ELECTROMÉCANIQUE 3ÈME ANNÉE
CHAPITRE 3
TRANSMISSION
MÉCANIQUE
DANS LES SYSTÈMES
D’ENTRAINEMENTS ÉLECTRIQUES
Contenu :
Ce chapitre présente la transmission mécanique au sein d’un système
d’entraînement électrique. Le calcul du rapport, des pertes et du rendement de la
transmission sont exposés. L’influence économique est également discutée.
Finalement, les aspects dynamiques, permettant de déterminer le rapport de
transmission optimal en fonction de différentes contraintes d’optimisation, sont
analysés.
HEIA-FR | Pérolles 80 | CH-1700 Fribourg | https://www.heia-fr.ch/fr/
Auteur(s) Version Date
Prof. D. Cajander / M. Tissières V1.0 23.07.2018
Chapitre 3: Transmission mécanique
1 Introduction .................................................................................................. 4
2 Principe ......................................................................................................... 5
2.1 Transmission tournant/tournant ................................................................ 5
2.2 Transmission tournant/linéaire .................................................................. 6
3 Transmission idéale (sans pertes) ............................................................... 7
4 Transmission réelle (avec pertes) ............................................................... 7
5 Adaptation de vitesse ................................................................................... 8
6 Aspects dynamiques d’optimisation ........................................................... 8
6.1 Accélération angulaire de la charge maximale ......................................... 8
6.2 Couple moteur minimal........................................................................... 10
7 Etude de cas ................................................................................................ 12
7.1 Equation du couple moteur ..................................................................... 13
8 Table des figures ........................................................................................ 16
9 Sources ........................................................................................................ 17
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 3 / 17
Chapitre 3: Transmission mécanique
1 INTRODUCTION
La définition d’un entraînement électrique est la suivante : un entraînement
électrique est un système assurant une conversion électromécanique par le biais
d’un moteur ou d’un transducteur et comprenant l’ensemble des périphériques
nécessaires à la transmission, à l’alimentation et au contrôle. La figure ci-dessous
illustre l’ensemble de ce système :
Réseau
Redresseur
= M
≈
Régulateur + + Charge
Onduleur Moteur Transmission
Capteur
Figure 1: Composants d'un entraînement électrique (Source [1])
La qualité du système entier est en fonction du composant le plus faible. Ainsi, il
faut s’assurer que chaque partie du système est optimisé, afin d’obtenir un
rendement énergétique et financier global maximal. Pour ce cours, on se focalise
sur la partie électromécanique, à savoir le moteur, la transmission, et la charge (ou
l’organe entraîné). Pour le reste, se référer aux autres cours (automatique &
électronique de puissance).
Après s’être principalement focalisé sur le moteur dans les deux premiers chapitres,
l’intérêt se porte maintenant sur la transmission. En effet, il est rare que la charge
soit entraînée directement par le moteur, car les besoins du système ne
correspondent pas souvent aux caractéristiques de sortie de celui-ci (couple,
vitesse). Ainsi, on réalise une adaptation en introduisant un mécanisme entre
l’organe entraîné et le moteur, que l’on appelle la transmission. Celle-ci permet
d’adapter le mouvement (par exemple via une conversion tournant/linéaire), la
vitesse, la résolution ou la dynamique du système, et ce moyennant des pertes. Il
devient alors nécessaire d’avoir à disposition des relations entre l’organe entraîné
et l’arbre moteur, qui sont donc caractéristiques de la transmission, et qui tiennent
en compte de la conservation de l’énergie.
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 4 / 17
Chapitre 3: Transmission mécanique
2 PRINCIPE
Le principe de la transmission mécanique est illustré ci-dessous :
Ωm Transmission Ωe (ve) Organe entraîné
Moteur
mécanique (charge)
Figure 2: Principe de la transmission mécanique entre moteur et organe entraîné
Avec : Ω𝑚𝑚 = vitesse de rotation à l’arbre du moteur [rad/s]
Ω𝑒𝑒 = vitesse de rotation de l’organe entraîné (après transmission) [rad/s]
𝑣𝑣𝑒𝑒 = vitesse linéaire de l’organe entraîné (après transmission) [m/s]
Il y a deux types principaux de transmission. En effet, l’organe entraîné peut
nécessiter un mouvement soit rotatif (Ω𝑒𝑒 ), soit linéaire (𝑣𝑣𝑒𝑒 ). On parlera alors d’une
transmission tournant/tournant ou tournant/linéaire, le premier terme étant le
mouvement du moteur (toujours rotatif) et le second étant le mouvement de la
charge. Le rapport de transmission se calcule alors de différentes manières.
2.1 Transmission tournant/tournant
Plusieurs objectifs sont visés par une transmission tournant/tournant :
• Multiplication ou réduction de vitesse ;
• Démultiplication de la résolution ;
• Démultiplication du couple ;
• Changement de sens ou de direction de rotation ;
On définit le rapport de transmission 𝑟𝑟 [ ] pour ce type de transmission :
Ωm γm ∆α m
=r = = [ −] (1)
Ωe
γe ∆α e
Vitesses Accélérations Déplacements
Avec : indice 𝑚𝑚 = moteur indice 𝑒𝑒 = organe entraîné
La puissance mécanique à l’arbre du moteur 𝑃𝑃𝑚𝑚 (avant la transmission) et la
puissance mécanique sur l’organe entraîné 𝑃𝑃𝑒𝑒 (après la transmission) se calcule
avec les formules bien connues suivantes :
P
=m M m ⋅ Ω m [W ] (2)
P
=e M e ⋅ Ωe [W ] (3)
La réalisation d’une transmission tournant/tournant peut se faire de différentes
manières : engrenages, poulies et courroie, poulies et câble, etc.
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 5 / 17
Chapitre 3: Transmission mécanique
2.2 Transmission tournant/linéaire
Outre le changement de mouvement, une transmission tournant/linéaire vise les
objectifs suivants :
• Conversion et contrôle de vitesse ;
• Conversion et contrôle de position ;
• Génération d’une force ;
Pour ce type de transmission, le rapport de transmission 𝑟𝑟 [𝑟𝑟𝑟𝑟𝑟𝑟/𝑚𝑚] se calcule par :
Ωm γm ∆α m
=r = = [rad m] (4)
ve ae ∆xe
Vitesses Accélérations Déplacements
Avec : indice 𝑚𝑚 = moteur indice 𝑒𝑒 = organe entraîné
Les puissances mécaniques 𝑃𝑃𝑚𝑚 et 𝑃𝑃𝑒𝑒 se calculent par :
P
=m M m ⋅ Ω m [W ] (5)
P=
e Fe ⋅ ve [W ] (6)
La réalisation d’une transmission tournant/linéaire se fait par différentes
techniques : poulies et courroie/câble, cabestan, engrenage et crémaillère, came,
bielle et excentrique, vis, vis à billes, vis à rouleaux, etc. Pour un système vis-écrou
selon la Figure 3, le rapport de transmission 𝑟𝑟 se calcule de la façon suivante :
2 ⋅π
r= [rad m] (7)
p
Avec : 𝑝𝑝 = pas de la vis [m]
ve
Ωm
M
Pas = p
Figure 3: Système vis-écrou
Pour le reste de cette théorie, on fera les différentes analyses selon une transmission
tournant/tournant. Pour se rapporter à un système tournant/linéaire, les analogies
suivantes s’appliquent :
Vitesses : Ω𝑒𝑒 ↔ 𝑣𝑣 𝑒𝑒 Déplacements : ∆𝛼𝛼𝑒𝑒 ↔ ∆𝑥𝑥𝑒𝑒
Accélérations : 𝛾𝛾𝑒𝑒 ↔ 𝑎𝑎𝑒𝑒 Couples-forces : 𝑀𝑀𝑒𝑒 ↔ 𝐹𝐹𝑒𝑒
Inerties-masses : 𝐽𝐽𝑒𝑒 ↔ 𝑚𝑚𝑒𝑒
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 6 / 17
Chapitre 3: Transmission mécanique
3 TRANSMISSION IDÉALE (SANS PERTES)
Dans le cas d’une transmission idéale, c’est-à-dire sans pertes mécaniques dues à la
transmission, on peut écrire les égalités suivantes :
Pm = Pe [W ] (8)
M m ⋅ Ω=
m M e ⋅ Ωe [W ] (9)
Ce qui permet d’écrire les rapports suivants :
M m Ωe 1
= = [ −] (10)
M e Ωm r
Les relations précédentes peuvent alors être symbolisées par un schéma équivalent :
Mm Me
r:1
Ωm Ωe
Figure 4: Schéma équivalent d'une transmission idéale
4 TRANSMISSION RÉELLE (AVEC PERTES)
Dans une transmission réelle, des pertes mécaniques sont présentes dans le système
de transmission à cause des frottements survenant lors du mouvement. On
symbolise cela par un schéma des puissances :
Pm T Pe
r,η
Pertes
Figure 5: Puissances dans une transmission réelle
Mathématiquement, le bilan des puissances est le suivant :
Pm= Pe + Pertes [W ] (11)
On définit le rendement 𝜂𝜂 (entre 0 et 1), selon le sens de transmission, comme :
Pe
η= [−] ⇒ Pe = η ⋅ Pm [W ] (12)
Pm
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 7 / 17
Chapitre 3: Transmission mécanique
En remplaçant les puissances par leur formule, on obtient :
M e ⋅ Ωe = η ⋅ M m ⋅ Ω m [W ] (13)
Le rapport des couples vaut alors :
Mm Ωe 1
= = [ −] (14)
M e η ⋅ Ωm η ⋅ r
Remarque : 𝑀𝑀𝑚𝑚 représente le primaire, 𝑀𝑀𝑒𝑒 le secondaire (analogie transformateur).
5 ADAPTATION DE VITESSE
La nécessité d’atteindre une certaine gamme de vitesse, élevée ou faible, peut
imposer une adaptation de vitesse. Toutefois, généralement, cette adaptation de
vitesse peut simplement être imposée par des critères économiques. En effet, le prix
d’un moteur (étant l’image de son volume 𝑉𝑉𝑚𝑚 et de son poids) est inversement
proportionnel à sa vitesse nominale Ω𝑚𝑚 , pour une puissance donnée (voir [1]) :
1
𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃 ∼ 𝑉𝑉𝑚𝑚 ∼ 𝛺𝛺 (15)
𝑚𝑚
Il est donc très souvent plus intéressant d’utiliser un moteur avec une vitesse de
rotation nominale élevée et une transmission réduisant cette vitesse, plutôt qu’un
moteur lent et une transmission directe (𝑟𝑟 = 1).
6 ASPECTS DYNAMIQUES D’OPTIMISATION
L’étude du comportement dynamique a pour but de montrer le rôle de la
transmission dans le système global, et tout particulièrement lors des phases
d’accélération. En effet, le choix du rapport de transmission influence les temps
d’accélération et de freinage. Il convient donc de réaliser un travail d’optimisation.
Ici, on traitera un cas sans couple de charge, et un autre avec.
6.1 Accélération angulaire de la charge maximale
Soit le système d’entraînement suivant, sans couple de charge :
M T e
Jm r Je
Mm η γe
Figure 6: Système d'entraînement sans couple de charge
𝐽𝐽𝑚𝑚 = inertie du moteur [kg.m2] ; 𝑟𝑟 = rapport de transmission [] ; 𝐽𝐽𝑒𝑒 = inertie de la charge [kg.m2]
𝑀𝑀𝑚𝑚 = couple moteur [Nm] ; 𝜂𝜂 = rendement de la transm. [] ; 𝛾𝛾𝑒𝑒 = accélération de la charge [rad/s2]
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 8 / 17
Chapitre 3: Transmission mécanique
On cherche à trouver quel est le rapport de transmission 𝑟𝑟 à avoir pour obtenir une
accélération angulaire de la charge 𝛾𝛾𝑒𝑒 maximale.
Pour cela, il convient d’écrire l’équation du couple moteur en fonction des
grandeurs entrant en jeu. Le couple moteur 𝑀𝑀𝑚𝑚 est la somme du couple propre du
moteur 𝑀𝑀𝑚𝑚,𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝 additionné au couple demandé par la charge et vu par le moteur
𝑀𝑀𝑒𝑒 ′, à travers la transmission. Ainsi :
M m M m , propre + M e ' [ Nm]
= (16)
Avec, selon les équations de mouvement bien connue :
d Ωm
M m , propre =Jm ⋅ =J m ⋅ γ m [ Nm] (17)
dt
1 d Ωe 1
M e '= ⋅ Je ⋅ = ⋅ J e ⋅ γ e [ Nm] (18)
η ⋅r dt η ⋅ r
Me
De plus, sachant que :
γ m = r ⋅ γ e [rad s 2 ] (19)
On obtient, pour le couple moteur :
1
M m = Jm ⋅ r ⋅ γ e + ⋅ J ⋅ γ [ Nm] (20)
η ⋅r e e
Pour déterminer le rapport de transmission 𝑟𝑟 pour une accélération angulaire de la
charge 𝛾𝛾𝑒𝑒 maximale, on pose :
dγ e
=0 (21)
dr
Ce qui simplifie l’équation (20) de la sorte :
Je ⋅ γ e
0 = Jm ⋅ γ e − (22)
η ⋅ r2
On isole alors le rapport de transmission, qui vaut :
Je
=rk [ −] (23)
η ⋅ Jm
NB : on utilise l’indice « k » pour indiquer que c’est une valeur optimale, permettant
d’obtenir l’accélération angulaire de la charge maximale 𝛾𝛾𝑒𝑒,𝑘𝑘 .
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 9 / 17
Chapitre 3: Transmission mécanique
Graphiquement, l’allure de 𝛾𝛾𝑒𝑒 en fonction de 𝑟𝑟 est la suivante (𝛾𝛾𝑒𝑒 = 𝑓𝑓(𝑟𝑟)) :
γe(r)
γe,k
r
rk
Figure 7: Allure de l'accélération angulaire de la charge en fonction du rapport de transmission
Dans le cas d’une transmission idéale (𝜂𝜂 = 1), on obtient :
Je Je
=rk [ −] ⇒
= Jm [kg ⋅ m 2 ] (24)
Jm rk 2
𝐽𝐽
On parle d’adaptation des inerties lorsque 𝐽𝐽𝑚𝑚 = 𝑟𝑟𝑒𝑒2 .
6.2 Couple moteur minimal
Soit le système d’entraînement suivant, avec un couple de charge (résistant) :
M T e
Jm r Je
Mm η γe
Mc
Figure 8: Système d'entraînement avec couple de charge
𝑀𝑀𝑐𝑐 = couple de charge résistant [Nm] ;
On cherche à déterminer quel est le rapport de transmission 𝑟𝑟 à avoir pour obtenir
un couple vu par le moteur 𝑀𝑀𝑚𝑚 minimal.
On réécrit l’équation du couple moteur 𝑀𝑀𝑚𝑚 , en y rajoutant le couple de charge vu
par le moteur 𝑀𝑀𝑐𝑐 ′, c’est-à-dire à travers la transmission :
1
M m = Jm ⋅ r ⋅ γ e + ⋅ J ⋅ γ + M c ' [ Nm] (25)
η ⋅r e e
M m , propre
Me '
Avec :
1
M
= c' ⋅ M c [ Nm] (26)
η ⋅r
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 10 / 17
Chapitre 3: Transmission mécanique
Ce qui donne :
1
M m = Jm ⋅ r ⋅ γ e + ⋅ ( J e ⋅ γ e + M c ) [ Nm] (27)
η ⋅r
Pour déterminer le rapport de transmission 𝑟𝑟 pour un couple moteur 𝑀𝑀𝑚𝑚 minimale,
on pose :
dM m
=0 (28)
dr
Ce qui simplifie l’équation (27) de la sorte :
1
0 = Jm ⋅ γ e − ⋅ ( Je ⋅ γ e + M c ) (29)
η ⋅ r2
On isole alors le rapport de transmission, qui vaut alors :
Je ⋅ γ e + M c
=ropt [ −] (30)
η ⋅ Jm ⋅ γ e
Dans le cas d’une transmission idéale (𝜂𝜂 = 1) et avec une inertie pur au niveau de
la charge (i.e. sans couple de charge : 𝑀𝑀𝑐𝑐 = 0), on obtient :
Je Je
ropt
= [ −] ⇒
= Jm [kg ⋅ m 2 ] (31)
Jm ropt 2
On retrouve ainsi l’adaptation des inerties citée plus haut.
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 11 / 17
Chapitre 3: Transmission mécanique
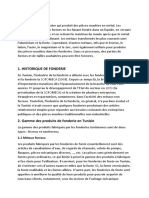
7 ETUDE DE CAS
La machine-outil est un appareil fréquemment utilisé dans l’industrie. Elle est, dans
la plupart des cas, partiellement ou totalement automatisée et comporte de multiple
moteur et capteurs. Elle est une parfaite illustration d’un cas concret d’application
de ce chapitre.
Figure 9 : Utilisation de machines-outils dans l'industrie
A travers l’exemple pratique ci-dessous, nous allons utiliser et développer nos
calculs à partir du profil vitesse du chariot de la machine.
Considérons une masse pour le chariot de la machine-outil de 1300 kg. La machine
devra usiner des pièces allant jusqu’à une masse de 200 kg. Ce chariot est mû par
un moteur à travers une vis ayant un pas de 10 mm. Le rendement de la transmission
est égal à 0.87. Le facteur de frottement est égal à 0.25.
Le profil en vitesse du chariot est périodique. Les différentes phases de ce profil
sont représentées à la figure ci-dessous.
Figure 10 : Profil en vitesse périodique du cas considéré
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 12 / 17
Chapitre 3: Transmission mécanique
Typiquement, lors de la conception de la machine afin de déterminer les
caractéristiques du moteur destiné à entrainer la vis, on devra établir les couples et
accélérations moteurs nécessaires dans chaque phase du profil en vitesse.
Le cahier des charges indique que la force d’usinage est de 4000 N. Les moments
d’inertie du moteur et de la vis valent respectivement 30*10-3 kgm2 et 50*10-3 kgm2.
Il est important, avant de calculer pour chaque phase élémentaire le couple moteur,
de se représenter la situation sous forme de schéma :
Figure 11 : Schéma de la situation pour l'étude de cas
Jm : inertie du moteur ; Jv : inertie de la vis ; mch, mp : masse chariot, pièce
Mm : couple moteur ; ηT : rendement de la transm. ; ac : accélération de la charge
r : rapport de transmission ; vc : vitesse de la charge
μc : facteur de frottement
Fu : force d’usinage
7.1 Equation du couple moteur
On sait que le couple moteur 𝑀𝑀𝑚𝑚 est la somme du couple propre du moteur
𝑀𝑀𝑚𝑚,𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝 , du couple propre de la vis 𝑀𝑀𝑣𝑣,𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝 , et de la force totale appliquée sur
l’organe entraîné rapportée au moteur 𝐹𝐹𝑡𝑡𝑡𝑡𝑡𝑡 ′ (force car mouvement linéaire) :
M m = M m , propre + M v , propre + Ftot ' [ Nm] (32)
Avec :
M m , propre = J m ⋅ γ m = J m ⋅ r ⋅ ac [ Nm] (33)
M v , propre = J v ⋅ γ m = J v ⋅ r ⋅ ac [ Nm] (34)
1
Ftot '
= ⋅ F [ Nm] (35)
ηT ⋅ r tot
Donc :
1
⇒ M m= ( J m + J v ) ⋅ r ⋅ ac + ⋅ F [ Nm] (36)
ηT ⋅ r tot
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 13 / 17
Chapitre 3: Transmission mécanique
Il nous faut maintenant déterminer 𝐹𝐹𝑡𝑡𝑡𝑡𝑡𝑡 . Pour cela, on doit passer par un
diagramme des forces (croquis), rappel du cours de physique. On représente là les
forces agissant sur l’organe entraîné, c’est-à-dire l’ensemble chariot de la machine-
outil (𝑚𝑚𝑐𝑐ℎ ) et pièce à usiner (𝑚𝑚𝑝𝑝 ) :
Figure 12 : Diagramme des forces agissant sur l'organe entraîné
On voit que la force totale 𝐹𝐹𝑡𝑡𝑡𝑡𝑡𝑡 que le moteur devra fournir à travers la transmission
est la somme des force d’accélération 𝐹𝐹𝑎𝑎 , de frottement 𝐹𝐹𝑓𝑓 , et d’usinage 𝐹𝐹𝑢𝑢 :
Ftot = Fa + Ff + Fu [ N ] (37)
Selon les lois de la physique, on peut déterminer 𝐹𝐹𝑎𝑎 et 𝐹𝐹𝑓𝑓 (𝐹𝐹𝑢𝑢 étant une donnée)
(𝑔𝑔 = 9.81 𝑚𝑚 ∙ 𝑠𝑠 −2 ) :
Fa = (mch + m p ) ⋅ ac [ N ] (38)
⋅ µc sign(Vc ) ⋅ Fg ⋅ µc
Ff sign(Vc ) ⋅ FN =
=
(39)
= sign(Vc ) ⋅ (mch + m p ) ⋅ g ⋅ µc [ N ]
Avec :
sign(Vc ) = −1 pour -∞ < Vc < 0
sign(Vc ) 0=
= pour Vc 0 (40)
sign(V ) 1
= pour 0 < Vc < +∞
c
On peut ainsi écrire :
Ftot = Fa + Ff + Fu
(41)
= (mch + m p ) ⋅ ac + sign(Vc ) ⋅ (mch + m p ) ⋅ g ⋅ µc + Fu [ N ]
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 14 / 17
Chapitre 3: Transmission mécanique
Ce qui donne finalement, pour l’équation du couple moteur 𝑀𝑀𝑚𝑚 :
M m= ( J m + J v ) ⋅ r ⋅ ac
1 (42)
+ ⋅ (mch + m p ) ⋅ ac + sign(Vc ) ⋅ (mch + m p ) ⋅ g ⋅ µc + Fu [ Nm]
ηT ⋅ r
Il faut maintenant déterminer les termes de cette équation qui s’annulent en fonction
des phases du profil en question. Sur le profil en vitesse de la Figure 10, on distingue
3 phases : approche ou retour, usinage, et repos.
• Pour l’approche ou le retour, on n’applique pas la force d’usinage 𝐹𝐹𝑢𝑢 :
M m= ( J m + J v ) ⋅ r ⋅ ac
1 (43)
+ ⋅ (mch + m p ) ⋅ ac + sign(Vc ) ⋅ (mch + m p ) ⋅ g ⋅ µc [ Nm]
ηT ⋅ r
• Pour l’usinage, il n’y a pas d’accélération 𝑎𝑎𝑐𝑐 :
1
M= ⋅ sign(Vc ) ⋅ (mch + m p ) ⋅ g ⋅ µc + Fu [ Nm] (44)
m
ηT ⋅ r
• Pour le repos, il n’y a ni usinage 𝐹𝐹𝑢𝑢 , ni accélération 𝑎𝑎𝑐𝑐 :
1
M= ⋅ sign(Vc ) ⋅ (mch + m p ) ⋅ g ⋅ µc [ Nm] (45)
m
ηT ⋅ r
La résolution numérique de cette étude de cas sera effectuée dans l’exercice 3 de ce
chapitre.
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 15 / 17
Chapitre 3: Transmission mécanique
8 TABLE DES FIGURES
Figure 1: Composants d'un entraînement électrique (Source [1]) 4
Figure 2: Principe de la transmission mécanique entre moteur et organe entraîné 5
Figure 3: Système vis-écrou 6
Figure 4: Schéma équivalent d'une transmission idéale 7
Figure 5: Puissances dans une transmission réelle 7
Figure 6: Système d'entraînement sans couple de charge 8
Figure 7: Allure de l'accélération angulaire de la charge en fonction du rapport de transmission 10
Figure 8: Système d'entraînement avec couple de charge 10
Figure 9 : Utilisation de machines-outils dans l'industrie 12
Figure 10 : Profil en vitesse périodique du cas considéré 12
Figure 11 : Schéma de la situation pour l'étude de cas 13
Figure 12 : Diagramme des forces agissant sur l'organe entraîné 14
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 16 / 17
Chapitre 3: Transmission mécanique
9 SOURCES
[1] Prof. Marcel Jufer. « Entraînements électriques, automatisation et processus
électriques – 2e partie : Entrainements électriques : méthodologie de conception ».
Programme RAVEL. Office fédéral des questions conjoncturelles. 1996
[2] Prof. Mustapha Lakehal. Cours d’électromécanique et entrainement électrique 3e
année. 2017.
[3] Frédéric de Coulon & Marcel Jufer. « Introduction à l’électrotechnique ». Traité
d’Electricité. Volume I. PPUR – 2ème édition. 14/09/2013.
[4] Fred Gardiol. « Electromagnétisme ». Traité d’Electricité. Volume III. PPUR – 2ème
édition. 15/09/2016.
[5] Marcel Jufer. « Electromécanique ». Traité d’Electricité. Volume IX. PPUR – 3ème
édition. 22/11/2017.
[6] Jean Chatelain. « Machines électriques ». Traité d’Electricité. Volume X. PPUR –
2ème édition. 14/09/2013.
[7] Hansruedi Bühler. « Electronique de puissance ». Traité d’Electricité. Volume XV.
PPUR – 5ème édition. 14/09/2013.
[8] Hansruedi Bühler. « Electronique de réglage et de commande ». Traité
d’Electricité. Volume XVI. PPUR – 2ème édition. 14/09/2013.
Electromécanique 3ème année | HEIA-FR © D.C. / M.T. Page 17 / 17
Vous aimerez peut-être aussi
- COURS - COMMAND-1-converti - M1MIMSTDocument10 pagesCOURS - COMMAND-1-converti - M1MIMSTkamdem kouam ynnickPas encore d'évaluation
- Entrainements ÉlectriquesDocument5 pagesEntrainements ÉlectriquesYahiyaoui SofyanePas encore d'évaluation
- Partie III - Motorisation de Processus ÉlectromécaniqueDocument11 pagesPartie III - Motorisation de Processus ÉlectromécaniqueAbdoul Kader OUATTARAPas encore d'évaluation
- CH05 Mécanisme de Transmission Du MouvementDocument8 pagesCH05 Mécanisme de Transmission Du Mouvementmouf zerargaPas encore d'évaluation
- Asservissement MCCDocument37 pagesAsservissement MCCsmail4everPas encore d'évaluation
- TD1 Remontée Mécanique CorrectionDocument5 pagesTD1 Remontée Mécanique Correctionperol100% (1)
- Transmission de PuissanceDocument19 pagesTransmission de PuissanceAVEGUEPas encore d'évaluation
- Sujet Commande DoctoratDocument3 pagesSujet Commande DoctoratAbd NACERIPas encore d'évaluation
- Cours Chaines de Puissance v1Document10 pagesCours Chaines de Puissance v1mounirgemPas encore d'évaluation
- COURS Commande Des Machines CA MCSI-convertiDocument44 pagesCOURS Commande Des Machines CA MCSI-convertiAbdy HamenihPas encore d'évaluation
- TP N°01 PDFDocument11 pagesTP N°01 PDFBrahim GasbaouiPas encore d'évaluation
- Commande - Machines Electriques - Cours 1Document23 pagesCommande - Machines Electriques - Cours 1SORY IBRAHIMA SAMBAPas encore d'évaluation
- Cours 03 - Loi Entree SortieDocument10 pagesCours 03 - Loi Entree SortieEdgar Étape100% (1)
- Dimensionnement Sys D'entrainement PDFDocument40 pagesDimensionnement Sys D'entrainement PDFichrakPas encore d'évaluation
- Dossier DAE v2Document29 pagesDossier DAE v2Francis Kengne100% (1)
- FR Technical Guide No 7 REVCDocument40 pagesFR Technical Guide No 7 REVCbado badoxPas encore d'évaluation
- MCC DynamiqueDocument8 pagesMCC DynamiqueDarkedgePas encore d'évaluation
- MCC DynamiqueDocument9 pagesMCC DynamiqueLa ReinaPas encore d'évaluation
- Contrôle 4 - 2023Document4 pagesContrôle 4 - 2023Bilal LaakelPas encore d'évaluation
- Chp1 Variateur de Vitesse PDFDocument10 pagesChp1 Variateur de Vitesse PDFJamila DebayaPas encore d'évaluation
- Etude Comparative Entre La Commande Vectorielle Et La Commande ScalaireDocument11 pagesEtude Comparative Entre La Commande Vectorielle Et La Commande ScalaireMohammed Reda Gaila100% (2)
- Transmission Dde PuissanceDocument32 pagesTransmission Dde PuissanceAbi ClémentPas encore d'évaluation
- (TDP) (CO) Transmission de Puissance PDFDocument16 pages(TDP) (CO) Transmission de Puissance PDFabdelhalimPas encore d'évaluation
- BrahmiDocument5 pagesBrahmiabfstbmsodPas encore d'évaluation
- DTDAEDocument23 pagesDTDAENour ouzeriPas encore d'évaluation
- Transmission de Puissance Prof PDFDocument16 pagesTransmission de Puissance Prof PDFRuppy MIYOUNAPas encore d'évaluation
- RevMP Sii AutomatiqueDocument30 pagesRevMP Sii AutomatiqueRebbag AnassPas encore d'évaluation
- Régime Dynamique Mcc1Document10 pagesRégime Dynamique Mcc1Rachid BenjalouajaPas encore d'évaluation
- (CElm) (CO) Conversion ElectromecaniqueDocument24 pages(CElm) (CO) Conversion ElectromecaniqueSirineJamoussiPas encore d'évaluation
- 02AC2.3 - Exercices Puissance - PROFDocument4 pages02AC2.3 - Exercices Puissance - PROFSewa MensahPas encore d'évaluation
- Technologie Entrainement Electrique M1Document95 pagesTechnologie Entrainement Electrique M1etumangelerodriguePas encore d'évaluation
- Commande Electrique de Mécanismes IndustrielsDocument35 pagesCommande Electrique de Mécanismes Industrielsfarid saadPas encore d'évaluation
- IST Commande Des Machines ELT3 140421 P2Document105 pagesIST Commande Des Machines ELT3 140421 P2Joël SebgoPas encore d'évaluation
- (Tec) (CO) Transmission de PuissanceDocument18 pages(Tec) (CO) Transmission de PuissanceousmanePas encore d'évaluation
- Partie I - Généralités Sur Les Entrainements ÉlectromécaniqueDocument4 pagesPartie I - Généralités Sur Les Entrainements ÉlectromécaniqueAbdoul Kader OUATTARAPas encore d'évaluation
- SeifDocument18 pagesSeifAdam kingPas encore d'évaluation
- TP3 Servo-Moteur-Synchrone v1Document18 pagesTP3 Servo-Moteur-Synchrone v1Syrine MzoughiPas encore d'évaluation
- CHERGUIII2Document9 pagesCHERGUIII2Masouda NaboulaPas encore d'évaluation
- EOLIENNEDocument4 pagesEOLIENNEHamouchePas encore d'évaluation
- MCC DynamiqueDocument8 pagesMCC DynamiqueHoussameAlexandre100% (1)
- 6115 Enonce Verin 6 AxesDocument6 pages6115 Enonce Verin 6 AxesMohammed RedPas encore d'évaluation
- Variateurs de Vitesse - de La Régulation Cascade À La Commande Vectorielle PSIMDocument55 pagesVariateurs de Vitesse - de La Régulation Cascade À La Commande Vectorielle PSIMBALLOUK Soufiane100% (4)
- Commande Automatique Dune Eolienne Mars 2023 (Rectified)Document5 pagesCommande Automatique Dune Eolienne Mars 2023 (Rectified)Aym HafPas encore d'évaluation
- Cours TaDocument25 pagesCours TaKara Reda100% (1)
- Cours Chaines de Puissance 2015Document10 pagesCours Chaines de Puissance 2015semahPas encore d'évaluation
- Entraînements Électriques À Vitesse VariableDocument5 pagesEntraînements Électriques À Vitesse VariableHadil SellamiPas encore d'évaluation
- Chap - 2 - Le Régime de Fonctionnement Des Moteurs ÉlectriquesDocument5 pagesChap - 2 - Le Régime de Fonctionnement Des Moteurs Électriqueskhaled100% (1)
- La Variation de VitesseDocument6 pagesLa Variation de Vitessenajim68Pas encore d'évaluation
- Commande MCCDocument20 pagesCommande MCCAmIne Omda100% (1)
- Chap1la Variation de Vitesse-2Document6 pagesChap1la Variation de Vitesse-2مفتاح الدينPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- Unitrac 92-102 FRDocument256 pagesUnitrac 92-102 FRjean talus100% (1)
- Cas Pratique SARL BASQUAIR ÉnoncéDocument1 pageCas Pratique SARL BASQUAIR ÉnoncéPierre DelarueaPas encore d'évaluation
- TEST Connaissance PLSQLDocument3 pagesTEST Connaissance PLSQLFORMATION ORADISTPas encore d'évaluation
- Examen Ro 21Document1 pageExamen Ro 21صنع في المنزل Made at homePas encore d'évaluation
- Le Contrat de Transport International 2022Document10 pagesLe Contrat de Transport International 2022Amina ChiahiPas encore d'évaluation
- Le Chauffage Par InductionDocument4 pagesLe Chauffage Par InductionboboPas encore d'évaluation
- La Phrase - La Forme Affirmative Et La Forme Négative - MaxicoursDocument4 pagesLa Phrase - La Forme Affirmative Et La Forme Négative - MaxicoursTOUTA TOTOPas encore d'évaluation
- Modele Acte D'engagementDocument2 pagesModele Acte D'engagementzak.sb22Pas encore d'évaluation
- Rapport 1Document13 pagesRapport 1Safwen BoufaidPas encore d'évaluation
- Manuel de Vol C 150 PDFDocument43 pagesManuel de Vol C 150 PDFjmlezcanoPas encore d'évaluation
- Myfrenchbank Christophe CarreDocument1 pageMyfrenchbank Christophe CarreyomanhcPas encore d'évaluation
- Résumé ImpedanceDocument7 pagesRésumé Impedancehelmi copy centerPas encore d'évaluation
- Cours Droit GOZZIDocument32 pagesCours Droit GOZZINicoleta BusuiocPas encore d'évaluation
- Parlons RH Barometre de L Experience Collaobrateur Edition 2021Document22 pagesParlons RH Barometre de L Experience Collaobrateur Edition 2021fatima elyaakoubiPas encore d'évaluation
- Cps MarchéDocument22 pagesCps Marchéyoussef benaniPas encore d'évaluation
- Chapitre 7 Les Couts LogistiquesDocument2 pagesChapitre 7 Les Couts LogistiquesMohamedPas encore d'évaluation
- Note de Calcul NabDocument5 pagesNote de Calcul NabLyes AlgerianoPas encore d'évaluation
- MS311 MS391Document94 pagesMS311 MS391Bruno DenollePas encore d'évaluation
- Formation Methode HaccpDocument111 pagesFormation Methode HaccpTIEBE SERGESPas encore d'évaluation
- VALEO - Ignition Spare Parts 2007 PDFDocument636 pagesVALEO - Ignition Spare Parts 2007 PDFgeorge_scala100% (1)
- Exercices Mtcna - Module 1 - V1Document9 pagesExercices Mtcna - Module 1 - V1Garry Moore100% (1)
- Guide EasyctnDocument13 pagesGuide EasyctnKossi Norbert LawadanPas encore d'évaluation
- Raffinage Pétrolier - Principe, Fonctionnement, Acteurs Et RaffinerieDocument7 pagesRaffinage Pétrolier - Principe, Fonctionnement, Acteurs Et RaffinerieSamPas encore d'évaluation
- Gestion Des RDV - Cahier de ChargeDocument4 pagesGestion Des RDV - Cahier de ChargeAdalou NIAONEPas encore d'évaluation
- 0002 3 10.1generalitesDocument103 pages0002 3 10.1generalitesJason CruisePas encore d'évaluation
- VOTRE ORDINATEUR 03 1984-01-02 (Acme)Document92 pagesVOTRE ORDINATEUR 03 1984-01-02 (Acme)Taranis35Pas encore d'évaluation
- Maymana ContenuDocument161 pagesMaymana ContenuMohammed ZizahPas encore d'évaluation
- MAH4444Document139 pagesMAH4444بلقاسم جلاليPas encore d'évaluation
- Alcatel CMDDocument11 pagesAlcatel CMDmobio jeanPas encore d'évaluation
- Cours de Fiscalitã© Internationale 2022 2023 PDFDocument164 pagesCours de Fiscalitã© Internationale 2022 2023 PDFSirine JabesPas encore d'évaluation