Vous aimerez peut-être aussi
- Contrats et marchés publics de défenseD'EverandContrats et marchés publics de défenseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Usagers:-: L'échange de Données Numériques EntreDocument3 pagesUsagers:-: L'échange de Données Numériques EntreCyrille Max AKEPas encore d'évaluation
- Developing Cost Estimates for Environmental Remediation ProjectsD'EverandDeveloping Cost Estimates for Environmental Remediation ProjectsPas encore d'évaluation
- Rnis DTS2 TDocument65 pagesRnis DTS2 TethosgrPas encore d'évaluation
- Livret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62D'EverandLivret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62Pas encore d'évaluation
- Les Réseaux TETRA-3RPDocument61 pagesLes Réseaux TETRA-3RPAmine BouazPas encore d'évaluation
- Spring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplateD'EverandSpring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplatePas encore d'évaluation
- Les Interfaces GSM Et Leur LocalisationDocument2 pagesLes Interfaces GSM Et Leur LocalisationAbou Iyad ElmharziPas encore d'évaluation
- Réseaux mobiles et satellitaires: Principes, calculs et simulationsD'EverandRéseaux mobiles et satellitaires: Principes, calculs et simulationsPas encore d'évaluation
- Cns - sg3 Iata Wp37.required Communication Performance - RCP AtmDocument7 pagesCns - sg3 Iata Wp37.required Communication Performance - RCP AtmAmr ZouhirPas encore d'évaluation
- Capacité LTEDocument71 pagesCapacité LTEpatrick vibilaPas encore d'évaluation
- MP Ist 062 14Document14 pagesMP Ist 062 14Tiémogo TRAOREPas encore d'évaluation
- Planification Des Reseaux Mobiles de La Quatrieme GenerationDocument21 pagesPlanification Des Reseaux Mobiles de La Quatrieme GenerationAnouar AleyaPas encore d'évaluation
- UMTSDocument16 pagesUMTSAnicet Germain ONDO NTOSSUIPas encore d'évaluation
- PLANDocument8 pagesPLANNarkhiss TaPas encore d'évaluation
- Présentation SignalisationDocument100 pagesPrésentation SignalisationMame Mandione Laye BoPas encore d'évaluation
- La-Technologie WANDocument22 pagesLa-Technologie WANDasilPas encore d'évaluation
- QosDocument8 pagesQosSiddo NajimPas encore d'évaluation
- Institut Des Télécommunications: Description Generale Du Systeme AxeDocument77 pagesInstitut Des Télécommunications: Description Generale Du Systeme AxeOuail Euschi100% (1)
- GSM For Mobile Comm.Document12 pagesGSM For Mobile Comm.karukola_suryakumariPas encore d'évaluation
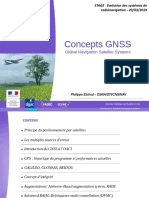
- RNAEV 2019 - Concepts - GNSS v1.1Document53 pagesRNAEV 2019 - Concepts - GNSS v1.1Options TransitPas encore d'évaluation
- Principe Du SDNDocument7 pagesPrincipe Du SDNeweeger1Pas encore d'évaluation
- Comptage Temporaire Du Trafic RoutierDocument76 pagesComptage Temporaire Du Trafic RoutierSouFiane MansouRiPas encore d'évaluation
- These en Telecommunications-Esmt - 20003Document84 pagesThese en Telecommunications-Esmt - 20003MassePas encore d'évaluation
- Design de Transport de Donnees Sur ATMDocument14 pagesDesign de Transport de Donnees Sur ATMRoland KitokoPas encore d'évaluation
- IntroductionDocument4 pagesIntroductionCristy MitchellPas encore d'évaluation
- Transport de Donnes Sur ATMDocument7 pagesTransport de Donnes Sur ATMmass murderer63100% (1)
- Introduction LTE 4GDocument32 pagesIntroduction LTE 4GDieudonné L'avatar100% (1)
- Réseau UMTS Et Ses Évolutions UMTS - HSxPA - 3LTEDocument77 pagesRéseau UMTS Et Ses Évolutions UMTS - HSxPA - 3LTEAbderrazekHmidetPas encore d'évaluation
- Chapitre 1 Généralités Sur Le GSMDocument25 pagesChapitre 1 Généralités Sur Le GSMAbou Iyad Elmharzi100% (4)
- RTA CoursDocument244 pagesRTA CoursAhmed Boumehdi100% (2)
- SIGTRANDocument38 pagesSIGTRANSEPas encore d'évaluation
- TéléconduiteDocument4 pagesTéléconduiteSouley TANKOANOPas encore d'évaluation
- TSF FDocument8 pagesTSF FAmine BougouvitchPas encore d'évaluation
- Rapport Système SCADA-EMSDocument12 pagesRapport Système SCADA-EMSMolka AyechiPas encore d'évaluation
- Chapitre 1Document18 pagesChapitre 1May AmgPas encore d'évaluation
- gsm1.3 MOC MTCDocument23 pagesgsm1.3 MOC MTCdorouxel100% (1)
- Introductionroutage RS2Document20 pagesIntroductionroutage RS2Pagnol YonkeuPas encore d'évaluation
- Cours - Ingénierie Des Réseaux Moboles 3GDocument40 pagesCours - Ingénierie Des Réseaux Moboles 3GHama Mossi Abdoul RazakPas encore d'évaluation
- Cours Cisco CCNA2Document203 pagesCours Cisco CCNA2samireverPas encore d'évaluation
- Scorpion FRDocument0 pageScorpion FRMirak BeddarPas encore d'évaluation
- 214 - 6 Routage Et Protocole - Interconnexion de RéseauxDocument63 pages214 - 6 Routage Et Protocole - Interconnexion de RéseauxAbubakr SidikPas encore d'évaluation
- Exposer ATM 1Document36 pagesExposer ATM 1Ismaïla SowPas encore d'évaluation
- Diameter Roaming EfortDocument7 pagesDiameter Roaming EfortjamalPas encore d'évaluation
- ATMDocument6 pagesATMMinyar JabriPas encore d'évaluation
- Architecture Réseau WimaxDocument19 pagesArchitecture Réseau WimaxMonir Monir67% (3)
- Atoll Forsk DescriptionDocument5 pagesAtoll Forsk DescriptionSiddo Najim67% (3)
- Chapitre 4Introduction aux Réseaux Industriels et au système SCADADocument9 pagesChapitre 4Introduction aux Réseaux Industriels et au système SCADAHemsas OussamaPas encore d'évaluation
- Reseau de CapteurDocument10 pagesReseau de CapteurAlÖù LôüPas encore d'évaluation
- Chapitre 3Document6 pagesChapitre 3SetouliPas encore d'évaluation
- Histoire de l'ATMDocument8 pagesHistoire de l'ATMLAURENT ABEGAPas encore d'évaluation
- civitas_ii_policy_advice_notes_12_traffic_visualisation_control_frDocument12 pagescivitas_ii_policy_advice_notes_12_traffic_visualisation_control_frMario LandryPas encore d'évaluation
- Gestion Du Spectre Et MultiplexageDocument12 pagesGestion Du Spectre Et Multiplexagekotto dimitriPas encore d'évaluation
- Document 2Document6 pagesDocument 2Assane BollyPas encore d'évaluation
- Les Services de La Circulation AerienneDocument54 pagesLes Services de La Circulation AerienneJean KaswaPas encore d'évaluation
- RCSFDocument8 pagesRCSFKaouther CcnaPas encore d'évaluation
- Expose G2 RnisDocument21 pagesExpose G2 RnisNIKIEMA Francklin PowellPas encore d'évaluation
- Cours en Réseau GSM Et GPRSDocument25 pagesCours en Réseau GSM Et GPRSfranckkiemdePas encore d'évaluation
- Rapport de Stage Kachroud Athmane PDFDocument18 pagesRapport de Stage Kachroud Athmane PDFyoucef100% (1)
- Exercices InformatiqueDocument7 pagesExercices Informatiquekhouloud.chgourPas encore d'évaluation
- Javascript IsmailDocument101 pagesJavascript IsmailIsmail Benbya100% (1)
- Cours Réseaux Chap 01Document23 pagesCours Réseaux Chap 01Ndjidama youssoufaPas encore d'évaluation
- CV MardocheeDocument1 pageCV MardocheekoyabePas encore d'évaluation
- Maths GénéDocument17 pagesMaths GénékoyabePas encore d'évaluation
- Chapitre 3 Electromagnetisme 2019 2020Document33 pagesChapitre 3 Electromagnetisme 2019 2020koyabePas encore d'évaluation
- UmlDocument20 pagesUmlhappylady90Pas encore d'évaluation
- Physique Terminale S PDFDocument250 pagesPhysique Terminale S PDFrachid100% (9)
- Nouvelle Fiche Stage Commutation Voix & DonnéesDocument1 pageNouvelle Fiche Stage Commutation Voix & DonnéeskoyabePas encore d'évaluation
- Travail de Groupe 1Document11 pagesTravail de Groupe 1koyabePas encore d'évaluation
- CH MatricesDocument21 pagesCH MatricesSergio Davensky PIERREPas encore d'évaluation
- TIA PortalDocument10 pagesTIA PortalAyoub AyayPas encore d'évaluation
- CM TransmissionDataDocument63 pagesCM TransmissionDataA'chille Arouko LeKaizerPas encore d'évaluation
- COURS DE GENIE LOGICIEL by Pof. YENDE R PDFDocument89 pagesCOURS DE GENIE LOGICIEL by Pof. YENDE R PDFEn Personne AlaeddinePas encore d'évaluation
- TIA PortalDocument10 pagesTIA PortalAyoub AyayPas encore d'évaluation
- Chap 3Document15 pagesChap 3koyabePas encore d'évaluation
- Chap 06 ActexpleffetwahwahcorrigeDocument6 pagesChap 06 ActexpleffetwahwahcorrigekoyabePas encore d'évaluation
- Chap 2Document18 pagesChap 2koyabePas encore d'évaluation
- 6 ConducteursenquilibreDocument16 pages6 ConducteursenquilibrekoyabePas encore d'évaluation
- AutomgenDocument9 pagesAutomgenHani ErrachidPas encore d'évaluation
- TD 03 CorrigeDocument14 pagesTD 03 CorrigerabehPas encore d'évaluation
- AopDocument9 pagesAopNaima LaaroussiPas encore d'évaluation
- AopDocument9 pagesAopNaima LaaroussiPas encore d'évaluation
- Exercice N°0:: État Bouton Appuyé ÉtatDocument36 pagesExercice N°0:: État Bouton Appuyé ÉtatkoyabePas encore d'évaluation
- Corrigés Des Tests N°2: Test N°2 Sujet N°1Document10 pagesCorrigés Des Tests N°2: Test N°2 Sujet N°1koyabePas encore d'évaluation
- GHDocument28 pagesGHAina Hery100% (1)
- 5 DiplelectrostratiqueDocument9 pages5 DiplelectrostratiquekoyabePas encore d'évaluation
- Corrigés Des Tests N°2: Test N°2 Sujet N°1Document10 pagesCorrigés Des Tests N°2: Test N°2 Sujet N°1koyabePas encore d'évaluation
- Flux Électrostatique Théorème de Gauss: Exercice 15 Flux Électrostatique Créé Par Une Charge PonctuelleDocument8 pagesFlux Électrostatique Théorème de Gauss: Exercice 15 Flux Électrostatique Créé Par Une Charge Ponctuellekoyabe100% (1)
- Miac2 CompletDocument544 pagesMiac2 CompletGu La 2005Pas encore d'évaluation
- AIP Restreint 06 Jul 2023Document120 pagesAIP Restreint 06 Jul 2023Chafi HalaimiaPas encore d'évaluation
- Connaissance Aero Cours8Document37 pagesConnaissance Aero Cours8rephoneshop rephoneshopPas encore d'évaluation
- Gpskit K900iper Fra LDDocument2 pagesGpskit K900iper Fra LDsamuelepuggiaPas encore d'évaluation
- Cours N°4 VOR, Radiocompas Et Goniomètre PDFDocument46 pagesCours N°4 VOR, Radiocompas Et Goniomètre PDFnaguib AbdoulrazackPas encore d'évaluation
- Cours Sur Le GPSDocument4 pagesCours Sur Le GPSCamara OumarPas encore d'évaluation
- Physique AppliquéeDocument9 pagesPhysique AppliquéeZubair QuaishPas encore d'évaluation
- Topographie Opérationnelle: Michel BrabantDocument24 pagesTopographie Opérationnelle: Michel Brabantmeissa100% (1)
- Program Transformare Stereo 70-UTMDocument8 pagesProgram Transformare Stereo 70-UTMAntoniuDragneaPas encore d'évaluation
- 3.6 Orientation Astronomique - AFTDocument35 pages3.6 Orientation Astronomique - AFTOriane RouaudPas encore d'évaluation
- Transverse Universelle de MercatorDocument10 pagesTransverse Universelle de Mercatorfiras selmiPas encore d'évaluation
- Travaux Diriges de Mem - RenfoDocument4 pagesTravaux Diriges de Mem - Renfoyao philémon kouassiPas encore d'évaluation
- Le Livre Des FeuxDocument12 pagesLe Livre Des FeuxAntoinePas encore d'évaluation
- Chap08 Mesure Sphere Terrestre2Document2 pagesChap08 Mesure Sphere Terrestre2houdachouikha6Pas encore d'évaluation
- Orthodromie 4Document4 pagesOrthodromie 4Mohcine LaminePas encore d'évaluation
- Phare de Chauveau-Bd Definitif PDFDocument20 pagesPhare de Chauveau-Bd Definitif PDFOlivier BERTRANDPas encore d'évaluation
- Les 4 Points Cardinaux - Recherche GoogleDocument1 pageLes 4 Points Cardinaux - Recherche GooglejijiPas encore d'évaluation
- Memoire Kanazoe EfptpDocument100 pagesMemoire Kanazoe EfptpScribd97Pas encore d'évaluation
- Cours NavigationDocument23 pagesCours NavigationDiatto Cyr100% (1)
- INT1 FR Ed6 2016Document124 pagesINT1 FR Ed6 2016Ahmad AfandiPas encore d'évaluation
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Création d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileD'EverandCréation d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Le plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentD'EverandLe plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentPas encore d'évaluation
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Blockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondeD'EverandBlockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondePas encore d'évaluation
- Créer Son Propre Site Internet Et Son Blog GratuitementD'EverandCréer Son Propre Site Internet Et Son Blog GratuitementÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- La psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsD'EverandLa psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsPas encore d'évaluation
- 101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerD'Everand101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Forex Trading facile à apprendre: Le guide d'introduction au marché des changes et aux stratégies de négociation les plus efficaces dans l'industrie des devises.D'EverandForex Trading facile à apprendre: Le guide d'introduction au marché des changes et aux stratégies de négociation les plus efficaces dans l'industrie des devises.Évaluation : 4 sur 5 étoiles4/5 (1)
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation