Vous aimerez peut-être aussi
- TD1Document2 pagesTD1Möräđ ÄbPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1Pas encore d'évaluation
- Cours Mécanique Statique-1Document47 pagesCours Mécanique Statique-1AYADI IMEDPas encore d'évaluation
- Cours MMC VF UcaoDocument133 pagesCours MMC VF UcaonarcissePas encore d'évaluation
- Galilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsD'EverandGalilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsPas encore d'évaluation
- Expose Sur L'electromagnetismeDocument17 pagesExpose Sur L'electromagnetismedjetouPas encore d'évaluation
- Université Ibn Tofail Faculté Des Sciences Département de Physique KénitraDocument83 pagesUniversité Ibn Tofail Faculté Des Sciences Département de Physique KénitraRedouane RedaPas encore d'évaluation
- Exercice CapteurDocument7 pagesExercice CapteurDjamel BENNOUR100% (1)
- Serie2 CorrectionDocument8 pagesSerie2 CorrectionNayoPas encore d'évaluation
- TD Prob - Stat Gc1 Gtr1Document4 pagesTD Prob - Stat Gc1 Gtr1romain fokamPas encore d'évaluation
- Serie 2Document2 pagesSerie 2Brahim MouhcinePas encore d'évaluation
- TD Serie3Document4 pagesTD Serie3Nowe AhmadePas encore d'évaluation
- Fonctions Eulérienne PDFDocument28 pagesFonctions Eulérienne PDFAzize RazamPas encore d'évaluation
- Corrige Gradateur 1415Document4 pagesCorrige Gradateur 1415Hamza DarrarPas encore d'évaluation
- Conversion ELM D'énergie-1.1.Document17 pagesConversion ELM D'énergie-1.1.Amina GuenadezPas encore d'évaluation
- Chap III Tenseur DéformationDocument17 pagesChap III Tenseur DéformationmomoPas encore d'évaluation
- Poly6 TD MQ s5Document32 pagesPoly6 TD MQ s5BadrEddinPas encore d'évaluation
- Compte RenduDocument23 pagesCompte RenduMouhcine Ben MoussaPas encore d'évaluation
- Laplace InverseDocument2 pagesLaplace Inversehmdaoui anass100% (1)
- Ocs I LateurDocument11 pagesOcs I LateurMohamed FoudalPas encore d'évaluation
- Rapport tp1 Electronique - Final PDFDocument63 pagesRapport tp1 Electronique - Final PDFJoel Ema'a100% (1)
- Série 3+corrigéDocument4 pagesSérie 3+corrigéAli AyadPas encore d'évaluation
- Cours Physique Experimentale 2018 V5Document47 pagesCours Physique Experimentale 2018 V5eloijonathan0Pas encore d'évaluation
- 5 Electrostatique Des Milieux DiéléctriquesDocument42 pages5 Electrostatique Des Milieux DiéléctriquesMed Aithida0% (1)
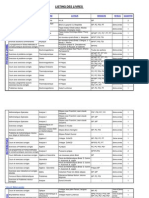
- Livres de La BibiloDocument4 pagesLivres de La BibiloKaoutar Kabbaj0% (1)
- Examen 2012 CorrigeDocument3 pagesExamen 2012 CorrigeIssam Mob0% (1)
- TD1-Enoncé - Stat - S5 20-21Document2 pagesTD1-Enoncé - Stat - S5 20-21Mohamed FoudalPas encore d'évaluation
- MN LiDocument63 pagesMN Limoha68100% (2)
- Algebre TensorielleDocument78 pagesAlgebre TensorielleAntonio RamirezPas encore d'évaluation
- MQII-Série 2 - 2014-15Document4 pagesMQII-Série 2 - 2014-15Ayoub VbPas encore d'évaluation
- Math IV Les Fonctions SpécialesDocument55 pagesMath IV Les Fonctions SpécialesEl-Kaber HachemPas encore d'évaluation
- Examen PR-2015-MMC ENIBDocument3 pagesExamen PR-2015-MMC ENIBZied AbidiPas encore d'évaluation
- Exercices V.A.Document7 pagesExercices V.A.diarrassouba kolotielomaPas encore d'évaluation
- Résumé Chapitre 1Document2 pagesRésumé Chapitre 1Essyl SAIDIPas encore d'évaluation
- Sujets D'électrostatique EEREM2Document7 pagesSujets D'électrostatique EEREM2mouradgourmajPas encore d'évaluation
- Mathématiques Appliquées, Chapitre 2Document19 pagesMathématiques Appliquées, Chapitre 2Abdelkader Faklani DouPas encore d'évaluation
- Meth NumDocument79 pagesMeth NumCapitno PhilipPas encore d'évaluation
- Thème: Analyse Et Amélioration de La Qualité de L'énergie ÉlectriqueDocument97 pagesThème: Analyse Et Amélioration de La Qualité de L'énergie Électriquesarray rawdhaPas encore d'évaluation
- cours-EM 2020-pdfDocument86 pagescours-EM 2020-pdfAshraaf Mknsi100% (1)
- Méthode Des Différences Finies Pour Les EDP Stationnaires PDFDocument16 pagesMéthode Des Différences Finies Pour Les EDP Stationnaires PDFحسام جدوPas encore d'évaluation
- Examen National Physique Chimie Sciences Maths 2017 Normale CorrigeDocument9 pagesExamen National Physique Chimie Sciences Maths 2017 Normale Corrigeel ghazi benrrabhiPas encore d'évaluation
- Cours MG + TDDocument44 pagesCours MG + TDdido100% (1)
- Cours Mécanique Quantique SMP s4Document44 pagesCours Mécanique Quantique SMP s4Staphanie MelPas encore d'évaluation
- GE-Hakim Ait Said-Electrotechnique industrielle-TP3 - Matériaux magnétiques-L3-S6Document2 pagesGE-Hakim Ait Said-Electrotechnique industrielle-TP3 - Matériaux magnétiques-L3-S6Rabah AmidiPas encore d'évaluation
- Rapport BenbouyaDocument15 pagesRapport BenbouyaMehdi El BaziPas encore d'évaluation
- RDM-Emna AMAIEDDocument60 pagesRDM-Emna AMAIEDemna amaiedPas encore d'évaluation
- PolyTD EDP PDFDocument30 pagesPolyTD EDP PDFFatima EzzahraPas encore d'évaluation
- Electrostatique ElectrocinetiqueDocument95 pagesElectrostatique Electrocinetiqueabdelhakim100% (1)
- Exercices Circuits Analogiques Pf3Document70 pagesExercices Circuits Analogiques Pf3loic youmssiPas encore d'évaluation
- Banque PT 2000Document7 pagesBanque PT 2000Abderrahim Ouakki100% (1)
- Chapitre I ElectrostatiqueDocument42 pagesChapitre I ElectrostatiqueEng. NKURUNZIZA ApollinairePas encore d'évaluation
- Exercices Sur Réseaux Triphasés 2 Bac Science DingenieurDocument7 pagesExercices Sur Réseaux Triphasés 2 Bac Science DingenieurIbrahim HerrazPas encore d'évaluation
- CNC MP 2017 Chimie Corrige PDFDocument21 pagesCNC MP 2017 Chimie Corrige PDFYassir Sadiq ElfilaliPas encore d'évaluation
- Exercices Résolus de Physique QuantiaueDocument68 pagesExercices Résolus de Physique QuantiaueZakari Yae100% (2)
- Exercices Electro 2eme Annee2002Document16 pagesExercices Electro 2eme Annee2002Kouchad FouadPas encore d'évaluation
- 05 2nde P Chapitre 5 Refraction Et Dispersion de La LumiereDocument13 pages05 2nde P Chapitre 5 Refraction Et Dispersion de La LumiereAnas Kerty100% (1)
- Cours Actionneurs FluidiquesDocument45 pagesCours Actionneurs FluidiquesAnas Kerty100% (1)
- Cours Actionneurs Hydrauliques PDFDocument17 pagesCours Actionneurs Hydrauliques PDFAnas KertyPas encore d'évaluation
- RedresseurDocument23 pagesRedresseurAnas Kerty50% (4)
- Cours Actionneurs FluidiquesDocument45 pagesCours Actionneurs FluidiquesAnas Kerty100% (1)
- Moteurs Electrique ShuntDocument14 pagesMoteurs Electrique ShuntAnas KertyPas encore d'évaluation
- 4 Etude de Cas Systemes HydroliqueDocument23 pages4 Etude de Cas Systemes Hydroliquesalma_herriPas encore d'évaluation
- F213 TD Corrigés PDFDocument102 pagesF213 TD Corrigés PDFYoussef BouhiaPas encore d'évaluation
- DauphinDocument48 pagesDauphinAnas KertyPas encore d'évaluation
- Les Circuits MagnétiquesDocument33 pagesLes Circuits MagnétiquesAnas KertyPas encore d'évaluation
- Comportement Mecanique Des MateriauxDocument60 pagesComportement Mecanique Des MateriauxAnas Kerty0% (2)
- Géométrie Des ProfilsDocument46 pagesGéométrie Des ProfilsAnas Kerty100% (2)
- Ch1RoleDuSI1 4ModeleRDocument30 pagesCh1RoleDuSI1 4ModeleRuriel johnnyPas encore d'évaluation
- Chapitre3 Calcul Courant Defaut 5emeanneepdfDocument23 pagesChapitre3 Calcul Courant Defaut 5emeanneepdfminoungou constantPas encore d'évaluation
- Modèle D'estimation Des Coûts Des Assemblages SoudésDocument7 pagesModèle D'estimation Des Coûts Des Assemblages SoudésZackaria El IdrissiPas encore d'évaluation
- Simulation Et Etude Des Caractéristique Electronique D'un Contact Metalsemi-Conducteur Base Du GaAs PDFDocument81 pagesSimulation Et Etude Des Caractéristique Electronique D'un Contact Metalsemi-Conducteur Base Du GaAs PDFwardaPas encore d'évaluation
- POO CoursDocument37 pagesPOO CoursShay MaePas encore d'évaluation
- Carte D'accès À La Nouvelle Déchetterie de ChétrozDocument1 pageCarte D'accès À La Nouvelle Déchetterie de ChétrozAnonymous XmyP996UD9Pas encore d'évaluation
- La Collision ContinentaleDocument17 pagesLa Collision ContinentaleAyoub FaPas encore d'évaluation
- Généaralités Sur Les Solutions Et Les SolvantsDocument18 pagesGénéaralités Sur Les Solutions Et Les SolvantsBsissaSoltaniPas encore d'évaluation
- Modélisation 2022 2023Document38 pagesModélisation 2022 2023elammaryibtissam777Pas encore d'évaluation
- Chapitre IX Cours Eleves 2022 2023Document5 pagesChapitre IX Cours Eleves 2022 2023mathieu.demange13Pas encore d'évaluation
- TD 2018 ConductionDocument1 pageTD 2018 ConductionElleonore Gla100% (1)
- 01 Cours AutomateDocument15 pages01 Cours AutomateBrahim Bakhach100% (1)
- DS Probabilites Suites PDFDocument1 pageDS Probabilites Suites PDFSaid MoradPas encore d'évaluation
- CoursDocument76 pagesCoursAnissa Haj AbdallahPas encore d'évaluation
- Mise en Oeuvre Du Clustering À Basculement Avec Hyper-V 2012 - Hyper-V - IT-Connect PDFDocument7 pagesMise en Oeuvre Du Clustering À Basculement Avec Hyper-V 2012 - Hyper-V - IT-Connect PDFboubizPas encore d'évaluation
- U41 Nc2019 Dossier Corrige CopieDocument17 pagesU41 Nc2019 Dossier Corrige CopieFadwa GHANIPas encore d'évaluation
- Atelier 2Document5 pagesAtelier 2GANG SHOOTPas encore d'évaluation
- SYN - EN.TO. MATH 6èmeDocument138 pagesSYN - EN.TO. MATH 6èmeDieudonné soleil soleil100% (1)
- FiltreDocument15 pagesFiltreaya.mannaiPas encore d'évaluation
- BiochimieDocument11 pagesBiochimieAbdennour FishermanPas encore d'évaluation
- m7 Dessin A Main LeveeDocument38 pagesm7 Dessin A Main LeveeDon YassinePas encore d'évaluation
- Echecs ChirurgieDocument116 pagesEchecs ChirurgietiphainenoePas encore d'évaluation
- TP001 - Wildfly8Document3 pagesTP001 - Wildfly8Sarrah HoussemPas encore d'évaluation
- Cellule MT Étanche: Cellule Rmu Compact À Fusibles Uring-24 LLFDocument9 pagesCellule MT Étanche: Cellule Rmu Compact À Fusibles Uring-24 LLFFati FatinePas encore d'évaluation
- Gas Turbines FrenchDocument1 pageGas Turbines FrenchDebcha DebchaouiPas encore d'évaluation
- 3M210 TD4corDocument4 pages3M210 TD4corSoufiane MajdPas encore d'évaluation
- La Methodologie Detude Evenement 2022 AoutDocument9 pagesLa Methodologie Detude Evenement 2022 AoutAhmed SerrarPas encore d'évaluation
- Transistors A Effet de Champ Cours 01Document14 pagesTransistors A Effet de Champ Cours 01ato ndongo fabricePas encore d'évaluation
- IkhtisaratDocument2 pagesIkhtisaratEl Amrani LailaPas encore d'évaluation
- En Iso 14175Document15 pagesEn Iso 14175barbierPas encore d'évaluation
- The Game: Penetrating the Secret Society of Pickup ArtistsD'EverandThe Game: Penetrating the Secret Society of Pickup ArtistsÉvaluation : 4 sur 5 étoiles4/5 (131)
- Proof of Heaven: A Neurosurgeon's Journey into the AfterlifeD'EverandProof of Heaven: A Neurosurgeon's Journey into the AfterlifeÉvaluation : 3.5 sur 5 étoiles3.5/5 (165)
- Secrets of the Millionaire Mind: Mastering the Inner Game of WealthD'EverandSecrets of the Millionaire Mind: Mastering the Inner Game of WealthÉvaluation : 4.5 sur 5 étoiles4.5/5 (197)
- New Zealand Adventure Travel GuideD'EverandNew Zealand Adventure Travel GuideÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Jamaica: A Guide to the Food & RestaurantsD'EverandJamaica: A Guide to the Food & RestaurantsÉvaluation : 4 sur 5 étoiles4/5 (1)
- Coastal Alaska & the Inside Passage Adventure Travel GuideD'EverandCoastal Alaska & the Inside Passage Adventure Travel GuidePas encore d'évaluation
- Geneva, Lausanne, Fribourg & Western Switzerland Travel AdventuresD'EverandGeneva, Lausanne, Fribourg & Western Switzerland Travel AdventuresPas encore d'évaluation
- Hollywood & the Best of Los Angeles Travel GuideD'EverandHollywood & the Best of Los Angeles Travel GuideÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)