Vous aimerez peut-être aussi
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- TP 3 SNLDocument7 pagesTP 3 SNLbendjeddou ammarPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Tp 3 SNL مصححDocument6 pagesTp 3 SNL مصححbendjeddou ammarPas encore d'évaluation
- Le développement de systèmes d'information (Le): Une méthode intégrée à la transformation des processus, 4e éditionD'EverandLe développement de systèmes d'information (Le): Une méthode intégrée à la transformation des processus, 4e éditionPas encore d'évaluation
- TP 5optimisationDocument9 pagesTP 5optimisationAmmar BendjeddouPas encore d'évaluation
- TP02 IdentificationDocument7 pagesTP02 IdentificationYanis DiabloPas encore d'évaluation
- TP Signal 4 AmmarDocument8 pagesTP Signal 4 Ammarbendjeddou ammarPas encore d'évaluation
- TP 2Document4 pagesTP 2Groupe automatique 2Pas encore d'évaluation
- TP Modélisation Et Identificaton 02 - 2021 - 2022Document3 pagesTP Modélisation Et Identificaton 02 - 2021 - 2022raouffatnaciPas encore d'évaluation
- TP1 2 AutomatiqueDocument14 pagesTP1 2 AutomatiqueMOHAMED AKACHARPas encore d'évaluation
- TP Masters Mass Isai MmeDocument14 pagesTP Masters Mass Isai MmemedPas encore d'évaluation
- Chapitre 3 - Type Tableau (Vecteurs Matrices)Document15 pagesChapitre 3 - Type Tableau (Vecteurs Matrices)david iddirPas encore d'évaluation
- FR Tutorialfemm34 PDFDocument12 pagesFR Tutorialfemm34 PDFHanen BerririPas encore d'évaluation
- TP #1: Synthèse Des Circuits Intégrés: Présentation D'un Système EmbarquéDocument2 pagesTP #1: Synthèse Des Circuits Intégrés: Présentation D'un Système EmbarquéAziz SaijiPas encore d'évaluation
- CR TP2 Sabrine&Tarek GI2B G2Document6 pagesCR TP2 Sabrine&Tarek GI2B G2Tarek KlaiPas encore d'évaluation
- (ModSLCI) (CO) Modelisation Des SLCIDocument28 pages(ModSLCI) (CO) Modelisation Des SLCIboniyaojeaneliePas encore d'évaluation
- Examen SujetDocument3 pagesExamen SujetLaraig YoussefPas encore d'évaluation
- Moteur II BEZIA ZahiraDocument16 pagesMoteur II BEZIA ZahiraAyoub BeziaPas encore d'évaluation
- Examens Conception NumériqueDocument45 pagesExamens Conception NumériqueBELKACEMPas encore d'évaluation
- Chapitre 3Document7 pagesChapitre 3israalaya167Pas encore d'évaluation
- TD 2021Document4 pagesTD 2021elhaoudar.nassima100% (1)
- TP Sal MatlabDocument7 pagesTP Sal MatlabSaif SA100% (2)
- Compte Rendu tp1 Identification Des Systèmes Dynamiques MatlabSimulinkDocument14 pagesCompte Rendu tp1 Identification Des Systèmes Dynamiques MatlabSimulinkabdelaziz.ouhtit-etuPas encore d'évaluation
- Travaux Pratiques2Document7 pagesTravaux Pratiques2Tarek KlaiPas encore d'évaluation
- Projet 6 Pondule InverséDocument23 pagesProjet 6 Pondule InverséTECH NEWSPas encore d'évaluation
- TP 1 SNLDocument8 pagesTP 1 SNLbendjeddou ammarPas encore d'évaluation
- Cours 1Document50 pagesCours 1Nissrine RidaPas encore d'évaluation
- M1 Com Modélisation Identification Systemes ElectriquesDocument97 pagesM1 Com Modélisation Identification Systemes ElectriquesRiadh Bachrouch100% (1)
- Chapitre 3Document34 pagesChapitre 3ZA CBPas encore d'évaluation
- Asservissement 2Document10 pagesAsservissement 2Sofiane MehadjiPas encore d'évaluation
- TD 1 Gestion Industrielle 20202021Document2 pagesTD 1 Gestion Industrielle 20202021Yassine ElabdiPas encore d'évaluation
- 2-Les Graphiques 2D Et 3D - été - 2021Document15 pages2-Les Graphiques 2D Et 3D - été - 2021sam NaelPas encore d'évaluation
- TD - 2 PDFDocument13 pagesTD - 2 PDFMed Amine Talhaoui100% (1)
- Technique de GestionDocument23 pagesTechnique de GestionDidier SanonPas encore d'évaluation
- TP Fouotsap Et Pesdjock ProfesseurDocument16 pagesTP Fouotsap Et Pesdjock ProfesseurBoris FouotsapPas encore d'évaluation
- TP Réseau 33Document17 pagesTP Réseau 33Bouaiss AymenPas encore d'évaluation
- Cours 05 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesCours 05 - Lois Entrée-Sortie en Position Et en VitessemouradkadiriPas encore d'évaluation
- 3 - 1modélisation Systèmes Électromécaniques E PDFDocument19 pages3 - 1modélisation Systèmes Électromécaniques E PDFrajaa latifiPas encore d'évaluation
- Soft Computing and Electrical EngineeringDocument11 pagesSoft Computing and Electrical EngineeringMadeleine MalembouetPas encore d'évaluation
- TP-3 - Station TriDocument13 pagesTP-3 - Station TriRim Ben RziguePas encore d'évaluation
- Modélisation Et Régulation - Trois ApplicationsDocument0 pageModélisation Et Régulation - Trois ApplicationslabfaoPas encore d'évaluation
- Analyse Numerique Evolution Gabriel Turinici 20210323Document54 pagesAnalyse Numerique Evolution Gabriel Turinici 20210323Dada BabaPas encore d'évaluation
- Automatisme TLE MVT Tri 1Document8 pagesAutomatisme TLE MVT Tri 1Kevin Ipoumb100% (5)
- Examen MEF 2008 PDFDocument5 pagesExamen MEF 2008 PDFMohammed Mammar KouadriPas encore d'évaluation
- RAPPORTTP1 MergedDocument30 pagesRAPPORTTP1 MergedLamya BouladassePas encore d'évaluation
- PolyDocument69 pagesPolyMy WorkPas encore d'évaluation
- Final Tp1 MatlabDocument23 pagesFinal Tp1 MatlabSAN RAKSAPas encore d'évaluation
- Matlab SignauxDocument22 pagesMatlab SignauxFayçal Belkessam100% (1)
- Contrôle Systèmes Mécatroniques Février 2022Document2 pagesContrôle Systèmes Mécatroniques Février 2022ElnBEKKARYPas encore d'évaluation
- Chapitre 4 CourDocument22 pagesChapitre 4 Courbn000010Pas encore d'évaluation
- Calcul Des Contraintes Dans Un Profile MetalliqueDocument16 pagesCalcul Des Contraintes Dans Un Profile MetalliqueNdéné NDIAYE100% (1)
- TP ProjetDocument25 pagesTP ProjetMayna LamemPas encore d'évaluation
- LET62 Regulation Industrielle Chapitre 4Document4 pagesLET62 Regulation Industrielle Chapitre 4adnanPas encore d'évaluation
- Cours Cotation FonctionnelleDocument5 pagesCours Cotation FonctionnelleRedouane KouddanePas encore d'évaluation
- 314 PDFDocument5 pages314 PDFSaidDibPas encore d'évaluation
- TP2: Initiation À Matlab: Figure 1: Réponse Indicielle Du SystèmeDocument6 pagesTP2: Initiation À Matlab: Figure 1: Réponse Indicielle Du SystèmeHamza BechatPas encore d'évaluation
- Outils de Représentation en Phase D'avant Projet: 1-Objectifs de La SéquenceDocument5 pagesOutils de Représentation en Phase D'avant Projet: 1-Objectifs de La SéquenceZakaria WasfiPas encore d'évaluation
- Notions de Systemes Asservis PDFDocument80 pagesNotions de Systemes Asservis PDFSiéJustinDembelePas encore d'évaluation
- Outil SPTOOLDocument4 pagesOutil SPTOOLAdil Abouelhassan100% (1)
- Examen 2020 M1 Télécom CorrectionDocument1 pageExamen 2020 M1 Télécom Correctionbendjeddou ammarPas encore d'évaluation
- Ilovepdf MergedDocument11 pagesIlovepdf Mergedbendjeddou ammarPas encore d'évaluation
- TP 4 ElnDocument8 pagesTP 4 Elnbendjeddou ammarPas encore d'évaluation
- Cours Systemes À Evenements DiscretsDocument44 pagesCours Systemes À Evenements Discretsbendjeddou ammarPas encore d'évaluation
- TP 5 ElnDocument8 pagesTP 5 Elnbendjeddou ammarPas encore d'évaluation
- TP 2elnDocument7 pagesTP 2elnbendjeddou ammarPas encore d'évaluation
- Examen 2018 M1 Télécom CorrectionDocument1 pageExamen 2018 M1 Télécom Correctionbendjeddou ammarPas encore d'évaluation
- Rattrapage 2017M1 Télécom Correction1Document1 pageRattrapage 2017M1 Télécom Correction1Toufik YemniPas encore d'évaluation
- TP 4 ElnDocument8 pagesTP 4 Elnbendjeddou ammarPas encore d'évaluation
- CorrigetestDocument1 pageCorrigetestbendjeddou ammarPas encore d'évaluation
- Examen 2021 M1 Télécom CorrDocument1 pageExamen 2021 M1 Télécom Corrbendjeddou ammarPas encore d'évaluation
- TP 5 ElnDocument8 pagesTP 5 Elnbendjeddou ammarPas encore d'évaluation
- Controle Corrigé Type uPuC 2021-2022Document6 pagesControle Corrigé Type uPuC 2021-2022bendjeddou ammarPas encore d'évaluation
- Corr Rat S2 Bioinf 2022Document1 pageCorr Rat S2 Bioinf 2022bendjeddou ammarPas encore d'évaluation
- CorrigetestDocument1 pageCorrigetestbendjeddou ammarPas encore d'évaluation
- Optimisation Non Linéaire Sous ContraintesDocument30 pagesOptimisation Non Linéaire Sous Contraintesbendjeddou ammar100% (1)
- Corr Rat S2 Bioinf 2022Document1 pageCorr Rat S2 Bioinf 2022bendjeddou ammarPas encore d'évaluation
- Corectionexamen ELPDocument2 pagesCorectionexamen ELPbendjeddou ammarPas encore d'évaluation
- API TD L3AutoDocument38 pagesAPI TD L3Autobendjeddou ammarPas encore d'évaluation
- API Student3L AutoDocument18 pagesAPI Student3L Automimi mimiPas encore d'évaluation
- TD 3Document2 pagesTD 3bendjeddou ammarPas encore d'évaluation
- 1 - Cours Statistique DescriptiveDocument25 pages1 - Cours Statistique Descriptivebendjeddou ammarPas encore d'évaluation
- 1-TravauxDirégés ELPDocument3 pages1-TravauxDirégés ELPbendjeddou ammarPas encore d'évaluation
- CDocument27 pagesCnadirPas encore d'évaluation
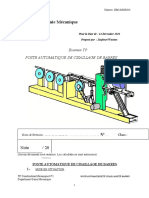
- Poste Automatique de Cisaillage de BarresDocument10 pagesPoste Automatique de Cisaillage de Barresوسيم زعفوريPas encore d'évaluation
- CR 1Document36 pagesCR 1Hajar TouilPas encore d'évaluation
- P2 Dã©senfumageDocument14 pagesP2 Dã©senfumageWassim DjennanePas encore d'évaluation
- Projet 3Document31 pagesProjet 3Mohamed SalamaPas encore d'évaluation
- Identif 4Document32 pagesIdentif 4Amina BELABIDPas encore d'évaluation
- Cours Automatique Part #01Document23 pagesCours Automatique Part #01Jeremie Ivann NGOYEPas encore d'évaluation
- 30752Document29 pages30752Louis PunguPas encore d'évaluation
- M Systemes Asservis Numeriques TD3Document66 pagesM Systemes Asservis Numeriques TD3MENANI ZineddinePas encore d'évaluation
- Majister.2005 KH - Imarazene90 PDFDocument111 pagesMajister.2005 KH - Imarazene90 PDFAsm MaPas encore d'évaluation
- Ghita Edani 3Document1 pageGhita Edani 3Ghita Eddani100% (1)
- Asservissement Et Regulation PDFDocument15 pagesAsservissement Et Regulation PDFphyPas encore d'évaluation
- Polycopie - Sebbagh - Commande Avancée PDFDocument48 pagesPolycopie - Sebbagh - Commande Avancée PDFamine juventusPas encore d'évaluation
- Cours SAMP 7 Discretisation CorrecteurDocument5 pagesCours SAMP 7 Discretisation CorrecteurAbdelhadi AZPas encore d'évaluation
- Autotriax2 Software DB 23.09.14 FRDocument4 pagesAutotriax2 Software DB 23.09.14 FRzossie davidPas encore d'évaluation
- TP2 PidDocument7 pagesTP2 Pidسليم ودادي100% (1)
- Licence ELT-2017-TD Régulation-BF-finalDocument30 pagesLicence ELT-2017-TD Régulation-BF-finalamine milanoPas encore d'évaluation
- S 7260 - Simulation Et CAO en Automatique Et MécatroniqueDocument15 pagesS 7260 - Simulation Et CAO en Automatique Et MécatroniqueAxelPas encore d'évaluation
- 3ème Année, Filière: Biomédicale Module: Système Asservi Linéaire Continu Enseignante: Chaouche.ADocument3 pages3ème Année, Filière: Biomédicale Module: Système Asservi Linéaire Continu Enseignante: Chaouche.AalimaPas encore d'évaluation
- Initiation À MATLAB: 1. Généralités 1.1. Accès À MatlabDocument14 pagesInitiation À MATLAB: 1. Généralités 1.1. Accès À MatlabIguejdi LahcenPas encore d'évaluation
- Commande Des Systèmes Linéaires V0.3 Djamel OUNNASDocument98 pagesCommande Des Systèmes Linéaires V0.3 Djamel OUNNASkeskes nourPas encore d'évaluation
- Radionavigation Ed11 Lpbugeat - OriginalDocument10 pagesRadionavigation Ed11 Lpbugeat - OriginalNaguibPas encore d'évaluation
- Documentation Pack Bi-Temperature 891706Document8 pagesDocumentation Pack Bi-Temperature 891706JulienGhuisolandPas encore d'évaluation
- VFR Area Chart-1Document1 pageVFR Area Chart-1Paulo AguiarPas encore d'évaluation
- Cours - Instrumenation Industrielle - L3 - Gi - S2 - 2020Document30 pagesCours - Instrumenation Industrielle - L3 - Gi - S2 - 2020Thê ĒxęptïonPas encore d'évaluation
- Equipement de Lhabitât Promotion 2019 PDFDocument8 pagesEquipement de Lhabitât Promotion 2019 PDFZaidi FodilPas encore d'évaluation
- 1 Systemes Asservis Lpaii2021Document11 pages1 Systemes Asservis Lpaii2021Boukari Abdoulaye IdrissaPas encore d'évaluation
- Projet Fin D'étudesDocument62 pagesProjet Fin D'étudesmustapha oukssouPas encore d'évaluation
- Apsad r7 Detection Automatique D'incendie - Aleph ExpertsDocument1 pageApsad r7 Detection Automatique D'incendie - Aleph Expertssadok1706Pas encore d'évaluation
- Transf Laplace FN TransfertDocument33 pagesTransf Laplace FN TransfertAicha B'mhPas encore d'évaluation
- Rc3a9vision Automatique Des Systc3a8mes Mc3a9caniques - Sc3a9ance 4Document29 pagesRc3a9vision Automatique Des Systc3a8mes Mc3a9caniques - Sc3a9ance 4Idoumou AbdemouPas encore d'évaluation
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Scrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!D'EverandScrum - Le Guide Ultime des Méthodes Agiles Essentielles de Scrum!Pas encore d'évaluation
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- Guide complet de la Numérologie: Édition 30e anniversaireD'EverandGuide complet de la Numérologie: Édition 30e anniversaireÉvaluation : 4 sur 5 étoiles4/5 (1)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation