Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- MAS3 - CoursDocument5 pagesMAS3 - Coursben 10Pas encore d'évaluation
- Modelisation Machine AsynchroneDocument13 pagesModelisation Machine AsynchronenaibPas encore d'évaluation
- Modelisation MASDocument14 pagesModelisation MASBelkacem NadirPas encore d'évaluation
- Chap3 Machine AsynchroneDocument41 pagesChap3 Machine AsynchroneIlyas NahiPas encore d'évaluation
- Chapitre I - MAS (Cours)Document11 pagesChapitre I - MAS (Cours)Youssef dbPas encore d'évaluation
- Machine Asynchrone TriphaséeDocument26 pagesMachine Asynchrone TriphaséekeylogPas encore d'évaluation
- MAS Cours CompletDocument39 pagesMAS Cours Completطنين نسنسPas encore d'évaluation
- Moteurs Asynchrones TriphasésDocument34 pagesMoteurs Asynchrones TriphasésMajda SerbatPas encore d'évaluation
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedPas encore d'évaluation
- Chap 5 PDFDocument14 pagesChap 5 PDFMohamed AmineeoxPas encore d'évaluation
- Exercice Machines AsynchronesDocument10 pagesExercice Machines Asynchronesfouad100% (5)
- Cours Mas Fa2026Document7 pagesCours Mas Fa2026Dile Stephen SAMBA SAMBAPas encore d'évaluation
- Chapitre II Le Moteur AsynchroneDocument12 pagesChapitre II Le Moteur AsynchroneAziz Kabore100% (1)
- Chapitre5 MASDocument10 pagesChapitre5 MASsmail chaariPas encore d'évaluation
- Machine AsynchroneDocument7 pagesMachine AsynchroneFatma Borgi Ep SaadaouiPas encore d'évaluation
- Cours - Variateur de Vitesse - MCADocument28 pagesCours - Variateur de Vitesse - MCAboutalibzinebPas encore d'évaluation
- La Machine Synchrone 3 È Année Semestre 2 2017-2018-1Document46 pagesLa Machine Synchrone 3 È Année Semestre 2 2017-2018-1TRAORE TechnologiesPas encore d'évaluation
- TD - Machine Asynchrone.2012Document4 pagesTD - Machine Asynchrone.2012homeeestudyyyPas encore d'évaluation
- Commande MCCDocument23 pagesCommande MCCKesraoui HichemPas encore d'évaluation
- Variation de Vitesse Des Moteurs ÉlectriquesDocument44 pagesVariation de Vitesse Des Moteurs ÉlectriquesmaronnamPas encore d'évaluation
- MAS 3phDocument23 pagesMAS 3phabdelwahad100% (1)
- MasDocument16 pagesMasSôûLãymãne BénPas encore d'évaluation
- Chapitre 2-1Document10 pagesChapitre 2-1Oussama JaafariPas encore d'évaluation
- Cours: Machine Asynchrone: I-Généralités 1 - DéfinitionDocument10 pagesCours: Machine Asynchrone: I-Généralités 1 - DéfinitionFatiPas encore d'évaluation
- Modélisation de La Génératrice AsynchroneDocument33 pagesModélisation de La Génératrice AsynchroneLaila JamilPas encore d'évaluation
- Cours MAS RésuméDocument7 pagesCours MAS RésuméMak HimPas encore d'évaluation
- Cours Moteur AsynchroneDocument7 pagesCours Moteur AsynchroneOmar Ait gabPas encore d'évaluation
- Moteur Asynchrone Triphasé: 1. Constitution Et Principe de FonctionnementDocument7 pagesMoteur Asynchrone Triphasé: 1. Constitution Et Principe de Fonctionnementhassna ait aliPas encore d'évaluation
- 7-Cours Asynchrone EEADocument21 pages7-Cours Asynchrone EEAyassin akkninnPas encore d'évaluation
- Machines SynchronesDocument39 pagesMachines SynchronesSamroura Yessad100% (1)
- 2F.C22 - Machine À Courant ContinuDocument5 pages2F.C22 - Machine À Courant ContinuUmar MuhammetPas encore d'évaluation
- TD MasDocument4 pagesTD MasGbah KONEPas encore d'évaluation
- Etude Machine Asynchrone TriphaseDocument5 pagesEtude Machine Asynchrone TriphaseRomiald Noussi SohPas encore d'évaluation
- Cours Machine AsynchroneDocument28 pagesCours Machine AsynchroneMeryem El MennaouyPas encore d'évaluation
- Moteur Asynchrone MonophaséDocument7 pagesMoteur Asynchrone Monophasélamia lamiaPas encore d'évaluation
- Machine AsynchroneDocument8 pagesMachine AsynchroneZakariae ElPas encore d'évaluation
- Mini ProjetDocument13 pagesMini ProjetHoussine Gue100% (3)
- TP MasDocument9 pagesTP MasDjalal Eddine HammachiPas encore d'évaluation
- Machine Tournante À Courant AlternatifDocument6 pagesMachine Tournante À Courant AlternatifSofiane HAMCHAOUIPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- Machines CCDocument12 pagesMachines CCGautier MagnierPas encore d'évaluation
- 08_moteur_synchDocument6 pages08_moteur_synchmathis.morinPas encore d'évaluation
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantPas encore d'évaluation
- Moteur Asynchrone TriphaseDocument18 pagesMoteur Asynchrone TriphaseGana83% (6)
- Cours MCC 4e-BS2 2022Document19 pagesCours MCC 4e-BS2 2022Abdoulaye baPas encore d'évaluation
- 02 Moteur AsynchroneDocument11 pages02 Moteur AsynchroneLebel NkogoPas encore d'évaluation
- Machine Asynchrone TolotraDocument11 pagesMachine Asynchrone TolotraManoaPas encore d'évaluation
- TP01commandeF (Enregistré Automatiquement) PDFDocument9 pagesTP01commandeF (Enregistré Automatiquement) PDFKhouloud BoukhechimaPas encore d'évaluation
- Cours8 Modèle MASDocument26 pagesCours8 Modèle MASKamal PcPas encore d'évaluation
- TD N°4-AutoDocument10 pagesTD N°4-AutoSamira 1986Pas encore d'évaluation
- Machines Synchrones Et AsynchronesDocument18 pagesMachines Synchrones Et AsynchronesbenhabriaPas encore d'évaluation
- Cours Des Moteurs AsynchronesDocument40 pagesCours Des Moteurs AsynchronesBALLOUK Soufiane100% (5)
- Cours - Mas Mon ResumeDocument39 pagesCours - Mas Mon ResumeAZIZ81936Pas encore d'évaluation
- SaadiDocument14 pagesSaadiZakaria MaazazPas encore d'évaluation
- Ma DiapoDocument20 pagesMa Diapoglavanny cherel OLENDEPas encore d'évaluation
- PlanDocument2 pagesPlanglavanny cherel OLENDEPas encore d'évaluation
- Mon Planing de MaintenanceDocument2 pagesMon Planing de Maintenanceglavanny cherel OLENDEPas encore d'évaluation
- PR Ése Ntation 1Document1 pagePR Ése Ntation 1glavanny cherel OLENDEPas encore d'évaluation
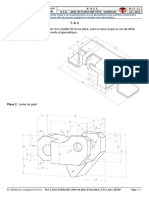
- M.I.2 - DAO Solidworks - Mise en Plan D'une Pièce - T.D.2 - Janv.2019Document1 pageM.I.2 - DAO Solidworks - Mise en Plan D'une Pièce - T.D.2 - Janv.2019glavanny cherel OLENDEPas encore d'évaluation
- Genie ElectriqueDocument58 pagesGenie Electriqueglavanny cherel OLENDEPas encore d'évaluation
- Équipement Réparable A ModifierDocument3 pagesÉquipement Réparable A Modifierglavanny cherel OLENDEPas encore d'évaluation
- Mon Projet D EtudeDocument31 pagesMon Projet D Etudeglavanny cherel OLENDEPas encore d'évaluation
- Retour Sur Le Stage Ouvrier OLENDE - CopieDocument23 pagesRetour Sur Le Stage Ouvrier OLENDE - Copieglavanny cherel OLENDEPas encore d'évaluation
- Retour Sur Le Stage Technicien OLENDEDocument19 pagesRetour Sur Le Stage Technicien OLENDEglavanny cherel OLENDEPas encore d'évaluation
- Ma DiapoDocument20 pagesMa Diapoglavanny cherel OLENDEPas encore d'évaluation
- QW 3132Document165 pagesQW 3132zandePas encore d'évaluation
- Tension SuperficielleDocument14 pagesTension SuperficielleALLOLO100% (1)
- Concours General 2017 PC-CDocument10 pagesConcours General 2017 PC-CEric LefrançaisPas encore d'évaluation
- Reduction D Endomorphismes Corrige Niveau 2Document13 pagesReduction D Endomorphismes Corrige Niveau 2Kenneth KodjoPas encore d'évaluation
- Travaux Diriges Sur Les Fonctions NumeriquesDocument2 pagesTravaux Diriges Sur Les Fonctions Numeriquesarmelo simbePas encore d'évaluation
- Familles Sommables-4Document16 pagesFamilles Sommables-4Sam ManiPas encore d'évaluation
- Fiche de TD N 7Document4 pagesFiche de TD N 7Saad TaibiPas encore d'évaluation
- Moulay Ismail 2 PDFDocument4 pagesMoulay Ismail 2 PDFmarwaneeeePas encore d'évaluation
- Chapitre 2 CRMDocument15 pagesChapitre 2 CRMOussama AbirPas encore d'évaluation
- A Propos Des Groupes Algébriques Semi-SimplesDocument13 pagesA Propos Des Groupes Algébriques Semi-SimplesjeamichelPas encore d'évaluation
- Analyse FonctionnelleDocument32 pagesAnalyse Fonctionnellesouhail100% (3)
- Examen VOM 2019 SE2Document3 pagesExamen VOM 2019 SE2Mohammedlamine MEZIOUDPas encore d'évaluation
- AF3601 - Techniques de L'ingénieur - Verres - Propriétés Et ApplicationsDocument19 pagesAF3601 - Techniques de L'ingénieur - Verres - Propriétés Et ApplicationsKhawla RafPas encore d'évaluation
- TheseDocument211 pagesTheselopir120Pas encore d'évaluation
- Note de Calcul Support Tuyautrie ExecutionDocument12 pagesNote de Calcul Support Tuyautrie ExecutionMed Samai100% (2)
- ELM Leblanc AxeliaDocument12 pagesELM Leblanc AxeliaWalid Aouini80% (5)
- BUT1 Transformee Laplace ArticleDocument4 pagesBUT1 Transformee Laplace ArticleBenPas encore d'évaluation
- Calcul Différentiel - Dérivées Partielles de Fonctions ComposéesDocument5 pagesCalcul Différentiel - Dérivées Partielles de Fonctions Composéesselmi040589Pas encore d'évaluation
- Traitement Et Épuration de Leau L3 HydDocument370 pagesTraitement Et Épuration de Leau L3 HydSidahmed Ramzi100% (4)
- Untitled 1Document2 pagesUntitled 1zhiwaPas encore d'évaluation
- Cours de Mécanique - Exerci...Document4 pagesCours de Mécanique - Exerci...Parfait KoudjouPas encore d'évaluation
- Pcsi5 TD15Document4 pagesPcsi5 TD15Saad MountassirPas encore d'évaluation
- CavitationDocument17 pagesCavitationDODOHICHAM50% (2)
- IssaadiThinhinene SaadMDocument67 pagesIssaadiThinhinene SaadMAymen BenguessoumPas encore d'évaluation
- La Fabrication Des Composants en Verre OptiqueDocument4 pagesLa Fabrication Des Composants en Verre OptiquebouxPas encore d'évaluation
- Sujet Bac 23 Polynésie p3 49Document1 pageSujet Bac 23 Polynésie p3 49Shreck N'rollPas encore d'évaluation
- Cours 2022 Lmeca1855Document3 pagesCours 2022 Lmeca1855azfghyPas encore d'évaluation
- Projet 0111Document29 pagesProjet 0111Abdou DigaPas encore d'évaluation
- Rapport PFE - Bezerra Cotias Dos Santos, MikaelDocument25 pagesRapport PFE - Bezerra Cotias Dos Santos, MikaelMikael Bezerra Cotias Dos SantosPas encore d'évaluation