Vous aimerez peut-être aussi
- Corrige TD Electrostatique Locale PDFDocument15 pagesCorrige TD Electrostatique Locale PDFMohamed Es-sedratyPas encore d'évaluation
- DM9 CorrDocument9 pagesDM9 CorrVert ImmobPas encore d'évaluation
- CORR EXA SN 2014 - WWW - Etude Generale - ComDocument14 pagesCORR EXA SN 2014 - WWW - Etude Generale - ComMoulham KhalidPas encore d'évaluation
- CTRL PropositionfDocument2 pagesCTRL PropositionfboulaichPas encore d'évaluation
- E Ph2psi2018Document7 pagesE Ph2psi2018ahmadPas encore d'évaluation
- TD3 Phy2023Document2 pagesTD3 Phy2023CedricPas encore d'évaluation
- Dernière Partie de CoursDocument7 pagesDernière Partie de CoursIlham KinichPas encore d'évaluation
- EFS Physique1 2021 CompletDocument2 pagesEFS Physique1 2021 Completasmaa saadPas encore d'évaluation
- Robot TribarDocument2 pagesRobot TribarPixel Stuff0% (1)
- Em1 Corr1Document7 pagesEm1 Corr1Marwan BouhdidiPas encore d'évaluation
- Epreuve Blanche MecaDocument2 pagesEpreuve Blanche MecaIsaacar Moye la SouzaPas encore d'évaluation
- Exam Smp4 SN 2012Document2 pagesExam Smp4 SN 2012Mahfoud Zaki100% (1)
- TD CinemaDocument3 pagesTD Cinemamoise moyePas encore d'évaluation
- TD Champ de VecteursDocument3 pagesTD Champ de VecteursJean pierre AglagoPas encore d'évaluation
- Electro3 Ondes Planes ÉlectromagnétiquesDocument20 pagesElectro3 Ondes Planes ÉlectromagnétiquesAhmad CisséPas encore d'évaluation
- Devoir n01 AU 2015-2016Document2 pagesDevoir n01 AU 2015-2016Geeks ClubPas encore d'évaluation
- ExerciceDocument2 pagesExerciceMustapha ZakiPas encore d'évaluation
- 2016-École Polytechnique-Physique Et SI-MP-enonceDocument11 pages2016-École Polytechnique-Physique Et SI-MP-enoncer_berthetPas encore d'évaluation
- OEB3 PlasmaDocument2 pagesOEB3 PlasmaVictor B.Pas encore d'évaluation
- Travaux Dirig ES: Exercice 1Document2 pagesTravaux Dirig ES: Exercice 1Ÿøüs SëfPas encore d'évaluation
- TD09 contraindreLaVitesseOuLAccelerationDUnSolideDocument2 pagesTD09 contraindreLaVitesseOuLAccelerationDUnSolideNavreePas encore d'évaluation
- Cours de DiffractionDocument13 pagesCours de DiffractionmokhtarPas encore d'évaluation
- Problème 2 - CorrigéDocument6 pagesProblème 2 - CorrigémissmaymounaPas encore d'évaluation
- Cours313 1cDocument53 pagesCours313 1cAbdelmoumen kaabalPas encore d'évaluation
- (Cin) (TD) Souris D OrdinateurDocument2 pages(Cin) (TD) Souris D OrdinateurElbatouri Badr EddinePas encore d'évaluation
- Réseau (De Diffraction) ÉcheletteDocument3 pagesRéseau (De Diffraction) Écheletteraja dhiefPas encore d'évaluation
- DS4bis eDocument5 pagesDS4bis einimgharPas encore d'évaluation
- 02 Bases Equations Maxwell PDFDocument5 pages02 Bases Equations Maxwell PDFboucharebPas encore d'évaluation
- CNC MP 2013 Physique 1 CorrigeDocument12 pagesCNC MP 2013 Physique 1 CorrigeImad NouniPas encore d'évaluation
- 07 Torseurs TD CorDocument3 pages07 Torseurs TD Corboukottaya borhene100% (1)
- Rattrapage 2002-2003Document8 pagesRattrapage 2002-2003Gumball 3303Pas encore d'évaluation
- Chapitre 2 ElectrostatiqueDocument5 pagesChapitre 2 Electrostatiqueyassine safraouiPas encore d'évaluation
- TD3 CorrigeDocument7 pagesTD3 CorrigeMbm SidePas encore d'évaluation
- CorrigeTD2 2Document22 pagesCorrigeTD2 2Music LyricsPas encore d'évaluation
- Analyse VectorielleDocument13 pagesAnalyse VectorielleAbdelfatah MerhoulPas encore d'évaluation
- Aix Marseille C Juin 1984Document3 pagesAix Marseille C Juin 1984warriork1234Pas encore d'évaluation
- DS1 19 20Document2 pagesDS1 19 20Hasnae MoulimPas encore d'évaluation
- CNC 1994 MP Maths 1 CorrigeDocument7 pagesCNC 1994 MP Maths 1 Corrigefbaraket48Pas encore d'évaluation
- Milieu XDocument6 pagesMilieu XAbdennacer kahlaouiPas encore d'évaluation
- LP203 2007 CC CorrectionDocument1 pageLP203 2007 CC Correctionney-zenPas encore d'évaluation
- Travaux 08Document7 pagesTravaux 08comlafontPas encore d'évaluation
- VecteursDocument1 pageVecteursJulien SeguretPas encore d'évaluation
- TD Ue MP-CP L1 Ufhb 22-23Document4 pagesTD Ue MP-CP L1 Ufhb 22-23FULGENCE DIBIPas encore d'évaluation
- Solution Serie03Document8 pagesSolution Serie03alicecullend7Pas encore d'évaluation
- Les Quatre Coccinelles Relu LafondDocument5 pagesLes Quatre Coccinelles Relu LafondRania Del ReyPas encore d'évaluation
- Exo M閏anique Du PointDocument4 pagesExo M閏anique Du PointLoundou ortegaPas encore d'évaluation
- Exercice Son Des em VideDocument4 pagesExercice Son Des em VideReda El KsisPas encore d'évaluation
- Angles Oriente Et TrigonometrieDocument5 pagesAngles Oriente Et TrigonometriememtolombernaPas encore d'évaluation
- Chapitre3 1erOrdeRetardDocument13 pagesChapitre3 1erOrdeRetardlaura22130Pas encore d'évaluation
- Correction TD12 OndesElectromagnetiques PDFDocument18 pagesCorrection TD12 OndesElectromagnetiques PDFkakakPas encore d'évaluation
- TD8 9Document6 pagesTD8 9Djm AlgPas encore d'évaluation
- R104 Fiche 7 Fcts TrigoDocument4 pagesR104 Fiche 7 Fcts TrigomanalPas encore d'évaluation
- Fic 00140Document3 pagesFic 00140MILAT MATHIEUPas encore d'évaluation
- TD 4Document2 pagesTD 43freefire 3gamePas encore d'évaluation
- Exercices Corriges Mecanique Du PointDocument124 pagesExercices Corriges Mecanique Du PointarmandgahoungaPas encore d'évaluation
- Ds 03Document2 pagesDs 03Ouss BenPas encore d'évaluation
- CNC MP 2016 Physique 2 Corrige PDFDocument9 pagesCNC MP 2016 Physique 2 Corrige PDFYassir Sadiq ElfilaliPas encore d'évaluation
- ds4 Ipest22 23 CorrigeDocument8 pagesds4 Ipest22 23 CorrigeYoussef MzabiPas encore d'évaluation
- 225 1 Dyn TD Bras de Robot A Muscles ArtificielsDocument4 pages225 1 Dyn TD Bras de Robot A Muscles ArtificielsFZLPas encore d'évaluation
- FLAMBEMENTDocument8 pagesFLAMBEMENTcheikhmoussandiayePas encore d'évaluation
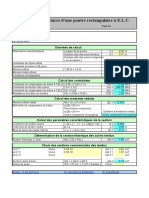
- Poutre Rectangulaire en ELUDocument2 pagesPoutre Rectangulaire en ELUAymen FrikhiPas encore d'évaluation
- DescriptiveDocument120 pagesDescriptiveAlain DorinPas encore d'évaluation
- Tome 2 CorrigeDocument32 pagesTome 2 CorrigecheikhmoussandiayePas encore d'évaluation
- S03 Mecageniciv 20Document2 pagesS03 Mecageniciv 20cheikhmoussandiayePas encore d'évaluation
- Physique D Chap9 Correction - ExosDocument2 pagesPhysique D Chap9 Correction - ExosAli SafiaPas encore d'évaluation
- APPLICATION Du Cours VidangeDocument2 pagesAPPLICATION Du Cours VidangeRayan D RogerPas encore d'évaluation
- PC T ch13 Bilan PDFDocument1 pagePC T ch13 Bilan PDFNail OuralPas encore d'évaluation
- Correction de La Série N°4 de MPM - 2020-2021-FacultatifDocument7 pagesCorrection de La Série N°4 de MPM - 2020-2021-FacultatifMounirPas encore d'évaluation
- 3Document10 pages3ak houssienPas encore d'évaluation
- C4 - Mouvement Dans Un Champ de Gravitation (VE) T°SIDocument3 pagesC4 - Mouvement Dans Un Champ de Gravitation (VE) T°SIalphaoumardiaaPas encore d'évaluation
- Dev 123Document3 pagesDev 123Anis GharbiPas encore d'évaluation
- ch6 CorrectionexercicesDocument4 pagesch6 CorrectionexercicesLaFouchettePas encore d'évaluation
- MP PHYSIQUE MINES 1 2007.enonceDocument7 pagesMP PHYSIQUE MINES 1 2007.enonceLeonce KomanPas encore d'évaluation
- Serie 5Document6 pagesSerie 5MohamedBenKacemPas encore d'évaluation
- Test Hydraulique Mmi 2023Document1 pageTest Hydraulique Mmi 2023Khaled GammoudiPas encore d'évaluation
- Delta VFDocument60 pagesDelta VFMFA AscenseurPas encore d'évaluation
- Chapitre 3Document3 pagesChapitre 3nasri imenPas encore d'évaluation
- TD 04 MQDocument2 pagesTD 04 MQloloPas encore d'évaluation
- Série D'exercices - Physique Oscillateurs Mecaniques Libres Amortis Et Non Amortis - Bac Sciences Exp (2011-2012) MR TRAYIA NABIL PDFDocument5 pagesSérie D'exercices - Physique Oscillateurs Mecaniques Libres Amortis Et Non Amortis - Bac Sciences Exp (2011-2012) MR TRAYIA NABIL PDFAzizElheni100% (3)
- Fiche 1 - Ondes ProgressivesDocument3 pagesFiche 1 - Ondes ProgressivesMohamed El Ouahdani50% (4)
- Exm Solide en Ligne VFDocument3 pagesExm Solide en Ligne VFrba05525Pas encore d'évaluation
- Examen2 Mécanique Des Fluides ApprofondieDocument2 pagesExamen2 Mécanique Des Fluides ApprofondieBrice Gaminte100% (1)
- Équilibrage Des Machines Alternatives PDFDocument38 pagesÉquilibrage Des Machines Alternatives PDFomar benani100% (1)
- T D Terminale DDocument72 pagesT D Terminale Dmedabdellahisamba34Pas encore d'évaluation
- Corrigé TD2 - 2021 2022Document10 pagesCorrigé TD2 - 2021 2022saidihakima87Pas encore d'évaluation
- td17 Me7 PDFDocument2 pagestd17 Me7 PDFbouhrara faroukPas encore d'évaluation
- 1bac Resume Travail Et Energie PotentielDocument2 pages1bac Resume Travail Et Energie PotentielEnidroun OutPas encore d'évaluation
- Chap 4 PDFDocument22 pagesChap 4 PDFikram nechbaPas encore d'évaluation
- Canaux MDF PDFDocument3 pagesCanaux MDF PDFHAKIMCTH07_579833911Pas encore d'évaluation
- Chap 6. Puissance, Inertie Et Couples EquivalentsDocument8 pagesChap 6. Puissance, Inertie Et Couples EquivalentsCheikh Abdoul Hakim BABOUPas encore d'évaluation
- 2009 Afrique Exo2 Correction Neptune Satellites 5 5ptsDocument2 pages2009 Afrique Exo2 Correction Neptune Satellites 5 5ptsasakuma2006Pas encore d'évaluation
- Gravita Ecole SarrDocument4 pagesGravita Ecole SarrMouhamed BaPas encore d'évaluation
- Oscillations HarmoniquesDocument14 pagesOscillations Harmoniquesfashionista louliPas encore d'évaluation
- 1BAC Rotation D'un Solide Indéformable Exercice Seri N1Document2 pages1BAC Rotation D'un Solide Indéformable Exercice Seri N1Lazul CoachingPas encore d'évaluation