Vous aimerez peut-être aussi
- Machine Asynchrone ExoDocument3 pagesMachine Asynchrone Exozaki1700100% (1)
- TP N°2: Etude Des Caractéristiques D'un Moteur Asynchrone Triphasé À CageDocument4 pagesTP N°2: Etude Des Caractéristiques D'un Moteur Asynchrone Triphasé À CageBrandy Odonnell100% (5)
- Exercice Machines AsynchronesDocument10 pagesExercice Machines Asynchronesfouad100% (5)
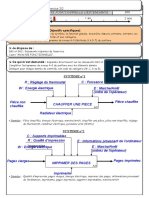
- Exercice Analyse Fonctionnlle Descendante eDocument2 pagesExercice Analyse Fonctionnlle Descendante eMed Le oi100% (1)
- Chap. III Théorie Des Machines Asynchrones TriphaseesDocument27 pagesChap. III Théorie Des Machines Asynchrones Triphaseeshamyassine58Pas encore d'évaluation
- Machine Asynchrone TriphaséeDocument26 pagesMachine Asynchrone TriphaséekeylogPas encore d'évaluation
- Cours: Machine Asynchrone: I-Généralités 1 - DéfinitionDocument10 pagesCours: Machine Asynchrone: I-Généralités 1 - DéfinitionFatiPas encore d'évaluation
- Association Convertisseur - MASDocument137 pagesAssociation Convertisseur - MASrajaa latifiPas encore d'évaluation
- 05 MAS-N1 DM Ima401Document12 pages05 MAS-N1 DM Ima401salwa.echalih-etuPas encore d'évaluation
- ChiiDocument20 pagesChiiNedjmeddine ZemPas encore d'évaluation
- Chap3 Machine AsynchroneDocument41 pagesChap3 Machine AsynchroneIlyas NahiPas encore d'évaluation
- MAS Cours CompletDocument39 pagesMAS Cours Completطنين نسنسPas encore d'évaluation
- TP MasDocument9 pagesTP MasDjalal Eddine HammachiPas encore d'évaluation
- TD MasDocument4 pagesTD MasGbah KONEPas encore d'évaluation
- VI - Les Machines Asynchrones TriphaséesDocument21 pagesVI - Les Machines Asynchrones TriphaséesimadPas encore d'évaluation
- Exercices Corrigés MAS GrpEDocument5 pagesExercices Corrigés MAS GrpENourBouzidPas encore d'évaluation
- Cours Machine M C A E3MG SuiteDocument58 pagesCours Machine M C A E3MG Suiteglavanny cherel OLENDEPas encore d'évaluation
- Chapitre I - MAS (Cours)Document11 pagesChapitre I - MAS (Cours)Youssef dbPas encore d'évaluation
- Cours8 Modèle MASDocument26 pagesCours8 Modèle MASKamal PcPas encore d'évaluation
- Diapo de CoursDocument36 pagesDiapo de Courssaid waelPas encore d'évaluation
- Ch6 Machine SynchroneDocument18 pagesCh6 Machine Synchronearnaud29100% (3)
- Cours Moteur AsynchroneDocument7 pagesCours Moteur AsynchroneOmar Ait gabPas encore d'évaluation
- Multisim: Pr. E.M. Skouri 1Document2 pagesMultisim: Pr. E.M. Skouri 1Mohamed ZnbPas encore d'évaluation
- Modelisation MASDocument14 pagesModelisation MASBelkacem NadirPas encore d'évaluation
- Correction SerieDocument6 pagesCorrection SerieSidahmed LarbaouiPas encore d'évaluation
- SaadiDocument14 pagesSaadiZakaria MaazazPas encore d'évaluation
- Moteur Asynchrone Triphasé: 1. Constitution Et Principe de FonctionnementDocument7 pagesMoteur Asynchrone Triphasé: 1. Constitution Et Principe de Fonctionnementhassna ait aliPas encore d'évaluation
- Chap 4 Moteur Triphasé AsynchroneDocument5 pagesChap 4 Moteur Triphasé AsynchroneMuhammad BneijaraPas encore d'évaluation
- Modelisation Machine AsynchroneDocument13 pagesModelisation Machine AsynchronenaibPas encore d'évaluation
- Cours MA Olfa 20 02 2016Document28 pagesCours MA Olfa 20 02 2016Parc ElyesPas encore d'évaluation
- 06 MoteurAsynchrone v2018Document15 pages06 MoteurAsynchrone v2018mathis.morinPas encore d'évaluation
- MAS3 - CoursDocument5 pagesMAS3 - Coursben 10Pas encore d'évaluation
- TD4 - C2i2s 2020-21Document2 pagesTD4 - C2i2s 2020-21DB StorPas encore d'évaluation
- Machine Synch TriphaséDocument19 pagesMachine Synch TriphaséHelmy AYEDIPas encore d'évaluation
- Chapitre II Le Moteur AsynchroneDocument12 pagesChapitre II Le Moteur AsynchroneAziz Kabore100% (1)
- Chapitre - 3 - Machine à Courant ContinuDocument31 pagesChapitre - 3 - Machine à Courant ContinuboutalibzinebPas encore d'évaluation
- CORRECTD7Document6 pagesCORRECTD7Bounegab YoucefPas encore d'évaluation
- Cours Lp3eme Chapitre Moteur AsynchroneDocument15 pagesCours Lp3eme Chapitre Moteur AsynchroneSimo LaassiriPas encore d'évaluation
- Cours - Variateur de Vitesse - MCADocument28 pagesCours - Variateur de Vitesse - MCAboutalibzinebPas encore d'évaluation
- Transmission de PuissanceDocument6 pagesTransmission de Puissancethe knowledge is powerPas encore d'évaluation
- TD Moteurs AsynchronesDocument10 pagesTD Moteurs AsynchronesRadoineMarzaukPas encore d'évaluation
- Cours Machine Synchrone TgettDocument22 pagesCours Machine Synchrone TgettKOUADIO PATRICEPas encore d'évaluation
- TD N°4-AutoDocument10 pagesTD N°4-AutoSamira 1986Pas encore d'évaluation
- Résumé Cours M122C 3eme Chapitre Moteur Asynchrone 2023-2024 - CopieDocument5 pagesRésumé Cours M122C 3eme Chapitre Moteur Asynchrone 2023-2024 - Copiemohedmahjoub1937Pas encore d'évaluation
- Dossier Travail Demande Truelle Bg39Document17 pagesDossier Travail Demande Truelle Bg39michelPas encore d'évaluation
- Transformateur de Manier SimpleDocument28 pagesTransformateur de Manier Simplefethi100% (1)
- TD - Actionneurs Electriques À Courant AlternatifDocument14 pagesTD - Actionneurs Electriques À Courant AlternatifJunior Issongui100% (2)
- 2-Cours Machine À Courant ContinuDocument28 pages2-Cours Machine À Courant ContinuNírmo Nìro100% (1)
- Chapitre 1 Rappels Les Machines Asynchrones TriphaseesDocument9 pagesChapitre 1 Rappels Les Machines Asynchrones TriphaseesNuno HenriquesPas encore d'évaluation
- ELG2736 Slides Chapter 8Document96 pagesELG2736 Slides Chapter 8Gedeon KayaPas encore d'évaluation
- Ch1 Machine A Courant ContinuDocument31 pagesCh1 Machine A Courant ContinuMessaoud Djamal LaidiPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- Cours Electronique Analog CompletDocument40 pagesCours Electronique Analog CompletMoez YoussefPas encore d'évaluation
- PB Ampli 2etage Bip Bts79Document4 pagesPB Ampli 2etage Bip Bts79Moez YoussefPas encore d'évaluation
- Commande MCC bts89Document3 pagesCommande MCC bts89Moez YoussefPas encore d'évaluation
- Td-Eln Analog CompletDocument10 pagesTd-Eln Analog CompletMoez YoussefPas encore d'évaluation
- Corrige Bts80commccDocument3 pagesCorrige Bts80commccMoez YoussefPas encore d'évaluation
- TP N°3 Modélisation Et Simulation de La Machine Asynchrone À Cage D'écureuilDocument6 pagesTP N°3 Modélisation Et Simulation de La Machine Asynchrone À Cage D'écureuilMoez YoussefPas encore d'évaluation
- Corrigé bts81Document3 pagesCorrigé bts81Moez YoussefPas encore d'évaluation
- TD1 HacheursDocument3 pagesTD1 HacheursMoez YoussefPas encore d'évaluation
- TP N°1 MCCDocument2 pagesTP N°1 MCCMoez YoussefPas encore d'évaluation
- Commande MCCDocument20 pagesCommande MCCMoez YoussefPas encore d'évaluation
- Chap1 - Introduction Electronique de Puissance PDFDocument20 pagesChap1 - Introduction Electronique de Puissance PDFMoez YoussefPas encore d'évaluation
- Cours Acada AutomatiqueDocument55 pagesCours Acada AutomatiqueMoez YoussefPas encore d'évaluation
- Systèmes Logiques CombinatoiresDocument23 pagesSystèmes Logiques CombinatoiresMoez YoussefPas encore d'évaluation
- Impact de L'intégration Des EnRDocument60 pagesImpact de L'intégration Des EnROMAR100% (1)
- 9782756418377Document122 pages9782756418377AdrienNonjon50% (2)
- These SIGNORETDocument235 pagesThese SIGNORETcsc EXPERTISEPas encore d'évaluation
- Rapport Stage Agnes MallaretDocument37 pagesRapport Stage Agnes MallaretAziz El KhalfiPas encore d'évaluation
- Chap - 1 - Généralités Sur Les Réseaux ÉlectriquesDocument12 pagesChap - 1 - Généralités Sur Les Réseaux ÉlectriquesAouragh RedduanePas encore d'évaluation
- Guide Proprietaire Carnet D Information Du LogementDocument8 pagesGuide Proprietaire Carnet D Information Du Logementraffaela.bientinesiPas encore d'évaluation
- Catalogue Chaffoteaux 2013Document0 pageCatalogue Chaffoteaux 2013Maison EnergyPas encore d'évaluation
- Fascicule TL2 - ContenuDocument144 pagesFascicule TL2 - ContenuDaboPas encore d'évaluation
- CH1 Introduction A La Commande Des Machines Electriques A Courant ContinuDocument65 pagesCH1 Introduction A La Commande Des Machines Electriques A Courant ContinumarPas encore d'évaluation
- Stockage ThermiqueDocument32 pagesStockage Thermiquebrahim.elgarnaoui1998Pas encore d'évaluation
- Guide Fourniture Energie Electrique Cle24b1be-2Document41 pagesGuide Fourniture Energie Electrique Cle24b1be-2sistaLOAUREM SABAHPas encore d'évaluation
- La Qualite Denergie Les HarmoniquesDocument23 pagesLa Qualite Denergie Les HarmoniquesAbdelkrim IDIRPas encore d'évaluation
- La Voiture Électrique Est Elle Écolo GRD OralDocument5 pagesLa Voiture Électrique Est Elle Écolo GRD Oraljorie1804Pas encore d'évaluation
- Fonction Convertir Actionneur Electrique Moteur A Courant Continu MCC ExercicesDocument12 pagesFonction Convertir Actionneur Electrique Moteur A Courant Continu MCC Exerciceseva evaPas encore d'évaluation
- 14éme Rencontre Annuelle CLUB-ER Coton180119165955Document19 pages14éme Rencontre Annuelle CLUB-ER Coton180119165955K.Tani-Eyatom PILINGAPas encore d'évaluation
- Cahier de Charge-Raccordement HT-MTDocument34 pagesCahier de Charge-Raccordement HT-MTAmine Ben Abdeladhim100% (1)
- No 11020Document34 pagesNo 11020SAE techPas encore d'évaluation
- ENPU2023Document3 pagesENPU2023Taf AmourPas encore d'évaluation
- PE Pour Le Transformateur Et Le Neutre2Document8 pagesPE Pour Le Transformateur Et Le Neutre2Marouane HADDADPas encore d'évaluation
- Being Book FrenchDocument5 pagesBeing Book FrenchYaw All0% (1)
- Cours 3Document4 pagesCours 3Med Ali MaatougPas encore d'évaluation
- Schema Démarrage Moteur AsynchroneDocument15 pagesSchema Démarrage Moteur Asynchronesoukayna barraPas encore d'évaluation
- Etude D'un Système Éolien Connecté Au Réseau, Basé Sur Une GAS Auto-ExcitéeDocument102 pagesEtude D'un Système Éolien Connecté Au Réseau, Basé Sur Une GAS Auto-ExcitéeNadia Mars HenchirPas encore d'évaluation
- Electro Techniques 4Document29 pagesElectro Techniques 4Tarak BenslimanePas encore d'évaluation
- Guide de Conception Et de Realisation D Armoire de Compensation BT 2004 PDFDocument44 pagesGuide de Conception Et de Realisation D Armoire de Compensation BT 2004 PDFsoares_alexPas encore d'évaluation
- Marga SCDocument39 pagesMarga SCAIT BOULAHCENPas encore d'évaluation
- Installation BatimentDocument15 pagesInstallation BatimentArnaud MONTCHOPas encore d'évaluation
- Stockage de Votre Moteur Hors-Bord Honda PDFDocument1 pageStockage de Votre Moteur Hors-Bord Honda PDFFrancois RobertPas encore d'évaluation
- NEOBUSDocument3 pagesNEOBUSEricPas encore d'évaluation