Vous aimerez peut-être aussi
- Trois générations de cordonniers à Saint-Jean-Port-JoliD'EverandTrois générations de cordonniers à Saint-Jean-Port-JoliPas encore d'évaluation
- 19 Pilote AutomatiqueDocument8 pages19 Pilote AutomatiqueAbdoulrazack NaguibPas encore d'évaluation
- 13 Installation Des MoteursDocument18 pages13 Installation Des MoteursAbdoulrazack NaguibPas encore d'évaluation
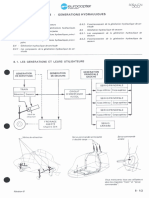
- 08 Generations HydrauliquesDocument16 pages08 Generations HydrauliquesAbdoulrazack NaguibPas encore d'évaluation
- Couleur: III CompattbillteDocument23 pagesCouleur: III CompattbillteRobenson David HervilPas encore d'évaluation
- Aero 11Document16 pagesAero 11sumaleePas encore d'évaluation
- DOSSIER PRELIMINAIRE REV. 0 - 2614615Document168 pagesDOSSIER PRELIMINAIRE REV. 0 - 2614615abdellatif.driouech13Pas encore d'évaluation
- Plan de L'accouchementDocument3 pagesPlan de L'accouchementMichele Ba'anaPas encore d'évaluation
- Réussir L'approche Processus, Stéphane Mathieu, Collection A SavoirDocument28 pagesRéussir L'approche Processus, Stéphane Mathieu, Collection A SavoirThefreePas encore d'évaluation
- Journal-Des-8 1925-T1 No025a037Document82 pagesJournal-Des-8 1925-T1 No025a037Olivier ErnstPas encore d'évaluation
- Cap 01Document12 pagesCap 01Ldm Orthez Mei MolièrePas encore d'évaluation
- Remarque Préliminaire:: Commande Du Plan Horizontal D'Un Empennage D'AvionDocument8 pagesRemarque Préliminaire:: Commande Du Plan Horizontal D'Un Empennage D'AvionYassine OuakkiPas encore d'évaluation
- Fordson Dexta Section3 Et 4Document107 pagesFordson Dexta Section3 Et 4charlesdemoulin456789Pas encore d'évaluation
- Lada Niva Revue Tecnique Manual FRDocument103 pagesLada Niva Revue Tecnique Manual FRabdallah harthPas encore d'évaluation
- 50 Devinettes Pour Bien Raisonner 7-9 Ans (Retz)Document47 pages50 Devinettes Pour Bien Raisonner 7-9 Ans (Retz)brachel100% (4)
- R 731 PDFDocument8 pagesR 731 PDFKhaleel KhanPas encore d'évaluation
- Carta Solicitud ParqDocument1 pageCarta Solicitud ParqEngells CuevasPas encore d'évaluation
- istisbl5BTELGT-1 0Document64 pagesistisbl5BTELGT-1 0Josyto killsPas encore d'évaluation
- Controle Evaporation Cristallisation 2017Document5 pagesControle Evaporation Cristallisation 2017Abaghough BrahimPas encore d'évaluation
- ANALYSE DE LA CONSOMMATION DE CABBURANT DES CHALUTIERS DE PECHE DEMERSALE COTIERE AU SENEGdiL. CONSEQUENCES SUR LA RENTABILITE DES ARMEMENTS ET LA GESTION DE LA PECHERIEDocument48 pagesANALYSE DE LA CONSOMMATION DE CABBURANT DES CHALUTIERS DE PECHE DEMERSALE COTIERE AU SENEGdiL. CONSEQUENCES SUR LA RENTABILITE DES ARMEMENTS ET LA GESTION DE LA PECHERIEOlivier BakouPas encore d'évaluation
- TP DebitmetreDocument14 pagesTP DebitmetrefloredaPas encore d'évaluation
- Astreinte PDFDocument2 pagesAstreinte PDFRochdi MadiPas encore d'évaluation
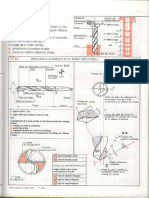
- Perçage PDFDocument9 pagesPerçage PDFAli Ben RomdhanePas encore d'évaluation
- 04 Rotor PrincipalDocument8 pages04 Rotor PrincipalAbdoulrazack NaguibPas encore d'évaluation
- Manuel Moteur 505 TIDocument48 pagesManuel Moteur 505 TIphil75m100% (1)
- Om EagDocument1 pageOm EagLoHebPas encore d'évaluation
- 15 Chauffage - VentilationDocument4 pages15 Chauffage - VentilationAbdoulrazack NaguibPas encore d'évaluation
- 1 Hydraulique PDFDocument92 pages1 Hydraulique PDFwtn2013100% (1)
- Métré Des Routes Batiment JouichatDocument64 pagesMétré Des Routes Batiment Jouichatfaress12106194% (17)
- SCH AME7G 1680MADocument57 pagesSCH AME7G 1680MAridel36100% (1)
- Ford Son Dext A Manuel 57971335560169Document261 pagesFord Son Dext A Manuel 57971335560169mototech5777Pas encore d'évaluation
- Hymne A La Beaute Du MondeDocument2 pagesHymne A La Beaute Du MondeCatherine JolyPas encore d'évaluation
- Hymne À La Beauté Du MondeDocument2 pagesHymne À La Beauté Du Mondezanne blo100% (2)
- NFP 01 012Document22 pagesNFP 01 012LESAGEPas encore d'évaluation
- CB750 Cap 10Document5 pagesCB750 Cap 10medidas012Pas encore d'évaluation
- Olympus OM40 Program Camera Owner's ManualDocument84 pagesOlympus OM40 Program Camera Owner's ManuallegrandewPas encore d'évaluation
- CB750 Cap 05Document8 pagesCB750 Cap 05medidas012Pas encore d'évaluation
- ORONA MP900 Notice de Montage HY 2Document6 pagesORONA MP900 Notice de Montage HY 2John KeatsPas encore d'évaluation
- Chap ActionneurDocument13 pagesChap ActionneurDuboisPas encore d'évaluation
- Etablissements de Schemas en ElectrotechniqueDocument28 pagesEtablissements de Schemas en ElectrotechniqueHyacinthe KOSSIPas encore d'évaluation
- 3 L G Proc Rattra Instrumentation Et CapteurDocument4 pages3 L G Proc Rattra Instrumentation Et CapteurghadaPas encore d'évaluation
- Stabilite Ouvrages Dossier 6Document75 pagesStabilite Ouvrages Dossier 6Ahmed El EuchiPas encore d'évaluation
- Compresseurs Insonriss Nouvelle DocumentationDocument6 pagesCompresseurs Insonriss Nouvelle DocumentationSofian Amara100% (1)
- LP200Document2 pagesLP200mohamed talhaPas encore d'évaluation
- Pfe GM 0081Document101 pagesPfe GM 0081محمد محمدPas encore d'évaluation
- Manuel Crouzet ValenceDocument31 pagesManuel Crouzet ValenceJean-Michel TRUCOPas encore d'évaluation
- Détermination Des Dimensions Caractéristiques D'un Réservoir D'air Sur Une Installation ÉlévatoireDocument12 pagesDétermination Des Dimensions Caractéristiques D'un Réservoir D'air Sur Une Installation ÉlévatoireEliePas encore d'évaluation
- Fiets Toerenteller (Electronique Pratique 67 - Janvier 1984)Document7 pagesFiets Toerenteller (Electronique Pratique 67 - Janvier 1984)Peeters GuyPas encore d'évaluation
- Voyage en ElectriciteDocument1 pageVoyage en ElectriciteplaitilPas encore d'évaluation
- 2130 PDFDocument10 pages2130 PDFSidahmed MilPas encore d'évaluation
- 10 Exercices Courrigés Moteur AsynchroneDocument22 pages10 Exercices Courrigés Moteur AsynchronepolioPas encore d'évaluation
- 4073529Document148 pages4073529Nouhaila RadadiPas encore d'évaluation
- Miniorga de Lumini IPRS 8202Document4 pagesMiniorga de Lumini IPRS 8202Emanuel Caragea100% (1)
- DeclarationDocument3 pagesDeclarationsansanhien520Pas encore d'évaluation
- Action NeurDocument8 pagesAction NeurBenoit J. AyoungPas encore d'évaluation
- Intro Enp PDFDocument56 pagesIntro Enp PDFMustapha BeziouiPas encore d'évaluation
- Captura de Tela 2024-01-26 À(s) 17.14.26Document1 pageCaptura de Tela 2024-01-26 À(s) 17.14.26Daniel MelloPas encore d'évaluation
- PiloteDocument13 pagesPiloteAbdennacer HttPas encore d'évaluation
- Plateau Cyclique (Aéronautique) - WikipédiaDocument15 pagesPlateau Cyclique (Aéronautique) - WikipédiaAbdoulrazack NaguibPas encore d'évaluation
- M Aut - Inf.in 2021 05Document74 pagesM Aut - Inf.in 2021 05Abdoulrazack NaguibPas encore d'évaluation
- Lhélico Comment Ca MarcheDocument27 pagesLhélico Comment Ca MarcheAbdoulrazack NaguibPas encore d'évaluation
- Ecole PPL H 2020Document11 pagesEcole PPL H 2020Abdoulrazack NaguibPas encore d'évaluation
- 12 Generations ElectriquesDocument32 pages12 Generations ElectriquesAbdoulrazack NaguibPas encore d'évaluation
- 18 InstrumentDocument8 pages18 InstrumentAbdoulrazack NaguibPas encore d'évaluation
- Cours SM en Ligne-ConvertiDocument72 pagesCours SM en Ligne-ConvertiAnfel CPas encore d'évaluation
- MOUILLOUR Marceau-ACDocument1 pageMOUILLOUR Marceau-ACouiPas encore d'évaluation
- Defi3 Mediation U6Document14 pagesDefi3 Mediation U6SmithPas encore d'évaluation
- Chapitre IVDocument7 pagesChapitre IVincocc nnuuPas encore d'évaluation
- Machine A Courant ContinuDocument13 pagesMachine A Courant ContinuFrancois PerraisPas encore d'évaluation
- Theorie Des EnsemblesDocument10 pagesTheorie Des EnsemblesKhadija Ben MiledPas encore d'évaluation
- Informatique - Cours de XML - 124 Slides (Jacques Le Maitre) (Universite de Toulon)Document124 pagesInformatique - Cours de XML - 124 Slides (Jacques Le Maitre) (Universite de Toulon)bec souhilaPas encore d'évaluation
- Local Media4349196961818630753Document1 pageLocal Media4349196961818630753Criminel TarsePas encore d'évaluation
- Boucif Smail PDFDocument128 pagesBoucif Smail PDFTayeb GherbiPas encore d'évaluation
- Fiche TD N°1 Et 2 Prepa Ing1Document4 pagesFiche TD N°1 Et 2 Prepa Ing1dislapufePas encore d'évaluation
- Systemes Embarques ConnectesDocument18 pagesSystemes Embarques ConnectesAlaa SmetiPas encore d'évaluation
- Guide LPKF 1 1Document7 pagesGuide LPKF 1 1abdo tmPas encore d'évaluation
- AOP TA (1)Document9 pagesAOP TA (1)El Hasnaoui YsfPas encore d'évaluation
- Bulletin 021 07Document3 pagesBulletin 021 07Walid NessabPas encore d'évaluation
- PRESENTATION DE L'ENVIRONNEMENT WINDOWS (Enregistrement Automatique)Document25 pagesPRESENTATION DE L'ENVIRONNEMENT WINDOWS (Enregistrement Automatique)traore falyPas encore d'évaluation
- Business Plan MfruitierDocument24 pagesBusiness Plan Mfruitierahmed hamza khabouzePas encore d'évaluation
- CH 4. Essais MecaniquesDocument9 pagesCH 4. Essais MecaniquesSimo Magri100% (2)
- R7 - Armare Pardoseli Extras - 7 PDFDocument1 pageR7 - Armare Pardoseli Extras - 7 PDFCristi RanjaPas encore d'évaluation
- CCTG OneeDocument5 pagesCCTG OneeLgtp FaxPas encore d'évaluation
- Diplômes Et FormationsDocument1 pageDiplômes Et FormationsmohamedPas encore d'évaluation
- Dahmane MouradDocument152 pagesDahmane Mouradbright.bandjePas encore d'évaluation
- Polycopie TP GE 2023Document51 pagesPolycopie TP GE 2023mariam.ouaaabedPas encore d'évaluation
- Republique Du Benin: Demande de Cotation (DC) Référence: F - DG - 73044Document21 pagesRepublique Du Benin: Demande de Cotation (DC) Référence: F - DG - 73044Valerys JouoguepPas encore d'évaluation
- Organigramme AIFE Dec 2023Document1 pageOrganigramme AIFE Dec 2023Adam ArbyPas encore d'évaluation
- Examencours 2ST Math5Document12 pagesExamencours 2ST Math5Denilson JosemirPas encore d'évaluation
- Pistolet de Massage Musculaire, Cotsoco Massage GuDocument2 pagesPistolet de Massage Musculaire, Cotsoco Massage GuorelcreppyPas encore d'évaluation
- Informatique Et Societe QuebecDocument9 pagesInformatique Et Societe QuebecKalinatsiPas encore d'évaluation
- Presentation EGFIDocument33 pagesPresentation EGFIbelkakarim98Pas encore d'évaluation
- FeuilletageDocument28 pagesFeuilletageKarim AlamiPas encore d'évaluation
- Details Et Points Singuliers MenuiseriesDocument103 pagesDetails Et Points Singuliers MenuiseriesZOGO LucPas encore d'évaluation
- Chevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesD'EverandChevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesPas encore d'évaluation
- Les Êtres Vivants Dépendent De La Mécanique QuantiqueD'EverandLes Êtres Vivants Dépendent De La Mécanique QuantiquePas encore d'évaluation