Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Reseau D'antenne Part 1 AnalyseDocument13 pagesReseau D'antenne Part 1 AnalyseMarouane Bendi AbdellahPas encore d'évaluation
- Machine Asynchrone MatlabDocument22 pagesMachine Asynchrone Matlabimad el-ghayouryPas encore d'évaluation
- Ds Filtre de Hartley 19 Nov 18 PDFDocument4 pagesDs Filtre de Hartley 19 Nov 18 PDFYassir Sadiq Elfilali80% (5)
- TP02Document2 pagesTP02Kebir YassinePas encore d'évaluation
- 1-Les MouvementsDocument7 pages1-Les Mouvementsapi-446600404Pas encore d'évaluation
- Cours 5ptp Energie Convertisseurs de PuissanceDocument43 pagesCours 5ptp Energie Convertisseurs de Puissanceking azPas encore d'évaluation
- 4 Logique Sequentielle PDFDocument24 pages4 Logique Sequentielle PDFkhocinePas encore d'évaluation
- Cours Elm M1 MCCDocument8 pagesCours Elm M1 MCCAbdo AbdoPas encore d'évaluation
- TP° 02 Linéarisation Autour D'un Point D'équilibreDocument15 pagesTP° 02 Linéarisation Autour D'un Point D'équilibrehassanPas encore d'évaluation
- Mod MasDocument6 pagesMod Mashakim100% (1)
- TP MCC PDFDocument20 pagesTP MCC PDFaoujilPas encore d'évaluation
- TP1 - Commande MachinesDocument2 pagesTP1 - Commande Machinespatrick bateman is literally mePas encore d'évaluation
- 1.modélisation de La MASDocument11 pages1.modélisation de La MASAbdel Illah LbkPas encore d'évaluation
- TP 2 - Mesure Directe de La Réponse Dun SystèmeDocument13 pagesTP 2 - Mesure Directe de La Réponse Dun SystèmeRachid AchitPas encore d'évaluation
- Chap1 Association Mcc-Convertisseurs Drid2020Document16 pagesChap1 Association Mcc-Convertisseurs Drid2020Mohamed BouPas encore d'évaluation
- Pfe Rapport FINALEDocument65 pagesPfe Rapport FINALELAHCEN BOUACHIKPas encore d'évaluation
- Support de Cours CHAPITRE II Modèle Mathématique Schéma Bloc Dun Système PDFDocument8 pagesSupport de Cours CHAPITRE II Modèle Mathématique Schéma Bloc Dun Système PDFTahrat ToufikPas encore d'évaluation
- IntroductionDocument10 pagesIntroductionbennoui houssem100% (1)
- TP AsservissementDocument8 pagesTP AsservissementQudýmãt ÁhmèdPas encore d'évaluation
- TP1 Commande en Boucle Ouverte de Lassociation Moteur Asynchrone-OnduleurDocument8 pagesTP1 Commande en Boucle Ouverte de Lassociation Moteur Asynchrone-OnduleurMohamed AbidPas encore d'évaluation
- These Zaamouche FaresDocument115 pagesThese Zaamouche FaresabfstbmsodPas encore d'évaluation
- Null 2Document37 pagesNull 2Youssef ElBazPas encore d'évaluation
- TP 3Document9 pagesTP 3ayat100% (1)
- Compte Rendu TP3 DIOMEDocument16 pagesCompte Rendu TP3 DIOMELandry NayirePas encore d'évaluation
- Chapitre 2 - Répartition Économique de Puissance PDFDocument18 pagesChapitre 2 - Répartition Économique de Puissance PDFMagramane AbdennourPas encore d'évaluation
- TP N°1 - Modelisation Des Convertisseurs ElectromecaniquesDocument5 pagesTP N°1 - Modelisation Des Convertisseurs ElectromecaniquesAymen HedPas encore d'évaluation
- TP Réseau 33Document17 pagesTP Réseau 33Bouaiss AymenPas encore d'évaluation
- TP #01 - Modélisation Et Simulation de MSAPDocument3 pagesTP #01 - Modélisation Et Simulation de MSAPAklil MPas encore d'évaluation
- Polycopié Commande Des Systèmes Electro-ÉnergétiquesDocument31 pagesPolycopié Commande Des Systèmes Electro-ÉnergétiquesBensalemPas encore d'évaluation
- TP Réseaux Électriques L3Document57 pagesTP Réseaux Électriques L3Nesrine BaatchiaPas encore d'évaluation
- Mge 00051Document53 pagesMge 00051أبو كعب علاء الدينPas encore d'évaluation
- Chap 3Document31 pagesChap 3أبو كعب علاء الدينPas encore d'évaluation
- TP MCCDocument14 pagesTP MCCMohamed BenalyPas encore d'évaluation
- TPN 2Document3 pagesTPN 2kololoPas encore d'évaluation
- TP 1Document7 pagesTP 1aissa bsb100% (2)
- Energie Photovoltaique-IntroductionDocument21 pagesEnergie Photovoltaique-Introductionyounes ghenam100% (1)
- Compte Rendu Électronique de PuissanceDocument10 pagesCompte Rendu Électronique de Puissanceimad el-ghayouryPas encore d'évaluation
- Commande Vectorielle D'une Machine À InductionDocument70 pagesCommande Vectorielle D'une Machine À InductionZH HamzaPas encore d'évaluation
- Etude Expérimentale D'un Hacheur ÉlévateurDocument12 pagesEtude Expérimentale D'un Hacheur ÉlévateurSam PerochonPas encore d'évaluation
- Premier - Ordre TPDocument5 pagesPremier - Ordre TPYahya MohamedPas encore d'évaluation
- LET61 - Commande Des Machines Electriques - Chapitres 1 Et 2 TD1 Et 2Document27 pagesLET61 - Commande Des Machines Electriques - Chapitres 1 Et 2 TD1 Et 2adnanPas encore d'évaluation
- Machine À Courant Continu IDocument60 pagesMachine À Courant Continu IhafidPas encore d'évaluation
- Hache UrDocument50 pagesHache UrrajaePas encore d'évaluation
- WweeDocument2 pagesWweeHicham BaghdadiPas encore d'évaluation
- CNL Adaptative MSAPDocument71 pagesCNL Adaptative MSAPhvhvyPas encore d'évaluation
- Simulation Sur Matlab D'Un Systeme D'Asservissement de Vitesse D'Une Machine A Courant ContinuDocument116 pagesSimulation Sur Matlab D'Un Systeme D'Asservissement de Vitesse D'Une Machine A Courant Continungolo shunguPas encore d'évaluation
- TP1 Systemes AsservisDocument4 pagesTP1 Systemes AsservisInventorمخترع GamerSالالعابPas encore d'évaluation
- tp°2COMMANDE VECTORILLE DIRACTEpdfDocument19 pagestp°2COMMANDE VECTORILLE DIRACTEpdfمكتبة الأمانيPas encore d'évaluation
- TD1 OnduleursDocument2 pagesTD1 OnduleurssofianePas encore d'évaluation
- Simulation Des Machines À Courant Continu Dans L PDFDocument10 pagesSimulation Des Machines À Courant Continu Dans L PDFKa AissaPas encore d'évaluation
- Chapitre II Dimensionnement Et Conceptio 2Document29 pagesChapitre II Dimensionnement Et Conceptio 2YahyaPas encore d'évaluation
- TP CommandeDocument6 pagesTP Commandevan picaboPas encore d'évaluation
- Machine À Excitation IndépendantDocument18 pagesMachine À Excitation IndépendantMhadheb Med AminePas encore d'évaluation
- TP 02 1meltiDocument4 pagesTP 02 1meltikdjgkldfjlPas encore d'évaluation
- TP 2 AnalysetemporelledessystemeslineairesDocument3 pagesTP 2 AnalysetemporelledessystemeslineairesYousra Khelfallah100% (1)
- TP MasDocument11 pagesTP MasLatifa ZizouPas encore d'évaluation
- Chapitre-I Modélisation de La MASDocument14 pagesChapitre-I Modélisation de La MASSaliha ZmPas encore d'évaluation
- TP Machine 2Document6 pagesTP Machine 2abdeslam riahiPas encore d'évaluation
- Chapitre 1: Transformations Mathématiques Pour L'étude Des Machines Électriques TournantesDocument66 pagesChapitre 1: Transformations Mathématiques Pour L'étude Des Machines Électriques TournantesLôù NàPas encore d'évaluation
- Td-Eln Analog CompletDocument10 pagesTd-Eln Analog CompletMoez YoussefPas encore d'évaluation
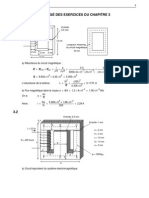
- Circuits Magnétiques ExosDocument15 pagesCircuits Magnétiques ExosZine Elabidine Moslih100% (1)
- 1981 2Document5 pages1981 2ELmokhtar HamrouniPas encore d'évaluation
- Contrôle Des Systèmes TriphasésDocument3 pagesContrôle Des Systèmes TriphasésRazan KhPas encore d'évaluation
- Cours Electronique Analog CompletDocument40 pagesCours Electronique Analog CompletMoez YoussefPas encore d'évaluation
- PB Ampli 2etage Bip Bts79Document4 pagesPB Ampli 2etage Bip Bts79Moez YoussefPas encore d'évaluation
- Commande MCCDocument20 pagesCommande MCCMoez YoussefPas encore d'évaluation
- TP N°1 MCCDocument2 pagesTP N°1 MCCMoez YoussefPas encore d'évaluation
- Onduleurs AutonomesDocument30 pagesOnduleurs Autonomesmoez youssefPas encore d'évaluation
- Chap2 HacheursDocument38 pagesChap2 Hacheursmoez youssefPas encore d'évaluation
- TD1 HacheursDocument3 pagesTD1 HacheursMoez YoussefPas encore d'évaluation
- Commande MCCDocument20 pagesCommande MCCMoez YoussefPas encore d'évaluation
- Chap1 - Introduction Electronique de Puissance PDFDocument20 pagesChap1 - Introduction Electronique de Puissance PDFMoez YoussefPas encore d'évaluation
- Commande MASDocument30 pagesCommande MASMoez YoussefPas encore d'évaluation
- Commande MASDocument30 pagesCommande MASMoez YoussefPas encore d'évaluation
- Chap1-Physique SemiconducteursDocument11 pagesChap1-Physique Semiconducteursmoez youssefPas encore d'évaluation
- Chap3-Transistors BipolairesDocument20 pagesChap3-Transistors BipolairesMoez YoussefPas encore d'évaluation
- Systèmes Logiques CombinatoiresDocument23 pagesSystèmes Logiques CombinatoiresMoez YoussefPas encore d'évaluation
- Cours Acada AutomatiqueDocument55 pagesCours Acada AutomatiqueMoez YoussefPas encore d'évaluation
- Chap2 DiodesDocument22 pagesChap2 Diodesmoez youssefPas encore d'évaluation
- Type D'argumentsDocument10 pagesType D'argumentsCharaf Adam LaasselPas encore d'évaluation
- Techniques de L'Ingénieur - Accéléromètres Inertiels PDFDocument8 pagesTechniques de L'Ingénieur - Accéléromètres Inertiels PDFdjouder nordinePas encore d'évaluation
- Correction 22Document4 pagesCorrection 22Sofien RekikPas encore d'évaluation
- 7 - Série #1Document2 pages7 - Série #1Ghizlane KarimPas encore d'évaluation
- CHP 1-5 - DiaposDocument96 pagesCHP 1-5 - DiaposFabien LucienPas encore d'évaluation
- Chapitre - 2 CMNDocument71 pagesChapitre - 2 CMNZakariae ZâamounPas encore d'évaluation
- Assoudou: Generalites Sur Les Series Temporelles ET Ajustement TendancielDocument3 pagesAssoudou: Generalites Sur Les Series Temporelles ET Ajustement Tendancielآلا ءءPas encore d'évaluation
- Micro EconomieDocument45 pagesMicro Economiealexandre-assous-567Pas encore d'évaluation
- Cours L2 BiomecaDocument196 pagesCours L2 BiomecamackytallPas encore d'évaluation
- Guide Des UV 2013-14Document213 pagesGuide Des UV 2013-14Akram Ben KhemisPas encore d'évaluation
- Corrigé Point de Mire SEC 3 PDF Mathématiques Élémentaires Enseignement Des MathématiquesDocument1 pageCorrigé Point de Mire SEC 3 PDF Mathématiques Élémentaires Enseignement Des Mathématiquesloicbarbe09Pas encore d'évaluation
- Mini Session PC 2022 02 02Document2 pagesMini Session PC 2022 02 02Youri NoghoPas encore d'évaluation
- 1-Cahier Cycle4 5e PDFDocument128 pages1-Cahier Cycle4 5e PDFkeybrrPas encore d'évaluation
- TD MQ SMP s5 Chap2 2014-15 NajibDocument2 pagesTD MQ SMP s5 Chap2 2014-15 Najibnajib spectroPas encore d'évaluation
- Exercices Maths TC International 6 1Document4 pagesExercices Maths TC International 6 1tamba vieux tolnoPas encore d'évaluation
- TD1 2021 CorrectionDocument3 pagesTD1 2021 CorrectionAnas100% (1)
- Cpa 1Document2 pagesCpa 1Kenneth KodjoPas encore d'évaluation
- Chap2-Types, Opérateurs Et ExpressionsDocument71 pagesChap2-Types, Opérateurs Et Expressionsm.azeroualPas encore d'évaluation
- Notions de Systemes Asservis PDFDocument80 pagesNotions de Systemes Asservis PDFSiéJustinDembelePas encore d'évaluation
- Serie2AN2 16-17Document2 pagesSerie2AN2 16-17Skander TmarPas encore d'évaluation
- TD Mécanique Première PartieDocument4 pagesTD Mécanique Première Partieemmanuelmayala40Pas encore d'évaluation
- FC2017 Exam ElasDocument4 pagesFC2017 Exam ElasIbrahim BenaliPas encore d'évaluation
- Sous-Épreuve E41 - BTS Bâtiment - Juin 2015 - Nouvelle Calédonie CorrigéDocument6 pagesSous-Épreuve E41 - BTS Bâtiment - Juin 2015 - Nouvelle Calédonie CorrigéMurat BasPas encore d'évaluation
- C Revision Fonctions 22-23Document30 pagesC Revision Fonctions 22-23AbdelmalkPas encore d'évaluation
- TD ConiqueDocument5 pagesTD ConiqueBertino DidahPas encore d'évaluation