Vous aimerez peut-être aussi
- MQ1 TDC Schrodinger LibreDocument15 pagesMQ1 TDC Schrodinger LibreallabryanzePas encore d'évaluation
- Correction de La Série de TD n1 - MATH3Document15 pagesCorrection de La Série de TD n1 - MATH3lydiiia bPas encore d'évaluation
- Correction Ex1 Et Enoncé Ex2 Fem 2d (1)Document4 pagesCorrection Ex1 Et Enoncé Ex2 Fem 2d (1)yowa19nPas encore d'évaluation
- TP 3 Phy 3Document13 pagesTP 3 Phy 3hbelalouiPas encore d'évaluation
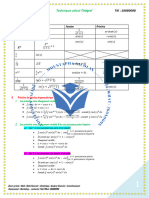
- Collection Validé Tél: 26080098: Technique CalculDocument7 pagesCollection Validé Tél: 26080098: Technique CalculMoustapha NicolasPas encore d'évaluation
- Essai de FlexionDocument15 pagesEssai de FlexionISMAIL EL KHADDARPas encore d'évaluation
- Traqueur Du Soleil (Corrigé)Document5 pagesTraqueur Du Soleil (Corrigé)bhasalma220Pas encore d'évaluation
- Solution D'examDocument4 pagesSolution D'examJalal TiYalPas encore d'évaluation
- TD1 - Physique Des Vibrations - CorrectionDocument7 pagesTD1 - Physique Des Vibrations - CorrectionMdzayd EL FahimePas encore d'évaluation
- Expose Algebre 5Document11 pagesExpose Algebre 5Harp SilvanoPas encore d'évaluation
- Série Corrigés Sur Les Couples Continues ÉtudiantsDocument9 pagesSérie Corrigés Sur Les Couples Continues ÉtudiantsDrissi Chihab81% (16)
- Fonctions Exponentielles Cours 2Document7 pagesFonctions Exponentielles Cours 2Amine SemlaliPas encore d'évaluation
- Index - 2023-12-14T191750.913Document1 pageIndex - 2023-12-14T191750.913Yaniss RadiPas encore d'évaluation
- Fonctions Logarithmiques CoursDocument7 pagesFonctions Logarithmiques CoursAmine SemlaliPas encore d'évaluation
- MQ2 TDC Schrodinger PotentielDocument16 pagesMQ2 TDC Schrodinger PotentielallabryanzePas encore d'évaluation
- Solution Examen 20-2 1Document3 pagesSolution Examen 20-2 1FaroukPas encore d'évaluation
- CH10 Oscillateur Energie AmortissementDocument13 pagesCH10 Oscillateur Energie AmortissementJagoda PasikowskaPas encore d'évaluation
- Serie 5Document1 pageSerie 5redouane.boulerouahPas encore d'évaluation
- TD 5 Base Des Regles Et Inference Floues Avec Solution PartielleDocument3 pagesTD 5 Base Des Regles Et Inference Floues Avec Solution PartiellechihaPas encore d'évaluation
- Examen6 Analyse 4 SMA3Document3 pagesExamen6 Analyse 4 SMA3Tizirii AdouamaPas encore d'évaluation
- Variables Aleatoires Continues TDDocument6 pagesVariables Aleatoires Continues TDjoséphin sylvèrePas encore d'évaluation
- Solution ExamenDocument3 pagesSolution Examenmohamed faresPas encore d'évaluation
- La Marche Aléatoire TIPE T PDFDocument5 pagesLa Marche Aléatoire TIPE T PDFYoussef El FahimePas encore d'évaluation
- 1-Pertes de Précontrainte-HamidoDocument3 pages1-Pertes de Précontrainte-Hamidofarahabdel42Pas encore d'évaluation
- TD4 Cinã©matiqueDocument2 pagesTD4 Cinã©matiqueSaad JebbariPas encore d'évaluation
- Bac C Corrige Mathemathiques 2012Document7 pagesBac C Corrige Mathemathiques 2012AaudrylPas encore d'évaluation
- TD Série 3Document16 pagesTD Série 3Drissi Chihab100% (5)
- MSE PartieII Chap1Document9 pagesMSE PartieII Chap1Illya Haladou Danja IchaouPas encore d'évaluation
- 1-Résumé de Cours Corde VibranteDocument2 pages1-Résumé de Cours Corde VibranteMacoc YoutubePas encore d'évaluation
- Corrigé TD3 - 2021 2022Document13 pagesCorrigé TD3 - 2021 2022saidihakima87Pas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2Sara SmithPas encore d'évaluation
- Chapitre 4 PHDocument8 pagesChapitre 4 PHDib YassinPas encore d'évaluation
- Corrigé 05 PDFDocument2 pagesCorrigé 05 PDFEl Kamoun AminePas encore d'évaluation
- Fastef 2020 - Epreuve Mathematique-F1c1 MPCDocument2 pagesFastef 2020 - Epreuve Mathematique-F1c1 MPCSeydina WadePas encore d'évaluation
- 2 - Plan Incliné-1Document27 pages2 - Plan Incliné-1Tat pqtPas encore d'évaluation
- Optimisation Sans ContraintesDocument7 pagesOptimisation Sans ContraintesWarPas encore d'évaluation
- Corrigé CC1-1 Reseaux ElectriqueDocument7 pagesCorrigé CC1-1 Reseaux Electriquemohamedhoussam62Pas encore d'évaluation
- TP 1Document6 pagesTP 1AzOu DzPas encore d'évaluation
- Annabac 2019 Maths Serie S Exercice1Document3 pagesAnnabac 2019 Maths Serie S Exercice1Le Monde80% (5)
- Fiche Résumé Analyse Complexe (Niveau L3)Document2 pagesFiche Résumé Analyse Complexe (Niveau L3)SuperChocolatPas encore d'évaluation
- Les dérivées - cours première spéDocument5 pagesLes dérivées - cours première spécaroline.maestra2bPas encore d'évaluation
- SN°4 MFluidesDocument7 pagesSN°4 MFluidesrachida lakaazPas encore d'évaluation
- 21 - Loi NormaleDocument9 pages21 - Loi Normalesalahbouch55556Pas encore d'évaluation
- Moment CinétiqueDocument16 pagesMoment CinétiqueDora BoraPas encore d'évaluation
- Cour Complet Oscillations Forcées 1DDLDocument5 pagesCour Complet Oscillations Forcées 1DDLAnya Hernafi100% (1)
- Optimisation 2Document7 pagesOptimisation 2Wiem MelkiPas encore d'évaluation
- TAF 3 Calcul Dynamique - Watsop Piankeu Noel - 16G03301 PDFDocument9 pagesTAF 3 Calcul Dynamique - Watsop Piankeu Noel - 16G03301 PDFwatsopPas encore d'évaluation
- Cours Math 3 en ProgressionDocument19 pagesCours Math 3 en Progressionfazfrito lacaviataPas encore d'évaluation
- 5-Derivation (Terminale SM)Document3 pages5-Derivation (Terminale SM)Aymane KechnaPas encore d'évaluation
- Sujet_corrige_CC_Analyse3_18-19Document4 pagesSujet_corrige_CC_Analyse3_18-19kyjcwyzs6hPas encore d'évaluation
- Ta4 Fonction LogarithmeDocument4 pagesTa4 Fonction LogarithmeCrepin BAKATRAPas encore d'évaluation
- Dérivés Et PrimitivesDocument8 pagesDérivés Et PrimitivesDjeti LabantePas encore d'évaluation
- Fonctions Logarithmiques: I) La Fonction Logarithme NeperienneDocument7 pagesFonctions Logarithmiques: I) La Fonction Logarithme NeperienneMamadou Thioye100% (1)
- TD Sur La Fonction Exponentielle PDFDocument7 pagesTD Sur La Fonction Exponentielle PDFZogoPas encore d'évaluation
- Chap6 Formulaire (Flèches) PDFDocument4 pagesChap6 Formulaire (Flèches) PDFWalid PhénixPas encore d'évaluation
- Evaluation 1Document2 pagesEvaluation 1eljani aminPas encore d'évaluation
- Chap. II - Dép. Poutres Sym. en Flex PlaneDocument25 pagesChap. II - Dép. Poutres Sym. en Flex Planehouhou mohamedPas encore d'évaluation
- Solution de La 5 Eme SerieDocument6 pagesSolution de La 5 Eme SerieSirinaPas encore d'évaluation
- Solution D'exercice: A) B) A) B) C) D)Document3 pagesSolution D'exercice: A) B) A) B) C) D)adil kasmiPas encore d'évaluation
- GS Livret D'accompagnement Pour Les Livrets Et Fiches D'exercices "La Vie Est Belle"Document90 pagesGS Livret D'accompagnement Pour Les Livrets Et Fiches D'exercices "La Vie Est Belle"Denis de RivoyrePas encore d'évaluation
- Introduction A La Science PolitiqueDocument4 pagesIntroduction A La Science PolitiqueHürrem KIPIRTIPas encore d'évaluation
- Introduction R La Politique PDFDocument19 pagesIntroduction R La Politique PDFNeniita Sheyla TroyaPas encore d'évaluation
- Devoirs Des Parents Et Des Enfants Musulmans - Akhou Wadiour Ak Akhou Doome Ci L'islamDocument8 pagesDevoirs Des Parents Et Des Enfants Musulmans - Akhou Wadiour Ak Akhou Doome Ci L'islamBoubacar BahPas encore d'évaluation
- À Vos Marques, Prêts, Partez !Document27 pagesÀ Vos Marques, Prêts, Partez !Abdessamade EloufiPas encore d'évaluation
- TP 1Document2 pagesTP 1Khaled LahianiPas encore d'évaluation
- R 000600Document71 pagesR 000600sghyarPas encore d'évaluation
- Alispach 1 ADocument15 pagesAlispach 1 AFélix BangouraPas encore d'évaluation
- Bassoudi SAADIA1-2023Document4 pagesBassoudi SAADIA1-2023bassoudi mohamedPas encore d'évaluation
- Actualités BTP: Vivification de L'eau GranderDocument2 pagesActualités BTP: Vivification de L'eau GranderGeorgieHPas encore d'évaluation
- Les Fonctions Du Roman-1-1Document6 pagesLes Fonctions Du Roman-1-1Herman Malou95% (20)
- Sequences Pedagogiques Bois CompletesDocument44 pagesSequences Pedagogiques Bois CompletesSalah BoussettaPas encore d'évaluation
- Devoir de Contrôle 1AS Lycée Pilote by Galaï Abdelhamid Avec Correction PDFDocument5 pagesDevoir de Contrôle 1AS Lycée Pilote by Galaï Abdelhamid Avec Correction PDFAnis DahnenPas encore d'évaluation
- Math PS A4 MaternelleDocument41 pagesMath PS A4 MaternelleKOUAKOUPas encore d'évaluation
- Belleville 1Document146 pagesBelleville 1Anastasiya Vinokurova100% (1)
- Choix Auxiliaire FLEDocument47 pagesChoix Auxiliaire FLESite Commune LanguePas encore d'évaluation
- Cours - Arbre Des CausesDocument8 pagesCours - Arbre Des CausesSarah PuigPas encore d'évaluation
- Cours ACMDocument15 pagesCours ACMmouloud hadbiiPas encore d'évaluation
- Le Vrai But de La Douleur Dans La Route de ChlifaDocument2 pagesLe Vrai But de La Douleur Dans La Route de Chlifaapi-540531646Pas encore d'évaluation
- Frances VerbosDocument5 pagesFrances VerbosWilfrido CampechanoPas encore d'évaluation
- Biographie Charles Baudelaire PDFDocument4 pagesBiographie Charles Baudelaire PDFlujanvalPas encore d'évaluation
- La Société Terminale 1. Communautés VirtuellesDocument366 pagesLa Société Terminale 1. Communautés VirtuellesSchmoll PatrickPas encore d'évaluation
- XXDocument5 pagesXXFernando Solana Clemente100% (1)