Vous aimerez peut-être aussi
- Exemple Fiche Entretien Vehicile Leger PDFDocument2 pagesExemple Fiche Entretien Vehicile Leger PDFOrance Omega100% (5)
- Documents Technique Boite Robotisée Clio 3 DciDocument121 pagesDocuments Technique Boite Robotisée Clio 3 DciJulien MussardPas encore d'évaluation
- Exercice 4 Banc Pneumatique A1Document2 pagesExercice 4 Banc Pneumatique A1Mohamed Amine FaidiPas encore d'évaluation
- Rapport CricDocument26 pagesRapport CricNina50% (2)
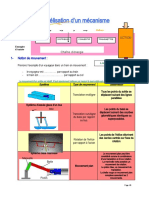
- Modelisation D'un Mécanisme Leve BarièreDocument9 pagesModelisation D'un Mécanisme Leve BarièreYoussef TrimechPas encore d'évaluation
- RDM: Lignes D'influenceDocument9 pagesRDM: Lignes D'influenceSimou El MahmodiPas encore d'évaluation
- Direction PDFDocument52 pagesDirection PDFIkeoPas encore d'évaluation
- Épreuve N° QCM Code de La Route (Durée: 25 MN - Coefficient: 1)Document8 pagesÉpreuve N° QCM Code de La Route (Durée: 25 MN - Coefficient: 1)Elio Dacruz100% (1)
- AntiplongeeDocument11 pagesAntiplongeeBlm RfkPas encore d'évaluation
- La Suspension Anti-Plongée de La Motocyclette BMW K1200SDocument9 pagesLa Suspension Anti-Plongée de La Motocyclette BMW K1200SKhaled AlouiniPas encore d'évaluation
- AntiroulisDocument8 pagesAntiroulisBoutahri MostafaPas encore d'évaluation
- Guidage ArDocument8 pagesGuidage ArAbdessamad AkennafPas encore d'évaluation
- Antiroulis PDFDocument8 pagesAntiroulis PDFberjarryPas encore d'évaluation
- CNC Corrigé 2000-2008 Physique-Chimie MPDocument339 pagesCNC Corrigé 2000-2008 Physique-Chimie MPAyoub Bennouna0% (1)
- CNC 1987 MP PhysiqueDocument5 pagesCNC 1987 MP Physiqueanass grini100% (1)
- Direction Train Suspension Moyeu Et Pneumatique5 REM TREDocument12 pagesDirection Train Suspension Moyeu Et Pneumatique5 REM TREnawara2005Pas encore d'évaluation
- Etude de La Synchronisation - SujetDocument5 pagesEtude de La Synchronisation - Sujetkld_bata100% (1)
- Clotho Ou PasDocument5 pagesClotho Ou PasTekitoPas encore d'évaluation
- Guidage ArDocument8 pagesGuidage Arsamir badriPas encore d'évaluation
- La Géométrie Des Trains Roulants - Académie de Nancy-MetzDocument10 pagesLa Géométrie Des Trains Roulants - Académie de Nancy-MetzSAADBPas encore d'évaluation
- TD MecaniqueDocument13 pagesTD MecaniqueSovann_Long80% (5)
- Cours Prof Geometrie Des Trains Roulants PDFDocument11 pagesCours Prof Geometrie Des Trains Roulants PDFfetni100% (2)
- Cours Prof Geometrie Des Trains Roulants PDFDocument11 pagesCours Prof Geometrie Des Trains Roulants PDFOncstGabesPas encore d'évaluation
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- TP - 3 Action Dun JetDocument5 pagesTP - 3 Action Dun JetYasmine YasminePas encore d'évaluation
- DS Mec401 MS 28 05 2021Document3 pagesDS Mec401 MS 28 05 2021Indescent BuchooPas encore d'évaluation
- Anticabrage 2Document12 pagesAnticabrage 2Radu MPas encore d'évaluation
- 3 A080 D 01Document7 pages3 A080 D 01SegaAlainCoulibalyPas encore d'évaluation
- TP2 APPLICATION 5 COURS Methode Des RotationsDocument9 pagesTP2 APPLICATION 5 COURS Methode Des Rotationsqzm74l100% (1)
- Cours Energetique 2022-2023Document8 pagesCours Energetique 2022-2023Milliardaire RüssëPas encore d'évaluation
- TD Méca 7:: Hangements de ReferentielsDocument3 pagesTD Méca 7:: Hangements de ReferentielsAbdeslam KasmiPas encore d'évaluation
- Calcul Des Bielles-Tirants - CopieDocument73 pagesCalcul Des Bielles-Tirants - CopieBassidi SLIMANIPas encore d'évaluation
- Chap 3 - TraficDocument29 pagesChap 3 - Traficchekkari minaPas encore d'évaluation
- TD Guidage en Translation 20-21Document6 pagesTD Guidage en Translation 20-21meryPas encore d'évaluation
- Jerk PDFDocument4 pagesJerk PDFالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- TD de Mecasol.2Document6 pagesTD de Mecasol.2moryammossati92Pas encore d'évaluation
- Résolution Dun Probléme Statique Par Les Torseurs 2 Bac Science DingenieurDocument8 pagesRésolution Dun Probléme Statique Par Les Torseurs 2 Bac Science DingenieurkololoPas encore d'évaluation
- Sec Minesponts 2004 Sic PSIDocument12 pagesSec Minesponts 2004 Sic PSIAlexandre BourrieauPas encore d'évaluation
- DSDocument7 pagesDSAmoussPas encore d'évaluation
- dm21 Ci5 Loc Frein Airbus CorDocument4 pagesdm21 Ci5 Loc Frein Airbus CortytybelfPas encore d'évaluation
- Les Directions Et Trains Roulants Directeurs Des MatérielsDocument25 pagesLes Directions Et Trains Roulants Directeurs Des Matérielsjeanbenoit015100% (3)
- Cours 1Document13 pagesCours 1Jonathan BataillePas encore d'évaluation
- Serie P1 Travail Et Puissance Mécanique WWW - Axloutoth.snDocument5 pagesSerie P1 Travail Et Puissance Mécanique WWW - Axloutoth.snft2292492Pas encore d'évaluation
- Mémoire en Réponse Avis MRAe Parc Photovoltaïque Coulonges-Thouarsais-3Document69 pagesMémoire en Réponse Avis MRAe Parc Photovoltaïque Coulonges-Thouarsais-3JPTWOOPas encore d'évaluation
- Pont Et TransmissionDocument9 pagesPont Et TransmissionEmna Abouda100% (2)
- Axe Instantané de Rotation - WikipédiaDocument19 pagesAxe Instantané de Rotation - WikipédiankolostacyPas encore d'évaluation
- Boite AutomatiqueDocument10 pagesBoite AutomatiqueJoão Dantas50% (2)
- TDDocument5 pagesTDYassir Ez-znafry100% (1)
- Polaires 2Document15 pagesPolaires 2Elias BOYERPas encore d'évaluation
- Torseur Cinématique - WikipédiaDocument18 pagesTorseur Cinématique - Wikipédiagabrielmaheshe039Pas encore d'évaluation
- Astraos 5Document3 pagesAstraos 5jb.dqaPas encore d'évaluation
- Cours Cinmatique MVT Plan EquiprojectivitDocument2 pagesCours Cinmatique MVT Plan EquiprojectivitsallsmartPas encore d'évaluation
- Corrige Sujet Bac Ssi 2018 Nouvelle CaledonieDocument11 pagesCorrige Sujet Bac Ssi 2018 Nouvelle CaledonieThierry BlanquetPas encore d'évaluation
- 051a Etude Sur Les Vibrations D'une HeliceDocument12 pages051a Etude Sur Les Vibrations D'une HeliceSou TibonPas encore d'évaluation
- Polycopie de TD 2013Document70 pagesPolycopie de TD 2013hichamkabel100% (1)
- DM nc2b01 de Mecc81canique de SolideDocument2 pagesDM nc2b01 de Mecc81canique de SolideCreche Le NidPas encore d'évaluation
- TD m3 PolairesDocument8 pagesTD m3 PolairesredaPas encore d'évaluation
- La Dynamique Du VéhiculeDocument5 pagesLa Dynamique Du VéhiculeRIKOPas encore d'évaluation
- Résolution D'un Probléme Statique Par Les TorseursDocument8 pagesRésolution D'un Probléme Statique Par Les TorseursMelkior Jovial Diyani EssoumbaPas encore d'évaluation
- Application 5 Inverseur de MarcheDocument4 pagesApplication 5 Inverseur de Marcheمقاطع فري فايرPas encore d'évaluation
- Homographie: Homographie : transformations en vision par ordinateurD'EverandHomographie: Homographie : transformations en vision par ordinateurPas encore d'évaluation
- Chapitre 3 Gestion Stock en MaintenanceDocument11 pagesChapitre 3 Gestion Stock en MaintenanceAbdellah El Barkany100% (1)
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapePas encore d'évaluation
- Direction Et SuspDocument70 pagesDirection Et SuspBoutahri Mostafa100% (1)
- Direction Et SuspDocument70 pagesDirection Et SuspBoutahri Mostafa100% (1)
- Boite Vitesse PDFDocument40 pagesBoite Vitesse PDFBoutahri MostafaPas encore d'évaluation
- Methodes de Recherche D Emploi 1Document21 pagesMethodes de Recherche D Emploi 1Boutahri MostafaPas encore d'évaluation
- FR Comment Changer Faisceau Dallumage Sur VW Golf III 35 Portes 1h1 Guide de RemplacementDocument9 pagesFR Comment Changer Faisceau Dallumage Sur VW Golf III 35 Portes 1h1 Guide de RemplacementSam SamPas encore d'évaluation
- Contrôle Du Circuit de DémarrageDocument19 pagesContrôle Du Circuit de DémarrageAndriatsirihasinaPas encore d'évaluation
- Abreviation AutomobileDocument14 pagesAbreviation Automobilejohn toretto100% (1)
- Faisceau Pyramidal Dans Le Tronc CérébralDocument49 pagesFaisceau Pyramidal Dans Le Tronc CérébralSirine BelghuithPas encore d'évaluation
- Fiche Technique: Compresseur en Boucle FerméeDocument2 pagesFiche Technique: Compresseur en Boucle FerméefadPas encore d'évaluation
- Memoire Rehabilitation de L Atelier Des Flexibles-3-1Document79 pagesMemoire Rehabilitation de L Atelier Des Flexibles-3-1Koffi AmedendiPas encore d'évaluation
- Rivulis JFR-Brochure Francais EA 20200519 WebDocument6 pagesRivulis JFR-Brochure Francais EA 20200519 WebHhsPas encore d'évaluation
- Application Aux Machines Thermiques PDFDocument11 pagesApplication Aux Machines Thermiques PDFboussaid nejlaPas encore d'évaluation
- AMDEC - Trommel CompletDocument30 pagesAMDEC - Trommel CompletMustapha CarripPas encore d'évaluation
- Tiger LOW Sdelano KLinino FreeDocument15 pagesTiger LOW Sdelano KLinino FreeOscar Javier Pineda AchuryPas encore d'évaluation
- SSP 388 Moteur V8 4.2LDocument40 pagesSSP 388 Moteur V8 4.2LtahiriPas encore d'évaluation
- Chapitre I-محولDocument16 pagesChapitre I-محولAdel AdoulaPas encore d'évaluation
- 06-Cleaning FR PDFDocument12 pages06-Cleaning FR PDFRachid SmailiPas encore d'évaluation
- CATA HYDROSTATIQUES 01 2018 - OptDocument32 pagesCATA HYDROSTATIQUES 01 2018 - OptBaiuliang BaiuliangPas encore d'évaluation
- Buffalo 400x 800035617sp-v05Document7 pagesBuffalo 400x 800035617sp-v05Fabrice SarrazinPas encore d'évaluation
- Questionnaire de FreinageDocument2 pagesQuestionnaire de FreinageŠïmø Lëgêñd100% (4)
- ClasseurDocument3 pagesClasseuraitammar MeeianPas encore d'évaluation
- FICHE TECHNIQUE-Super Ace-3Document2 pagesFICHE TECHNIQUE-Super Ace-3Zakaryae AffariPas encore d'évaluation
- Generalites Et MethodesDocument9 pagesGeneralites Et MethodesTiolaPas encore d'évaluation
- Tarif EXELTEC Rideaux Dair 2016 - BRDocument68 pagesTarif EXELTEC Rideaux Dair 2016 - BRFATIMA ZAHRA MELKOUPas encore d'évaluation
- Curriculum - Vitae CLIFFPRD BibandiaDocument2 pagesCurriculum - Vitae CLIFFPRD BibandiaClivv B1Pas encore d'évaluation
- TransmissionDocument322 pagesTransmissionacisse0795Pas encore d'évaluation
- Renault Document de Reference 2014Document384 pagesRenault Document de Reference 2014aminos85Pas encore d'évaluation
- Exercices GrafcetDocument5 pagesExercices GrafcetHamza AbourifaaPas encore d'évaluation
- Pompes À Carburant Électriques: Récapitulatif Du Produit Pour Une Utilisation UniverselleDocument8 pagesPompes À Carburant Électriques: Récapitulatif Du Produit Pour Une Utilisation UniverselleNomenjanahary AndriherinivoPas encore d'évaluation
- Les Circuits MagnétiquesDocument33 pagesLes Circuits MagnétiquesAnas KertyPas encore d'évaluation
- Nissan Model wf05 PDFDocument7 pagesNissan Model wf05 PDFBekir KarimPas encore d'évaluation