple et la vitesse sont positifs, de Lorsque le moteur fonctionne dans le cadrant 2, les conditions sont analogues à
sorte que ces deux grandeurs agissent dans le même sens (disons dans le sens celle du quadrant 4, sauf que la polarité des tensions, le sens des courants, la
horaire). Par conséquent, une machine fonctionnant dans ce cadrant fonctionne vitesse et le couple sont inversées.
nécessairement en moteur : elle fournit de la puissance mécanique à la charge.
Mme CONGO ISGE 2020 93 Mme CONGO ISGE 2020 96
MME CONGO ISGE 2018 16
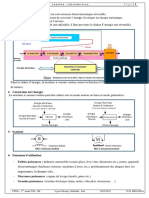
Refroidissement du M.C.C Structure de la machine industrielle
La figure ci-dessous présente la vue éclatée d’une machine à
Inducteur courant continu industrielle. On y retrouve tous les éléments
elles peuvent être plus importantes que dans l’induit. présentés dans ce cours. On voit aussi apparaître des
organes technologiques permettant la ventilation, la
manutention, le guidage de l’arbre du rotor et les connexions.
Les principales sources de chaleur .
Elles sont essentiellement dues aux pertes par
effet joule dans les conducteurs électriques
Induit
Dans le cas d’un inducteur à aimants permanents il
n’y pas de pertes à ce niveau.
Mme CONGO ISGE 2020 97 Mme CONGO ISGE 2020 100
CONCLUSION
L ’évacuation des sources de chaleur La machine à courant continu a été durant de nombreuses années l’actionneur
principalement utilisé dans les applications à vitesse variable. En effet,
se fait par 3 modes de transfert comme cela a été mis en évidence, le contrôle de la vitesse de rotation peut
être aisément réalisé par action sur la f.e.m d’induit de la machine. Sur un
autre plan, on peut agir sur le flux inducteur qui est réglé par le courant dans
l’inducteur (appelé aussi courant d’excitation).
conduction rayonnement convection
* naturelle Mais le transit de la puissance par des contacts glissants au niveau du collecteur
* forcée rend cette machine fragile. Elle réclame un entretien périodique des balais
et des lames du collecteur, voir du changement préventif de ces organes.
C’est pourquoi dans les applications de puissance, elle tend actuellement à
être remplacée par la machine asynchrone beaucoup plus robuste et plus
économique. En raison de lois de fonctionnement non linéaires, il faut
associer cette dernière à des convertisseurs appropriés (exemple :
cycloconvertisseur…).
Mme CONGO ISGE 2020 98 Mme CONGO ISGE 2020 101
Refroidissement
Du point de vue industriel lorsqu’on installe une Mcc, c’est
pour l’utiliser associée à un variateur
FIN
on fixe un ventilateur qui fonctionne indépendamment de la
Mcc. La circulation d’air dans l’entrefer est ainsi forcée.
Excepté : robotique, équipement automobile, petite puissance.
Mme CONGO ISGE 2020 99 Mme CONGO ISGE 2020 102
MME CONGO ISGE 2018 17
LITERATURE SUR LES MACHINES
ELECTRIQUES
1. A. FOUILLET. Machines Électriques.
2. J. CHATELAIN. Machines Électriques T1 et T2.
3. J. L. DALMASSO. Cours d’Électrotechnique T1 et T2.
4. M KOSTENKO et L. PIOTROVSKI. Machines électriques. T1 et T2.
5. M. POLOUJADOFF. Exercices et problèmes en Électrotechnique.
6. A. I. SMOLENSKI. Machines Électriques.
7. A. FOUILLET. Problèmes d’Électrotechnique à l‘usage des ingénieurs.
8. A. HEBERT. Machines Électriques. T1 et T2.
Mme CONGO ISGE 2020 103
MME CONGO ISGE 2018 18
Vous aimerez peut-être aussi
- 5.moteurs À Courant ContinuDocument68 pages5.moteurs À Courant ContinuMohamed LahninePas encore d'évaluation
- Moteur CCDocument15 pagesMoteur CCl-ambiance-2011Pas encore d'évaluation
- Electrotechnique 2 GET - Chap I - Machine A Courant ContinuDocument15 pagesElectrotechnique 2 GET - Chap I - Machine A Courant Continurajaa latifiPas encore d'évaluation
- 1461240Document7 pages1461240chaouqiPas encore d'évaluation
- Presser La Touche F5 Pour Faire Apparaître Les Signets Qui Favorisent La Navigation Dans Le DocumentDocument11 pagesPresser La Touche F5 Pour Faire Apparaître Les Signets Qui Favorisent La Navigation Dans Le DocumentAZZOUZ MOHAMMED CHARIFPas encore d'évaluation
- Machines Electriques: Ismael DriouchDocument110 pagesMachines Electriques: Ismael DriouchSALMA SAIKOUKPas encore d'évaluation
- La Machine À Courant Continu: B Sur Im Passant Dans Des Brins de Conducteurs OrthogoDocument7 pagesLa Machine À Courant Continu: B Sur Im Passant Dans Des Brins de Conducteurs Orthogoi.baddouPas encore d'évaluation
- 01 Machine À Courant Continu v2Document55 pages01 Machine À Courant Continu v2esto-mct1-2018 RDM-ESC-CAO-3DPas encore d'évaluation
- McccorDocument6 pagesMcccorkakaPas encore d'évaluation
- UntitledDocument24 pagesUntitledAkram BENACHOURPas encore d'évaluation
- Simulateur Éolien Sous Psim Article Revue 3EIDocument7 pagesSimulateur Éolien Sous Psim Article Revue 3EIjmroussel100% (1)
- Diapo 4 - Moteur À Courant Continu-1Document20 pagesDiapo 4 - Moteur À Courant Continu-1celeste.obongaPas encore d'évaluation
- TP Ing1 Machines TournatesDocument48 pagesTP Ing1 Machines Tournatespierre vojnovicPas encore d'évaluation
- Cours C 1 MCCDocument6 pagesCours C 1 MCCUmar MuhammetPas encore d'évaluation
- 01 Machine À Courant Continu v2Document57 pages01 Machine À Courant Continu v2El faalah MedaymanPas encore d'évaluation
- Cours Moteur CCDocument4 pagesCours Moteur CCDaniel TOMBEPas encore d'évaluation
- Machine À Courant Continu IDocument60 pagesMachine À Courant Continu IhafidPas encore d'évaluation
- Machine À Courant Continu IDocument60 pagesMachine À Courant Continu IkingfakPas encore d'évaluation
- Machine À Courant Continu I PDFDocument60 pagesMachine À Courant Continu I PDFhafidPas encore d'évaluation
- Cours Electromecanique MiniereDocument11 pagesCours Electromecanique MinieresouhaboumarafPas encore d'évaluation
- Chp.2-Machines À Courant ContinuDocument47 pagesChp.2-Machines À Courant ContinuTHONYPas encore d'évaluation
- Chapitre 4 - Les Machines A Courant Continu MCCDocument10 pagesChapitre 4 - Les Machines A Courant Continu MCCʚǐɞ Zõlã ʚǐɞPas encore d'évaluation
- TD Béquille Premiere FaitDocument7 pagesTD Béquille Premiere FaitWhavoPas encore d'évaluation
- TP MCC RenduDocument15 pagesTP MCC RenduKouokam mbobda pascalPas encore d'évaluation
- Cours - MCC - IntroductionDocument8 pagesCours - MCC - IntroductionLa ReinaPas encore d'évaluation
- 2F.C22 - Machine À Courant ContinuDocument5 pages2F.C22 - Machine À Courant ContinuUmar MuhammetPas encore d'évaluation
- 5.cours MCCDocument27 pages5.cours MCCDadi AzizPas encore d'évaluation
- Cours Modelisation de La Machine A Courant ContinuDocument9 pagesCours Modelisation de La Machine A Courant ContinuDjalti mohamedPas encore d'évaluation
- Chp.4-Machine À Courant ContinuDocument37 pagesChp.4-Machine À Courant ContinuIbrahim SanoussiPas encore d'évaluation
- M203 Installation Et Réparation de Moteurs Et de Génératrices À C. CDocument9 pagesM203 Installation Et Réparation de Moteurs Et de Génératrices À C. Cmarwanehasanidourdini177248Pas encore d'évaluation
- Chapitre6 MCCDocument11 pagesChapitre6 MCCmaroua belhadjPas encore d'évaluation
- Tp3 Mas CaractDocument5 pagesTp3 Mas CaractDaly ZeddiniPas encore d'évaluation
- Machine Synchrone Annimation Et DetailsDocument45 pagesMachine Synchrone Annimation Et DetailsHaJar SolDaPas encore d'évaluation
- Support Cours ME2-Partie 3 - 2GEDocument47 pagesSupport Cours ME2-Partie 3 - 2GEMohammed MamdouhPas encore d'évaluation
- 5 - Association Convertisseur - Moteur À Courant ContinuDocument54 pages5 - Association Convertisseur - Moteur À Courant Continurajaa latifi100% (1)
- Injecteurs Piezo Electriques PDFDocument2 pagesInjecteurs Piezo Electriques PDFLuc Mutombo MukuluPas encore d'évaluation
- Cours - Machine À Courant ContinuDocument39 pagesCours - Machine À Courant ContinuAbderrazzak TaPas encore d'évaluation
- Chapitre 2 - MCC - ÉtudiantsDocument43 pagesChapitre 2 - MCC - ÉtudiantsminatoonPas encore d'évaluation
- SujetDocument15 pagesSujetDemostene NeacsiuPas encore d'évaluation
- Généralités Sur Les Machines À Courant ContinuDocument10 pagesGénéralités Sur Les Machines À Courant Continuidir baloulPas encore d'évaluation
- Cours - Machines À Courant ContinuDocument11 pagesCours - Machines À Courant ContinuNasit Mohammed100% (1)
- Cours moteurCCDocument9 pagesCours moteurCClarabiPas encore d'évaluation
- TD Réducteur Roue Et Vis RoulementsDocument4 pagesTD Réducteur Roue Et Vis RoulementsThierry OUAMBO FOTSOPas encore d'évaluation
- Chapitre6 MCC ConvertiDocument15 pagesChapitre6 MCC ConvertiWissal HilelPas encore d'évaluation
- MCCDocument77 pagesMCCYassine Rajawi Pur100% (1)
- MSAP ENS Multon PDFDocument62 pagesMSAP ENS Multon PDFAFAFPas encore d'évaluation
- MCC DétailléDocument13 pagesMCC Détailléoumaima arbiPas encore d'évaluation
- Msap Ens MultonDocument62 pagesMsap Ens MultonkerkniPas encore d'évaluation
- Compte Rendu TP2 - Machine À Courant ContinuDocument9 pagesCompte Rendu TP2 - Machine À Courant ContinuAbderrahim HamdadPas encore d'évaluation
- MCC 5 16Document36 pagesMCC 5 16Islam MezPas encore d'évaluation
- La Machine À Courant Continu: GénéralitésDocument13 pagesLa Machine À Courant Continu: Généralitésouadah mohamedPas encore d'évaluation
- 4.alternateur 2Document52 pages4.alternateur 2dfgmy100% (1)
- Technologie Machine A Courant Continu-2Document70 pagesTechnologie Machine A Courant Continu-2axo2010Pas encore d'évaluation
- Support Cours-Partie 4-MS-2GE Version Imprimée2021Document145 pagesSupport Cours-Partie 4-MS-2GE Version Imprimée2021Mouad NntsntzPas encore d'évaluation
- Extrait 42283210 PDFDocument116 pagesExtrait 42283210 PDFBousmaha YoucefPas encore d'évaluation
- OTNDocument2 pagesOTNHamma SaidiPas encore d'évaluation
- Devoir - IRT41 - Technologies Web - 2021Document3 pagesDevoir - IRT41 - Technologies Web - 2021Moustafa Abdelaziz100% (1)
- GS RC Pva 106 FR 00Document39 pagesGS RC Pva 106 FR 00Guillaume de Pluvié100% (2)
- Master Rannou PDFDocument95 pagesMaster Rannou PDFRabii MontaPas encore d'évaluation
- Examen National SVT Sciences Maths A 2019 Normale CorrigeDocument4 pagesExamen National SVT Sciences Maths A 2019 Normale CorrigeŤăhã ÊìîPas encore d'évaluation
- TD Gisement Solaire PDFDocument6 pagesTD Gisement Solaire PDFMohamed Aly Sow100% (4)
- Suspension VTTDocument4 pagesSuspension VTTmasteratsii100% (1)
- Corrigé - TP02 Java 2023Document9 pagesCorrigé - TP02 Java 2023Laila MoufakkerPas encore d'évaluation
- TIPE Thèse 1Document223 pagesTIPE Thèse 1Mr MitePas encore d'évaluation
- PHY108 Séance 4Document5 pagesPHY108 Séance 4Yao Mawohou AWILI100% (1)
- Du Plus Bête Au Plus Méchant: Solution 1.1Document3 pagesDu Plus Bête Au Plus Méchant: Solution 1.1RONICE MAMELEM DJANZEPas encore d'évaluation
- Book 2 PDFDocument13 pagesBook 2 PDFIssam AliPas encore d'évaluation
- 2008 09 Antilles Exo3 Correction Titrage DemiEq PKa 4ptsDocument2 pages2008 09 Antilles Exo3 Correction Titrage DemiEq PKa 4ptsNedim MsmPas encore d'évaluation
- Chapitre IIDocument13 pagesChapitre IIUlrich JordanPas encore d'évaluation
- Devoir 1.. 1Document1 pageDevoir 1.. 1adam boussifPas encore d'évaluation
- TD d'Acoustique.L2ARCHIDocument2 pagesTD d'Acoustique.L2ARCHIPetrovich sagloire Owabira ngomaPas encore d'évaluation
- Conception Et Implementation D'un Systeme Expert D'aide Au Diagnostique D'un PC-convertiDocument81 pagesConception Et Implementation D'un Systeme Expert D'aide Au Diagnostique D'un PC-convertiThierry Nacoulma100% (1)
- Cours Math - Séries Statistiques Doubles - Bac Sciences (2009-2010) MR Abdelbasset Laataoui PDFDocument10 pagesCours Math - Séries Statistiques Doubles - Bac Sciences (2009-2010) MR Abdelbasset Laataoui PDFamelll84Pas encore d'évaluation
- Korte Versie ReCon Walls FR Licht LRDocument12 pagesKorte Versie ReCon Walls FR Licht LRbengouaPas encore d'évaluation
- RDM2 - Chapitre 2 - Différentes Méthodes de Détermination de La Déformée-1Document14 pagesRDM2 - Chapitre 2 - Différentes Méthodes de Détermination de La Déformée-1ramy yessPas encore d'évaluation
- TD4 MathematiquesDocument2 pagesTD4 MathematiquesAli MaatouqPas encore d'évaluation
- Examen de RDM Tronc Commun - Novembre 2012Document6 pagesExamen de RDM Tronc Commun - Novembre 2012Youness ZahiPas encore d'évaluation
- Exercice N°1 (8 Points) : Lycée: Echebbi Tadhaman Devoir de SYNTHESE N°2 ProfsDocument3 pagesExercice N°1 (8 Points) : Lycée: Echebbi Tadhaman Devoir de SYNTHESE N°2 ProfsaliPas encore d'évaluation
- Le BIOSDocument15 pagesLe BIOSZait NadimPas encore d'évaluation
- Moteur FuséeDocument8 pagesMoteur FuséeRou Màissà100% (1)
- Séries Temporelles - Kouadio Charles EmmanuelDocument19 pagesSéries Temporelles - Kouadio Charles Emmanuelméthode RMarcPas encore d'évaluation
- TD 3 Microeconomie L1 S2 ToulonDocument1 pageTD 3 Microeconomie L1 S2 ToulonAbou DIENGPas encore d'évaluation
- Dossier Complet Sur ParapsychologieDocument32 pagesDossier Complet Sur Parapsychologienicole_plante67% (3)
- Cours MSP Chapitre 5Document84 pagesCours MSP Chapitre 5Maram Sellami100% (1)