Vous aimerez peut-être aussi
- Colle - 1 - CorrectionDocument3 pagesColle - 1 - CorrectionclaretPas encore d'évaluation
- TD3-2 - CorrectionDocument8 pagesTD3-2 - CorrectionReda BaddyPas encore d'évaluation
- Colle - 2 - SujetDocument4 pagesColle - 2 - SujetMarieme BoutraihPas encore d'évaluation
- Colle - 1 - SujetDocument4 pagesColle - 1 - SujetMarieme BoutraihPas encore d'évaluation
- R 2.02 Tp2 - Joint de CardanDocument12 pagesR 2.02 Tp2 - Joint de CardanNezer DecertoPas encore d'évaluation
- Corr DS RDM1 2017-2018Document3 pagesCorr DS RDM1 2017-2018Wael Ben SalemPas encore d'évaluation
- TD7 PDFDocument5 pagesTD7 PDFNarjiss ShimiPas encore d'évaluation
- Maxpid - CorrectionDocument13 pagesMaxpid - CorrectiondfffePas encore d'évaluation
- Correction TD Adhérence - Frottement PDFDocument9 pagesCorrection TD Adhérence - Frottement PDFSami BennourPas encore d'évaluation
- Colle - 4 - CorrectionDocument7 pagesColle - 4 - CorrectionMarieme BoutraihPas encore d'évaluation
- Colle - 2 - CorrectionDocument8 pagesColle - 2 - CorrectionclaretPas encore d'évaluation
- Colle - 4 - SujetDocument4 pagesColle - 4 - SujetfqhkkfgpvrPas encore d'évaluation
- Méthode de Paul, Robot 6 R À Poignet SphériqueDocument4 pagesMéthode de Paul, Robot 6 R À Poignet Sphériquegharsalli wiemPas encore d'évaluation
- Colle - 1 - CorrectionDocument4 pagesColle - 1 - CorrectionAbdelali YacoubiPas encore d'évaluation
- TD Mécanique Des StructuresDocument24 pagesTD Mécanique Des StructureshammouPas encore d'évaluation
- Td3 1 Principe Fondamental de La Statique en Chaine Ouverte Robot Ericc3Document3 pagesTd3 1 Principe Fondamental de La Statique en Chaine Ouverte Robot Ericc3ayoubamine191200617Pas encore d'évaluation
- TP-rev - Matrices - Bielle M Manivelle - SujetDocument5 pagesTP-rev - Matrices - Bielle M Manivelle - Sujetshayma MensiPas encore d'évaluation
- Chapitre 3 - Changement de RéférentielDocument10 pagesChapitre 3 - Changement de RéférentielHamza BoutlihPas encore d'évaluation
- Barre Propre PoidsDocument5 pagesBarre Propre PoidsHB RIMPas encore d'évaluation
- TD3 2Document3 pagesTD3 2Lazare BilePas encore d'évaluation
- Chapitre 1 Etude de La Deformation Du 10-11-2020Document6 pagesChapitre 1 Etude de La Deformation Du 10-11-2020Anwar RekikPas encore d'évaluation
- Mécanismes Vitesses Et Accélération - Lois Entrée/sortieDocument5 pagesMécanismes Vitesses Et Accélération - Lois Entrée/sortieFarah Farah100% (1)
- TD1 AnalyseVectorielle2019-20 Enonce-LastDocument2 pagesTD1 AnalyseVectorielle2019-20 Enonce-Lastthierry DPas encore d'évaluation
- MECA2 - Dynamique - TD2 - CorrectionDocument22 pagesMECA2 - Dynamique - TD2 - CorrectionAbo ImranPas encore d'évaluation
- Colle - 1 - CorrectionDocument2 pagesColle - 1 - CorrectionMohamed ElharouchPas encore d'évaluation
- MMC Chapitre 1 DeformationDocument24 pagesMMC Chapitre 1 Deformationkassaui mohamed100% (1)
- Chapitre 1 Etude de La Deformation Partie 1Document13 pagesChapitre 1 Etude de La Deformation Partie 1Khlif NadaPas encore d'évaluation
- TD3 - CorrectionDocument6 pagesTD3 - CorrectionNdeye coumba100% (1)
- A2 OperateursDocument4 pagesA2 OperateursAchfakidine JaovitahermannPas encore d'évaluation
- Mécanismes Vitesses Et Accélération - Lois Entrée/sortie: Cinématique Du ContactDocument13 pagesMécanismes Vitesses Et Accélération - Lois Entrée/sortie: Cinématique Du ContactMed FilaliPas encore d'évaluation
- MECA2 - Dynamique - TD1 - CorrectionDocument11 pagesMECA2 - Dynamique - TD1 - CorrectionAbo ImranPas encore d'évaluation
- ExamenElectricite Sem1 Norm L1MPI 2018-2019Document6 pagesExamenElectricite Sem1 Norm L1MPI 2018-2019Lamine BayoPas encore d'évaluation
- Chapitre 01 - 2022-2023 - Rappels-ELECT - Etudiant PDFDocument15 pagesChapitre 01 - 2022-2023 - Rappels-ELECT - Etudiant PDFaliou KEBEPas encore d'évaluation
- TD1 - CorrectionDocument17 pagesTD1 - Correctionmohamdalla46Pas encore d'évaluation
- MQ1 TDC Schrodinger LibreDocument15 pagesMQ1 TDC Schrodinger LibreallabryanzePas encore d'évaluation
- ANALYSE VECTORIELLE BisDocument11 pagesANALYSE VECTORIELLE BisBabacar NdiayePas encore d'évaluation
- TD Correction Matrices D'InertieDocument11 pagesTD Correction Matrices D'Inertiedramane ouedraogoPas encore d'évaluation
- Colle - 1 - CorrectionDocument2 pagesColle - 1 - CorrectionMohamed ElharouchPas encore d'évaluation
- 1 - TD - 4 - Solution - 4 Redressement Triphasé Non Commandé CommandéDocument16 pages1 - TD - 4 - Solution - 4 Redressement Triphasé Non Commandé CommandéIs Lam100% (3)
- Corrigé TD 1 RDM2 - El - AmineDocument35 pagesCorrigé TD 1 RDM2 - El - AmineIkram El JamaiPas encore d'évaluation
- Chapitre 2Document6 pagesChapitre 2Taha Abd El OuahadPas encore d'évaluation
- Chapitre 0Document6 pagesChapitre 0Kaniki KinPas encore d'évaluation
- Robot de Manutention LagrangeDocument11 pagesRobot de Manutention Lagrangespam namePas encore d'évaluation
- Corrigé TD5Document6 pagesCorrigé TD5Med MoussaPas encore d'évaluation
- Feuille Aide-Mémoire 3Document4 pagesFeuille Aide-Mémoire 3Sophie RichardPas encore d'évaluation
- CH1 Statique Des Fluides-1Document13 pagesCH1 Statique Des Fluides-1kawter0809Pas encore d'évaluation
- Ex - RDM 1 V2Document2 pagesEx - RDM 1 V2HB RIMPas encore d'évaluation
- TD6-2 - CorrectionDocument7 pagesTD6-2 - CorrectionMed FilaliPas encore d'évaluation
- TD2 L1-MPI Champ Potentiel 2019-20Document10 pagesTD2 L1-MPI Champ Potentiel 2019-20thierry D100% (1)
- Calcul Des Déformations Par Les Méthodes Énergétiques (CASTIGLIANO)Document20 pagesCalcul Des Déformations Par Les Méthodes Énergétiques (CASTIGLIANO)MsdPas encore d'évaluation
- MOD007357 Coursework Brief 2021 22 3Document4 pagesMOD007357 Coursework Brief 2021 22 3OzPaper HelpPas encore d'évaluation
- MOD007357 Coursework Brief 2021 22 3Document4 pagesMOD007357 Coursework Brief 2021 22 3OzPaper HelpPas encore d'évaluation
- MECA2 - Révisions - Fiche - MéthodesDocument5 pagesMECA2 - Révisions - Fiche - Méthodessalmaamane68Pas encore d'évaluation
- Corrigé D'examen Commande de Robots de Manipulation 2017 - 2018Document3 pagesCorrigé D'examen Commande de Robots de Manipulation 2017 - 2018zineb100% (1)
- PREPA ATS 20xx Notions de MathématiquesDocument4 pagesPREPA ATS 20xx Notions de MathématiquesAymerick MONINPas encore d'évaluation
- TD Correction Torseur Cin Dyn PFD TecDocument22 pagesTD Correction Torseur Cin Dyn PFD TecSd instruPas encore d'évaluation
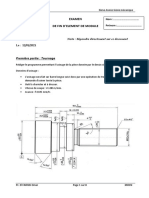
- Examen Mocn 12-01 - 2021Document8 pagesExamen Mocn 12-01 - 2021Marieme BoutraihPas encore d'évaluation
- TEC3Document17 pagesTEC3Marieme Boutraih100% (1)
- Decroissance Radioactive Cours-IDocument28 pagesDecroissance Radioactive Cours-IMarieme Boutraih100% (1)
- Risque MécaniqueDocument32 pagesRisque MécaniqueMarieme Boutraih100% (1)
- Population Et Développement Au Maroc. Chapitre 9 - Initiatives Nationales, ONG Et Coopération Internationale PDFDocument60 pagesPopulation Et Développement Au Maroc. Chapitre 9 - Initiatives Nationales, ONG Et Coopération Internationale PDFMarieme BoutraihPas encore d'évaluation
- Population Et Développement Au Maroc. Chapitre 9 - Initiatives Nationales, ONG Et Coopération Internationale PDFDocument60 pagesPopulation Et Développement Au Maroc. Chapitre 9 - Initiatives Nationales, ONG Et Coopération Internationale PDFMarieme BoutraihPas encore d'évaluation
- DpalettiseurDocument1 pageDpalettiseurMarieme BoutraihPas encore d'évaluation
- Tolérancement GPS PDFDocument24 pagesTolérancement GPS PDFkharrat samirPas encore d'évaluation
- Référentiel TCT & SMBDocument12 pagesRéférentiel TCT & SMBMarieme BoutraihPas encore d'évaluation
- Soussa Abdelbasset PDFDocument95 pagesSoussa Abdelbasset PDFJawher SalemPas encore d'évaluation
- DP Force1718 Propagation-Des-Fissures NoelsDocument37 pagesDP Force1718 Propagation-Des-Fissures NoelsMarieme BoutraihPas encore d'évaluation
- Colle - 3 - SujetDocument4 pagesColle - 3 - SujetMarieme BoutraihPas encore d'évaluation
- THMOP - 05 ClimatiseurDocument3 pagesTHMOP - 05 ClimatiseurMarieme Boutraih100% (1)
- Analyse Fonctionnelle Et Structurelle - PalettiseurDocument9 pagesAnalyse Fonctionnelle Et Structurelle - PalettiseurMarieme Boutraih100% (1)
- Maxpid - CorrectionDocument13 pagesMaxpid - CorrectiondfffePas encore d'évaluation
- 3 - Pertes de ChargeDocument12 pages3 - Pertes de ChargeMarieme Boutraih100% (1)
- Colle - 3 - SujetDocument4 pagesColle - 3 - SujetMarieme BoutraihPas encore d'évaluation
- Colle - 4 - CorrectionDocument7 pagesColle - 4 - CorrectionMarieme BoutraihPas encore d'évaluation
- 6180Document827 pages6180Justyna Podlecka67% (3)
- Le Renouveau Rural (Algérie - 2006)Document435 pagesLe Renouveau Rural (Algérie - 2006)cissmaroc100% (3)
- Tpe Seminaire Et ConferenceDocument19 pagesTpe Seminaire Et ConferenceErickPas encore d'évaluation
- Guide Anglais 1èDocument13 pagesGuide Anglais 1èMike KeitaPas encore d'évaluation
- Exercice MRPDocument2 pagesExercice MRPMõűñã BõūãbîdPas encore d'évaluation
- Ondes Sonores Fluides 1Document7 pagesOndes Sonores Fluides 1SaraIdrissiPas encore d'évaluation
- Environnement Et Changement Climatique Au MarocDocument90 pagesEnvironnement Et Changement Climatique Au MarocHichamLahbil100% (1)
- ZAP05 Pages SimplesDocument68 pagesZAP05 Pages SimplesFourier MakambioPas encore d'évaluation
- Corrigé DS01 2014 PDFDocument6 pagesCorrigé DS01 2014 PDFEssaidi AliPas encore d'évaluation
- FT 10 Dénombrement CSRDocument2 pagesFT 10 Dénombrement CSRihab hentourPas encore d'évaluation
- 4 InfrastructureDocument27 pages4 InfrastructureAhmed MediouniPas encore d'évaluation
- 8 French Werber Bernard Le Livre Du Voyage PDFDocument83 pages8 French Werber Bernard Le Livre Du Voyage PDFmariaPas encore d'évaluation
- Devoir de Contrôle N°2 1er Semestre - Math - Bac Technique (2018-2019) MR Dkhili AhmedDocument2 pagesDevoir de Contrôle N°2 1er Semestre - Math - Bac Technique (2018-2019) MR Dkhili Ahmedkougfst ldhdPas encore d'évaluation
- 2020 01 15 Liste OFDocument4 pages2020 01 15 Liste OFREHAZPas encore d'évaluation
- Guide Des Protocoles Gynecologie-ObstetriqueDocument159 pagesGuide Des Protocoles Gynecologie-Obstetriquejeannette bonivhe100% (1)
- VELLARD, Jehan - Une Civilisation Du Miel PREVIEWDocument22 pagesVELLARD, Jehan - Une Civilisation Du Miel PREVIEWResearcherPas encore d'évaluation
- InvestissementsDocument2 pagesInvestissementsMOUSSA DIABATEPas encore d'évaluation
- SOLIDEC Plusieurs PostesDocument3 pagesSOLIDEC Plusieurs PostesIr Justin MULANGIPas encore d'évaluation
- Accessoire Pour Distributeurs A Commande Electrique Connecteurs BobinesDocument5 pagesAccessoire Pour Distributeurs A Commande Electrique Connecteurs Bobinesfcbarca2020ifyPas encore d'évaluation
- Engin BTP Et Terrassement-1Document37 pagesEngin BTP Et Terrassement-1SamuelPas encore d'évaluation
- Al Simiya La Magie Des LettresDocument10 pagesAl Simiya La Magie Des LettresMoussa Bana100% (1)
- Livre Secourisme GénéralDocument91 pagesLivre Secourisme GénéralAmalia Dragan-SuciuPas encore d'évaluation
- Croquis Quartier Batignolles ParisDocument23 pagesCroquis Quartier Batignolles ParisBruno BROCHARDPas encore d'évaluation
- Epreuve Pratique CGM Chaudronnerie 2021Document34 pagesEpreuve Pratique CGM Chaudronnerie 2021ben ayed bouraouiPas encore d'évaluation
- 2013 - Audit EnergetiqueDocument58 pages2013 - Audit EnergetiqueMouhcine HajjoujePas encore d'évaluation
- Rapport Revue Processus Production Septembre 2023 (2) ADocument16 pagesRapport Revue Processus Production Septembre 2023 (2) AKOUAMEPas encore d'évaluation
- Information Metier Hotellerie Restauration Personnel Du Hall WWW - Hotellerie-Restauration - CoDocument4 pagesInformation Metier Hotellerie Restauration Personnel Du Hall WWW - Hotellerie-Restauration - CoEmploi Hotellerie RestaurationPas encore d'évaluation
- Electromag c13 SiteDocument36 pagesElectromag c13 Siteabdelilah.hassounePas encore d'évaluation
- 1 Cours Catenaire Date Inconnue FraDocument130 pages1 Cours Catenaire Date Inconnue Frasnoofsnoof100% (5)
- StatiqueDocument4 pagesStatiqueMounire BenmoussaPas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation