Vous aimerez peut-être aussi
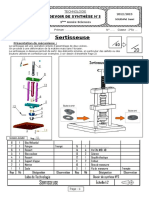
- Devoir de Synthèse N°3 - Technologie Sertisseuse - 2ème Sciences (2014-2015) MR Mighri LotfiDocument6 pagesDevoir de Synthèse N°3 - Technologie Sertisseuse - 2ème Sciences (2014-2015) MR Mighri LotfiInsaf SerroukhPas encore d'évaluation
- Matlab SignauxDocument22 pagesMatlab SignauxFayçal Belkessam100% (1)
- (ModSLCI) (CO) Modelisation Des SLCIDocument28 pages(ModSLCI) (CO) Modelisation Des SLCIboniyaojeaneliePas encore d'évaluation
- Devoir de Synthèse N°3 2009 2010 (Soudani Sami)Document4 pagesDevoir de Synthèse N°3 2009 2010 (Soudani Sami)Med Aymen Bensalem100% (1)
- (AnaSLCI) (CO) Analyse Des Performances Des SLCIDocument28 pages(AnaSLCI) (CO) Analyse Des Performances Des SLCIPatrick Steve SimoPas encore d'évaluation
- TP Nc2b02 Asservissement de La Vitesse Dun Moteur A Courant ContinuuDocument3 pagesTP Nc2b02 Asservissement de La Vitesse Dun Moteur A Courant Continuuangelico josephPas encore d'évaluation
- TP San 1 22 23Document4 pagesTP San 1 22 23Anfel CPas encore d'évaluation
- Devoir de Synthése N3-2AS-2013-FinDocument6 pagesDevoir de Synthése N3-2AS-2013-FinJay Jay MbayomPas encore d'évaluation
- TP1 ZelioDocument4 pagesTP1 ZeliopopmlPas encore d'évaluation
- Machine de Pliage Et de SciageDocument3 pagesMachine de Pliage Et de SciageSsantrino OnirtnassPas encore d'évaluation
- TP1 2 AutomatiqueDocument14 pagesTP1 2 AutomatiqueMOHAMED AKACHARPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie - 2ème SC (2012-2013) MR Neji MohamedDocument5 pagesDevoir de Synthèse N°2 - Technologie - 2ème SC (2012-2013) MR Neji MohamedAdel KmimechPas encore d'évaluation
- TP - Outil de Simulation MATLABDocument17 pagesTP - Outil de Simulation MATLABRaphael RAKOTOARIVELOPas encore d'évaluation
- TP ElecII GM2 PDFDocument21 pagesTP ElecII GM2 PDFyoussef MoujanniPas encore d'évaluation
- TP1 Simulation D'un MCCDocument4 pagesTP1 Simulation D'un MCCRonel valere FeussiPas encore d'évaluation
- Document Réponse TP2 PID - Num 2022 - 2023Document10 pagesDocument Réponse TP2 PID - Num 2022 - 2023Zerrouk AthmanPas encore d'évaluation
- TP 1 Initiation Aux Fonctions LogiquesDocument7 pagesTP 1 Initiation Aux Fonctions LogiquesFerdaws BNasr BSalahPas encore d'évaluation
- CR Auto BNDocument25 pagesCR Auto BNOUTMANE FERNOUCHPas encore d'évaluation
- TP 1 Initiation Aux Fonctions LogiquesDocument7 pagesTP 1 Initiation Aux Fonctions LogiquesFerdaws BNasr BSalahPas encore d'évaluation
- TP 1 Initiation Aux Fonctions LogiquesDocument7 pagesTP 1 Initiation Aux Fonctions LogiquesFerdaws BNasr BSalahPas encore d'évaluation
- TP 1 Initiation Aux Fonctions LogiquesDocument7 pagesTP 1 Initiation Aux Fonctions LogiquesSamroura YessadPas encore d'évaluation
- DP 2Document4 pagesDP 2meriembelhadj2024Pas encore d'évaluation
- Devoir de Synthèse N°1 2010 2011 (Zouhaier Rihane) (Lycee Sidi Zekri)Document3 pagesDevoir de Synthèse N°1 2010 2011 (Zouhaier Rihane) (Lycee Sidi Zekri)Adam BensaidPas encore d'évaluation
- Devoir Entcom EdamDocument4 pagesDevoir Entcom EdamAhmed ChaabenPas encore d'évaluation
- Exam 2020Document7 pagesExam 2020Mamadou Korka KantéPas encore d'évaluation
- TD N°2 Commande Des Systèmes Linéaires Continus M1Document3 pagesTD N°2 Commande Des Systèmes Linéaires Continus M1ArradPas encore d'évaluation
- TD N3 VHDLDocument20 pagesTD N3 VHDLHanane AIT SAIDPas encore d'évaluation
- DosRépo (Élect)Document5 pagesDosRépo (Élect)Nejib JallouliPas encore d'évaluation
- Xdevoir de Contrôle N°1 - 1s Samir11Document16 pagesXdevoir de Contrôle N°1 - 1s Samir11Ssantrino OnirtnassPas encore d'évaluation
- APIDocument14 pagesAPIElmokh LassaadPas encore d'évaluation
- 1 Sujet BE 1 2 3 2022 RegulDocument6 pages1 Sujet BE 1 2 3 2022 RegulBaptiste CapaiPas encore d'évaluation
- Devoir de Contrôle #2 - Electricité - 3ème Technique (2009-2010) Ghanmi NasrDocument7 pagesDevoir de Contrôle #2 - Electricité - 3ème Technique (2009-2010) Ghanmi Nasrmatmatijamel100% (1)
- DS Rle 2017Document4 pagesDS Rle 2017Dorra GuedriPas encore d'évaluation
- TP Fouotsap Et Pesdjock ProfesseurDocument16 pagesTP Fouotsap Et Pesdjock ProfesseurBoris FouotsapPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie SYSTEME Poste de Sertissage Des Boites de Tomate - 2ème Sciences (2011-2012) MR Hazzoug AbdelazizDocument6 pagesDevoir de Synthèse N°1 - Technologie SYSTEME Poste de Sertissage Des Boites de Tomate - 2ème Sciences (2011-2012) MR Hazzoug Abdelazizzoubeir gloulouPas encore d'évaluation
- TP 2 SNLDocument9 pagesTP 2 SNLbendjeddou ammarPas encore d'évaluation
- Les SequenceursDocument6 pagesLes SequenceursRouaissi Ridha100% (1)
- Page13 17Document7 pagesPage13 17Besbes ZiedPas encore d'évaluation
- Devoir Surveille N°1 TCT1Document3 pagesDevoir Surveille N°1 TCT1Jalil AkaabounePas encore d'évaluation
- TP - Grand Paris SudDocument6 pagesTP - Grand Paris Sudhicham.ibrahimiPas encore d'évaluation
- DS2-4ST-2020 ElecDocument4 pagesDS2-4ST-2020 ElecIsmail Ezzine100% (1)
- EXAM2017Document5 pagesEXAM2017Nour ZghalPas encore d'évaluation
- TP 1 Initiation Aux Fonctions LogiquesDocument7 pagesTP 1 Initiation Aux Fonctions LogiquesHana KhemissiPas encore d'évaluation
- TP 3Document2 pagesTP 3Kadri MongiPas encore d'évaluation
- CR TP1 PDFDocument14 pagesCR TP1 PDFazzamPas encore d'évaluation
- R Ve VS: Tp1: Amplificateur Operationel en Mode Comparateur Comparateur À Hystérésis I. But de TPDocument2 pagesR Ve VS: Tp1: Amplificateur Operationel en Mode Comparateur Comparateur À Hystérésis I. But de TPFingroo lipPas encore d'évaluation
- REDRESSEMENTDocument6 pagesREDRESSEMENTAdel ZitouniPas encore d'évaluation
- CI SLCI 2 Suj RobotinoDocument6 pagesCI SLCI 2 Suj RobotinoNadim HafsiPas encore d'évaluation
- TP N°2: Transformée de Laplace Et La Détermination de La Fonction de TransfertDocument3 pagesTP N°2: Transformée de Laplace Et La Détermination de La Fonction de TransfertGhetra hichemPas encore d'évaluation
- TP 3 SNLDocument7 pagesTP 3 SNLbendjeddou ammarPas encore d'évaluation
- Cours 1Document50 pagesCours 1Nissrine RidaPas encore d'évaluation
- DS AutomatiqueDocument3 pagesDS AutomatiqueHaitam AYAZPas encore d'évaluation
- Asservissement NumeriqueDocument15 pagesAsservissement NumeriqueRani JusPas encore d'évaluation
- AP1.2 Binaire Logique ElevesDocument15 pagesAP1.2 Binaire Logique ElevesBerragouba BerragoubaPas encore d'évaluation
- Cahier de Technologie 2AS - v2Document55 pagesCahier de Technologie 2AS - v2Kadri Mongi0% (1)
- Lectronique Umerique: Ravaux RatiquesDocument24 pagesLectronique Umerique: Ravaux Ratiquesعبير نجداويPas encore d'évaluation
- Travaux Pratiques Cicuits ProgrammablesDocument18 pagesTravaux Pratiques Cicuits ProgrammablesNihed HachimiPas encore d'évaluation
- TP De1à19Document204 pagesTP De1à19zora samaPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- SCIENCES Cycle3 8 Electricite FSDocument22 pagesSCIENCES Cycle3 8 Electricite FSAristide DOSSOUPas encore d'évaluation
- Synthese CapteursDocument2 pagesSynthese CapteursIsmail Khelil100% (1)
- s1-1.1 Notion DimpedanceDocument11 pagess1-1.1 Notion DimpedanceMed Mahmoud MohamedPas encore d'évaluation
- POD HD500X Advanced Guide - FrenchDocument119 pagesPOD HD500X Advanced Guide - FrenchCtequilasunPas encore d'évaluation
- Les MicrosDocument23 pagesLes MicrosHumzyPas encore d'évaluation
- Amplificateurs de PuissanceDocument26 pagesAmplificateurs de PuissanceMame Cheikh SARR100% (2)
- Travaux Dirigés Propagation Et Supports de TransmissionDocument6 pagesTravaux Dirigés Propagation Et Supports de TransmissionABDERRAHMANE AOUSSAYPas encore d'évaluation
- Pid NumDocument14 pagesPid NumskooozaPas encore d'évaluation
- Res Fixes RTCDocument147 pagesRes Fixes RTCFathi SmaouiPas encore d'évaluation
- Les Types de Pile À CombustibleDocument5 pagesLes Types de Pile À Combustibleslimane boutarbouchPas encore d'évaluation
- TP Machines Électriques-AlternateurDocument8 pagesTP Machines Électriques-AlternateurIbrahim SendiPas encore d'évaluation
- Harmoniques Et Puissance DéformanteDocument12 pagesHarmoniques Et Puissance DéformanteEmery MougangPas encore d'évaluation
- Chapitre II Etude Des Équipements Utilisés en FH: 1. PréambuleDocument13 pagesChapitre II Etude Des Équipements Utilisés en FH: 1. PréambulearsenebessePas encore d'évaluation
- Correction TDn°1Document6 pagesCorrection TDn°1Zidi NesimPas encore d'évaluation
- Manuel D'installation FH Version 5Document56 pagesManuel D'installation FH Version 5Blaise Jonathan Vessah89% (35)
- TP TNT Terrestre Et Satellite 232 Signal Utile Et Echos BNFHZDocument25 pagesTP TNT Terrestre Et Satellite 232 Signal Utile Et Echos BNFHZsowPas encore d'évaluation
- BS13 FR (Num 1 Rev 0)Document98 pagesBS13 FR (Num 1 Rev 0)Younes SaifiPas encore d'évaluation
- Le Triac en Commutation - Commande Des Relais Statiques - Princ Ipe ÉlectroniqueDocument13 pagesLe Triac en Commutation - Commande Des Relais Statiques - Princ Ipe ÉlectroniqueJiress MuswilPas encore d'évaluation
- VLT 2800Document38 pagesVLT 2800BrahimiPas encore d'évaluation
- Amplificador Peavey KB A 100Document10 pagesAmplificador Peavey KB A 100buscador09Pas encore d'évaluation
- Theoreme GenerauxDocument26 pagesTheoreme GenerauxNouh HamnalPas encore d'évaluation
- Chapitre 3 HACHEUR SERIEDocument30 pagesChapitre 3 HACHEUR SERIEToutou KHATRIPas encore d'évaluation
- SIEMENS Micromaster 420Document186 pagesSIEMENS Micromaster 420Alex RaduPas encore d'évaluation
- Protection de DistanceDocument107 pagesProtection de DistanceruterboyPas encore d'évaluation
- L'amplificateur Opérationnel en Régime Sature (Non Linéaire)Document3 pagesL'amplificateur Opérationnel en Régime Sature (Non Linéaire)Mr YassinPas encore d'évaluation
- CH2Implémentation D'une Commande Numérique en Temps RéelDocument17 pagesCH2Implémentation D'une Commande Numérique en Temps RéelAbdelhafid BourmadaPas encore d'évaluation
- Controle Capteurs FI EEI 18-19Document2 pagesControle Capteurs FI EEI 18-19Sahsah AbdeslamPas encore d'évaluation
- Solutions de Distribution Et de Branchement BTDocument48 pagesSolutions de Distribution Et de Branchement BTJacquin Mbougueng mbouguengPas encore d'évaluation
- CONTRIBUTION A LA COMMANDE TOLERANTE AUX DEFAUTS D'UN SYSTEME A MOTORISATION ASYNCHRONE: "Apport de L'intelligence Artificielle Pour L'aide À La Supervision Et À La Décision "Document121 pagesCONTRIBUTION A LA COMMANDE TOLERANTE AUX DEFAUTS D'UN SYSTEME A MOTORISATION ASYNCHRONE: "Apport de L'intelligence Artificielle Pour L'aide À La Supervision Et À La Décision "SaidDibPas encore d'évaluation
- Electronique Transistors MOSFETDocument12 pagesElectronique Transistors MOSFETإبراهيم الزايدي الكيحلPas encore d'évaluation