Académique Documents
Professionnel Documents
Culture Documents
Science Ingenieur
Science Ingenieur
Transféré par
baltazak36Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Science Ingenieur
Science Ingenieur
Transféré par
baltazak36Droits d'auteur :
Formats disponibles
SCIENCES DE L'INGENIEUR
P
P
r
r
e
e
m
m
i
i
r
r
e
e
a
a
n
n
n
n
e
e
d
d
u
u
c
c
y
y
c
c
l
l
e
e
d
d
e
e
B
B
a
a
c
c
c
c
a
a
l
l
a
a
u
u
r
r
a
a
t
t
Sciences et Technologies lectriques (ST)
LES AUTEURS
EL MIMOUNI EL HASSAN
Inspecteur de Gnie Electrique
HANAFI AHMED
Professeur d'Electronique
LAJOUAD RACHID
Professeur agrg de Gnie Electrique
RMICHA ABDELHAY
Professeur de Construction Mcanique
JEMILY ABDELGHANI
Professeur de Fabrication mcanique
ERRAHOUTI ALI
Professeur d'Electronique
MOUJIBI KAMAL
Professeur de Construction Mcanique
Cher lecteur,
Comme pour les autres matires d'enseignement, le ministre de lducation
nationale, de l'enseignement suprieur, de la formation des cadres et de la
recherche scientifique a organis un concours pour le manuel scolaire des Sciences
de lingnieur de la 1ere STE.
Ce projet d'ouvrage, est le rsultat de la participation ce concours dont le
nombre de candidats tait de 2. Mais malheureusement, aucun de ces 2 candidats n'a
russi.
Alors dans l'absence presque sre d'un manuel pour nos lves de la 1ere STE
pour la rentre 2006/2007, nous avons jug bon de diffuser notre travail dans le but
et le souhait que nos professeurs et nos lves en tirent profit.
Nous notons que :
- La dernire rvision de notre travail tait celle que nous avons faite
avant l'envoi de notre travail au jury (22/05/2006) ;
- Le nombre de pages fix par le concours qui est de 216, nous a
vraiment gn, car d'aprs notre modeste exprience, un tel ouvrage
en exige au moins 250 ;
Si vous jugez bon de nous faire une de vos prcieuses remarques, n'hsitez
pas le faire, car elle contribuera corriger une ventuelle erreur, amliorer une
partie, encourager les auteurs, etc.
Enfin dans lattente dun manuel officiel, nous esprons que cette version
lectronique de ce manuel vous sera utile et vous poussera chercher plus, car
comme on l'a dj signal, les 216 pages imposes par le cahier des charges du
concours nous ont contraints de faire des choix
Le 23/07/2006
e-mail (coordonnateurs de l'quipe pdagogique) :
- el.mimouni@caramail.com
- ahmed_hanafi@menara.ma
AVANT-PROPOS
Dans notre environnement quotidien, on utilise de plus en plus des systmes dont la complexit exige une
dmarche d'tude structure fonde sur la thorie des systmes. Pour aborder de tels systmes, il faut :
Un minimum de connaissances ou une culture technologique de base, en tant
qu'utilisateur ;
Et des comptences pluridisciplinaires impliquant une comprhension approfondie des
principes scientifiques et techniques sous-jacents, en tant que concepteur-ralisateur.
L' enseignement des Sciences de l'ingnieur apporte alors les concepts lmentaires pour aborder les
systmes. Il permet de :
Faire dcouvrir l'lve les constituants des divers champs technologiques pour l'aider
mieux affirmer son projet personnel ;
Dvelopper chez l'lve les comptences de raisonnement, de communication,
d'expression, d'organisation de travail et de recherche mthodique ;
Dvelopper chez l'lve les capacits d'auto apprentissage.
L'enseignement des Sciences de l'ingnieur privilgie l'acquisition de connaissances globales par approche
inductive et en promouvant l'utilisation des nouvelles technologies informatiques. Il se base sur des produits-
support qui peuvent tre aussi bien de l'environnement quotidien de l'lve que de l'environnement industriel.
Le produit-support met en vidence principalement :
Une approche fonctionnelle rpondant la question "A quoi sert le produit ?" ;
Une approche technologique rpondant la question "Comment est construit le produit ?" ;
Une approche physique rpondant la question "Comment le produit se comporte-t-il ?".
Ces diffrentes approchent se conjuguent trs bien avec la dmarche de projet qui est fortement conseille
pour la qualit d'enseignement qu'elle procure en favorisant l'autonomie, la recherche, le travail en quipe, la
communication, etc.
La structure de cet ouvrage est le reflet de cet aspect pluridisciplinaire qu'offre cet enseignement. Il est
conforme aux directives et programmes officiels. Il est ax principalement sur 4 units :
Unit 1 : Relative la chane d'nergie, elle traite des fonctions alimenter,
distribuer et convertir ;
Unit 2 : Relative la chane d'information, elle traite des fonctions acqurir,
traiter et communiquer ;
Unit 3 : Relative la chane d'nergie, elle traite de la fonction transmettre ;
Unit 4 : Projet encadr traitant de l'analyse fonctionnelle, logiciels de CAO et
directives pour la gestion dun projet.
Pdagogiquement, ces 3 units constituent les centres d'intrt cognitifs et mthodologies qui :
organise et structure les problmes rsoudre pour l'acquisition des connaissances ;
dtermine les activits proposes possibles proposer aux lves.
LES AUTEURS
4
COMMENT UTILISER CE MANUEL ?
Quatre units
Unit ADC qui dcrit les fonctions Alimenter,
Distribuer et Convertir de la chane nergie dun
systme
Unit ATC qui dcrit les fonctions Acqurir,
Traiter et Communiquer de la chane
dinformation dun systme
Unit T qui dcrit la fonction Transmettre de la
chane dnergie
Unit Projet qui dcrit l'analyse fonctionnelle,
les logiciels de CAO et les directives pour projet.
Index
(pages 215 216)
Sommaire
(page 3)
Organisation de louvrage
Organisation dune unit
Prsentation avec les prrequis
(premire page)
Prsentation de la fonction avec les
comptences vises et les chapitres inclus
(deuxime page)
Dveloppement de chaque chapitre
conformment au programme
(plusieurs pages)
Exercices rsolus, exercices non rsolus
(1 ou 2 pages)
5
SOMMAI RE
U N I T E A D C
FONCTION ALIMENTER
CHAPITRE 1 : LENERGIE ELECTRIQUE ............................................................................................ 11
1. TOPOLOGIE DU RESEAU ELECTRIQUE ......................................................................................................... 11
2. TYPES DE CENTRALE ............................................................................................................................ 12
3. LES SOURCES AUTONOMES ..................................................................................................................... 15
CHAPITRE 2 : LES GRANDEURS ELECTRIQUES ....................................................................................17
1. GRANDEURS CARACTERISTIQUES MISES EN JEU ............................................................................................. 17
2. ALIMENTATION CONTINUE STABILISEE ........................................................................................................ 20
CHAPITRE 3 : SECURITE DES BIENS ET DES PERSONNES ........................................................................ 24
1. EFFETS PHYSIOLOGI QUES DU COURANT ELECTRIQUE ...................................................................................... 24
2. TENSION LIMITE DE SECURITE ................................................................................................................. 25
3. CONTACT DIRECT ET INDIRECT ET PROTECTION ASSOCIEE ............................................................................... 25
CHAPITRE 4 : L' ENERGIE PNEUMATIQUE ......................................................................................... 27
1. CONSTITUTION DUNE INSTALLATION PNEUMATIQUE ....................................................................................... 27
2. PRODUCTION DE LENERGIE PNEUMATIQUE ................................................................................................. 27
3. PRINCIPES PHYSIQUES .......................................................................................................................... 28
FONCTION DISTRIBUER
CHAPITRE 1 : LES PREACTIONNEURS ELECTRIQUES ............................................................................. 30
1. LE RELAIS ........................................................................................................................................ 30
2. LE CONTACTEUR ................................................................................................................................ 32
3. LE SECTIONNEUR ................................................................................................................................ 33
4. LES FUSIBLES .................................................................................................................................... 34
5. LE RELAIS THERMIQUE .......................................................................................................................... 34
CHAPITRE 2 : HACHEUR SERIE / VARIATEUR DE VITESSE INDUSTRIEL .......................................................37
1. PRINCIPE DE FONCTIONNEMENT ............................................................................................................... 37
2. VARIATEURS INDUSTRIELS POUR MOTEUR A COURANT CONTINU ......................................................................... 39
CHAPITRE 3 : LES PREACTIONNEURS PNEUMATIQUES .......................................................................... 41
1. FONCTION ........................................................................................................................................ 41
2. CONSTITUANTS D'UN DISTRIBUTEUR .......................................................................................................... 41
3. LES PRINCIPAUX DI STRIBUTEURS PNEUMATIQUES ........................................................................................... 41
4. LES DISPOSITIFS DE COMMANDE .............................................................................................................. 42
5. APPLICATION: PRESSE PNEUMATIQUE ........................................................................................................ 43
FONCTION CONVERTIR
CHAPITRE 1 : CONVERTISSEUR ELECTROMECANIQUE ........................................................................... 46
1. ORGANISATION DE LA MACHINE ............................................................................................................... 46
2. PRINCIPE DE FONCTIONNEMENT ............................................................................................................... 46
3. MODELE ELECTRIQUE SIMPLE DU MOTEUR A COURANT CONTINU ......................................................................... 48
4. DEMARRAGE DU MOTEUR A COURANT CONTINU ............................................................................................ 48
5. BILAN DES PUISSANCE .......................................................................................................................... 49
6. REVERSIBILITE DE LA MACHINE A COURANT CONTINU ...................................................................................... 49
7. ALIMENTATION DU MOTEUR ................................................................................................................... 50
8. FONCTIONNEMENT A VITESSE VARIABLE ..................................................................................................... 50
CHAPITRE 2 : LES ACTIONNEURS PNEUMATIQUES ...............................................................................52
1. LES VERINS ....................................................................................................................................... 52
2. LE GENERATEUR DE VIDE OU VENTURI ....................................................................................................... 54
CHAPITRE 3 : AUTRES TYPES DE CONVERSION ................................................................................... 56
1. CONVERSION ENERGIE ELECTRIQUE / ENERGIE LUMINEUSE ............................................................................... 56
2. CONVERSION ENERGIE ELECTRIQUE / ENERGIE THERMIQUE .............................................................................. 57
3. CONVERSION ENERGIE ELECTRIQUE / ENERGIE CHIMIQUE ................................................................................. 57
6
SOMMAI RE
U N I T E A T C
FONCTION ACQUERIR
CHAPITRE 1 : LES CAPTEURS ........................................................................................................ 61
1. DEFINITION ...................................................................................................................................... 61
2. NATURE DE L'INFORMATION FOURNIE PAR UN CAPTEUR ................................................................................... 61
3. CARATERISTIQUES DUN CAPTEUR ............................................................................................................ 62
4. CAPTEURS LOGIQUES (TOUT OU RIEN : TOR) ................................................................................................ 62
5. CAPTEURS NUMERIQUES ........................................................................................................................ 66
CHAPITRE 2 : CONDITIONNEMENT DU SIGNAL ................................................................................... 69
1. INTRODUCTION .................................................................................................................................. 69
2. MISE EN FORME PAR COMPARATEUR UN SEUIL ............................................................................................ 71
CHAPITRE 3 : INTERFACE EN ENTREE .............................................................................................74
1. INTERFACE HOMME/MACHINE (IHM) .......................................................................................................... 74
2. ISOLATION GALVANIQUE ....................................................................................................................... 75
FONCTION TRAITER
CHAPITRE 1 : REPRESENTATION ET CODAGE DE L'INFORMATION BINAIRE................................................... 78
1. LES SYSTEMES DE NUMERATION............................................................................................................... 78
2. CODAGE DE L'INFORMATION BINAIRE ......................................................................................................... 79
3. NOTIONS D'ARITHMETIQUE BINAIRE .......................................................................................................... 81
CHAPITRE 2 : FONCTIONS COMBINATOIRES DE BASE ........................................................................... 83
1. OPERATIONS BOOLEENNES ELEMENTAIRES .................................................................................................. 83
2. AUTRES OPERATIONS ........................................................................................................................... 85
3. REPRESENTATION DES FONCTIONS LOGIQUES ............................................................................................... 87
CHAPITRE 3 : SIMPLIFICATION DES FONCTIONS LOGIQUES ....................................................................89
1. METHODE ALGEBRIQUE ......................................................................................................................... 89
2. METHODE GRAPHIQUE .......................................................................................................................... 89
CHAPITRE 4 : FONCTIONS COMBINATOIRES AVANCEES ........................................................................ 92
1. LES DECODEURS ................................................................................................................................. 92
2. LE MULTIPLEXEUR ............................................................................................................................... 94
3. LE DEMULTIPLEXEUR ............................................................................................................................ 95
4. L'ADDITIONNEUR ................................................................................................................................. 96
5. LE COMPARATEUR ..............................................................................................................................100
CHAPITRE 5 : NOTION DE MEMOIRE .............................................................................................. 102
1. CIRCUIT MEMOIRE EN TECHNOLOGIE ELECTRIQUE .........................................................................................102
2. CIRCUIT MEMOIRE EN TECHNOLOGIE ELECTRONIQUE .....................................................................................102
CHAPITRE 6 : FONCTIONS SEQUENTIELLES ..................................................................................... 104
1. LES BASCULES ..................................................................................................................................104
2. LES COMPTEURS ................................................................................................................................107
3. LES REGISTRES .................................................................................................................................110
4. LES MEMOIRES ..................................................................................................................................112
CHAPITRE 7 : FAMILLES LOGIQUES TTL ET CMOS ............................................................................. 117
1. NOTION DE FAMILLE DE CIRCUIT LOGIQUE ..................................................................................................117
2. LES VARIANTES TECHNOLOGIQUES DES FAMILLES LOGIQUES TTL ET CMOS ............................................................117
3. LA STRUCTURE DE BASE DES FAMILLES LOGIQUES TTL ET CMOS .........................................................................118
4. LES PARAMETRES ELECTRIQUES DES CIRCUITS LOGIQUES .................................................................................118
5. LES PERFORMANCES DYNAMIQUES DES CIRCUITS LOGIQUES ..............................................................................119
6. PERFORMANCES COMPAREES DES DIFFERENTES FAMILLES TTL ET CMOS ................................................................120
7. LES DIFFERENTS ETAGES DE SORTIE .........................................................................................................120
8. INTERFACAGE DES CIRCUITS LOGIQUES .....................................................................................................121
7
SOMMAI RE
CHAPITRE 8 : TEMPORISATEURS A BASE DE CIRCUITS INTEGREES .......................................................... 123
1. LE CIRCUIT DE BASE : LE CIRCUIT RC .......................................................................................................123
2. PRINCIPE DE BASE ..............................................................................................................................124
3. LE TEMPORISATEUR NE555 ....................................................................................................................124
4. MODES DE FONCTIONNEMENT DU NE555 ....................................................................................................124
CHAPITRE 9 : CIRCUITS LOGIQUES PROGRAMMABLES ........................................................................ 127
1. PRINCIPES ET TECHNIQUES DE BASE .........................................................................................................127
2. LA CLASSIFICATION DES PLD ..................................................................................................................128
3. LES PAL (PROGRAMMABLE ARRAY LOGIC)................................................................................................... 128
4. LES GAL (GENERIC ARRAY LOGIC) ............................................................................................................129
5. PROGRAMMATION DES PLD ....................................................................................................................129
CHAPITRE 10 : LE GRAFCET ....................................................................................................... 132
1. TYPES DE GRAFCET ............................................................................................................................ 132
2. ELEMENTS DE BASE ............................................................................................................................134
3. LES REGLES D'EVOLUTION D'UN GRAFCET ...................................................................................................134
4. STRUCTURES DE BASE D'UN GRAFCET .......................................................................................................135
CHAPITRE 11 : AUTOMATE PROGRAMMABLE INDUSTRIEL .................................................................... 139
1. LOGIQUE CABLEE ...............................................................................................................................139
2. AUTOMATE PROGRAMMABLE INDUSTRIEL ...................................................................................................140
FONCTION COMMUNIQUER
CHAPITRE 1 : INTERFACE EN SORTIE ............................................................................................ 148
1. INTERFACE HOMME/MACHINE (IHM) .........................................................................................................148
2. ISOLATION GALVANIQUE ......................................................................................................................149
CHAPITRE 2 : LIAISON PARALLELE ET LIAISON SERIE ......................................................................... 151
1. LIAISON PARALLELE ............................................................................................................................151
2. LIAISON SERIE ..................................................................................................................................151
3. NORME RS232 .................................................................................................................................. 152
4. NORME RS485 ..................................................................................................................................153
U N I T E T
CHAPITRE 1 : GENRALITES SUR LE DESSIN TECHNIQUE ...................................................................... 157
1. PRINCIPAUX TYPES DE DESSINS INDUSTRIELS ...............................................................................................157
2. FORMATS ........................................................................................................................................157
3. ELEMENTS PERMANENTS ......................................................................................................................158
4. L'ECHELLE .......................................................................................................................................158
5. LE CARTOUCHE .................................................................................................................................158
6. NOMENCLATURE ................................................................................................................................159
7. ECRITURE .......................................................................................................................................159
8. LES TRAITS ......................................................................................................................................159
CHAPITRE 2 : TRACES GEOMETRIQUES INTERSECTIONS .................................................................... 160
1. TRACES GEOEMETRIQUES .....................................................................................................................160
2. INERSECTIONS ..................................................................................................................................161
CHAPITRE 3 : REPRESENTATION GEOMETRIQUE DES PIECES ................................................................ 162
1. PERSPECTIVE CAVALIERE ......................................................................................................................162
2. PROJECTIONS ET VUES ........................................................................................................................162
3. COUPES SIMPLES HACHURES ................................................................................................................164
4. SECTION .........................................................................................................................................165
5. NOTIONS SUR LE FILETAGE ...................................................................................................................166
CHAPITRE 4 : EXECUTION GRAPHIQUE DE LA COTATION .................................................................... 168
1. ROLES ........................................................................................................................................... 168
2. EXECUTION GRAPHIQUE DE LA COTATION ..................................................................................................168
8
SOMMAI RE
CHAPITRE 5 : REPRESENTATION VOLUMIQUE................................................................................... 170
1. MODELEUR VOLUMIQUE .......................................................................................................................170
2. CREATION DES VOLUMES ELEMENTAIRES ...................................................................................................171
3. CREATION D'UNE PIECE SIMPLE ...............................................................................................................171
4. CREATION D'UN ASSEMBLAGE SIMPLE ........................................................................................................172
CHAPITRE 6 : TOLERANCES ET AJUSTEMENTS ................................................................................. 174
1. TOLERANCES DIMENTIONNELLES .............................................................................................................174
2. AJUSTEMENTS ..................................................................................................................................174
3. TOLERANCES GEOMETRIQUES ................................................................................................................175
CHAPITRE 7 : COTATION FONCTIONNELLE ..................................................................................... 177
1. DEFINITIONS ...................................................................................................................................177
2. METHODE POUR TRACER UNE CHAINE DE COTES ..........................................................................................178
CHAPITRE 8 : LES MATERIAUX .................................................................................................... 179
1. NOTIONS GENERALES ..........................................................................................................................179
2. DESIGNATION DES MATERIAUX ...............................................................................................................180
3. MISE EN UVRE DES MATERIAUX ............................................................................................................181
CHAPITRE 9 : LIAISONS ET SCHEMATISATION .................................................................................. 184
1. NOTION DE FONCTIONS MECANIQUES .......................................................................................................184
2. FONCTION LIAISON .............................................................................................................................184
3. SCHEMATISATION ..............................................................................................................................186
CHAPITRE 10 : LIAISONS ENCASTREMENTS ..................................................................................... 188
1. DEFINITION .....................................................................................................................................188
2. MOYENS DASSEMBLAGE DEMONTABLES .....................................................................................................188
3. MOYENS DASSEMBLAGE NON DEMONTABLES (PERMANENTS) ............................................................................190
CHAPITRE 11 : LUBRIFICATION ETANCHEITE ................................................................................. 192
1. LUBRIFICATION .................................................................................................................................192
2. ETANCHEITE ....................................................................................................................................193
CHAPITRE 12 : FONCTION GUIDAGE ............................................................................................ 195
1. GUIDAGE EN ROTATION .......................................................................................................................195
2. GUIDAGE EN TRANSLATION ...................................................................................................................196
U N I T E P R O J E T E N C A D R E
CHAPITRE 1 : ANALYSE FONCTIONNELLE ...................................................................................... 199
1. ANALYSE FONCTIONNELLE EXTERNE .........................................................................................................199
2- ANALYSE FONCTIONNELLE INTERNE .........................................................................................................202
3- STRUCTURE FONCTIONNELLE D'UN SYSTEME ...............................................................................................205
CHAPITRE 2 : CONCEPTION ASSISTEE PAR ORDINATEUR (CAO) ............................................................. 210
CHAPITRE 3 : PROJET ENCADRE - DIRECTIVES ................................................................................. 211
1. DIRECTIVES .....................................................................................................................................211
2. EXEMPLES DE PROPOSITIONS DE PE ..........................................................................................................212
3. EXEMPLES DE SYSTEMES .......................................................................................................................213
BIBLIOGRAPHIE ...................................................................................................................... 215
INDEX .................................................................................................................................. 216
UNI TE ADC
9
UNI T ADC
Al i ment er- Di s t r i buer- Conver t i r
P R E R E Q U I S
Connaissances gnrales acquises dans lenseignement Tronc Commun.
Concepts danalyse fonctionnelle :
Systme ;
Fonction globale et fonctions de services ;
Fonctions techniques, FAST, SADT, etc.
P R S E N T A T I ON
Pour agir sur la matire d'uvre, un systme automatis a besoin dnergie, qui subira
de nombreux traitements pour tre adapts la nature de l'action sur la matire d'uvre.
Lunit ADC traite donc de ces aspects qui peuvent tre modliss par les fonctions
gnriques, c'est dire qui s'appliquent sur la plupart des systmes ; il s'agit des fonctions :
Alimenter ;
Distribuer ;
Convertir ;
Grandeurs
physiques
mesurer
U n i t A D C
nergies
dentre
ACQUERIR
TRAITER COMMUNIQUER
AGIR
Chane dinformation
Informations
destines dautres
systmes et aux
interfaces H/M
Ordres
Informations
issues dautres
systmes et
dInterfaces H/M
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
Matire d'uvre
en entre
Matire d'uvre en
sortie
Chane dnergie
FONCTI ON - Al i ment er
10
En gnral, les systmes automatiss mettent en uvre plusieurs types dnergie. Les
nergies principalement exploites sont lnergie lectrique et lnergie mcanique sous
leurs diffrentes formes. On note en particulier :
La source dnergie lectrique, qui grce la souplesse de ses mthodes de
gnration et de transport, demeure une richesse ingale. Il nest pas
surprenant donc de remarquer que lalimentation en nergie lectrique est
largement adopte aussi bien en milieu industriel quen milieu domestique ;
La source dnergie pneumatique qui est aussi largement prsente dans les
systmes industriels. Cette nergie est dans la plupart des cas gnre partir
de lnergie lectrique.
La position de la fonction Alimentation en nergie dans une chane dnergie, ainsi que sa
fonction globale sont reprsentes par la figure suivante :
Energie Source dalimentation Energie
Electrique Rseau lectrique, piles, etc. Electrique
Electrique Compresseur Pneumatique
UNITE ADC
FONCTION
A L I M E N T E R
PRESENTATION
COMPETENCES ATTENDUES
A partir de tout ou partie dun produit support avec son cahier des charges et son dossier
technique :
Identifier les constituants du rseau dalimentation
Exprimer les caractristiques des constituants du rseau dalimentation
CHAPITRES INCLUS DANS LA FONCTION ALIMENTER
Alimentation lectrique
Grandeurs lectriques caractristiques
Scurit des biens et des personnes
Alimentation pneumatique
ALIMENTER DISTRIBUER CONVERTIR
UNITE ADC
TRANSMETTRE AGIR
Matire
duvre en
entre
Matire
duvre en
sortie
nergie
dentre
Alimenter
en nergie
CHANE DNERGIE
Energie
dentre
Energie
de sortie
Chapi t re 1 - L nergi e l ect ri que
11
CHAPITRE 1
LENERGIE ELECTRIQUE
INTRODUCTION :
L'nergie lectrique provient dune transformation d'nergie mcanique, magntique, chimique ou
lumineuse. Cette source dnergie peut se prsenter sous forme dune source de tension continue ou
alternative. Lunit dune tension lectrique est le Volt (V).
1. TOPOLOGIE DU RESEAU ELECTRIQUE :
Le systme lectrique comprend des sites de production (centrales nuclaires, thermiques,
hydrauliques, ou production dcentralise : oliennes, petite hydraulique, cognration, etc.), et des
lieux de consommation (communes, entreprises, etc.), relis par le rseau lectrique (transport et
distribution). Ce dernier a pour rle dacheminer lnergie vers les lieux de consommation, avec des
tapes dlvation et de baisse du niveau de tension dans des postes de transformation. La tension la
sortie des grandes centrales est porte 400 000 volts pour limiter les pertes dnergie sous forme de
chaleur dans les cbles ; ce sont les pertes par effet Joule .
Ensuite, la tension est progressivement rduite au plus prs de la consommation, pour arriver aux
diffrents niveaux de tension auxquels sont raccords les consommateurs (400 000 volts, 225 000 volts, 90
000 volts, 63 000 volts, 20 000 volts, 400 volts ou 230 volts suivant leurs besoins en puissance).
L'ONE (Office National dElectricit) assure cette fourniture par l'exploitation directe d'units de
production ainsi que par les ouvrages qu'il a confis des oprateurs privs dans le cadre de contrats de
production concessionnel.
En terme de production le rseau national a pour mission de :
- assurer une gestion optimale du parc de production ;
- veiller la satisfaction de la demande en nergie lectrique exprime par le Dispatching National,
et ceci dans les meilleures conditions de scurit, de rendement, de disponibilit et de cot.
Le parc national de production est compos de moyens de production thermique, hydraulique et
olienne.
FONCTI ON - Al i ment er
12
A la fin 2005, ce parc se compose comme suit :
Puissance installe en MW
26 usines hydrauliques 1 265
Station Pompage et turbinage dAfourer* 464
5 centrales thermiques vapeur 2 385
charbon 1785
Fioul 600
6 centrales turbines gaz 615
Cycle combin de TAHADDART 400
Thermique diesel 69
Total Thermique 3 469
Eolien (dont 50 MW de la CED*) 53,9
Total ONE 5 252
* rgion derrachidia.
** Comit europenne de distribution.
NOTA : Le Watt (W) est lunit de la puissance. Une source de puissance 1kW peut alimenter, en mme
temps, dix ampoules de 100W chacune.
Le graphique suivant reprsente la
satisfaction en nergie lectrique du
client marocain. Une part de cette
consommation est assure par les
centrales de production hydraulique, une
autre par les centrales de production
thermique, une autre par les techniques
nouvelles (oliens, solaires, etc.) ; le
reste de la demande est import de
lUnion Europen.
2. TYPES DE CENTRALE :
2.1. Dfinitions gnrales :
2.1.1. Turbine :
C'est un moteur rotatif qui convertit lnergie dun courant deau, de vapeur ou de gaz en nergie
mcanique. Dans le domaine de la production on peut donner titre dexemple :
Turbine pelton Turbine vapeur
Chapi t re 1 - L nergi e l ect ri que
13
2.1.2. alternateur :
Cest lorgane qui transforme lnergie de la rotation en une nergie lectrique :
L'alternateur fournit une ligne trifilaire
(signal triphas) dont les tensions sont des
sinusodes dphases de 120 et dont la
valeur efficace est de 20kV.
La frquence des tensions est de 50Hz ;
cette frquence (f) est fixe par la vitesse
de rotation de la turbine (n) et le nombre
des ples (P) de lalternateur selon la
relation :
f = p x n.
Avec :
- f en Hz (Hertz)
- n en trs/s (tours/seconde)
Exemple : n=1500tr/min et p= 2 donc f = 50Hz.
V1(t) = V.2.sin(2tft)
V2(t) = V.2.sin(2tf t - 2t/3)
V3(t) = V.2.sin(2tf t - 4t/3)
Avec V = 20kV
2.2. Energie dorigine hydraulique :
Dans ce type de centrale la puissance de leau (nergie potentielle) est exploite pour entraner des
turbines couples des alternateurs. On distingue :
Les centrales de haute chute : La hauteur de chute est suprieure 200m.
Les centrales de moyenne chute : La hauteur de chute est comprise entre 30m et 200m.
Les centrales de basse chute : La hauteur de chute est infrieure 30m.
FONCTI ON - Al i ment er
14
Les usines de pompage/turbinage : Les stations de transfert d'nergie par pompage
fonctionnent sur le principe du recyclage de l'eau par pompage :
Turbinage : l'alternateur produit de l'nergie lectrique.
Pompage : la pompe consomme de l'nergie pour remonter l'eau d'un bassin infrieur
un bassin suprieur.
Les stations marmotrices : qui exploitent la force de la marr pour entraner les turbines.
2.3. Energie dorigine thermique :
Dans ce type de centrale, la chaleur produite par la combustion dun combustible (charbon, fuel ,
etc.), produit lvaporation de leau. Cette vapeur sous pression permet dentraner une turbine
vapeur en rotation :
2.4. Energie dorigine nuclaire :
Une centrale nuclaire est une centrale thermique qui utilise l'nergie fournie par un racteur
nuclaire. Ce racteur produit une grande quantit de chaleur qui est capte par de l'eau sous pression
circulant dans le circuit primaire (circuit ferm).
Exemple de la marr haute
Mer
Turbine
Chapi t re 1 - L nergi e l ect ri que
15
Par l'intermdiaire du gnrateur de vapeur, l'eau sous pression du circuit primaire communique sa
chaleur l'eau d'un deuxime circuit ferm, le circuit secondaire. Il est ainsi possible d'obtenir de la
vapeur haute pression dans ce circuit secondaire.
La pression de cette vapeur fait tourner grande vitesse une turbine qui entrane elle-mme un
alternateur qui produit une tension alternative sinusodale. A la sortie de la turbine la vapeur est
refroidie pour se transformer en eau, puis renvoye dans le gnrateur de vapeur.
Le refroidissement de la vapeur issue de la turbine est confi une tour de refroidissement ou un
cours d'eau important.
3. LES SOURCES AUTONOMES :
3.1. Energie solaire :
On distingue deux types de centrale exploitant lnergie du soleil :
Centrales thermodynamiques : La
concentration du rayonnement solaire par des
miroirs permet dobtenir des tempratures de
lordre de 450C. Cette temprature permet
dvaporer leau qui fait tourner des turbines.
Centrales photovoltaques ou photopiles :
Dans ces centrales des cellules photovoltaques
utilises cet effet sont des composants
lectroniques semi conducteur capable de
dbiter un courant lectrique dans un circuit
extrieur, lorsquils sont clairs par le
rayonnement solaire.
Centrale thermosolaire de Ain Bni Mathar
FONCTI ON - Al i ment er
16
3.2. Energie du vent :
Lnergie cintique du vent produit la rotation des ples dune
olienne, qui est une sorte de grand moulin, qui actionne
l'alternateur. Les ressources du vent sont considrables mais
irrgulires entre le jour et la nuit, entre lhiver et lt ; cest
pourquoi, cette solution reste onreuse.
3.3. Groupes lectrognes :
Les groupes lectrognes sont des petits alternateurs dont
lentranement en rotation se fait en gnral, par un moteur
thermique (moteur Diesel par exemple). La puissance est
gnralement limite quelques dizaines de kilowatts.
Ces groupes sont gnralement utiliss comme
alimentation de secours, alimentation lectrique
ininterruptible dans les locaux exigeant une continuit de
service tel que les hpitaux.
3.4. Piles et accumulateurs :
Parmi les gnrateurs de tension continue les plus rencontrs dans la pratique quotidienne, on
trouve les piles et les batteries daccumulateurs. Cette source reprsente une transformation de
lnergie chimique en nergie lectrique.
E X E R C I C E R E S O L U
Une station dirrigation est alimente par cellules solaires. Sachant que la station est constitue par deux
pompes dont la puissance de chacune est 3kW et de rendement 93 %. La tension dalimentation nominale
est de 100 V (cest la tension fournir au groupe pompe/convertisseur).
Sachant que chaque cellule lmentaire peut fournir une puissance 1W avec une tension 1.25V :
1. Quel est le nombre de cellules photovoltaques utiliser.
2. Donner un schma de branchement de ces cellules.
3. Si laire dune cellule est de 5cm
2
. Quel est laire total en m
2
occup par le panneau solaire.
CORRIGE
:
1. Le nombre de cellules utiliser est :
N = la puissance totale demande / la puissance dune cellule.
N = 6000 / 1 soit 6000 cellules photovoltaque.
2. La tension que doit fournir le panneau est U = 100V. Donc le nombre de cellule mettre
en srie est : Ns = 100/1.25 soit 80 cellules.
Or on doit utiliser au minimum 6000 cellules pour assurer la puissance demande. Donc le
nombre de ranges (80 cellules dans chaque rang) mettre en parallle : Np = 6000/80
soit 75 ranges.
3. Laire totale occupe par le panneau est : A = 6000 x 5 cm
2
= 30 000 cm
2
, soit A = 3 m
2
.
V
V
Piles
Accumulateur
Chapi t re 2 - Les grandeurs l ectri ques
17
Chapitre 2
LES GRANDEURS ELECTRIQUES
1. GRANDEURS CARACTERISTIQUES MISES EN JEU :
1.1. Notion du courant lectrique :
Le dplacement des lectrons libres dans un circuit
lectrique ferm engendre ce quon appelle un courant
lectrique. Lunit du courant lectrique est lAmpre (A).
1.2. Mesure de courant lectrique :
On mesure le courant lectrique par lutilisation dun ampremtre. Lampremtre est un appareil
qui doit tre mont en srie dans un circuit comme le montre la figure suivante :
1.3. Notion de rsistance :
1.3.1. Principe et symbole :
Un fil conducteur prsente une diffrence de potentiel (d.d.p) entre ses bornes lorsquil est travers
par un courant lectrique. Ceci est d sa rsistance interne dont la valeur est donne par la
formule :
avec :
- l : longueur du fil ;
- S : sa section ;
- : la rsistivit (caractristique de la nature du conducteur)
1.3.2. Loi dOhm :
Cette loi exprime que certains matriaux ont une rponse linaire en
courant une diffrence de potentiel impose. Si on considre une
rsistance, not R avec ses bornes une tension U , elle sera
traverse par un courant I, tel que, quelque soit le temps t, U et I
vrifient toujours la relation de proportionnalit :
e
e
e
e
e
U = R . I
R = .l / S
Charge
A
Source
FONCTI ON - Al i ment er
18
1.3.3. Association des rsistances :
Suivant que des rsistances sont associes en srie ou en parallle, il rsulte de leur association une
rsistance quivalente Re dont la valeur dpend des valeurs des diffrentes rsistances associes.
a. Association srie :
La rsistance quivalente de deux rsistances en srie est la somme de ces deux rsistances.
b. Association en parallle :
La rsistance quivalente de deux rsistances en parallle est tel que :
2 1
1 1 1
R R R
e
+ =
1.3.4. Code de couleurs :
On ne peut pas fabriquer les rsistances avec toutes les valeurs possibles. Les rsistances sont
fabriques en grandes sries par les constructeurs des composants lectroniques. On les fabrique
alors suivant des valeurs normalises, qui couvrent largement les besoins en rsistances. Ces valeurs
sont indiques sur ces rsistances sous forme danneaux en couleur suivant le code suivant :
La tolrance est un pourcentage qui indique la prcision de la rsistance. Connaissant la valeur de
chaque chiffre on peut dterminer la valeur de la rsistance comme suit:
R = [(1
er
chiffre x 1) + (2eme chiffre x 10)] x 10
Multiplicateur
la tolrance en .
Re = R1 + R2
Chapi t re 2 - Les grandeurs l ectri ques
19
Exemple : Calcul de la valeur d'une rsistance dont les trois couleurs significatives sont le rouge.
R = [ (2 x1) + (2 x 10) ] x 10
2
= 22 x 100 = 2,2 KO
Les valeurs normalises des rsistances sont classes par des sries de valeurs notes (E6, E12, E24
ou E48), qui indiquent le nombre de valeurs dans une srie. Par exemple, les valeurs de la srie E12
sont :
10 ; 12 ; 15 ; 18 ; 22 ; 27 ; 33 ; 39 ; 47 ; 56 ; 68 ; 82
Toutes les rsistances de la srie E12 sont des multiples ou des sous multiples de ces valeurs .Par
exemple, on trouve 1,2O , 12O, 120O, 1.2KO, 12KO, 120KO, 1.2MO et ainsi de suite.
1.3.5. Rsistance variable :
On a souvent besoin, dans les montages lectroniques, de rgler une rsistance sur place pour avoir
la valeur exacte exige par un montage donn ; on utilise alors :
- Soit un potentiomtre pour rgler la rsistance rgulirement comme pour le volume d'un
poste Radio ;
- Soit un ajustable pour ajuster la valeur ncessaire une fois pour toute ;
Dans les 2 cas, le symbole est le mme : P est la valeur totale
de la rsistance. Le curseur divise la rsistance totale P en 2
portions :
- R1 = P :
Si le curseur est en position haut, alors = 1 et R1 = P ;
Si le curseur est en position basse, alors = 0 et R1 = 0.
- R2 = P R1 = P P = P(1- ).
1.4. Diviseur de tension :
Pour diviser une tension, on utilise un pont diviseur de tension. Ce
pont est constitu de lassociation en srie de deux rsistances R1 et
R2 :
Vs = [R
2
/ (R
1
+ R
2
)].U
Remarque : Cas d'une rsistance variable :
P
R1 = P
R2 = P(1 )
Vs
P
.P
Ve
Vs = Ve. P/P
Vs = .Ve
Potentiomtre
A
j
u
s
t
a
b
l
e
s
FONCTI ON - Al i ment er
20
1.5. Diviseur de courant :
On divise un courant par la mise en parallle de deux rsistances R
1
et R
2
:
1.6. Puissance :
On appelle puissance lnergie consomme ou dbite par une charge pendant une seconde. Cest le
produit du courant qui traverse la charge avec la tension aux bornes :
P = U . I
Pour mesurer la puissance on utilise gnralement un wattmtre.
1.7. Frquence :
Pour un signal priodique u(t), c'est le nombre de priodes par seconde. L'unit de la frquence est
le hertz (Hz). De ce fait la relation qui lie la frquence la priode est :
2. ALIMENTATION CONTINUE STABILISEE :
Les systmes lectroniques ont besoin dune alimentation continue. Cette tension continue est
gnralement gnre partir de :
- piles pour les systmes portables et faible consommation, tel qu'une tlcommande de
tlvision, etc.
- de batterie d'accumulateurs pour les systmes tel que la voiture, etc.
- secteur pour des systmes qui demande de la puissance et qui ont accs au rseau alternatif.
I1 = I .[R1 / (R1 + R2)]
W
Charge U
I
U
La puissance mesure par le
wattmtre est :
P = U . I
F = 1/T
T : priode en seconde (s). C'est le temps aprs lequel le signal se rpte.
t T
u(t)
Chapi t re 2 - Les grandeurs l ectri ques
21
Dans ce dernier cas, la tension alternative doit tre convertie en tension continue stabilise,
conformment au schma synoptique suivant :
2.1. Transformation :
Le rle de la transformation est dabaisser la tension du secteur, qui est de 220V. Llment
lectrique qui ralise cette fonction est le transformateur.
2.2- Redressement :
Cette fonction est ralise laide de la diode.
2.2.1- Fonctionnement et symbole :
La diode est un composant lectronique conduction unidirectionnelle : elle ne conduit que dans le
sens de lanode A vers la cathode K. Son symbole est reprsent la figure ci-dessous. Le symbole
de la diode indique le sens de conduction. Ud = 0,7V est appele la tension de seuil de la diode.
Polarisation directe : diode passante Polarisation inverse : diode bloque
Id
Ud
Anode (A)
Kathode (K)
U1/U2 = n2/n1
Avec n2 et n1 sont respectivement
les nombres de spires de la bobine
primaire et la bobine secondaire.
Alors pour avoir une tension en
sortie plus petite qu'en entre, il faut
avoir la condition (n2 < n1).
Transformation Redressement
Filtrage Rgulation
Secteur
220 v 50Hz
Tension
de sortie
FONCTI ON - Al i ment er
22
2.2.2- Ralisation du redresseur :
a. Redressement mono alternance :
Le signal issu du transformateur est sinusodal. La diode est polarise en directe dans lalternance
positive et en inverse dans lalternance ngative.
b. Redressement double alternance :
Le montage le plus populaire est le redresseur pont de diodes ; il a 2 diodes conductrices par
alternance :
- D1 et D3 conduisent pendant l'alternance positive ;
- D2 et D4 conduisent pendant l'alternance ngative.
On remarque que le courant en sortie passe toujours dans le mme sens, d'o la forme du signal en
sortie.
Note : Une LED est une diode qui a le mme fonctionnement qu'une diode
ordinaire, la diffrence quelle est destine mettre une lumire
(rouge, vert, jaune et orange) quand elle est passante. Pour une LED
rouge, la tension de seuil est 1.5V et un courant de 10mA donne une
intensit lumineuse de signalisation satisfaisante.
2.3. Filtrage :
Cette fonction est ralise par un condensateur. Le condensateur en se chargeant et en se
dchargeant diminue londulation du signal redress ; Rc tant la rsistance de charge :
Redressement
Rc
Chapi t re 2 - Les grandeurs l ectri ques
23
2.4. Rgulation :
La rgulation est la fonction qui permet d'avoir une tension hautement continue partir d'une
tension ondule comme issue du condensateur ci-dessus. Elle est assure par le rgulateur intgr qui
est un composant lectronique gnralement trois broches.
Dans la pratique, la famille des rgulateurs de type 78xx est la plus utilise. Un rgulateur de
cette famille dlivre une tension constante ses bornes de sortie gale xx V.
Exemples : 7805 : tension la sortie gale +5V.
7812 : tension la sortie gale +12V.
E X E R C I C E R E S O L U
On suppose qu'on a une alimentation base du rgulateur 7805. Calculer la rsistance de protection de la
LED de signalisation de la prsence de la tension de sortie du rgulateur (5V).
CORRIGE :
U
R
= 5 - U
LED
= 5 - 1.5 = 3.5V ; I
LED
= I
R
= 10mA R = U
R
/I
R
= 350 O.
La valeur normalise la plus proche dans la srie E12 est 330 O.
P
R
= U
R.
.I
R
= 3.5 x 0.01 = 35 mW.
Les puissances normalises sont : 1/8W, 1/4W, 1/2W, 1W, etc. On retient alors 1/8W. Le choix final
est :
330 O - 1/8W
Secteur
220v
50Hz
Transformateur
Application type (Alimentation rgule)
LED de
signalisation
R
FONCTI ON - Al i ment er
24
CHAPITRE 3
SECURITE DES BIENS ET DES PERSONNES
INTRODUCTION :
L'utilisation de l'lectricit peut prsenter des risques d'lectrocution et aussi des risques d'incendie.
En effet le courant lectrique a des effets physiques sur le corps ; ceci peut se produire avec un contact
direct ou indirect avec un conducteur sous tension. Il convient alors de prendre les mesures de scurit
ncessaires pour protger les biens et les personnes.
1. EFFETS PHYSIOLOGIQUES DU COURANT ELECTRIQUE
Le passage du courant affecte essentiellement les fonctions respiratoires et circulatoires ; il provoque
galement des brlures. La gravit du danger est fonction de l'intensit du courant qui parcourt le corps,
de son trajet, et du temps de passage :
Effet du courant lectrique sur le corps humain
0.1 0.5 10 50 100
t(s)
5
1
0.5
0.1
0.05
0.02
0.01
Principales zones :
1. pas de sensation
2. Sensation
3. Limite du courant de non lcher , douleurs,
sans effets irrversible.
4. Risque de fibrillation ventriculaire
1 2
3
4
1A Arrt du coeur
75mA Seuil de fibrillation cardiaque irrversible
30mA Seuil de paralysie respiratoire
10mA Contraction musculaire (Ttanisation)
0.5mA Sensation trs faible
(mA)
Chapi t re 3 - Scuri t des bi ens et des personnes
25
2. TENSION LIMITE DE SECURITE
Selon le type de local, on
dfinit deux types de tension de
scurit, 25V pour les locaux
humides et 50V pour les locaux
secs. Ces tensions dites non
dangereuses coulent dans le corps
humain un courant infrieur 30
mA (seuil de paralysie respiratoire).
Le danger du courant lectrique
tant fonction de sa dure de
passage. Sur la figure suivante on
reprsente le temps de coupure
maximal du dispositif de protection
en fonction de la tension de dfaut.
Exemple :
Lors d'un dfaut dans un local
sec (Uc = 50 V), si la tension de
contact vaut 120 V, le dispositif de
protection doit couper le circuit en
moins de 0,2 secondes.
3. CONTACT DIRECT ET INDIRECT ET PROTECTION ASSOCIEE :
3.1- Contact direct :
C'est le contact des personnes avec les parties actives des
matriels lectriques, conducteurs ou pices sous tension.
3.2- Contact indirect :
Contact des personnes avec des masses mises
accidentellement sous tension gnralement suite un dfaut
disolement.
3.3- Protection contre les contacts directs :
Les principales mesures de protection contre les contacts directs sont :
- Lisolation des parties actives du matriel lectrique (gaine, cache bornes, etc.).
- La protection au moyen d'enveloppes et de barrires (coffrets, tableaux, etc.) qui
permettent de rendre le matriel lectrique inaccessible.
- Mise hors de porte, par loignement : C'est le cas des lignes ariennes haute tension et
basse tension.
Terre
Courbe de scurit
FONCTI ON - Al i ment er
26
- L'utilisation de la TBTS (Trs Basse Tension de Scurit : infrieure 25 V). Cette mesure
consiste alimenter des circuits sous trs basse tension fournie par un transformateur de
scurit.
3.4. Protection contre les contacts indirects
En cas de dfaut disolement, il faut couper automatiquement l'alimentation du circuit prsentant
le dfaut. Pour mettre en oeuvre cette mesure, on utilise en gnral le DDR (Disjoncteur Diffrentiel
courant Rsiduel) ; le principe dun tel dispositif est de dtecter le courant de dfaut qui passe
travers la terre et ouvre le circuit, ce qui offre une protection des biens et des personnes.
E X E R C I C E R E S O L U
Dans un atelier, la tension limite de scurit U
L
= 12 V. On a mesur une rsistance de prise de terre de
40O. Quel doit tre le calibre du disjoncteur diffrentiel ?.
CORRIGE :
On sait que UL R x Ir do Ir UL/R = 0,3A soit Ir=300mA.
E X E R C I C E N O N R E S O L U
Une machine laver est alimente par une
prise de courant bifilaire (phase et neutre)
sans prise de terre. Lors dun dfaut
disolement la ligne de phase touche la
carcasse.
1. Est-ce que le disjoncteur diffrentiel peut dtecter le dfaut ?.
2. Quels sont les dangers prvisibles dans cette situation ?
3. pour quelle tension limite U
L
vous optez dans cette situation ?
4. On installe une prise de terre dont la rsistance peut prendre des valeurs entre 30 et 50O.
Proposer un rglage du disjoncteur diffrentiel pour que la protection soit optimale.
L
N
220v/24
v
Alimentation en TBTS par transformateur de scurit
R = 0O
Transformateur
de distribution
(ONE)
Chapi t re 4 - L nergi e pneumat i que
27
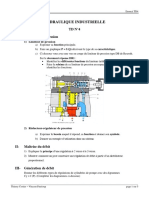
6 : Moteur
7 : Compresseur
8 : Lubrificateur
9 : Filtre rgulateur
10 : Pot de condensation
11 : Purge
1 : Accumulateur
2 : Manomtre
3 : Soupape de scurit
4 : Vanne disolement
5 : Filtre principal
CHAPITRE4
L' ENERGIE PNEUMATIQUE
INTRODUCTION :
Lnergie pneumatique est couramment utilise dans la partie oprative d'un systme automatis ; la
source de cette nergie est lair comprim. La production de l'nergie pneumatique (air comprim) peut
tre rsume en 3 phases principales : la compression, stockage et distribution de l'air comprim.
1. Constitution dune installation pneumatique:
Une installation pneumatique est compose de :
1. un gnrateur dair comprim (compresseur)
2. un rservoir de capacit proportionnelle au dbit de linstallation
3. un rseau de canalisations
4. des appareils auxiliaires assurant diverses fonctions :
- rglage des caractristiques de l'air : dtendeur, rgulateur de pression, etc.
- conditionnement de lair : filtre, lubrificateur, etc.
- contrle et scurit : manomtre, soupape, etc.
2. Production de lnergie pneumatique :
2.1. Compression de l'air :
Un compresseur (7), entran par un
moteur (6), aspire et comprime lair
ambiant et laccumule dans un rservoir
(accumulateur).
Compresseur
Rotation
T
r
a
n
s
l
a
t
i
o
n
(
C
o
m
p
r
e
s
s
i
o
n
)
FONCTI ON - Al i ment er
28
2.2- Stockage :
Laccumulateur (1) stocke lair comprim issu du compresseur et vite ainsi de faire fonctionner le
moteur tout le temps. Il permet en plus de compenser les variations de pression. Pour des raisons de
scurit, laccumulateur comporte :
- une vanne disolement
- un robinet de purge,
- un manomtre.
2.3- Distribution :
La distribution de lair comprim seffectue par un
rseau de canalisations et diffrents piquages servant de
point d'accs ce rseau pneumatique. Un groupe de
conditionnement y est install afin de filtrer et de lubrifier
l'air comprim:
- un filtre : pour asscher l'air et filtrer les
poussires.
- un mano-rgulateur : pour rgler et rguler la
pression de l'air.
- un lubrificateur : pour viter la corrosion et
amliorer le glissement.
3. PRINCIPES PHYSIQUES :
La force mcanique produite par lnergie pneumatique est lie la pression par la relation :
- F est la force rsultante en Newton
- p est la pression en Pascals (Pa)
- S est la surface en m
2
.
Le pascal tant trop petit pour les pressions utilises dans lindustrie, on utilise souvent le bar :
Dans une installation pneumatique on se limite une pression de 6 10 bar.
- 1 bar = 10
5
Pa.
- 1 bar = 100000 N/m2
F= p . S
Surface S
F=p.s
Force
Pression p de
l'air
comprim
Lubrificateur
Rgulateur
de pression
Filtre
Unit FRL
Compresseur+ accumulateur Vanne disolement
Manomtre
29
La partie commande dun systme automatis met en uvre une nergie faible. Elle est
donc incapable denvoyer directement lnergie ncessaire lactionneur ; do lutilisation
des practionneurs qui assurent la distribution de lnergie aux actionneurs.
La position d'une telle fonction dans une chane d'nergie, ainsi que sa fonction globale
sont reprsentes par les figures suivantes.
On s'intresse surtout aux nergies lectriques et pneumatiques, qui sont le plus souvent
utilises :
Energie Practionneur Energie
Electrique Contacteur ou Relais Electrique
Pneumatique Distributeur Pneumatique
UNITE ADC
FONCTION
D I S T R I B U E R
PRESENTATION
COMPETENCES ATTENDUES
A partir de tout ou partie dun produit support avec son cahier des charges et son dossier
technique :
Expliquer le principe de fonctionnement dune commande
Choisir et mettre en uvre lappareil de commande
CHAPITRES INCLUS DANS LA FONCTION DISTRIBUER
Practionneurs lectriques
Hacheur srie / Variateur de vitesse industriel
Practionneurs pneumatiques
ALIMENTER CONVERTIR
UNITE ADC
TRANSMETTRE AGIR
Matire
duvre en
entre
Matire
duvre en
sortie
nergie
dentre
Distribuer
lnergie
CHANE DNERGIE
DISTRIBUER
Energie
disponible
Energie
distribue
FONCTI ON - Di st ri buer
30
CHAPITRE 1
LES PREACTIONNEURS ELECTRIQUES
INTRODUCTION
Les practionneurs sont des constituants qui, sur ordre de la partie de
commande, assurent la distribution de lnergie de puissance aux
actionneurs. Dans les circuits lectriques, les practionneurs sont
gnralement soit un relais, soit un contacteur. Le contacteur assure en
plus lextinction de larc lectrique qui accompagne souvent la
commutation de lnergie de forte puissance. En effet, quand on ouvre un
circuit en cours de fonctionnement, le contact en cause provoque un arc
lectrique qui peut tre dangereux pour les biens et les personnes.
1. LE RELAIS
Le relais est un composant lectrique ralisant la fonction dinterfaage entre un circuit de
commande, gnralement bas niveau, et un circuit de puissance alternatif ou continu (Isolation
galvanique). On distingue deux types de relais : le relais lectromagntique et le relais statique.
1.1. Relais lectromagntique :
1.1.1. principe :
Un relais lectromagntique est constitu dune bobine alimente par le circuit de commande, dont
le noyau mobile provoque la commutation de contacts pouvant tre plac dans un circuit de
puissance. Le relais lectromagntique est rserv pour les faibles puissances.
1.1.2. Caractristiques fondamentales :
- Tension dalimentation : Cest une tension continue qui permet dexciter la bobine.
- La rsistance de la bobine : paramtre permettant de dterminer le courant circulant dans le
circuit de commande.
- Le courant des contacts : cest le courant maximal que peut commuter les contacts de relais
sans dommage.
1.2. Relais statique :
1.2.1. Dfinition
Ce qui est vrai pour un relais lectromagntique est vrai pour un relais
statique. De plus un relais statique commute de manire totalement
statique, sans pice en mouvement, confrant au composant une
dure de vie quasiillimite. La structure de base dun relais statique
ainsi que son fonctionnement sont comme suit :
Chapi t re 1 - Les pract i onneurs l ectri ques
31
1. Le circuit d'entre correspond
l'unit de traitement ;
2. Le circuit de mise niveau ;
3. Le circuit de dtection de passage
de zro permet de ne commuter le
relais que si la tension secteur est
pratiquement nulle ; ainsi on
vitera les rayonnements dus une
commutation d'une grande valeur ;
4. La charge.
1.2.2. Caractristiques fondamentales :
- Courant demploi : courant maximal que peut commuter le contact de sortie.
- Tension dentre : cest la tension dalimentation. Elle peut tre continue ou alternative.
- Tension de sortie : cest la tension dalimentation de la charge. Elle est gnralement de type
alternative.
1.3. Exemple de circuit :
La figure suivante prsente un exemple de relais statique bien connu le MOC 341, ainsi que le
montage de base le mettant en uvre :
- Si l'unit de commande, ici matrialise par une porte NAND, fournit un 0 la sortie de cette
porte, la diode infrarouge conduit, ce qui fait conduire l'optotriac interne, qui son tour
commande le triac extrieur, qui devient comme un circuit ferm ; la charge (LOAD) est alors
alimente par 240V AC
- Le relais est muni du systme "zero crossing", ce qui vite de commander le triac quand la
tension secteur est grande, ce qui vite des parasites de commutation.
Alimentation
Charge
G
TR
A1
A2
V
GA2
Le triac TR se comporte comme un interrupteur command :
- Si V
GA2
= 0, TR est bloqu (circuit ouvert), la charge
n'est pas alimente ;
- Si V
GA2
= 1V, TR conduit (circuit ferm : sa tension
V
A1A2
est ngligeable), la charge est alimente.
Fonctionnement simplifi dun TRIAC
FONCTI ON - Di st ri buer
32
2. LE CONTACTEUR
2.1. Principe :
Un contacteur est un relais lectromagntique particulier,
pouvant commuter de fortes puissances grce un dispositif
de coupure darc lectrique. Sa commande peut tre continue
ou alternative. Sa constitution est comme suit :
- Des ples principaux de puissance ;
- Un contact auxiliaire (avec possibilit d'additionner
au contacteur un bloc de contacts auxiliaires
instantans ou temporiss) ;
- une armature fixe et un autre mobile ;
- Un ressort de rappel ;
- Un circuit magntique ;
- Une bobine de commande du contacteur. Si la
bobine est alimente elle attire larmature mobile
pour actionner les ples de puissance ; Si elle nest
pas alimente, un ressort de rappel ouvre les ples
de puissance.
2.2. Caractristiques lectriques :
- Tension nominale demploi Ue : Cest la tension entre deux ples de puissance qui ne
provoque ni chauffement ni dtrioration du contacteur.
- Courant nominale demploi Ie : Cest le courant qui peut circuler dans les ples de puissance
sans provoquer ni chauffement ni dtrioration du contacteur.
- Courant thermique conventionnel (Ith ) : courant qu'un contacteur en position ferme peut
supporter pendant 8 heures sans que l'chauffement de la bobine ne dpasse 90C.
- Pouvoir de coupure : courant maximal que le contacteur peut couper.
2.3. Catgories de fonctionnement et choix :
Pour choisir un contacteur il faut tenir compte, en plus des caractristiques prcdentes, des
catgories demploi. Une catgorie demploie dfinit, pour lutilisation normale dun contacteur, les
conditions dtablissement et de coupure du courant, en fonction du courant nominal demploi "Ie" et
de la tension nominale demploi "Ue" ; elle dpend :
- De la nature du rcepteur contrl (rsistance, moteur cage, moteur bagues, etc.).
- Des conditions demploi dans lesquelles seffectuent les fermetures et les ouvertures
( moteur lanc ou cal, en cours de dmarrage, freinage par contre courant , etc. ).
En alternatif En courant continu
Catgorie Utilisation Catgorie utilisation
AC1 Rsistance DC1 Rsistance
AC2 Moteur asynchrone bague DC2 Moteur Shunt
AC3 Moteur asynchrone cage. DC3
Dmarrage et freinage par contre
courant des moteurs Shunt
DC4 Moteurs srie
AC4
Moteurs asynchrone cage et
bagues
- Inversion du sens de marche
- Freinage par contre courant
- Marche par coups
DC5
Dmarrage et freinage par contre
courant des moteurs srie
Chapi t re 1 - Les pract i onneurs l ectri ques
33
Pour choisir un contacteur on utilise gnralement les guides de choix proposs par les
constructeurs :
Exemple de choix : Un circuit de chauffage est compos par deux charges rsistives triphass.
Chaque charge consomme un courant de 10A par phase sous une tension U = 380V.
Il sagit de la catgorie de fonctionnement AC1. Sur le guide de choix on peut opter pour le
contacteur suivant :
LC1-D09 A65
2.5. Schmas de mise en uvre :
Pour alimenter la bobine dun contacteur on peut utiliser lun des deux montages suivants :
Si on appuie sur le bouton poussoir MA la bobine du contacteur est alimente et ferme le contact
K. Mme si on relche le bouton poussoir la bobine reste alimente (automaintien). Pour couper
lalimentation il suffit douvrir le bouton poussoir AR.
Gnralement, dans une chane dnergie lectrique, le practionneur ne sutilise pas seul, mais
associ une classe dappareillage typique : sectionneur, relais thermique, etc.
3. LE SECTIONNEUR
Le sectionneur est un appareil de connexion qui permet d'isoler (sparer lectriquement) un circuit
pour effectuer des oprations de maintenance ou de modification sur les circuits lectriques qui se
trouvent en aval. Ainsi il permet dassurer la scurit des personnes qui travaillent sur le reste de
linstallation en amont.
Le sectionneur ne possde aucun pouvoir de coupure, par consquent, il ne doit pas tre manuvr
en charge.
AR
MA
Commande par interrupteur
Commande par deux poussoirs (la plus utilis)
K
FONCTI ON - Di st ri buer
34
On trouve galement des sectionneurs qui servent en plus de porte-fusible. On les dsigne par
"Sectionneurs porte-fusible" :
4. LES FUSIBLES
Les fusibles sont des appareils de protection dont la fonction est
douvrir un circuit par fusion dun lment calibr, lorsque le
courant dpasse une valeur prcise, pendant un temps donn. On
trouve :
- La classe gI ou gG : ce sont les fusibles dusage gnral ;
ils protgent contre les surcharges et les courts-circuits.
- La classe aM : ce sont les fusibles daccompagnement Moteur prvus pour la protection contre les
courts-circuits et surtout pour la protection des moteurs.
5. LE RELAIS THERMIQUE
Le relais thermique est un appareil de protection capable de
protger contre les surcharges prolonges. Une surcharge est une
lvation anormale du courant consomm par le rcepteur (1 3 In),
mais prolonge dans le temps, ce qui entrane un chauffement de
l'installation pouvant aller jusqu' sa destruction. Le temps de coupure
est inversement proportionnel l'augmentation du courant.
Le relais thermique utilise la proprit d'un bilame form de deux lames minces ayant des coefficients
de dilatation diffrents. Lapparition dune surcharge se traduit par laugmentation de la chaleur (effet
joule) ; Le bilame dtecte l'augmentation de chaleur, se dforme et ouvre le contact auxiliaire.
Symbole
Contact
command
Sectionneur Simple
Sectionneur avec fusibles incorpors
Chapi t re 1 - Les pract i onneurs l ectri ques
35
Ce contact tant convenablement plac dans le circuit de commande va couper l'alimentation de la
bobine du contacteur qui va ouvrir ses ples de puissances et interrompre le passage de l'nergie
lectrique au travers du rcepteur. Cest donc l'appareillage de commande qui coupe le circuit de
puissance est non pas le relais thermique.
E X E R C I C E R E S O L U
EXERCICE N1 :
Pour distribuer lnergie vers lactionneur, typiquement un moteur triphas, le schma suivant est
gnralement adopt. Dcrire le fonctionnement du montage :
EXERCICE N2 :
Lorsqu'on a commander plusieurs
relais, on a besoin donc de
plusieurs transistors. Pour diminuer
la surface du circuit imprim, on
utilise des circuits intgrs
contenant plusieurs transistors de
commande ; ce en plus des
montages Darlignton. On donne
titre d'exemple le ULN 2003.
Donner alors le montage de
commande d'un relais avec ce
circuit.
Bilame non dforme
d = dformation due lchauffement
provoque par le passage du courant.
FONCTI ON - Di st ri buer
36
CORRIGE :
EXERCICE N1 :
- Si le bouton poussoir S1 du circuit de commande est actionn, la bobine du contacteur KM1 est
alimente ; le contact KM1 du circuit de commande se ferme ainsi que les contacts KM1 du
circuit de puissance, ce qui entrane la rotation du moteur MAS ;
- Si S1 est relch le contact KM1 du circuit de commande maintient lalimentation de la bobine
du contacteur (mmorisation). On parle alors dauto maintien ;
- Pour arrter le moteur MAS, on appuie sur le bouton poussoir Ar, ce qui ouvre le circuit de
commande ; la bobine KM1 nest plus alimente et les contacts KM1 (commande et puissance)
sont ouverts ;
- Si au cours du fonctionnement (KM1 ferm) il y a une surcharge le relais thermique F
schauffe, le contact qui lui est associ F souvre, ce qui ouvre le circuit de commande et
protge le moteur MAS ;
- Le sectionneur porte fusible a aussi un contact auxiliaire not Q qui souvre avant les contacts
Q du circuit de puissance e, cas o on manuvre le sectionneur en charge ; ceci a le mme
effet que le contact auxiliaire du relais thermique. Ce contact est appel contact de
prcoupure .
EXERCICE N2 :
E X E R C I C E S N O N R E S O L U S
EXERCICE N1 :
A fin de minimiser le courant de dmarrage dun moteur asynchrone, on utilise un dmarrage
rsistances statoriques. Au dmarrage lalimentation du moteur se fait via ces rsistances. Aprs une
temporisation T on court-circuite ces rsistance pour liminer leurs effets, le moteur est alors alimenter
directement avec le rseau. Donner le circuit de puissance et de commande.
EXERCICE N2 :
Donner un branchement des relais avec le
moteur pour que la commande de lun des
deux relais permet de commander la
rotation du moteur dans un sens ; et la
commande de lautre permet de le faire
tourner dans lautre sens.
Une utilisation de ce montage est la
commande dun store automatis.
M
Chapi t re 2 - Hacheur sri e Vari at eur de vi tesse i ndust ri el
37
Chapitre 2
HACHEUR SERIE / VARIATEUR DE VITESSE INDUSTRIEL
1. PRINCIPE DE FONCTIONNEMENT :
1.1. Structure :
La structure adopte gnralement pour un hacheur est la suivante :
1.2. Fonctionnement :
Le fonctionnement dun hacheur comprend deux phases principales : phase active et phase de roue
libre :
- Phase active : transistor passant et la diode de roue libre bloque ; la pleine tension E est
applique la charge.
- Phase de roue libre : le transistor est bloqu et la diode est passante. La tension est nulle aux
bornes de la charge jusqu ce que la diode devienne bloque.
Pour arriver cette fin la base du transistor doit tre
alimente par un signal rectangulaire de la forme :
1.3. Caractristiques lectriques :
1.3.1. Charge R :
La charge est purement rsistive : donc si le transistor est satur la tension de sortie U = E, et si le
transistor est bloqu la tension de sortie est nulle (lutilisation de la diode de roue libre nest pas
ncessaire) :
On appelle valeur moyenne de la tension u laire A entre le trac de celle-ci ( u(t) ) et laxe de
temps divis par la priode T. De ce fait la valeur moyenne de la tension de sortie est :
U = (o.T.E)/T soit U = o.E
Phase
active
Phase de
Roue libre
T
U
La diode de roue libre assure la
continuit du courant dans la charge
si celle-ci est inductive (bobine ou
moteur courant continu) quand le
transistor est bloqu.
Transistor
command
Diode de
roue libre
E
Charge
T
U
oT
E
A
T
E
R U
FONCTI ON - Di st ri buer
38
On peut remarquer que laction sur la valeur moyenne de la tension U se fait par lintermdiaire du
rapport cyclique o.
Nota : laction sur la tension U permet de modifier lclairage dune lampe, la chaleur dun
chauffage, etc.
1.3.2. Charge E-R :
La valeur moyenne de ce signal de sortie est : Umoy = (o.T.E +(1-o).T.E
C
)/T soit U = o.E +(1-o).E
C
1.4. Exemple de circuit de commande :
Le circuit de commande doit gnrer un signal rectangulaire dont le rapport cyclique est ajustable.
Le fonctionnement du systme est comme suit :
- Le circuit IC1 est un oscillateur gnrant des impulsions
d'une dure courte et d'une frquence de 100 Hz ;
- Ce signal dclenche un monostable base de IC2. La
temporisation est assure par C3 qui se charge
linairement travers le gnrateur de courant autour
du transistor T1 ;
- Les seuils des comparateurs ne sont pas fixes par Vcc1
(1/3 Vcc1 et 2/3 Vcc1), mais par la tension U
sur
l'entre (5), ce qui a pour effet de varier la dure
mtastable du monosatable T
W
en fonction de cette
tension.
- Si le transistor est passant la tension de
sortie U=E
- Si le transistor est bloqu le courant
circulant dans la charge est nulle et par la
suite la tension U=E
C
.
T
U
oT
E
E
C
T
E
R
U
Ec
4 8
7 3
6
2
1
1
V
CC1
(12 V)
IC1
NE555
NE555
R4
C3
R5
R6
AJ1
P1
T1
T2
4 8
2 3
6
7 5 1
C2
IC2
NE555
A
B
C
U
V
CC2
(5 V)
U
MCC
I
0
MCC
A
t
E
t
8 V
D
t
T
W
E
0
T
Chapi t re 2 - Hacheur sri e Vari at eur de vi tesse i ndust ri el
39
2. VARIATEURS INDUSTRIELS POUR MOTEUR A COURANT CONTINU :
2.1. Structure et principe de fonctionnement:
Un variateur de vitesse est un appareil qui permet de commander la vitesse de rotation dun moteur
courant continu. La structure dun tel dispositif est gnralement la suivante :
2.2. Caractristiques :
Les principales caractristiques dun variateur de vitesse industriel sont :
- Tension rseau lectrique : exemple 220/240V / 50-60Hz.
- Tension dinduit : exemple 150V pour un rseau triphas de 220V.
- Calibre variateur courant induit : exemple 12A.
- Consigne de vitesse :exemple +/- 10V (vitesse minimale/vitesse maximale).
- Rgulation : exemple Vitesse et couple.
- Retour de vitesse : exemple dynamo tachymtrique.
2.3. Exemple de raccordement standard :
Convertisseur de
puissance
(Hacheur, Redresseur)
Rseau
lectrique
Carte lectronique de
commande
M
DT
Dynamo Tachymtrique
(mesure de la vitesse)
Ou codeur optique
Capteur
de courant
Variateur de vitesse
Consigne
de vitesse
FONCTI ON - Di st ri buer
40
Description du montage :
- Le variateur est aliment par le rseau lectrique (entre L1 et L2/N).
- Linduit du moteur est connect aux sorties de puissance A1 et A2.
- La dynamo tachymtrique DT donne une image de la vitesse de rotation de la machine
courant continu.
- Le potentiomtre RF permet de choisir la vitesse dsire (linairement).
- Le bouton poussoir Marche permet de lancer le moteur (avec automaintien) ; le bouton arrt
permet de lancer le procd de freinage.
E X E R C I C E R E S O L U
Pour le montage de commande base du NE555 prcdant :
1. Montrer que le courant de charge de C3 est constant. On appelle ce courant I
0
.
2- Donner alors la loi de variation de la tension de C3. On appelle cette tension U
C3
. On suppose que la
constante d'intgration est nulle (condensateur dcharg).
3- Tracer la forme de la tension U
C3
.
4- Montrer qu'on a : Tw = C3. U
/I0.
5- Montrer que la valeur moyenne du signal commandant la MCC est de la forme :
UMCC = (VCC1.C3/T.I0). U.
6- Conclure alors.
CORRIGE :
1. IO = (VCC1 VCC2 VBE)/(R6+RAJ1). Toutes les composantes de cette quation sont des
constantes alors Io est constant.
2. On sait que Io = C3.(dUC3/dt) alors : UC3 = (Io/C3).t.
3. le trac de la tension UC3 :
4. De ce qui prcde on peut crire : UO = (Io/C3).TW donc TW = (UO . C3) /Io.
5. UMCC = VCC1.TW/T en remplaant TW par son expression on peut crire :
UMCC = (VCC1.C3/T.I0). U.
6. Laction sur la rsistance ajustable AJ1 permet de varier le courant Io et par la suite varier
la tension de commande du moteur, ce qui agit sur la vitesse de rotation du moteur.
UO
TW T
Chapi t re 3 - Les pract i onneurs pneumati ques
41
CHAPITRE 3
LES PREACTIONNEURS PNEUMATIQUES
1. FONCTION :
Ils ont pour fonction essentielle de distribuer l'air sous pression aux diffrents orifices des actionneurs
pneumatiques. Comme le contacteur est associ un moteur lectrique, le distributeur est le pr-
actionneur associ un vrin pneumatique :
2. CONSTITUANTS D'UN DISTRIBUTEUR :
On peut comparer un distributeur un robinet que lon ouvre et fermer non pas la main, mais par
des ordres donns par la PC.
Il est constitu dune partie fixe (le corps) et dune partie mobile (le tiroir) qui peut se dplacer
lintrieur de la partie fixe selon un ordre directe (manuelle) ou indirecte (provenant de la PC). Le tiroir
est dot de conduites permettant le passage de lair entre les diffrents orifices de la partie fixe.
3. LES PRINCIPAUX DISTRIBUTEURS PNEUMATIQUES:
Un distributeur est caractris :
- Par son nombre d'orifices, c'est dire le nombre de liaisons qu'il peut avoir avec
son environnement (arrive, sortie(s) et chappement de la pression) ;
- Par son nombre de positions que peut occuper le tiroir.
Tiroir
Partie fixe
Energie
pneumatique
Energie vers
actionneurs
Ordre de non distribution
Ordre de distribution
Position 1
Position 2
Distributeur pneumatique
Distributeur
Energie
pneumatique
Energie
pneumatique
distribue
Distribuer
l'nergie
Ordres
Rle dun distributeur pneumatique
FONCTI ON - Di st ri buer
42
Le nom et la reprsentation d'un distributeur dcoulent de ces deux caractristiques. Chaque position
est symbolise par un carr dans lequel figurent les voies de passage de l'air comprim :
Exemples :
Distributeur 3/2
- En position repos, lorifice dalimentation du
vrin est reli lorifice dchappement : la
tige est maintenue donc rentre ;
- En position travail, provoque par un ordre
de la PC, lorifice dalimentation du vrin
est mis en liaison avec la source dair
comprim. Par consquent, la tige sort.
Distributeur 5/2
Suivant la position occupe, lair comprim est
verrouill vers lun des deux orifices
dalimentation du vrin tandis que lautre est
lchappement.
4. LES DISPOSITIFS DE COMMANDE :
La commande du distributeur a pour fonction de
positionner le tiroir dans une position ou dans lautre. Elle
peut tre lectromagntique, pneumatique,
lectropneumatique ou manuelle. On parle :
- Dun distributeur monostable si le retour du tiroir sa
position initiale est assur par un ressort de rappel ;
- dun distributeur bistable si le tiroir reste dans l'tat
que lui a impos le dernier ordre envoy par la PC
Orifice dchappement
Orifice dalimentation
Orifice dutilisation
Pression
Echappement
Vers actionneurs
Ordre
Case 1 Case 2
Distributeur commande lectrique
Chapi t re 3 - Les pract i onneurs pneumati ques
43
La commande du distributeur est reprsente par un rectangle accol la case quelle commute et
complte par un ou plusieurs symboles schmatisant la technologie utilise.
La figure suivante donne la schmatisation des diffrents dispositifs de commande :
Exemples: distributeur pilotage pneumatique
5. APPLICATION: PRESSE PNEUMATIQUE
Dans une presse pneumatique on a le cycle suivant:
Un appui sur un bouton poussoir (Bp1) : descente de la tige du vrin
Un appui sur un bouton poussoir (Bp2) : rentre de la tige du vrin
Le schma ci -dessus montre le cblage du vrin pneumatique de la presse avec le distributeur
bistable 5/2:
Commande
manuelle
Commande
manuelle
par poussoir
Rappel par
ressort
Commande
lectropneumatique
Commande
pneumatique
Commande
lectrique
Distributeurs sur leur embase
Bp1 non actionn
Bp2 actionn
Arriv de la
pression
Vrin
double effet
Rentre de la tige du vrin
Bp2 non actionn
Sortie de la tige du vrin
Bp1 actionn
FONCTI ON - Di st ri buer
44
E X E R C I C E N O N R E S O L U
Dans une usine de fabrication de voiturettes miniature, on dsire le fonctionnement suivant :
- Loprateur place sur un gabarit le chssis, les essieux de roues avant et arrire, ainsi que la
coque.
- Lorsque cela est prt, il appuie sur un bouton poussoir, ce qui a pour effet de faire descendre le
vrin de sertissage, qui remonte ds quil est arriv en bout de course.
En appelant
V+ le mouvement de sortie de tige
V- le mouvement de rentre de tige
h le capteur haut
b le capteur bas
m le bouton poussoir,
La premire quation scrit :
V+ = h.m
La deuxime quation scrit :
V- =b
1. Etablir le schma de cblage en utilisant un distributeur bistable 5/2 et un vrin double
effet.
2. Modifier le cblage de manire ce que la sortie du vrin ne se fasse quaprs appui
simultan sur deux boutons poussoirs m et r (pour amliorer la scurit, loprateur devra
appuyer sur un bouton avec chaque main, de manire viter doublier une main sous le
vrin).
N.B les capteurs a et b sont des capteurs pneumatiques (distributeur 2/2).
m
h
b
45
Dans un systme automatis, souvent la finalit de l'action sur la matire d'uvre est de
nature mcanique. Puisque l'nergie souvent disponible est lectrique et moins encore
pneumatique, alors il faut convertir cette nergie disponible en nergie mcanique ; do
lutilisation des actionneurs qui assurent cette fonction de conversion.
La position d'une telle fonction dans une chane d'nergie, ainsi que sa fonction globale
sont reprsentes par les figures suivantes :
Energie Practionneur Energie mcanique
Electrique Moteur Rotation
Pneumatique Verin Translation
UNITE ADC
FONCTION
C O N V E R T I R
PRESENTATION
COMPETENCES ATTENDUES
A partir de tout ou partie dun produit support avec son cahier des charges et son dossier
technique :
Enoncer le principe de fonctionnement dun convertisseur
Mettre en uvre un convertisseur
CHAPITRES INCLUS DANS LA FONCTION CONVERTIR
Convertisseur lectromcanique
Convertisseur pneumatique
Autres types de convertisseur
ALIMENTER
U N I T E A D C
TRANSMETTRE AGIR
Matire
duvre en
entre
Matire
duvre en
sortie
nergie
dentre
Convertir
lnergie
C H A N E D N E R G I E
DISTRIBUER CONVERTIR
Energie
disponible
Energie
distribue
FONCTI ON - Convert i r
46
CHAPITRE 1
CONVERTISSEUR ELECTROMECANIQUE
INTRODUCTION :
Cest un convertisseur permettant de convertir lnergie lectrique (courant
continu) en rotation mcanique. Cest le moteur le plus simple mettre en
uvre. Il trouve son utilisation, entre autres dans :
- Llectronique de faible signaux (radio, video, entranement en rotation
de la parabole, etc.) ;
- La traction lectrique.
1. ORGANISATION DE LA MACHINE :
Dans lorganisation dune machine courant continu, on
peut distinguer les principaux lments suivants :
- les ples inducteurs avec leurs enroulements ou leurs
aimants, placs gnralement sur le stator (partie
fixe)
- linduit, dont les diffrentes voies denroulements
sont connectes au collecteur, lensemble tant
gnralement plac sur le rotor (partie tournante)
- les organes mcaniques permettant la rotation du
rotor et le maintien des diffrents sous ensembles.
2. PRINCIPE DE FONCTIONNEMENT :
2.1. Loi de Laplace :
Un conducteur travers par un courant et plac dans un champ magntique est soumis une force
dont le sens est dtermin par la rgle des trois doigts de la main droite.
F = B x I x L
F : Force en Newtons
B : Induction magntique en teslas
I : Intensit dans le conducteur en ampres
L : Longueur du conducteur en mtres
Pour dterminer le sens de la force, il faut placer les trois doigts
(pouce, index, majeur) perpendiculairement entre eux.
Le pouce se place dans le sens du champ (le sens des lignes d'induction est toujours du N au S
l'extrieur d'un aimant et du S au N l'intrieur).
Le majeur se place dans le sens du courant (sens conventionnel toujours du + vers le -).
L'index dtermine alors le sens de la force.
Stator Rotor
Chapi t re 1 - Convert i sseur l ectromcani que
47
2.2. Principe de fonctionnement dun moteur courant continu :
Lorsque l'on place une spire parcourue par un courant (grce aux balais et au collecteur) dans un
champ magntique, il apparat un couple de forces. Ce couple de forces cre un couple de rotation qui
fait dvier la spire de plus ou moins 90 degrs par rapport au plan vertical, le sens du courant restant
inchang dans la spire, au cours de ce dplacement, le couple de rotation diminue constamment
jusqu' sannuler aprs rotation de la bobine de plus ou moins 90 degrs ( zone neutre, la spire se
trouve l'horizontale et perpendiculaire aux aimants naturels).
Afin d'obtenir une rotation sans coup, l'enroulement dinduit doit tre constitu d'un nombre lev
de spires similaires. Celles-ci seront rparties de faon rgulires sur le rotor (induit), de manire
obtenir un couple indpendant de langle de rotation. Aprs le passage de la zone neutre, le sens du
courant doit tre invers simultanment dans chacune de ces spires.
L'inversion du courant est opre par linverseur ou commutateur (collecteur) qui, associ au balais,
constitue l'lment assurant la transmission du courant de la partie fixe la partie tournante du
moteur.
2.3. Force contre lectromotrice induite :
Cette spire est le sige dune fcem (force contre lectromotrice) E qui dpend de la structure de la
machine :
E = (p/a) . N . n .
P : nombre de paires de ples inducteurs.
a : nombre de paires de voies de conducteurs dans linduit.
N : nombre de conducteurs actifs.
n : vitesse de rotation du rotor en tr/s.
: flux sous un ple.
Si le flux est constant cette fcem peut scrire :
E = k . n
Remarque :
Une machine courant continu (MCC) nest plus constitue par une seule spire mais par
plusieurs spires mises en srie selon la reprsentation suivante :
2.4. Couple lectromagntique :
La puissance lectromagntique totale est le produit fcem avec le courant induit I : Pe=E.I. Or on
sait que la relation qui lit le couple avec la puissance est : C=P/O (avec O est la vitesse de rotation en
rd/s). Et puisque O = 2t.n (avec n est la frquence de rotation en tr/s). Donc :
C = (k/2t).I (pour un flux constant)
Balais
Collecteur
Une
section
FONCTI ON - Convert i r
48
3. MODELE ELECTRIQUE SIMPLE DU MOTEUR A COURANT CONTINU :
On peut crire la loi dohm lectrique (on suppose que linducteur est aimant permanent ou aliment
par une tension continu constante, ce qui revient supposer que le flux est constant).
U = E + R.I
E = k.n
C = (k/2t).I = k.I
Si on suppose que le moteur est aliment avec une tension constante U. On peut tracer la
caractristique mcanique C=f(n) du moteur :
C = k.I = k. (U E)/R
U k.n
C = k.(
R
-
R
)
Cette caractristique est
reprsente dans la courbe ci contre :
On peut aussi tracer la caractristique lectrique U = f(I)
la vitesse nominale :
U = E + R.I
4. DEMARRAGE DU MOTEUR A COURANT CONTINU :
4.1. courant de dmarrage :
Au dmarrage la vitesse est nulle donc n = 0. Donc E = 0. On peut alors crire :
U = R.I
D
(I
D
: courant au dmarrage).
Pour les grosses machines R est faible (de lordre de quelques diximes dOhms) et pour les petits
moteurs cette rsistance est relativement grande. Ce qui impose de prvoir un circuit permettant de
minimiser ce courant lors de dmarrage des grosses machines.
Inducteur
R
E
Induit
Re
U
C
Cd
Cn
n
n
n
Cd : couple de dmarrage.
Cn : couple nominal.
n
n
: vitesse de rotation nominale.
U
E
Un
I
In
Chapi t re 1 - Convert i sseur l ectromcani que
49
4.2. circuit de dmarrage :
Pour minimiser I
D
on peut :
- Soit dmarrer avec une tension U faible (Dmarrage
tension rduite).
- Soit ajouter une rsistance en srie avec linduit lors du
dmarrage (Rhostat de dmarrage) (voir figure ci
contre).
5. BILAN DES PUISSANCES :
5.1. Lensemble des pertes :
Dans un moteur courant continu on peut distinguer les pertes suivantes :
- Pertes mcaniques : dues aux frottements et la rsistance arodynamique du ventilateur.
- Pertes magntiques : dues aux pertes dans le circuit magntique (pertes par hystrsis,
pertes par courant de Faucoult).
- Pertes Joules : pertes dans les rsistances de linduit et de linducteur
Pj = R.I
2
+ Re.Ie
2
~ R.I
2
.
La somme des pertes mcanique et des pertes magntiques sappelle pertes constantes (Pc).
5.2. Le rendement :
On appelle le rendement le rapport entre la puissance absorbe et la puissance utile :
- La puissance absorbe : Cest la puissance lectrique absorbe par le moteur.
Pa = U.I
- La puissance utile : Cest la puissance mcanique disponible sur larbre du moteur.
Pu = Pa Somme(pertes).
Pu = Pa (Pc + Pj).
- Le rendement scrit :
Pu
q =
Pa
6. REVERSIBILITE DE LA MACHINE A COURANT CONTINU :
La loi de Faraday nonce que si un conducteur se
dplace dans un champ magntique il est le sige
dune fem (force lectromotrice) induite qui
reprsente la variation du flux dans le temps travers
cette spire.
De ce principe dcoule le fonctionnement en
gnratrice de la machine courant continu.
Si larbre de la gnratrice est entrane en rotation,
entre les bornes de linduit on peut mesurer une
tension U proportionnelle la vitesse de rotation.
Une application trs connue de ce fonctionnement
est la dynamo de la bicyclette.
FONCTI ON - Convert i r
50
7. ALIMENTATION DU MOTEUR :
8. FONCTIONNEMENT A VITESSE VARIABLE :
On peut envisager plusieurs cas dans lesquels on a besoin de faire
fonctionner le moteur courant continu vitesse variable. Pour arriver
ce rsultat, une mauvaise solution (mais qui est quand mme
applicable dans certains application ou la notion de pertes nest pas
primordiale) consiste mettre une rsistance variable en srie avec le
moteur. La vitesse maximale est atteinte en prenant R
V
= 0.
Une deuxime solution consiste utiliser un hacheur. Dans ce cas
laction sur le rapport cyclique permet de varier la valeur moyenne de
la tension de commande et par la suite la variation de la vitesse de
rotation du moteur.
E X E R C I C E R E S O L U
Les caractristiques dune MCC excitation spare accouple une charge mcanique sont les
suivantes :
Flux constant k = 4.8 ; rsistance dinduit R = 0.5 ; couple de pertes collectives Tp = 1 mN
(constant quelque soit la vitesse) ; la charge mcanique accouple oppose un couple rsistant
Tr de 10 mN 157.08 rad/s.
1. Calculer le courant de dmarrage (sans circuit de dmarrage) de la machine si la tension
U=120v.
2. Calculer la FCEM E pour la vitesse 157.08 rad/s.
3. Calculer les pertes joules de la machine. En dduire le rendement.
CORRIGE :
1. ID = U/R AN ID = 240 A.
2. E = (k/2t).O = 0.764 x 157.08 AN E = 120 V.
3. Il faut tout dabord calculer le courant dinduit :
I = 2. t.C/k AN I = 13 A.
Donc Pj = R.I2 AN Pj = 85.6 W.
Pour calculer le rendement on doit tout dabord calculer la puissance absorbe :
Pa = U.I AN Pa = 1560 W.
Calcul des pertes constantes :
Pc = Tp. O AN Pc = 157.08 W.
Donc q = (Pa-Pc-Pj)/PaAN q = 84.4 %
M
U
R
V
M
U
Pour inverser le sens de
rotation il suffit dinverser
la tension dalimentation du
moteur : selon la position
des commutateurs 1 et 2 le
moteur tourne soit dans le
sens 1 soit dans le sens 2.
M
1
2
Montage avec un seul sens de marche
Montage avec deux sens de marche
Chapi t re 1 - Convert i sseur l ectromcani que
51
E X E R C I C E S N O N R E S O L U S
Exercice 1 :
Une mthode pour freiner le moteur courant continu consiste le brancher sur une rsistance R. Cette
technique quon appelle freinage rhostatique permet dacclrer le freinage.
Donner un montage avec contacteurs permettant un dmarrage deux sens de marche avec un freinage
rhostatique. La console de commande contient 4 boutons poussoirs :
- S1 : Marche sens 1.
- S2 : Marche sens 2.
- Fr : Freinage rhostatique.
- Au : Arrt durgence (Couper lalimentation et laisser le moteur ralentir).
Exercice 2 : ETUDE DUNE MACHINE A COURANT CONTINU
Caractristiques
- Inducteurs aimants permanents
- Induit : rsistance R = 4,0 O
- constante de f..m. et de couple : k = 0,30 V.s.rad
-1
- intensit nominale : In = 4,0 A
Les frottements ainsi que les pertes dans le fer seront ngligs.
On notera en outre :
Ce le moment du couple lectromagntique,
O la vitesse angulaire de rotation,
n la frquence de rotation en tr/s,
E la FEM ; E = k O ,
U la tension aux bornes de la machine,
1.1. Etablir l'expression du moment du couple lectromagntique,
1.2. Pour le courant nominal d'intensit In, calculer les valeurs numriques de la tension d'alimentation
U et du moment du couple lectromagntique pour les frquences de rotation
a) n = O b) n = 50 tr/s
1.3 On applique sur larbre de la machine, un couple rsistant, de moment C
R
= 0, 80 N.m.
1.3.1. Quelle relation lie les moments des couples lectromagntique et rsistant en rgime
permanent ?
1.3.2. Dterminer la relation exprimant O en fonction de U, R, k et C
R
en rgime permanent.
1.3.3 A partir de quelle valeur de lintensit I, le moteur peut-il dmarrer ? Quelle est la
tension U correspondante ?
1.4 Quelle tension U maximale doit-on simposer au dmarrage pour que lintensit I
d
de dmarrage
demeure infrieure 1.25 In ?
M
O
I U
U
M
R
Rotation
Freinage
M
U
FONCTI ON - Convert i r
52
CHAPITRE 2
LES ACTIONNEURS PNEUMATIQUES
INTRODUCTION :
Un actionneur pneumatique est un dispositif qui transforme
lnergie de lair comprim en travail mcanique. Parmi les
actionneurs pneumatiques les plus utiliss dans les systmes
automatiss on trouve :
- le vrin pneumatique ;
- le gnrateur de vide Venturi.
1. LES VERINS :
Ce sont les actionneurs qui ralisent des mouvements gnralement linaires l'endroit mme o on a
besoin d'une force.
Exemples: perceuse, porte autobus, presse (figure ci-dessus), etc.
1.1. Constitution et principe de fonctionnement :
Un vrin est constitu dun cylindre, ferm aux deux extrmits, lintrieur duquel se dplace
librement un piston muni dune tige, sous leffet des forces dues la pression de lair comprim. Pour
faire sortir la tige, on applique la pression sur la face arrire du piston et pour la faire rentrer, on
applique la pression sur la face avant :
Constitution dun vrin pneumatique
1
2 3
4
5
1 orifice de raccordement
2- tube ferm par les flasques
3- piston
4- orifice de raccordement
Presse pneumatique
Energie
lectrique
Modle fonctionnel dun vrin
TRANSFORMER
LENERGIE
Energie
pneumatique
Vrin
Vrin standard
Chapi t re 2 - Acti onneurs pneumat i ques
53
1.2. Types usuels des vrins:
1.2.1.Vrin simple effet:
Ce vrin produit leffort dans un seul sens. Il nest donc aliment que dun seul cot. Le retour la
position initiale seffectue en gnral par un ressort.
1.2.2 Vrin double effet :
Dans un vrin double effet, la sortie et la rentre de la tige seffectue par lapplication de la
pression, alternativement, de part et dautre du piston. Les vrins double effet sont utiliss
lorsquon a besoin deffort important dans les deux sens.
Remarque : Dans les vrins on peut trouver
dautres fonctions complmentaires tel
que : amortissement de fin de course,
capteur de position, dispositifs de
dtection, etc.
1.3. Vrins spciaux
Vrins sans tige
Vrins rotatifs
Vrins compacts
Symbole
Air
Effort
Air
Air
Efforts
Symbole
Vrin pneumatique avec capteur de fin de course (ILS)
FONCTI ON - Convert i r
54
1.4. Caractristiques et performances dun vrin :
Le fonctionnement dun vrin dpend des caractristiques suivantes :
- Le diamtre du piston ;
- La course de la tige ;
- La pression dalimentation.
Le choix et le dimensionnement dun vrin seffectuent en fonction de leffort transmettre.
Exemple:
Un vrin ayant un piston de diamtre D = 8 mm et
aliment par une pression de 6 bar (60000 Pa) fournit
un effort sortant: F = (pxxD) / 4 soit 3016 N.
1.5. Exemple d'utilisation des vrins pneumatiques:
2. LE GENERATEUR DE VIDE OU VENTURI :
Un gnrateur de vide ou venturi est un actionneur pneumatique dont le rle est de transformer
lnergie pneumatique en surpression en une nergie pneumatique en dpression.
Un venturi est compos
dun jecteur muni dune
conduite dair plus troite du
ct de lentre et dun
orifice, perpendiculaire la
conduite, servant connecter
la ventouse. Le passage de lair
comprim dans le conduit
provoque une dpression et
entrane avec lui lair prsent
dans lorifice perpendiculaire.
Par consquent, une aspiration
se produit au niveau de la
ventouse.
Air
comprim
Aspiration
Ejecteur
Symbole
Principe du venturi
Ventouse
D
jection
Marquage
Assemblage
Formage
Serrage
Transfert
Pivotement
Chapi t re 2 - Acti onneurs pneumat i ques
55
E X E R C I C E R E S O L U
Dans un autobus, le vrin utilis pour ouvrir ou fermer la porte
est un vrin double effet. Sachons que le diamtre:
du piston D=40mm ;
de la tige d=15mm ;
La pression est gale : P=6bar
1- Calculer :
a) l'effort thorique Fo pour ouvrir la porte.
b) l'effort thorique Ff pour fermer la porte.
2- Pour l'ouverture et la fermeture de la porte le chauffeur appuie sur deux boutons poussoirs
Bp1 Bp2. Etablir le schma de cblage du circuit pneumatique (vrin+distributeur+Bp1+ Bp2).
CORRIGE :
1- a) Fo= p x D/4 AN Fo = 754 N.
b) Ff=p x (D-d)/4 AN Ff = 648 N.
2-Voir le schma de cblage de la presse (chapitre practionneurs pneumatiques)
E X E R C I C E S N O N R E S O L U S
EXERCICE N1 :
Leffort de serrage que doit exercer un vrin de bridage est de 6500N. Si le diamtre dalsage D est de
125 mm, dterminer la pression thorique ncessaire.
EXERCICE N2 :
Soit une masse d'une charge de 700 kg soulever par un vrin V (avec lacclration de la pesanteur g =
9,81 m/s). Les pertes par frottements internes sont estimes 10%, la pression dalimentation en air est
de 600kPa. Si les forces dinertie et la contre-pression sont ngliges, dterminer le diamtre du piston.
EXERCICE N3 :
Calculer les efforts thoriquement dveloppables, en poussant et en tirant, dun vrin (D = 100 mm et
d = 25 mm) si la pression dutilisation est de 500 kPa. Refaire la question si les pertes par frottements sont
de 12 %.
FONCTI ON - Convert i r
56
CHAPITRE 3
AUTRES TYPES DE CONVERSION
1. CONVERSION ENERGIE ELECTRIQUE / ENERGIE LUMINEUSE :
Cette conversion est connue sous lappellation dclairage consiste en une transformation de lnergie
lectrique en rayonnement lumineux. Le matriel dclairage proprement dit comprend les lampes, leurs
accessoires de fonctionnement. Les diffrentes familles de lampes reprsentent des technologies
particulires qui les destinent tel champ dapplication plutt qu tel autre. On peut citer, titre
dexemple, les procds dclairages suivants :
1.1. Les lampes incandescence :
- C'est la lampe traditionnelle. Elle est constitue d'une ampoule en verre qui contient du gaz
(souvent l'azote ou l'argon). Un filament de tungstne est port trs haute temprature par le
courant lectrique qui le traverse, devient incandescent et met de la lumire.
- Les lampes incandescence existent en une trs grande varit de formes, couleurs et puissances.
Puissance : 25 200 W
Dure de vie : environ 1000 h
1.2. Les lampes fluorescentes
- Plus connues sous l'appellation de tubes fluo ou tubes de non (bien qu'ils ne contiennent pas de
non), les lampes fluorescentes ont une forme de tube dans lequel la lumire est principalement
mise par des couches de substances luminescentes excites par une dcharge lectrique.
- diffrents diamtres et longueurs lis des puissances :
Diamtre 16 mm Diamtre 26 mm
Puissance 6W 8W 13W 15W 18W 30W 36W 58W
Longueur de tube 28cm 40cm 88cm 43,7cm 59cm 89,5cm 1,2m 1,5m
F
Interrupteur
Lampe
Ph N
Montage simple allumage
Ballast Tube fluorescent
Starter
Ph N
Chapi t re 3 - Aut res types de conversi on
57
1.3. Lampes fluo compactes :
Des lampes fluorescentes miniaturises dont : le tube de petit diamtre
est recourb pour tenir dans un volume rduit. Elles ressemblent, plus ou
moins des lampes classiques et elles s'utilisent sur des douilles vis.
- Puissance : 3 23 W.
- Dure de vie : 6000 12 000 h
- prix : 9 fois celui d'une ampoule incandescente standard
2. CONVERSION ENERGIE ELECTRIQUE / ENERGIE THERMIQUE :
Cette conversion est connue sous lappellation de chauffage consiste en une
transformation de lnergie lectrique en chaleur. Cette conversion est ralise laide des
rsistances de chauffage. La puissance consomme par une telle rsistance dpend de la
valeur de celle-ci. Cette transformation rsulte de l'effet Joule. Un quipement de
chauffage contient gnralement plusieurs rsistances chauffantes, dont la mise en srie ou
en parallle varie la puissance consomme, et par la suite varie la temprature.
Deux rsistances de mmes valeurs R montes en srie consomment une puissance :
P
2
= V
2
/(2R) = P/2 (P la puissance consomme par R seule)
Deux rsistances de mmes valeurs R montes en parallle consomment une puissance :
P
2
= V
2
/(R/2) = 2P (P la puissance consomme par R seule)
La majorit des chauffages commerciaux disposent dun commutateur trois positions permettant de
choisir entre trois puissances P, P
2
srie, P
2
parallle.
3. CONVERSION ENERGIE ELECTRIQUE / ENERGIE CHIMIQUE :
L'lectrolyse est un processus d'change au cours du quel l'nergie
lectrique est transforme en nergie chimique. La raction a lieu dans une
solution d'eau sale : l'lectrolyte. Les ions doivent pouvoir circuler
librement dans l'eau pour passer d'une lectrode l'autre. Les deux
lectrodes sont relies par l'lectrolyte et par un gnrateur de courant
lectrique. Cette unit est prsente dans le graphique ci-contre.
V R
I
La puissance dssip par cette rsistance
chauffante est :
P= V
2
/R = R I
2
Selon la position du commutateur Q on aura une allure de
chauffage :
Position 1 : R = (point neutre : pas de chauffage)
Position 2 : R = R
1
+R
2
(allure faible).
Position 3 : R = R
2
(allure moyenne).
Position 4 : R = R
1
//R
2
(allure forte).
Q
4
3
2
1
FONCTI ON - Convert i r
58
Si l'on applique un courant lectrique entre les deux lectrodes, les ions positifs migrent jusqu' la
cathode pendant que les ions ngatifs se dplacent en direction de l'anode. Les ions positifs sont appels
cations alors que les ions ngatifs sont eux appels anions.
Cette technique est utilise pour :
- Recharger les accumulateurs (chargeur de batteries).
- La purification des mtaux : Pour produire du cuivre trs pur, il faut installer une anode de
cuivre pollue qui sera nettoye par lectrolyse. Le cuivre est oxyd en ions Cu
2+
et prcipite
ensuite sur la cathode pour donner une couche de cuivre plus pure qu'auparavant.
- La galvanisation des mtaux oxydables : Un mtal altrable est protg contre la corrosion grce
au dpt par lectrolyse d'un mtal inaltrable. L'objet recouvrir est reli au ple ngatif d'un
gnrateur et plong dans un bain lectrolytique.
E X E R C I C E R E S O L U
Calculer la longueur du fil rsistant ncessaire pour raliser une rsistance de 2kW alimente sous 220V.
On optera pour un fil de Nickel-Chrome de diamtre 0.7mm et de rsistivit 75 x 10
-8
Om.
CORRIGE :
P = U.I = U2/R => R =U2/P = 24,2O.
R = .L/S => L = R.S/
S = t.(D/2)2 = 0,4. 10-6m2 => L = 12,9m
E X E R C I C E N O N R E S O L U
Une plaque lectrique de cuisinire est chauffe par trois rsistances. La puissance de ces rsistances est
successivement : 250W, 500W et 850W.
Si la tension dalimentation est U = 220V.
1. Calculer la valeur de chaque rsistance.
2. Quelle est la puissance minimale que peut consommer cette plaque chauffante.
3. Quelle est la puissance maximale que peut consommer cette plaque chauffante.
4. Donner les puissances possibles par association (srie ou parallle) de deux rsistances.
UNI TE ATC
59
UNI T ATC
Acqur i r - Tr ai t er - Communi quer
P R E S E N T A T I ON
P R E R E Q U I S
Concepts danalyse fonctionnelle : Systme, fonction global, FAST, etc.
Concepts relatifs la chane dnergie (constituants et grandeurs) :
Tension et courant lectriques ;
Pression ;
Contacteur, Moteur, etc.
Distributeur, Vrins, etc.
En prsence dnergie, pour agir correctement sur la matire d' uvre, un systme
automatis a besoin de recueillir les informations sur de la partie oprative pour grer les
actions.
Lunit ATC traite donc de ces aspects qui peuvent tre modliss par les fonctions
gnriques, c'est dire qui s'appliquent sur la plupart des systmes ; il s'agit des fonctions :
Acqurir les informations :
Issues de capteurs qui donnent des comptes-rendus sur l'tat du systme ;
Fournies par l'utilisateur ou d'autres systmes.
Traiter ces informations suivant des rgles et de lois physiques ;
Communiquer les rsultats de traitement sous forme :
D'ordre aux actionneurs pour agir sur la matire d' uvre ;
De messages l'utilisateur ou d'autres systmes.
Grandeurs
physiques
mesurer
U n i t A T C
nergies
dentre
ACQUERIR
TRAITER COMMUNIQUER
AGIR
Chane dinformation
Informations
destines dautres
systmes et aux
interfaces H/M
Ordres
Informations
issues dautres
systmes et
dInterfaces H/M
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
Matire d'uvre
en entre
Matire d'uvre en
sortie
Chane dnergie
60
UNITE ATC
FONCTION
A C Q U E R I R
COMPETENCES ATTENDUES
A partir de tout ou partie dun produit support avec son cahier des charges et son dossier
technique :
Enoncer le principe dacquisition et de conditionnement de donnes
Mettre en uvre un bloc dacquisition de donnes
CHAPITRES INCLUS DANS LA FONCTION AQUERIR
Les capteurs
Conditionnement de signal
Interfaces dentre / sortie
Dans un systme automatis, l'acquisition d'informations est la premire fonction
gnrique de la chane d'information. Elle permet principalement :
De lire l'tat des capteurs de la PO du systme
Recevoir les consignes de l'utilisateur du systme grce aux constituants de
dialogue.
La position de la fonction "Acqurir" dans une chane d'information, ainsi que les
diffrentes ralisations principales sont reprsentes par la figure suivante :
PRESENTATION
AQUERIR
Grandeurs
Consignes
physiques
,
Images
Informationnelles
utilisables
Ordres
Messages
Capteurs TOR
Interface homme/machine
Capteurs analogiques
Capteurs numriques
TRAITER COMMUNIQUER
Chapi t re 1 - Les capteurs
61
CHAPITRE 1
LES CAPTEURS
1. DEFINITION :
Un capteur est un composant technique qui dtecte un vnement physique se rapportant au
fonctionnement du systme (prsence d'une pice, temprature, etc.) et traduit cet vnement en un
signal exploitable par la PC de ce systme. Ce signal est gnralement lectrique sous forme d'un signal
basse tension. La figure 1 illustre le rle dun capteur :
L'information dtecte par un capteur peut tre d'une grande varit, ce qui implique une grande
varit de besoins en capteurs. On cite parmi les plus connus et frquents, les capteurs de position, de
prsence, de vitesse, de temprature et de niveau.
2. NATURE DE L'INFORMATION FOURNIE PAR UN CAPTEUR :
Suivant son type, Linformation quun capteur fournit la PC peut tre :
- Logique : Linformation ne peut prendre
que les valeurs 1 ou 0 ; on
parle alors dun capteur Tout
ou Rien (TOR). La figure 2
montre la caractristique dun
capteur de position :
- Analogique : Linformation peut prendre
toutes les valeurs possibles
entre 2 certaines valeurs
limites ; on parle alors dun
capteur analogique. La figure 3
montre la caractristique dun
capteur de temprature :
- Numrique : Linformation fournie par le capteur permet la PC den dduire un nombre binaire
sur n bits ; on parle alors dun capteur numrique. La figure 4 illustre le principe de
fonctionnement de la souris :
DETECTER
UN EVENEMENT
Grandeur physique
(Etat de la PO)
Signal lectrique
(Exploitable par la PC)
Fig. 1 : Rle gnral dun capteur
Signal logique
Temps
Prsence de la pice
Absence de la pice
1 (24V)
0 (0V)
Fig. 2 : Exemple dun capteur TOR
Tension (V)
Temprature (C)
La tension varie de faon
continue entre 0 et 5V
5
100
Fig. 3 : Exemple dun capteur analogique
La souris fournit un ordinateur un signal
logique priodique, sous forme dimpulsions, qui
lui permettent de compter ces impulsions pour
en dduire les cordonnes X et Y de la souris
sous forme de nombres N
X
et N
Y
.
Fig. 4 : Exemple de capteur numrique
Fonct i on - Acquri r
62
3. CARATERISTIQUES DUN CAPTEUR :
Certains paramtres sont communs tous les capteurs. Il caractrisent les contraintes de mise en
uvre et permettent le choix dun capteur :
- L'tendue de la mesure : c'est la diffrence entre le plus petit signal dtect et le plus grand
perceptible sans risque de destruction pour le capteur.
- La sensibilit : ce paramtre caractrise la capacit du capteur dtecter la plus petite variation
de la grandeur mesurer. Cest le rapport entre la variation AV du signal
lectrique de sortie pour une variation donne A+ de la grandeur physique
dentre : S = AV / A+
- La fidlit : Un capteur est dit fidle si le signal quil dlivre en sortie ne varie pas dans le temps
pour une srie de mesures concernant la mme valeur de la grandeur physique +
dentre. Il caractrise lInfluence du vieillissement.
- Le temps de rponse : c'est le temps de raction d'un capteur entre la variation de la grandeur
physique qu'il mesure et l'instant o l'information est prise en compte par
la partie commande.
4. CAPTEURS LOGIQUES (Tout Ou Rien : TOR) :
Les capteurs TOR fournissent une information logique, gnralement sous forme d'un contact
lectrique qui se ferme ou s'ouvre suivant l'tat du capteur.
4.1- Capteurs avec contact :
Ce type de capteur est constitu d'un contact lectrique qui s'ouvre ou se ferme lorsque l'objet
dtecter actionne par contact un lment mobile du capteur (dispositif d'attaque). les gammes de ce
type de capteur sont trs varies ; elles sont fonction des problmes poss par leur utilisation.
Ainsi, la tte de commande et le dispositif d'attaque sont dtermins partir de :
- La forme de l'objet : came 30, face plane ou forme quelconque ;
- La trajectoire de l'objet : frontale, latrale ou multidirectionnelle ;
- La prcision de guidage.
Les figures suivantes montre des exemples de capteur de position :
Caractristiques :
- Trajectoire rectiligne de l'objet dtecter
- Guidage prcis < 1mm
- Came 30
Fig. 6 : Capteur rectiligne poussoir galet thermoplastique
Fig. 5 : Capteur rectiligne poussoir
Caractristiques :
- Commande directe
- Prsence de l'objet en but mcanique
Chapi t re 1 - Les capteurs
63
4.2- Capteurs sans contact :
Les capteurs sans contact ou de proximit dtectent distance et sans contact avec lobjet dont ils
contrlent la position. Un contact lectrique s'ouvre alors ou se ferme en fonction de la prsence ou de
la non prsence dun objet dans la zone sensible du capteur.
A l'inverse des capteurs avec contacts, les capteurs de proximit sont des dtecteurs statiques (pas
de pice mobile) dont la dure de vie est indpendante du nombre de manuvres. Ils ont aussi une
trs bonne tenue l'environnement industriel (atmosphre polluante).
Le choix dun dtecteur de proximit dpend :
- de la nature du matriau constituant lobjet dtecter,
- de la distance de lobjet dtecter,
- des dimensions de lemplacement disponible pour implanter le dtecteur.
4.2.1- Capteurs inductifs :
La technologie des dtecteurs de proximit inductifs est base sur la variation dun champ
magntique lapproche dun objet conducteur du courant lectrique. Leur usage est uniquement
rserv la dtection dlments mtalliques dans les secteurs de la machine-outil, l'agro-
alimentaire, la robotique, et les applications de l'usinage, la manutention, l'assemblage, le
convoyage.
Fig. 7 : Capteur angulaire levier galet
Caractristiques :
- Guidage peu prcis ~ 5mm
- Came 30
Fig. 8 : Capteur tige souple ressort
Caractristiques :
- Cible de forme quelconque
- Trajectoire multidirectionnelle
- Guidage > 10 mm
Caractristiques :
- Porte nominale qui dfinit la zone de
dtection. Elle dpend de l'paisseur de l'objet
et peut aller jusqu' 50mm.
- Tension d'alimentation de 12V 48V continu
et de 24 240V alternatif.
- Technique de raccordement 2 fils et 3 fils.
Fig. 9 : Dtecteur de proximit inductif
Fonct i on - Acquri r
64
Les dtecteurs inductifs existent suivant diffrents modles ; ceci en fonction de leur mode de
raccordement comme cest illustr la figure 10 :
- 2 fils avec courant continu ou alternatif ;
- 3 fils avec courant continu type PNP ou NPN, en fonction de llectronique interne.
4.2.2- Capteurs capacitifs :
La technologie des dtecteurs de proximit capacitifs est base sur la variation dun champ
lectrique lapproche dun objet quelconque. Ils permettent de dtecter tout type d'objet dans
les domaines de l'agro-alimentaire, de la chimie, de la transformation des matires plastiques, du
bois et des matriaux de construction.
4.2.3- Capteurs magntiques :
Un interrupteur lame souple (I.L.S.) est constitu d'un botier l'intrieur duquel est plac un
contact lectrique mtallique souple sensible aux champs magntiques. Il permet de dtecter tous
les matriaux magntiques dans le domaine de la domotique pour la dtection de fermeture de
portes et fentres et le domaine pneumatique pour la dtection de la position d'un vrin, etc.
4.3- Capteurs Photolectriques distance :
Les cellules photolectriques permettent de dtecter sans contact tous les matriaux opaques (non
transparents), conducteurs dlectricit ou non. Ce type de capteurs se compose essentiellement d'un
metteur de lumire associ un rcepteur photosensible. La figure 13 montre une illustration de
quelques capteurs photolectriques :
Caractristiques :
- Porte nominale qui dfinit la zone de dtection. Elle
dpend de l'paisseur de l'objet et peut aller jusqu' 50mm.
- Tension d'alimentation de 12V 48V continu et de 24
240V alternatif.
- Technique de raccordement 2 fils et 3 fils.
Fig. 11 : Dtecteur de proximit capacitif
~
~
BN
BU
BN
BU
BK
PNP
+
BN
BU
BK
NPN
+
2 fils AC/DC 3 fils type PNP 3 fils type NPN
Fig. 10 : Technique de raccordement des capteurs inductifs et capacitifs
Prsence dun champ magntique :
Contact ferm
Absence de champ magntique :
Contact ouvert
Aimant
Permanent
Fig. 12 : Principe de fonctionnement dun ILS
Chapi t re 1 - Les capteurs
65
Ces dtecteurs sont utiliss dans les domaines industriels et tertiaires les plus divers comme :
- La dtection d'objets et de produits dans la manutention et le convoyage ;
- La dtection de pices machine dans les secteurs de la robotique et du btiment ;
- La dtection de personnes, de vhicules ou d'animaux, etc.
Pour raliser la dtection d'objets dans les diffrentes applications, 3 techniques de montages sont
possibles:
- Systme barrage (figure 14) caractris par :
L'metteur et le rcepteur sont situs dans deux botiers spars ;
La porte la plus longue pour ce type de capteur (jusqu 30 m) ;
Le faisceau est mis en infrarouge ;
La dtection des objets opaques ou rflchissant quelque soit le matriau ;
Lalignement entre metteur et rcepteur doit tre ralis avec soin.
- Systme reflex (figure 15) caractris par :
L'metteur et le rcepteur sont situs dans le mme botier ;
Utilisation d'un rflecteur qui renvoie le faisceau lumineux en cas d'absence de cible ;
La porte peut atteindre jusqu 15 m ;
Le faisceau est mis en infrarouge ;
La dtection des objets opaques et non rflchissant quelque soit le matriau ;
- Systme proximit (figure 16) caractris par :
L'metteur et le rcepteur sont situs dans le mme botier ;
La prsence de la cible renvoie le faisceau lumineux vers le capteur ;
La porte dpend de la couleur de la cible, de son pouvoir rflchissant et de ses
dimensions. Elle augmente si l'objet est de couleur claire ou de grande dimension.
Fig. 13 : Exemple de capteurs photolectriques
Emetteur Recepteur
Cible
Fig. 14 : Montage type " Barrage "
Emetteur
Rcepteur
Cible
Rflecteur
Fig. 15 : Montage type " Reflex "
Emetteur
Rcepteur Cible
Fig. 16 : Montage type " Proximit "
Rflecteur
Fonct i on - Acquri r
66
5. CAPTEURS NUMERIQUES :
5.1- Codeur optique incrmental :
Un disque rotatif comporte au maximum 3 pistes. La piste priphrique A du disque est divise en
"n" fentes rgulirement rparties. Ainsi, pour un tour complet de l'axe du codeur, le faisceau lumineux
est interrompu n fois et dlivre la sortie de la cellule photosensible "n" signaux carrs. La figure 18
dcrit un capteur incrmental :
Pour connatre le sens de rotation du codeur, on utilise une deuxime piste B qui sera dcale par
rapport la premire de 90 (1/4 de tour).
5.2- Codeur optique absolu :
Les codeurs absolus sont destins des applications de contrle de dplacement et de
positionnement dun mobile par codage. Le disque du codeur comporte plusieurs pistes (jusqu
20). Chaque piste est alternativement opaque et transparente et possde son propre systme de
lecture (diode mettrice et diode rceptrice).
A chaque position angulaire de l'axe du codeur correspond un nombre binaire cod en GRAY Dans ce
code, il n'y a qu'un seul bit qui change chaque fois pour viter les alas de fonctionnement. Avant
toute utilisation, le mot fourni par le codeur doit donc tre transcod en binaire, car l'unit de
traitement travaille en binaire pur.
A titre pdagogique, voyons la figure 19 les
diffrentes combinaisons d'un codeur optique absolu
binaire sur 3 bits:
Cellules
Photosensibles
Disque
optique
LED
Arbre
Unit de
Traitement
Fig. 18 : Codeur optique incrmental
Fig. 19 : Codeur optique absolu binaire 3 bits
Chapi t re 1 - Les capteurs
67
E X E R C I C E R E S O L U
Le montage ci-contre permet de protger un moteur courant continu,
fonctionnant avec 2 sens. La protection est contre les positions limites o
le moteur peut tre cal ; dans ce cas le couple augmente, ainsi le
courant dans le moteur, ce qui peut dtriorer le moteur. C'est le cas du
moteur du position d'antenne parabolique. La tension E est soit positive,
soit ngative, suivant la commande qui n'est pas reprsente ici, ainsi que
le systme came qui permet d'actionner les "fins de course" (fcw et fce).
Analyser le fonctionnement d'un tel montage. Les fins de course sont
ferms au repos.
CORRIGE :
Au repos, on suppose le moteur dans une position o ni fcw ni fce n'est actionn.
Quand le moteur tourne vers "West" et arrive la position limite "West" fcw s'ouvre et le
moteur s'arrte. Pour tourner vers "East", Il faut alors inverser le sens.
En inversant le sens, la diode DW joue le rle fcw pour un court instant, aprs quoi fcw
se ferme (voir figure ci -dessous gauche).
En tournant vers "East" et arrivant la position limite "East", fce s'ouvre et le moteur
s'arrte. Pour tourner vers "West", Il faut alors inverser le sens.
Et ainsi de suite (voir figure ci-dessous droite).
E X E R C I C E S N O N R E S O L U S
Les asservissements numriques, sont abondants dans le domaine industriel. On s'intresse dans cette
tude l'asservissement de postion. La structure du systme est donne la figure ci-dessous. Sa
description est comme suit :
- Un curseur se dplace linairement grce un systme vis-crou ;
- Le systme vis-crou est entran en rotation par un moteur courant continu ;
- La position du curseur est capte par un codeur incrmental solidaire laxe du moteur ;
- La commande permet de comparer la position capte et la position de consigne ; si les 2
positions sont gales, on arrte le moteur.
Unit de
commande
fcg
fcd
fcg : capteur de fin de course gauche
fcd : capteur de fin de course droite
Commande
Vis-crou
Curseur
Position
Moteur
C.C.
160 140 120 100 0 20 40 60 80
Codeur
incrmental
Consigne
E
M
fcw
fce
DW DE
DW DE
E
M
fcw
fce
E
M
fcw
fce
DW
DE
Fonct i on - Acquri r
68
1- ETUDE DU CODEUR INCREMENTAL :
Comme le montre la figure ci-contre, la
capture de la position se fait l'aide d'un
codeur incrmental constitu de :
- Un disque contenant deux pistes A et B
dcales et divises chacune, en 16 secteurs
quidistants et alternativement opaques et
transparents ;
- Deux lments optolectroniques (une diode
infrarouge et une photodiode) disposs de
part et dautre de chaque piste.
1.1- Calculer la sensibilit de ce capteur et
prciser son unit.
1.2- Calculer le dplacement minimal du curseur
dtect par ce capteur sachant que le pas
de la vis est de 5 mm.
1.3- Quel est le rle:
a/ Du circuit RC ?
b/ De la porte inverseuse de type "Trigger" ?
1.4- La photodiode est caractrise par un courant I
D
= 100 A en clairage et un courant I
D
= 100 nA
en obscurit. Sachant que V
IH
min = 3,5 V et V
IL
max = 1.5 V pour une porte CMOS avec
Vcc = 5 V, vrifier le bon choix de R
2
.
1.5- On suppose que le disque a subi une rotation d'un
demi-tour dans un sens et d'un demi-tour dans le sens
contraire, une vitesse constante. Complter les
chronogrammes des signaux EncA et EncB
correspondants ce mouvement sachant qu'ils
dbutent comme le montre la figure ci-contre.
1.6- Le principe de la dtermination de la position du
curseur consiste, en l'accumulation des impulsions
fournies par une piste, l'aide d'un
compteur/dcompteur selon le montage de la figure
ci-contre. Le compteur est incrment ou
dcrment suivant le sens de rotation donn par
l'tat du signal EncB chaque transition positive du
signal EncA.
a/ Que reprsente alors le signal Q ?
b/ Combien de tours fera le disque, pour que le curseur parcourra la course maximale de la vis,
qui est de 160 mm ?
c/ En dduire le nombre de bits ncessaire pour reprsenter la position.
1.7- Proposer un montage pour l'unit de traitement de ce systme sachant qu'on peut utiliser un des
signaux (EncA , EncB) comme signal d'horloge et l'autre comme signal (Comptage/dcomptage).
EncA
EncB
Compteur/Dcompteur
D Q
EncB
EncA
Up/Down
Ck
Ck
N
(Position)
photodiode
4093
C
R
5V
R2
Diode
infrarouge
5V
R1
EncA
photodiode
4093
C
R
5V
R2
39KO
Diode
infrarouge
5V
R1
EncB
Codeur incrmental
22.5 22.5
2
2
.
5
2
2
.
5
22.5 22.5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.5
2
2
.5
2
2
.
5
2
2
.
5 2
2
.5
2
2
.5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
2
2
.
5
Piste B
Emetteurs
Rcepteurs
Piste A
Disque
Pas
Chapi t re 2 - Condi t i onnement de si gnal
69
CHAPITRE 2
CONDITIONNEMENT DU SIGNAL
1. INTRODUCTION :
Gnralement, un capteur fournit un signal lectrique qui peut se mettre sous diffrentes formes
(tension, courant, etc.) et qui nest pas directement exploitable.
Le conditionnement du signal consiste transformer et adapter le signal de dpart afin de lui donner la
forme la plus approprie pour son traitement. Plusieurs fonctions contribuent cette fin comme c'est
indiqu dans la figure 1 :
- Lamplification consiste modifier l'amplitude du signal sans changer sa forme ni sa nature ;
- Le filtrage consiste en une structure adapte et calcule, qui laissera passer certains signaux et
pas d'autres.
- La mise en forme ou la conversion consiste en une modification de la nature du signal. Par
exemple, cela peut tre une transformation :
d'un courant en une tension et inversement ;
dun signal analogique en un signal logique ou numrique.
Dans ce qui suit, on se limitera ltude des fonctions "Amplification" et "Mise forme".
2. L'AMPLIFICATION A BASE D'UN AMPLIFICATEUR OPERATIONNEL
L'amplification se rsume par une simple multiplication du signal d'entre par un coefficient K comme
le montre la figure 2. L'amplification se justifie dans les cas o le signal est trs faible. Par exemple, un
capteur fournit quelques millivolts, alors que l'on a besoin de plusieurs volts.
Fig. 2 : La fonction d'amplification
K
Amplification Filtrage
Mise en forme
ou
Conversion
Unit de
traitement
Signal
traiter
Fig. 1 : Les fonctions de base d'une chane d'acquisition
Fonct i on - Acquri r
70
2.1- Amplificateur Oprationnel (AOP) :
L'amplificateur oprationnel (figure 3) est un composant intgr constitu d'un assemblage de
transistors et de rsistances. Il est caractris par :
- Deux bornes d'alimentation +V et V ;
- Deux entres e+ et e- ;
- Une tension diffrentielle de ses entres : = e+ - e- ;
- Une sortie Vs.
L'AOP est caractris par une amplification diffrentielle Ad trs grande (10
5
ou plus). L'examen de
sa caractristique de transfert donne la figure 4 fait apparatre deux modes de fonctionnements :
- Rgime linaire d'amplification o Vs = Ad . ;
- Rgime non linaire de saturation o Vs peut prendre deux valeurs :
Vs = +V si > 0 et donc e+ > e- ;
Vs = -V si < 0 et donc e+ < e-.
Dans ce qui suit, on va travailler dans le rgime linaire spcifique l'amplification et en
considrant l'AOP idal c'est--dire la valeur de l'amplification Ad est considre comme infinie. Les
consquences pratiques de l'AOP idale seront les suivantes :
- Ad : ainsi = Vs/Ad ~ 0 et donc e+ = e- ;
- Rsistance d' entre : ainsi i+ = i- = 0
2.2- Montage amplificateur base d'AOP :
2.2.1. Amplificateur inverseur :
Le montage de la figure 5 reprsente un amplificateur de tension non inverseur base d'AOP, la
rsistance R2 effectuant une raction ngative. En considrant l'AOP idal on peut dmontrer la
relation entre la sortie Vs et l'entre Ve :
Hypotheses :
i+ = i- = 0
e+ = e-
R1 et R2 sont en srie donc on peut appliquer le
pont diviseur de tension :
2 R 1 R
1 R
. Vs e
+
=
et : Ve e =
+
Donc :
1 R
2 R
1
Ve
Vs
Av + = =
Fig. 3 : Schma d'un AOP
+
-
+V
-V
Vs
e-
e+
i+
i-
-V
+V
Vs
Zone linaire
Zone non linaire
Zone non linaire
Fig. 4 : Caractristique de transfert d'un AOP
+
-
R2
R1
Vs
Ve
+V
-V
Fig. 5 : Amplificateur non inverseur
Chapi t re 2 - Condi t i onnement de si gnal
71
2.2.2. Suiveur :
Le montage de la figure 6 reprsente un montage suiveur qui peut tre utilis comme adaptateur
dimpdance. En considrant l'AOP idal on dmontre la relation entre la sortie Vs et l'entre Ve :
Hypothses :
e+ = e-
On a :
. Vs e =
et : Ve e =
+
Donc :
1 = = =
Ve
Vs
Av Ve Vs
2.2.3. Amplificateur sommateur :
Le montage de la figure 7 reprsente un amplificateur sommateur inverseur base d'AOP, la
rsistance R2 effectuant une raction ngative. En considrant l'AOP idal on peut dmontrer la
relation entre la sortie Vs et l'entre Ve :
Hypothses :
i+ = i- = 0
e+ = e-
On peut appliquer le thorme de Millman pour
dterminer le potentiel de e
-
:
( )
1 2 . 2
. 1 2 1 . 2
2
1
1
1
1
1
2 1
2
1
1
R R
Vs R V V R
R R R
R
Vs
R
V
R
V
e
+
+ +
=
+ +
+ +
=
0 =
+
e
Donc :
( ) 2 1 .
1
2
V V
R
R
Vs + =
2. MISE EN FORME PAR COMPARATEUR UN SEUIL :
Cette fonction correspond une conversion d'un signal analogique en un signal logique comme le
montre la figure 6. En effet, le comparateur un seuil consiste comparer le signal analogique d'entre
par rapport un seuil de rfrence :
- Si ce seuil est atteint, alors la sortie du comparateur est un niveau logique ;
- Si ce seuil n'est pas atteint, alors la sortie du comparateur est l'autre niveau logique.
Comparateur
Fig. 6 : La fonction de mise en forme
+
-
Vs
Ve
+V
-V
Fig. 6 : Montage suiveur
+
-
R1 R2
Vs
V1
R1
V2
Fig. 7 : Amplificateur sommateur inverseur
Fonct i on - Acquri r
72
Le montage de la figure 7 reprsente un comparateur un seuil base d'AOP. L'AOP fonctionne en
rgime non linaire. Les calculs suivants dterminent le seuil de basculement de ce comparateur ainsi que
le mode de fonctionnement :
Vref e et Ve e = =
+
Comme lAOP fonctionne en rgime non linaire, il y a deux cas envisager :
Si Ve > Vref alors : Vs = +V
Si Ve < Vref alors : Vs = -V
La caractristique de transfert donne la figure 8 rsume le fonctionnement du comparateur un
seuil :
E X E R C I C E S R E S O L U S
EXERCICE N1 :
Le schma ci-contre reprsente un amplificateur
gain variable destin pour les capteurs :
Dmontrer que :
1
1
. Ve Vs
+ o
o
=
EXERCICE N2 :
On dsire amplifier et adapter la tension Ve
fournie par un capteur de temprature. Pour
cela, on utilise le montage amplificateur
diffrentiateur suivant :
+
-
Vs
Ve
+V
-V
Vref
Fig. 7 : Comparateur AOP
Vs
Ve
Vref
+V
Fig. 8 : Caractristique de transfert
AOP est considr idal
Vref = 2.73V
V = 12V
T(C) = T(K) 273K
+
-
R1
R2
R2
Vs
Ve
+V
-V
R1
Vref
+
-
R
R
Vs
Ve
+V
-V
R
o.R
Chapi t re 2 - Condi t i onnement de si gnal
73
2.1. Exprimez la tension Vs en fonction de R1, R2, Vref et Ve ?
2.2. Sachant que le capteur de temprature fournit une tension de 10mV pour 1K, calculer le rapport
R2/R1 pour qu' la sortie de l'amplificateur, Vs = 20mV pour 1C ?
2.3. Pourquoi utilise-ton un diffrentiateur et pourquoi Vref = 2.73V ?
CORRIGES :
EXERCICE N1 :
( )
( ) Millman de thorme
2
Ve Vs
R
1
R
1
R
Ve
R
Vs
e
tension de diviseur pont
1
. Ve
R R .
R .
. Ve e
+
=
+
+
=
+ o
o
=
+ o
o
=
+
1
1
. Ve Vs e e Or
+ o
o
= =
+
EXERCICE N2 :
2.1. ( ) tension de diviseur pont
2 R 1 R
2 R
. Ve e
+
=
+
( )
=
+
+
=
+
e e Or Millman thorme
2 R 1 R
2 R . Vref 1 R . Vs
e
( ) Vref Ve .
1 R
2 R
Vs =
2.2. T = 1C = 274K
( )
trois de rgle V 74 , 2
K 1
K 274
. mV 10 Ve =
=
Puisqu'on dsire Vs = 20mV pour T= 1C 2
Vref Ve
Vs
1 R
2 R
=
=
2.3. Pour raliser la formule T(C) = T(K) 273K. 2.73V 273K.
E X E R C I C E N O N R E S O L U
Le montage ci-dessous reprsente un amplificateur diffrentiel utilis dan les instruments de mesure,
pour les faibles tensions continues issues d'un capteur :(amplificateur d'instrumentation):
4.1. Sachant que les 3 AOP sont idaux, Exprimer la tension V1 en fonction de V2, R1, R2 et R3 ?
4.2. En dduire la tension V2 en fonction de l'entre Ve ?
4.3. Exprimer la tension Vs en fonction de V
A
, V
B
, R4 et R5 ?
4.4. Dduire l'expression de Vs en fonction de V2, puis de vs en fonction de Ve ?
R1
R2
R3
R4
R4
R5
R5
-
-
-
+
+
+
Vs
Ve
V1 V2
Fonct i on - Acquri r
74
CHAPITRE 3
INTERFACE EN ENTREE
INTRODUCTION :
Dans un systme automatis, l'unit de traitement reoit les informations traites principalement de :
- L'utilisateur, grce aux organes de dialogue en entre tel un bouton d'arrt d'urgence ; il
s'agit de l'interface Homme/Machine (IHM) ;
- Des capteurs tel un "fin de course" ; il s'agit d'interface centr principalement sur l'isolation
lectrique ou galvanique et la mise en forme du signal
1. INTERFACE HOMME/MACHINE (IHM) :
Linterface Homme/Machine en entre est une fonction de communication indispensable pour bien
grer un systme automatis. Il consiste transmettre au systme automatis les ordres de
l'oprateur quon dsigne par "consignes". Le dialogue Homme/Machine se fait par lutilisation de
constituants regroups dans ce qu'on appelle pupitre de commande.
1.1. Les boutons poussoirs :
Les boutons poussoirs constituent l'interface de dialogue privilgie lorsque les informations
transfres vers le systme sont peu nombreuses et limites des signaux Tout Ou Rien (TOR). Parmi
les boutons poussoirs utiliss, on distingue :
- Les boutons " coup de poing " accrochage pour les arrts d'urgence ;
- Les boutons poussoirs affleurants ;
- Les boutons tournants manette ;
- Les boutons tournants cl.
1.2. Les claviers :
Les claviers de saisie permettent l'introduction d'informations
alphanumriques et la modification de donnes et paramtres
comme le nombre de pices fabriquer ou les coordonnes d'une
pice usiner, etc.
1.3. Les terminaux d'exploitation :
Un terminal dexploitation est un constituant de dialogue permettant les premires mises en uvre
du systme automatis. Il est li temporairement la partie commande (automate programmable)
pour introduire des codes et des paramtres dcrivant le processus tudi.
Bouton
Coup de poing
Bouton
Affleurant
Bouton
Tournant manette
Bouton
Tournant cl
Fig 2. Exemples de boutons poussoirs
Fig 3. Exemple de clavier
Chapi t re 3 - I nterface en entre
75
2. ISOLATION GALVANIQUE :
2.1. Principe et rle :
L'unit de traitement travaille typiquement avec une tension de 5V DC, ncessaire pour alimenter
principalement les circuits intgrs logiques. Alors qu'un capteur tel un "fin de course" fournit
typiquement une tension de 24 V DC. Pour protger l'unit de traitement contre une ventuelle liaison
directe avec tension relativement dangereuse pour elle, il faut une isolation lectrique ou galvanique,
ainsi qu'un filtrage et mise en forme du signal. Le principe est rsum par le schma fonctionnel
suivant :
2.2. Exemple de schma :
2.2.1- Principe :
Le schma le plus classique dans ce domaine est
base d'un optocopleur, ce qui donne le schma de
base suivant ; un tel montage, on le trouve dj
intgr dans un API :
- Le trait d'axe rouge sert uniquement
marquer l'isolation entre les 2 milieux ;
- Quand le capteur est actionn, son contact
est ferm, il fournit du 24 V au circuit de la
diode infrarouge de l'optocoupleur :
La diode de l'optocoupleur conduit et met de l'infrarouge ;
Le transistor de l'optocoupleur , travaillant en commutation se sature ;
La porte inverseuse Trigger reoit un 0 logique et fournit sa sortie T un 1.
- Quand le capteur est non actionn, alors :
La diode de l'optocoupleur est bloque et
n'met pas d'infrarouge ;
Le transistor de l'optocoupleur se bloque ;
La porte inverseuse Trigger reoit un 1
logique et fournit sa sortie T un 0.
- L'tat de la porte reflte l'tat du capteur ;
- Le bruit affectant le signal du capteur, cause
des parasites industrielles, est filtr par le
circuit RC ;
- La porte Trigger met en forme le signal et
envoie l'unit de traitement un signal
"propre", et donc bien compatible.
Capteur,
Bouton, etc.
Filtrage
Isolation
galvanique
Mise en
forme
Unit de
traitement
t
C
0
24V
t
Q
0
5V
t
F T
0
5V
Optocopleur
R1
R2
Masse 5V
Masse 24V
R3
C
5V
Vers unit
de traitement
Optocoupleur
Q F T
Capteur
24V
C
Fonct i on - Acquri r
76
E X E R C I C E S R E S O L U S
EXERCICE N1:
Proposer un montage permettant :
d'acqurir l'tat d'un bouton d'arrt d'urgence ;
de signaliser l'tat par un LED.
EXERCICE N2:
Le montage ci-contre est une variante du
montage de base, vu dans le cours. On
reprsente uniquement la partie isolation.
2.1- Rappeler le rle de l'isolation.
2.2- Quel es le rle de DZ1 et quelle doit-
tre typiquement sa valeur ?
CORRIGES :
EXERCICE N1 :
De point de vue aspect physique, le
bouton d'arrt d'urgence est pris
comme un capteur par l'unit de
traitement.
EXERCICE N2:
2.1- Lisolation galvanique, donc la protection des biens et des personnes.
2.2- Ecrte la tension en cas d'une tension plus grande que 24 V. Sa valeur doit tre
typiquement de 24V.
R2
Arrt
d'urgence
R1
R3
24V
LED
Masse 5V
DC
Masse 24V
DC
R4
C
5V
Unit de
traitement
77
UNITE ATC
FONCTION
T R A I T E R
Dans un systme automatis, le traitement des informations concernant principalement
l'tat de la PO (capteurs, consignes utilisateur, etc.) ncessitent des organes de commande
dote d'une certaine intelligence relativement leve, allant du simple circuit logique
combinatoire jusqu'au microordinateur sophistiqu.
La position de la fonction "Traiter" dans une chane d'information, ainsi que les
diffrentes ralisations principales sont reprsentes par la figure suivante.
PRESENTATION
AQUERIR
Grandeurs
Consignes
physiques
,
Images
Informationnelles
utilisables
Ordres
Messages
Modules logiques
Automates programmables
Ordinateurs
Microcontrleur
Circuits logiques programmables
COMMUNIQUER
TRAITER
COMPETENCES ATTENDUES
A partir de tout ou partie dun produit support avec son cahier des charges et son dossier
technique :
Exprimer les entres/sorties dune unit de traitement des donnes acquises
Mettre en uvre une unit de traitement de linformation
CHAPITRES INCLUS DANS LA FONCTION TRAITER
Reprsentation et codage de linformation binaire
Fonctions combinatoires de bases
Simplification des fonctions logiques
Fonctions combinatoires avances
Fonctions squentielles
Familles logiques TTL et CMOS
Circuits intgrs de temporisation
Circuits logiques programmables
GRAFCET
Les systmes programmables : Automate programmable industriel
Fonct i on - Trai ter
78
CHAPITRE 1
REPRESENTATION ET CODAGE DE L'INFORMATION BINAIRE
INTRODUCTION :
La numration arabe est universellement adopte, tant donn sa capacit faire les calculs. Il s'agit
du systme de numration avec la base 10. Comme on le sait, dans cette base familire :
- On utilise les 10 symboles, appels chiffres, de l'ensemble : {0, 1, 2, 3, 4, 5, 6, 7, 8, 9} ;
- Un nombre quelconque peut s'crire en utilisant les puissances de 10 ;
Exemple : 571 = 5 x 102 + 7 x 101 + 1 x 100 .
Mais la reprsentation des nombres avec le systme dcimal (base 10) n'est pas la seule utilise. On
peut donc en utiliser d'autres, en particulier le systme binaire (base 2). Les circuits logiques ne
connaissent que les valeurs 0 et 1 ; alors on peut faire des calculs et des traitements comme on le fait
avec le systme dcimal. Ceci permet de rendre le traitement de l'information automatique et rapide.
1. LES SYSTEMES DE NUMERATION :
1.1. Principe :
D'une faon gnrale, soit une base B, donc associe B symboles : { S
0
, S
1
, , S
B-1
} ; un nombre N, a
les caractristiques suivantes :
- Il s'crit N = A
n-1
A
i
A
1
A
0
avec A
i
e { S
0
, S
1
, , S
B-1
} ;
- Il a pour valeur N = A
n-1
.B
n-1
+ + A
i
B
i
+ + A
1
B
1
+ A
0
B
0
(forme polymoniale) ;
- Ai est le chiffre (digit) de rang i et de poids Bi ;
- An est le chiffre le plus significatif (MSD : Most Significant Digit) ;
- A0 est le chiffre le moins significatif (LSD : Less Significant Digit).
On va tudier les bases 2 et 16 pour leur intrt dans les circuits logiques. La rfrence la base 10
est d'un usage pratique, on tudiera alors la conversion de la base 2 vers la base 10 et vise versa.
1.2. Systme binaire (base 2) :
L'homme connat la base 10 ; il fait alors ses calculs dans cette base. Alors, puisque les systmes
numriques ne reconnaissent que 2 tats 0 ou 1, ils seront trs aptes de faire les calculs dans la base
2. La base 2 a les caractristiques suivantes :
- Un nombre N s'crit : N = A
n
A
n-1
A
i
A
1
A
0
avec Ai e {0, 1} ; chaque chiffre est appel
couramment bit, contraction de binary digit (chiffre binaire) ; Ce nombre N est couramment
dsign aussi par "Mot de n bits" ;
- A
n
est le chiffre le plus significatif, couramment appel MSB (Most Significant Bit) ;
- A
0
est le chiffre le moins significatif, couramment appel LSB (Less Significant Bit).
- Ce nombre a pour valeur N = A
n-1
2
n-1
+ + A
i
2
i
+ + A
1
2
1
+ A
0
2
0
(forme polymoniale);
Exemple : N = 110101 ; il a pour valeur N = 1x2
5
+ 1x2
4
+ 0x2
3
+ 1x2
2
+ 0x2
1
+ 1x2
0
.
1.3. Conversion de la base 2 vers la base 10 :
On exploite directement la forme polynomiale.
Exemple pour la base 2 : (1011)
2
= 1x2
3
+ 0x2
2
+1x2
1
+ 1x2
0
= 8 + 0 + 2 + 1 = 8 + 4 + 2 = (11)
10
.
Chapi t re 1 - Reprsent ati on et codage de l i nf ormat i on bi nai re
79
1.4. Conversion de la base 10 vers la base 2 :
La mthode de division est la plus utilise ; elle consiste en des
divisions successives du nombre (N)
10
par 2, jusqu' obtenir un
quotient nul. Les restes des divisions successives, crits dans l'ordre
inverse, constituent le nombre N dans la base 2 (N)
2
.
Exemple : (22)
10
= (?)
2
.
2. CODAGE DE L'INFORMATION BINAIRE :
Un systme lectronique traite les informations en binaire. Or, ces informations traiter sont de
diffrentes natures. Par exemple, en traitement de texte, on manipule des caractres ; pour qu'un
ordinateur traite ces caractres, il faut associer alors chaque caractre un nombre binaire. Cette
association s'appelle "Codage" de l'information binaire et permet d'utiliser plusieurs codes suivant le
domaine d'application. L'opration inverse s'appelle "Dcodage" ou "Transcodage". On tudie en
particulier : Le code binaire pur, le code GRAY, le code BCD et le code ASCII.
2.1. Le code binaire pur :
Il est aussi appel code binaire naturel. C'est le code binaire sans aucune codification, c'est dire
qui dcoule directement du principe gnral de la numration. C'est le code naturel utilis dans les
systmes numriques (ordinateur, etc.). Le tableau suivant donne le code binaire pur pour un exemple
d'un mot de 4 bits (A
3
A
2
A
1
A
0
) :
Code binaire
Valeur dcimale
A
3
A
2
A
1
A
0
0 0 0 0 0
1 0 0 0 1
2 0 0 1 0
3 0 0 1 1
4 0 1 0 0
5 0 1 0 1
6 0 1 1 0
7 0 1 1 1
8 1 0 0 0
9 1 0 0 1
10 1 0 1 0
11 1 0 1 1
12 1 1 0 0
13 1 1 0 1
14 1 1 1 0
15 1 1 1 1
2.2. Le code GRAY :
Dans les systmes industriels o on a besoin de mesurer un dplacement linaire ou angulaire, on
utilise le "code GRAY". La raison de ce choix est que si le systme qui mesure le dplacement (capteur)
utilise le code binaire pur, le dplacement d'une position une autre voisine gnre des combinaisons
intermdiaire fausses, car plusieurs bits varient en mme temps.
Pour remdier ce problme, il suffit de coder chaque position de faon que les valeurs de
positions successives ne diffrent que d'un seul bit. C'est pour cela qu'on l'appelle "code distance
unit". On l'appelle aussi "code binaire rflchi" parce que pour le construire, on procde par rflexion
comme l'indique le tableau suivant avec 4 bits :
- on a 16 combinaisons diffrentes ;
- dans le passage d'une combinaison une autre, il n'y a qu'un bit qui change.
(22)
10
= (10110)
2
22
2
0 11
2
1 5
2
1 2
2
0 1
2
1 0
LSB
MSB
Pour remplir rapidement une table de vrit
avec toutes les combinaisons possibles des
variables d'entre, on procde comme en
dcimal :
- On part du poids faible (A
0
), qui
balaye la plage 0 1 ;
- On passe au poids suivant (A
1
),
qui reste 0 pour la plage 0 1 de
A
0
, puis 1 pour la mme plage ;
- Et ainsi de suite.
A
2
A
1
A
0
0 0 0
0 0 1
0 1 0
0 1 1
Fonct i on - Trai ter
80
Code BCD
Valeur dcimale
A
3
A
2
A
1
A
0
0 0 0 0 0
1 0 0 0 1
2 0 0 1 0
3 0 0 1 1
4 0 1 0 0
5 0 1 0 1
6 0 1 1 0
7 0 1 1 1
8 1 0 0 0
9 1 0 0 1
Code binaire Code GRAY
Valeur dcimale
A
3
A
2
A
1
A
0
G
3
G
2
G
1
G
0
0 0 0 0 0 0 0 0 0
1 0 0 0 1 0 0 0 1
2 0 0 1 0 0 0 1 1
3 0 0 1 1 0 0 1 0
4 0 1 0 0 0 1 1 0
5 0 1 0 1 0 1 1 1
6 0 1 1 0 0 1 0 1
7 0 1 1 1 0 1 0 0
8 1 0 0 0 1 1 0 0
9 1 0 0 1 1 1 0 1
10 1 0 1 0 1 1 1 1
11 1 0 1 1 1 1 1 0
12 1 1 0 0 1 0 1 0
13 1 1 0 1 1 0 1 1
14 1 1 1 0 1 0 0 1
15 1 1 1 1 1 0 0 0
2.3. Le code ASCII :
Le code ASCII (American Standard Code
for Information Interchange) est un code
qui reprsente les caractres ditables ou
non ditables : ditables parce que l'on peut
les diter comme la caractre "A" et non
ditables comme le cratre "Escape" ou
"Return". Il est cod sur 7 bits (b6 b5 b4 b3
b2 b1 b0), ce qui permet de reprsenter
128 (2
7
) caractres diffrents. La table
suivante montre un tel codage. Par
exemple, Le code de la lettre "A"
(majuscule) est :
- en binaire : b6 b5 b4 b3 b2 b1 b0 = 1000001 ;
- en hexadcimal 41 ;
- en dcimal 65.
2.4. Le code BCD :
Le code BCD (Binary Coded Decimal) qui veut dire
Binaire Cod en Dcimal est la traduction en binaire des 9
premiers chiffres du systmes dcimal.
Si on a un nombre dcimal N m chiffres, il sera cod en BCD
sur (m x 4) bits : chaque chiffre dcimal est traduit en code BCD
sur 4 bits.
Exemple : (571)
2
= 1000111011 en binaire pur
= 0101 0111 0001 en BCD
0 0 0 0 0 0 0 0 0 0
1 0 1 0 0 1 0 0 0 1
1 1 0 1 1 0 0 1 1
1 0 0 1 0 0 0 1 0
1 1 0 0 1 1 0
1 1 1 0 1 1 1
1 0 1 0 1 0 1
1 0 0 0 1 0 0
1 1 0 0
1 1 0 1
1 1 1 1
Axes de sysmtrie (rflexion)
1 1 1 0
1 0 1 0
1 0 1 1
1 0 0 1
1 0 0 0
5
7 1
Chapi t re 1 - Reprsent ati on et codage de l i nf ormat i on bi nai re
81
3. NOTIONS D'ARITHMETIQUE BINAIRE :
Comme on l'a signal, avec les circuits logiques, on peut faire des calculs arithmtiques, puisqu'on a
les mmes rgles de calcul qui s'appliquent toutes les bases. On traite alors de l'arithmtique binaire et
on se limite aux cas de l'addition et de la soustraction.
3.1. Cas de l'addition et la soustraction :
Des circuits logiques simples ralisent ces oprations ; de plus une soustraction est facilement
ramene une addition grce une reprsentation adquate des nombres
3.2. Reprsentation des nombres :
Dans les calculs, on manipule des nombres positifs et ngatifs ; il faut alors coder le signe
algbrique. Plusieurs modes de reprsentation sont adopts en fonction des calculs effectuer et les
caractristiques technologiques des systmes de traitement.
3.2.1. Reprsentation par valeur absolue et signe :
Pour le bit de signe, on adopte la convention 0 (+) et 1 (-). Par exemple :
(+35)
10
= 0 100011 et (-35)
10
= 1 100011.
Cette solution a comme inconvnient la complexit de la ralisation technologique due :
- Un traitement spcifique du signe ;
- Une double reprsentation du 0.
3.2.2. Reprsentation par complment 2 :
Soit un nombre binaire A sur n bits et son complment (nomm aussi complment 1 de A), on a :
A + A = 2
n
1
On dduit de cette relation que : -A = + 1 - 2n.
Comme le (2n) ne rentre pas dans le format dfini (An-1 An-2 A1 A0), il sera ignor. On a alors
(-A = + 1) :
Le terme ( A + 1) s' identifie donc l'oppos arithmtique de A
Le terme ( + 1) est appel complment 2.
Retenue
0 + 0 = 0 0
0 + 1 = 1 0
1 + 0 = 1 0
1 + 1 = 0 1
111
11 1011
+ +
07 0111
18 10010
Retenue
0 - 0 = 0 0
0 - 1 = 1 1
1 - 0 = 1 0
1 - 1 = 0 0
19 11011
- -
05 00111
11
14 01110
A
n-1
A
n- 2
A
1
A
0
+
0 1 2 - n 1 - n A A A A .
1 1 1 1
(2
n
1)
A
A
A
A
Fonct i on - Trai ter
82
Exemple : Pour n = 4, on obtient :
(A)
10
A
A
( A +1)
(-A)
10
7 0111 1000 1001 -7
6 0110 1001 1010 -6
5 0101 1010 1011 -5
4 0100 1011 1100 -4
3 0011 1100 1101 -3
2 0010 1101 1110 -2
1 0001 1110 1111 -1
0 0000 1111 0000 0
E X E R C I C E S R E S O L U S
EXERCICE N 1 :
(40)
10
= ( ? )
2
EXERCICE N 2 :
Trouver le code ASCII du chiffre 9 et de la lettre "a".
EXERCICE N 3 :
Donner le complment 2 du nombre A = (13)
10
= (1101)
2
.
CORRIGE :
EXERCICE N1 :
EXERCICE N2 :
D'aprs la table du code ASCII prsent dans le cours, on trouve :
pour "9" : (47)10 = (0111001)2.
pour "a" : (97)
10
= (1100001)
2
. A noter qu'il est diffrent de "A" (majuscule).
EXERCICE N3 :
On a (13)
10
= (1101)
2
.
On fait le complment 1 du nombre A, soit A = 0010 ;
On ajoute 1 au rsultat, A + 1 = 0011.
On remarque que :
Le MSB reprsente le signe avec 0 (+) et 1 (-).
Le zro n'a qu'une seule reprsentation ;
Alors pour effectuer une soustraction, il suffit de faire une
addition avec le complment 2. Le rsultat se lit
directement en complment 2 :
Si le signe est + la lecture est directe ;
Si le signe est - , on convertit le rsultat en
recherchant le complment 2 de celui-ci.
(40)
10
=(101000)
2
=(28)
16
40
2
0 20
2
0 10
2
0 5 2
1 2
2
0 1
LSB
MSB
2
1 0
Chapi t re 2 - Fonct i ons combi nat oi res de base
83
CHAPITRE 2
FONCTIONS COMBINATOIRES DE BASE
INTRODUCTION :
De nombreux dispositifs ont deux tats stables de fonctionnement. Par exemple, un interrupteur peut
tre ouvert ou ferm ; un transistor, sous certaines conditions, peut tre bloqu ou satur, etc. On
convient daffecter, par convention, un des deux tats la valeur " 0 " et "1" lautre tat. Lalgbre de
Boole est loutil mathmatique pour tudier ces dispositifs et les circuits logiques reprsentent loutil
technologique pour raliser pratiquement les oprations de cette algbre. Les circuits qu'on va tudier
dans ce chapitre sont dits "combinatoires", car l'tat de leurs sorties ne dpend que de l'tat des entres.
1. OPERATIONS BOOLEENNES ELEMENTAIRES :
Trois oprations lmentaires suffisent pour dfinir une algbre de Boole :
- linversion : Non (Not) ;
- le produit logique : ET (AND) ;
- la somme logique : OU (OR).
1.1. Opration Inversion :
Cest une opration dfinie sur une seule variable. La sortie prend la valeur que na pas lentre.
On dit que la sortie est linverse ou le complment de lentre.
Proprit
- F F =
1.2. Opration ET (AND) :
Cest une opration sur 2 variables dentre au moins. Dans le cas simple de 2 entres A et B, la
sortie est vraie (gale 1) si A ET B sont vraies aussi.
A
F (norme IEEE)
F (norme IEC)
1
A
Symbole
IEEE: Institute of Electrical and Electronics Engineers.
IEC : International Electrotechnical Commission
A F
0 1
1 0
A F = (Se lit A barre)
Table de vrit
A
L
X
- Linterrupteur A ouvert (A=0) ; le relais X est non excit et le
contact qui lui est associ reste ferm (position de repos) ; la
lampe L est allume (L=1) : A=0 L=1.
- Linterrupteur A ferm (A=1) ; Le relais X est excit et le contact
qui lui est associ est devenu ouvert ; La lampe L est teinte
(L=0) : A=1 L=0 ; alors, L = Not A : A L=
Illustration lectrique
Fonct i on - Trai ter
84
.
Proprits
- La fonction AND est commutative associative: F = A.B = B.A.
- La fonction AND est : F = A.(B.C) = (A.B).C = A.B.C.
- La fonction AND est gnralisable pour n entres.
- Identits remarquables : 0. X X. et X X.X ; X X.1 ; 0 X.0 = = = =
1.3. Opration OU (OR) :
Cest une opration sur 2 variables dentre au moins. Dans le cas simple de 2 entres A et B, la
sortie est vraie (gale 1) si seulement A OU B est vraie. Cette opration est dite OU inclusive, car on
inclut le cas (A=B=1 ; F=1). On verra quil y a une autre fonction appele OU exclusive.
Le signe ">" indique que la sortie est gale 1 si le nombre des entres "1" est suprieur
ou gal 1 ; autrement dit, une entre au moins gale "1".
Proprits
- Comme la fonction AND, la fonction OR est commutative, associative et gnralisable pour n
entres :
- Identits remarquables :
. 1 X X et X X X ; 1 1 X ; X 0 X = + = + = + = +
B A L La lampe L est allume (L=1) si linterrupteur A ET
linterrupteur B sont ferms (A=B=1), soit L = A . B
Illustration lectrique
A B F
0 0 0
0 1 0
1 0 0
1 1 1
F = A . B = AB (se lit A ET B)
A
B
F (norme IEEE)
F (norme IEC)
&
A
B
Table de vrit
Symbole
A B F
0 0 0
0 1 1
1 0 1
1 1 1
F = A + B (se lit A OU B)
Table de vrit
Symbole
F (norme IEC)
> 1
A
B
A
B
F (norme IEEE)
L est allume (L=1) si A OU B est ferm
(A=1 OU B=1), soit L = A + B.
Illustration lectrique
B
A
L
Chapi t re 2 - Fonct i ons combi nat oi res de base
85
1.4. Proprits et thormes remarquables :
Proprits
- AC AB C) (B . A + = + (Distributivit du produit par rapport la somme) ;
-
C) (A . B) (A C) . (B A + + = +
(Distributivit de la somme par rapport au produit) ;
-
B B A AB = +
:
B 1 . B ) A B(A = = +
(Factorisation) ;
- A + AB = A :
A 1 . A B) A(1 = = +
(Loi d'absorption)
-
B A B A A + = +
; en effet,
= + B A A B A AB B A A + = + +
;
Thorme de De Morgan :
Ce thorme d'une grande utilit, permet de calculer le complment d'une expression logique
quelconque (somme de produits ou produit de sommes) :
- Y . X Y X = + ;
- Y X Y . X + = .
D'une faon gnrale, Le complment d'une expression quelconque s'obtient en complmentant les
variables et en permutant les oprateurs "+" et ".".
Exemple : D) A ( . ) D B (A D A BD A F D A BD A F + + + = + = + =
2. AUTRES OPERATIONS
2.1. Opration NAND :
Cest le complment de lopration AND.
Proprits
- La fonction NAND est commutative :.
- La fonction NAND nest pas associative :
- La fonction NAND est gnralisable pour n entres.
- L'oprateur NAND est dit "systme logique complet", car il permet de raliser toutes les
oprations de base : Not, AND et OR ; et par consquent, toute fonction logique :
Ralisation d'un inverseur :
Ralisation d'une AND (F = A . B) : En appliquant le thorme de De Morgan, A.B F F = =
A A A.A F = =
A
A A.1 F = =
1
B
A .B A
A.B F=
B.A A.B F = =
A.B.C ).C A.B ( ) B.C A.( F = = =
A B F
0 0 1
0 1 1
1 0 1
1 1 0
barre) tout B) ET (A lit (se B . A F =
Table de vrit
Symbole
A
B
F (norme IEEE)
A
B
F (norme IEC)
&
Fonct i on - Trai ter
86
Ralisation d'une OR (F = A + B) : De mme,
B . A F B A F = + =
(Morgan)
2.2- Opration NOR :
Cest le complment de lopration OR.
Proprits
- Comme la fonction NAND, la fonction NOR n'est ni combinatoire, ni associative ; elle est aussi
gnralisable pour n entres
- L'oprateur NOR est un systme logique complet, comme le NAND.
2.3. Opration XOR :
Comme on la signal prcdemment, cette opration diffre du OR classique ou inclusif ; lexamen
de sa table de vrit ci dessous montre que F est gale 1 si [(A=0 ET B=1) OU (A=1 ET B=0)] ;
formellement, on crit :
B A B A F + = qu'on note B A F =
Le signe "=" indique que la sortie est gale "1" si une entre et une seule est gale 1.
Proprets
- Lopration XOR est commutative : F = AB = BA.
- Lopration XOR est associative : F = A(BC) = (AB)C = ABC.
- Lopration XOR n'est pas gnralisable pour n entres.
Remarque :
L'oprateur OU Exclusif est considr comme l'oprateur programmable le plus lmentaire. En
effet, considrons sa table de vrit dans la figure suivante, on remarque que suivant l'tat de P,
l'oprateur ralise la fonction OUI ou la fonction NON. Alors P est l'entre de programmation de cet
oprateur.
B A B . A F + = =
B
A
A
B
A B F
0 0 1
0 1 0
1 0 0
1 1 0
barre) tout B) ET (A lit (se B . A F =
Table de vrit
Symbole
A
B
F (norme IEEE)
F (norme IEC)
> 1
A
B
A B F
0 0 0
0 1 1
1 0 1
1 1 0
B A F =
(se lit A OU exclusif B)
Table de vrit
Symbole
F (norme IEC)
= 1
A
B
F (norme IEEE)
A
B
Chapi t re 2 - Fonct i ons combi nat oi res de base
87
3. REPRESENTATION DES FONCTIONS LOGIQUES :
Pratiquement, une fonction logique est reprsente par :
- son quation logique qui n'est qu'une association de sommes et de produits logiques ;
- sa table de vrit ou son tableau de Karnaugh, qu'on verra dans le prochain chapitre ;
- Son logigramme qui est une reprsentation symbolique, sous forme d'un schma, form par les
diffrentes liaisons entres les symboles des oprateurs lmentaires.
Exemple : Voil les 3 reprsentations d'une certaine fonction F 3 variables A, X et Y :
- L'quation logique donne est : F (X, Y, A) = ;
- La table de vrit, dduite partir de l'quation, est : On a 3 variables d'entres on a 2
3
combinaisons possibles (2
3
lignes de la table). D'une faon gnrale, on a 2
n
combinaisons pour n
variables d'entre. On dduit l'quation logique de la fonction F, partir de la table de vrit
suivant le raisonnement suivant :
On cherche les lignes o la fonction F est gale 1 ;
On note la combinaison des entres pour chacune de ces lignes ;
On somme logiquement ces combinaisons.
Ainsi, la fonction F est gale 1 si on a Y X A OU XY A OU Y X A OU AXY , ce
qui donne :
F = Y X A + XY A + Y X A + AXY
= ) ( ) ( X X AY Y Y X A + + +
= AY X A +
- Le logigramme dduit de l'quation est :
On remarque que cette petite fonction emploie diffrents types de portes logiques : inverseur, AND et
OR. Il est vident qu'il serait rentable de raliser cette fonction logique avec le minimum de matriel
(circuits logiques), ce qui demande une bonne analyse du problme pour simplifier la fonction en
question.
A X Y F
0 0 0 0
0 0 1 0
0 1 0 1
0 1 1 1
1 0 0 0
1 0 1 1
1 1 0 0
1 1 1 1
A
F
P
P A F Fonction ralise par l'oprateur
0 0 0
0 1 1
SI P = 0 F = A Fonction Identit
1 0 1
1 1 0
SI P = 1 F = Not A Fonction Inversion
AY X A +
Y
X A
X A
AY
X
AY X A + .
Fonct i on - Trai ter
88
E X E R C I C E S R E S O L U S
EXERCICE N 1 :
Raliser un XOR uniquement avec 4 avec des NAND 2 entres.
EXERCICE N 2 :
D'aprs la table de vrit du XOR, on remarque que la sortie
vaut 1 uniquement si le nombre de 1 form par les 2 entres
est impair ; sinon, elle est 0. Le schma ci-contre gnralise
cette dtection de parit pour un mot de n bits.
Montrer par le raisonnement de rcurrence que c'est vrai.
CORRIGE :
EXERCICE N 1 :
F = B B B A A A B A B A B A + + + = + (Ajout de 2 termes nuls).
F = ) . ( ) . ( ) ( ) ( B A B B A A B A B B A A + = + + +
) . ( . ) . ( ) . ( ) . ( B A B B A A B A B B A A F = + = , ce qui correspond
4 portes NAND
EXERCICE N 2 :
Alors, on suppose que c'est vrai pour (n-1) :
P
n-1
= 1 (D
n-2
D
0
contient un nombre impaire de 1)
- Si D
n-1
= 0, P
n
= 1
- Si D
n-1
= 1, P
n
= 0
Ce qui est vrai.
P
n-1
= 0 (D
n-2
D
0
contient un nombre pair de 1)
- Si D
n-1
= 0, P
n
= 0
- Si D
n-1
= 1, P
n
= 1
Ce qui est vrai.
E X E R C I C E S N O N R E S O L U S
EXERCICE N 1 :
Comme le NAND, le NOR est un systme logique complet. Raliser alors les oprations de base avec cet
oprateur.
EXERCICE N 2 :
1- Montrer que Lopration NOR nest pas associative : C B A C ) B A ( ) C B ( A F + + = + + = + + = .
2- Faire de mme pour la porte NAND.
EXERCICE N 3 :
Raliser un comparateur entre 2 mots A et B de 4 bits, en se basant sur
l'aspect lmentaire de "dtecteur d'galit" du OU EXCLUSIF et en
utilisant des portes logiques de base :
- E = 0, s'il n'y a pas d'galit ;
- E = 1, s'il y a galit ;
A
B
F
D
0
D
1
D
2
D
n-1
P
n
D
n-1
P
n
P
n- 1
Dtecteur
d'galit
E
A
3
A
0
A
1
A
2
B
3
B
0
B
2
B
1
Chapi t re 3 - Si mpl i f i cat i on des f onct i ons l ogi ques
89
CHAPITRE 3
SIMPLIFICATION DES FONCTIONS LOGIQUES
INTRODUCTION :
Une fonction logique est sous forme normale ou canonique si chacun de ses termes contient toutes les
variables, directes ou inverses, dont elle dpend. Exemple : .Y X Y X. Y) F(X, + = .
Si l'une de ses variables ne figure pas dans un de ses termes, alors elle est sous forme simplifie. Cette
forme est fort bien recherche pour aboutir la ralisation pratique avec un minimum de matriel et
moindre cot. Pour cette fin, on utilise, en gnral, 3 mthodes :
- La mthode algbrique ;
- La mthode graphique base du diagramme de Karnaugh ;
- Les mthodes programmables.
Dans ce chapitre, on s'intresse uniquement aux 2 premires mthodes.
1. METHODE ALGEBRIQUE :
Cette mthode utilise les principes de l'Algbre de Boole. On en rappelle ci-aprs 3 parmi les plus
importants :
-
-
- ; en effet,
Le principe consiste mettre en oeuvre ces proprits, dans l'expression simplifier, par exemple en
ajoutant un terme dj existant :
Cette mthode apprend de la rigueur, mais elle n'est pratiquement plus utilise systmatiquement.
2. METHODE GRAPHIQUE :
2.1. Tableau de Karnaugh et principe de simplification :
Cette mthode plus simple utilise le tableau de Karnaugh pour simplifier des fonctions boolennes
ayant jusqu 6 variables. Le tableau de Karnaugh dune fonction logique est la transformation de sa
table de vrit sous forme dune table contracte 2 dimensions. La mthode consiste principalement
mettre en vidence graphiquement ou visuellement, les groupements de cases, de type :
A B B A B A AB = + = + ) (
Aussi, dans un tableau de Karnaugh, on peut utiliser une case plusieurs fois selon la relation de la
redondance :
X + X + + X = X
Le passage de la table de vrit au tableau de Karnaugh se fait selon la procdure suivante:
- Chaque ligne de la table de vrit correspond une case du tableau de Karnaugh ;
- Les cases sont disposes de telle sorte que le passage d'une case une case voisine se fasse
par changement de l'tat d'une seule variable la fois en utilisant le code GRAY.
C AB C B A BC A ABC Z + + + =
C AB C B A BC A ABC Z + + + + + = ABC ABC
AB AC BC + + = Z
B = + = + ) A B(A B A AB
A B A AB A = + = + ) 1 (
B A B A A + = +
) )( ( B A A A B A A + + = + B A B A A A AB AA + = + + + =
Fonct i on - Trai ter
90
La mise en uvre de cette mthode se fait alors en 2 phases :
- La transcription de la fonction
simplifier dans le tableau de
Karnaugh ;
- La recherche des groupements de
cases qui donneront des
expressions simplifies.
Pour illustrer le passage de la table de
vrit au tableau de Karnaugh, la figure 4
montre un exemple pour 3 variables.
2.2. Exemples de simplification par tableau de Karnaugh :
2.3. Conclusion :
- On ne regroupe pas des cases qui ne sont pas symtriques, car cela ne donne pas de termes
vrifiant la forme simplificatrice : A B B A B A AB = + = + ) ( .
- Le nombre de variables supprimes dpend de la taille du groupement. Ainsi :
Un groupement de 2 cases symtriques entrane la suppression dune variable ;
Un groupement de 4 cases symtriques entrane la suppression de 2 variables ;
En gnral, un groupement de 2
k
cases entrane la suppression de k variables.
00 01 11 10
0 0 0 1 1
1 0 0 0 1
A
BC
F2
C B B A F + = 2
Exemple 2 :
00 01 11 10
00 1 1 0 1
01 1 1 0 0
11 1 1 0 0
10 1 1 0 1
AB
CD
F3
M
D B C F + = 3
Exemple 3 :
Dans le groupement 1, c'est B qui a
vari, ce qui donne C A ;
Dans le groupement 2, c'est A qui a
vari, ce qui donne C B .
00 01 11 10
0 0 1 1 1
1 0 0 0 1
A
BC
F1
C B C A F + = 1
Exemple 1 :
G1
G2
Dans ces 2 groupements, on rutilise
une case utilise par les 2 groupement
suivant la loi de redondance
(X + Y + X = X +Y).
Fig4. Simplification par tableau de Karnaugh
A B C F2
0 0 0 0
0 0 1 1
0 1 0 1
0 1 1 0
1 0 0 1
1 0 1 0
1 1 0 0
1 1 1 1
00 01 11 10
0 0 1 0 0
1 1 0 1 0
A
BC
F2
Chapi t re 3 - Si mpl i f i cat i on des f onct i ons l ogi ques
91
E X E R C I C E S R E S O L U S
EXERCICE N 1 :
Simplifier la fonction suivante en utilisant le principe qui consiste multiplier un terme gal 1 X) (X + :
EXERCICE N : Store automatis
Le systme de commande du store tudi dans cet exemple est simplifi
par rapport la ralit pour des raisons didactiques ; en effet le
fonctionnement correct du systme ncessite des temporisations et des
fonctions de mmoire qui ne sont pas tudies ici :
- Si la luminosit du soleil (s), capte par une cellule solaire, dpasse un
seuil prdfini, on descend le store (D) ;
- 2 boutons poussoirs permettent la descente (d) ou la monte (m) du
store ; un appui simultan sur les 2 boutons entrane la descente du
store ;
- Si la vitesse du vent (v), capte par un anmomtre, dpasse un seuil
prdfini, on remonte le store ; ce fonctionnement de scurit est
prioritaire sur tous les autres.
Donner l'quation de la monte du Store M, ainsi que son logigramme, en dressant la table de vrit du
systme et en utilisant le tableau de Karnaugh.
CORRIGE :
EXERCICE N 1 :
.
EXERCICE N 2 :
AC
C B
AB
Z
+ + =
00 01 11 10
00 0 0 0 1
01 0 0 1 0
11 1 1 1 1
10 1 1 1 1
v s
m d
M
v d m s M + =
v s m d M D
0 0 0 0 0 0
0 0 0 1 0 1
0 0 1 0 1 0
0 0 1 1 0 1
0 1 0 0 0 1
0 1 0 1 0 1
0 1 1 0 0 1
0 1 1 1 0 1
1 0 0 0 1 0
1 0 0 1 1 0
1 0 1 0 1 0
1 0 1 1 1 0
1 1 0 0 1 0
1 1 0 1 1 0
1 1 1 0 1 0
1 1 1 1 1 0
Table de vrit
AC
C B
AB
Z + + =
( ) ( )
C B AB Z
A C B C AB B AC ACB C B AB Z
+ =
+ + + = + + + = 1 . 1 .
B
B
AC
C
B
AB
+ + + =
.
( )
Fonct i on - Trai ter
92
CHAPITRE 4
FONCTIONS COMBINATOIRES AVANCEES
INTRODUCTION :
Dans les systmes numriques, on utilise souvent des fonctions qui on justifi leurs ralisations en
circuits intgrs. On note en particulier les dcodeurs, les multiplexeurs, les dmultiplexeurs et les
circuits arithmtiques. Bien qu'ils soient plus ou moins remplacs actuellement par les systmes
programmables (circuits logiques programmables et microprocesseur), ils sont encore utiliss.
1. LES DECODEURS :
La fonction de dcodage consiste faire correspondre un code prsent en entre sur n lignes, un
autre code en sortie sur m lignes avec en gnral m = n :
1.1. Dcodeur 1 parmi n:
Ce type de dcodeur permet de faire correspondre un code prsent en entre sur n lignes une
sortie et une seule active parmi les N = 2n sorties possibles. On le dsigne aussi par dcodeur m lignes
vers n lignes. Pour comprendre le principe d'un tel dcodeur, tudions le dcodeur 1 parmi 4 ou
2 vers 4, donn la figure 1 ; le niveau active des sorties est le 0, car c'est souvent le cas :
Directement ou l'aide de la table de Karnaugh, on dtermine les quations de sorties :
B . A Y
A . B Y
A . B Y
A . B Y
3
2
1
0
=
=
=
=
Le schma d'implmentation du dcodeur sera alors
celui de la figure 2 ci-contre :
Dcodeur
n lignes
m lignes
ENTREES SORTIES
B A Y0 Y1 Y2 Y3
0 0 0 1 1 1
0 1 1 0 1 1
1 0 1 1 0 1
1 1 1 1 1 0
DEC
1/4
A
B
Y0
Y1
Y2
Y3
Fig. 1 : Dcodeur 1 parmi 4 avec sorties actives sur niveau bas
Y0
Y1
Y2
Y3
A B
Fig. 2 : Logigramme de dcodeur 1 parmi 4
Chapi t re 4 - Fonct i ons combi nat oi res avances
93
Les circuits intgrs ralisant cette fonction contiennent des entres de validation comme G ou E
permettant de slectionner le circuit. On peut citer comme exemple le double dcodeur 74LS156 dont
le brochage et la table de fonction sont donns la figure 3 :
1.2. Dcodeur BCD 7 segments :
Ce type de dcodeur permet de convertir le code BCD 4bits l'entre pour obtenir la sortie un
code 7 segments permettant de commander un afficheur 7 segments permettant l'criture de tous les
chiffres et aussi d'autres symboles comme le montre la figure 4 :
Pour mettre en quation ce type de dcodeur, il faut dresser la table de vrit suivante :
ENTREES SORTIES
Nombre BCD
dcoder
D C B A a b c d e f g
0 0 0 0 0 1 1 1 1 1 1 0
1 0 0 0 1 0 1 1 0 0 0 0
2 0 0 1 0 1 1 0 1 1 0 1
3 0 0 1 1 1 1 1 1 0 0 1
4 0 1 0 0 0 1 1 0 0 1 1
5 0 1 0 1 1 0 1 1 0 1 1
6 0 1 1 0 0 0 1 1 1 1 1
7 0 1 1 1 1 1 1 0 0 0 0
8 1 0 0 0 1 1 1 1 1 1 1
9 1 0 0 1 1 1 1 0 0 1 1
Fig. 3 : Diagramme de brochage et table de fonctionnement du 74LS156
a
b
c
d
e
f
g
Identification des segments Dsignations numriques et rsultat de l'affichage
Fig. 4 : Afficheur 7 segments
Fonct i on - Trai ter
94
La table de karnaugh de chaque segment permet alors d'obtenir les quations de ce dcodeur. Les 0
tant les moins nombreux, l'criture des quations de commande d'extinction des segments sera plus
facile :
C . B . A C . B . A C . B . A d C . B . A c C . B . A C . B . A b C . A D . C . B . A a + + = = + = + =
C . B . A D . C . B g C . B B . A D . C . A f C . B A e + = + + = + =
Comme exemple de dcodeur, on peut citer le circuit intgr 74LS47 dont le schma de brochage et
la table de vrit sont donnes la figure 5 :
2. LE MULTIPLEXEUR :
Un multipl exeur permet de slectionner une entre parmi 2n pour transmettre l'information porte par
cette ligne un seul canal de sortie. La slection de l'entre se fait alors l'aide de n lignes d'adressage.
Pour comprendre le principe, considrons un multiplexeur quatre entres (figure 6), donc deux lignes
d'adressage et une ligne de sortie :
Fig. 5 : Diagramme de brochage et table de fonctionnement du 74LS47
MUX
4 vers 1
Y
B
E0
E1
E2
E3
A
Adresses
E
n
t
r
e
s
ADRESSES SORTIE
B A Y
0 0 E0
0 1 E1
1 0 E2
1 1 E3
Fig. 6 : Multiplexeur 4 vers 1
Chapi t re 4 - Fonct i ons combi nat oi res avances
95
De la table de vrit, on dduit l'expression
logique de la sortie Y :
3 E . B . A 2 E . B . A 1 E . B . A 0 E . B . A Y + + + =
Le schma d'implantation du multiplexeur 4 vers
1 sera celui de la figure 7 ci-contre.
Les circuits intgrs ralisant cette fonction contiennent des entres de validation (Strobe - Enable)
permettant de slectionner le circuit comme le 74LS151 qui est multiplexeur 8 vers 1 (figure 8) :
3. LE DEMULTIPLEXEUR :
Le dmultiplexeur effectue l'opration inverse d'un multiplexeur savoir il permet de distribuer
l'information prsente l'entre vers l'une des 2n sorties. La slection de la sortie se fait l'aide de n
lignes d'adressage. Pour comprendre le principe, considrons un dmultiplexeur quatre sorties (voir
figure 9), donc deux lignes d'adressage et une ligne d'entre :
E3 E2 E1 E0
A B
Y
Fig. 7 : Logigramme de multiplexeur 4 vers 1
Fig. 8 : Diagramme de brochage et table de fonctionnement du 74LS151
DEMUX
1 vers4
E
B
S0
S1
S2
S3
A
Adresses
S
o
r
t
i
e
s
ADRESSES SORTIES
B A S0 S1 S2 S3
0 0 E 0 0 0
0 1 0 E 0 0
1 0 0 0 E 0
1 1 0 0 0 E
Fig. 9 : Demultiplexeur 1 vers 4
Fonct i on - Trai ter
96
A partir de la table de vrit, on dtermine les
quations de sortie suivantes :
B . A . E S
A . B . E S
A . B . E S
A . B . E S
3
2
1
0
=
=
=
=
Le schma d'implmentation du dmultiplexeur sera
alors celui de la figure 10 ci-contre :
Les circuits intgrs ralisant cette fonction contiennent des entres de validation (Strobe et Enable)
permettant de slectionner le circuit comme le 74LS155 qui est un double dmultiplexeur 1 vers 4 dont le
schma de brochage et la table de vrit sont donnes la figure 11 :
4. L'ADDITIONNEUR :
4.1- Le demi-additionneur :
C'est un circuit permettant d'effectuer l'addition de deux bits A et B pour gnrer leur somme et
leur retenue C (Carry) comme le montre le schma et la table de vrit de la figure 12 :
A
B
C
ENTREES SORTIES
B A C
0 0 0 0
0 1 1 0
1 0 1 0
1 1 0 1
Fig. 12 : Le Demi-Additionneur
S0
S1
S2
S3
A B
E
Fig. 10 : Logigramme de dmultiplexeur 1 vers 4
Fig. 11 : Diagramme de brochage et table de fonctionnement du 74LS155
Chapi t re 4 - Fonct i ons combi nat oi res avances
97
A partir de la table de vrit, on peut crire les deux
fonctions sous la forme suivante :
B . A C B A B . A B . A = = + =
Ce qui peut tre ralis par le circuit schmatis sur le
logigramme de la figure 13 ci-contre.
4.2- L'additionneur complet :
Pour effectuer une addition de deux nombres binaires de n bits, on additionne successivement les
bits du mme poids en tenant compte de la retenue de l'addition prcdente comme le montre
l'exemple suivant :
Il faut donc concevoir une cellule lmentaire appele additionneur complet et qui permet de
raliser l'addition des bits ai et bi en plus de la retenue Ci-1 de l'addition prcdente. Un tel circuit est
dfinit par le schma et la table de vrit de la figure 14 :
A l'aide de la table de Karnaugh, on dtermine les quations de sorties suivantes :
1 i i i 1 i i i 1 i i i 1 i i i 1 i i i i
C b a C . b . a C . b . a C . b . a C . b . a S
= + + + =
( )
1 i i i i i 1 i i i 1 i i i i i i
C . b a b . a C . b . a C . b . a b . a C
+ = + + =
C
B A
Fig. 13 : Le Demi-Additionneur
a
3
a
2
a
1
a
0
b
3
b
2
b
1
b
0
S
3
S
2
S
1
S
0
C
3
C
2
C
1
C
0
Nombre A
Nombre B
Somme : S = A+B
Retenues
ai
bi
Si
Ci
Ci-1
ENTREES SORTIES
ai bi Ci-1 Si Ci
0 0 0 0 0
0 0 1 1 0
0 1 0 1 0
0 1 1 0 1
1 0 0 1 0
1 0 1 0 1
1 1 0 0 1
1 1 1 1 1
Fig. 14 : Additionneur complet
Fonct i on - Trai ter
98
Le schma d'implantation de l'additionneur complet sera celui de la figure 15 :
Comme exemple d'additionneur complet de mots de 4 bits , on peut citer le circuit intgr 74LS83
dont le schma de brochage et la table de vrit sont donnes la figure 16 :
5. LE COMPARATEUR :
Un comparateur est un circuit permettant de dtecter l'galit de deux nombres et ventuellement
d'indiquer le nombre le plus grand ou le plus petit.
ai bi Ci-1
Si
Ci
Fig. 15 : Logigramme d'un additionneur complet
Fig. 16 : Additionneur 4bits 74LS83
Chapi t re 4 - Fonct i ons combi nat oi res avances
99
Pour comprendre le principe, on va raliser un comparateur simple permettant de comparer deux mots
de 1 bit. La table de vrit d'un tel comparateur est donne la figure 17 :
A partir de la table de vrit, on peut crire les trois fonctions sous la forme suivante :
3 S 1 S 3 S B . A 2 S B . A 1 S = = =
Le schma d'implantation de ce comparateur 2 bits sera celui de la figure 18 :
Comme exemple de comparateur binaire, on peut citer le circuit intgr 74LS85 dont le schma de
brochage et la table de vrit sont donnes la figure 19 :
A
B
A<B
A=B
A>B
Comparateur
ENTREES SORTIES
B A S1:A<B S2:A=B S3:A>B
0 0 0 1 0
0 1 0 0 1
1 0 1 0 0
1 1 0 1 0
Fig. 17 : Comparateur de 2 mots de 1 bit
A B
A>B
A=B
A<B
Fig. 18 : Logigramme du comparateur de 2 mots de 1 bit
Fig. 19 : Comparateur 4 bits 74LS85
Fonct i on - Trai ter
100
E X E R C I C E S R E S O L U S
EXERCICE N1:
En utilisant deux dcodeurs 1/4, raliser un dcodeur 1/8 :
EXERCICE N2:
Raliser un additionneur complet en utilisant deux demi-additionneurs :
EXERCICE N3:
On dsire afficher le rsultat de la comparaison de deux nombres binaires 4 bits A et B avec un afficheur 7
segments. Etudier le circuit qui permet de rendre lumineux les segments de faon afficher :
CORRIGES :
EXERCICE N1 :
EXERCICE N2 :
1/4
A
B
Y0
Y1
Y2
Y3 ST
ST : entre de validation active sur niveau haut
A
B
C
1/4
A
B
Y0
Y1
Y2
Y3 ST
1/4
A
B
Y0
Y1
Y2
Y3 ST
Y0
Y1
Y2
Y3
Y4
Y5
Y6
Y7
A
B
C
A
B
C
A
B
C
A
B
Ci-1
Ci
Si A > B
Si A = B
Si A < B
Chapi t re 4 - Fonct i ons combi nat oi res avances
101
EXERCICE N3 :
E X E R C I C E N O N R E S O L U
L'tude suivante permettra de dterminer le rle du circuit logique du schma suivant :
Le circuit intgr 74LS42 est un dcodeur 1 parmi 10 qui est utilis uniquement comme un dcodeur 1
parmi 4 :
1. C = 0. Donner l'tat direct de S0, S1, S2 et S3 ;
2. C = 1 :
a. complter la table de vrit suivante :
b.
C A1 A0 S0 S1 S2 S3
1 0 0 E
1
1
1
c. c. Donner alors l'expression de S0, S1, S2 et S3 en fonction de C, A1, A0 et E.
3. Quelle est alors la fonction de l'ensemble du circuit ?
74LS42
B C D A
Y0 Y3 Y2 Y1
A0 A1
E
C
S0 S1 S2 S3
A
B
A<B A=B A>B
Comparateur
a
b
c
d
e
f
g
7 rsistances
Fonct i on - Trai ter
102
S Q
R
CHAPITRE 5
NOTION DE MEMOIRE
INTRODUCTION :
A la diffrence d'un circuit combinatoire, l'tat d'un circuit squentiel dpend de l'tat de ses entres
et de l'tat prcdent de ses sorties ; il doit donc "se rappeler" ou avoir de la "mmoire". Par mmoire, on
exprime le phnomne qui consiste conserver l'effet d'un vnement aprs sa disparition.
1. CIRCUIT MEMOIRE EN TECHNOLOGIE ELECTRIQUE :
Pour introduire ce type de circuit, on tudie un exemple simple et classique dans ce domaine ; il
s'agit de la commande d'un moteur d'une perceuse par exemple :
- Un bouton "m" permet de mettre en marche le moteur et un bouton "a" permet de l'arrter ;
- Quand on appuie sur le bouton m, le moteur dmarre ; quand on relche le bouton, le moteur
continue tourner. L'ordre de mise en marche a donc t mmoris ;
- Il en est de mme pour le bouton a ;
- L'action arrt est prioritaire : si m et a sont appuys en mme temps, on arrte le moteur.
On connat dj la solution de ce problme, figurant dans le circuit d'auto maintien ou d'auto-
alimentation :
- Le bouton m est un contact ouvert au repos ; le bouton a est un
contact ferm au repos. Le relais K dispose de 2 contacts : un
utilis dans le circuit de commande et l'autre utilis dans le
circuit de puissance.
- Quand l'utilisateur appuie sur m, la bobine du relais est
alimente. Les contacts K associs se ferment. Si l'utilisateur
relche m, le courant continue circuler par K ; le relais est
alors auto-aliment et le moteur continue tourner. L'quation
du relais X et du moteur M est :
a m K K ). ( + =
Il s'agit du circuit mmoire lmentaire en technologie lectrique.
2. CIRCUIT MEMOIRE EN TECHNOLOGIE ELECTRONIQUE :
Les circuits mmoire lectroniques sont d'une grande varit diffrents champs d'application ; on
tudie ici le circuit le plus lmentaire, qu'on peut qualifier de circuit de base pour tous les autres ; il
s'agit de la bascule SR :
- Son symbole est reprsent par la figure ci-contre ;
- On l'appelle bascule, car elle bascule d'un tat l'autre
suivant l'tat de ses entres S et R ;
- S (Set) est l'entre de mise 1 de la sortie Q ;
- R (Reset) est l'entre de mise 0 de la sortie Q.
On dveloppera le circuit de cette bascule en utilisant 2 approches :
- Dans l'approche 1, on exploite le rsultat du paragraphe 1 ;
- Dans l'approche 2, on utilise le raisonnement comme pour un circuit combinatoire.
K
K m
a
24 V
Circuit de
commande
K
Circuit de
puissance
M
220 V
Chapi t re 5 - Not i on de mmoi re
103
2.1. Approche 1 :
Dans cette approche, on part de l'quation d'auto-alimentation
du relais et on fait la correspondance logique : S correspond m, R
correspond a et Q correspond K. On en dduit alors l'quation
de la bascule SR avec Reset prioritaire, ainsi que son logigramme :
R S Q Q ). ( + =
Ce circuit est plus connu par sa ralisation simplifie avec
l'utilisation de portes NOR :
2.2. Approche 2 :
Dans cette approche, on raisonne comme pour un circuit combinatoire. Il est donc ncessaire de
connatre ltat de Q pour connatre ltat de la sortie lorsque les deux entres sont 0 (tat de
mmoire). On introduit alors une variable supplmentaire qui indique l'tat prcdent de Q. On note
"q" cette variable.
E X E R C I C E R E S O L U
Il s'agit de trouver la version lectronique du montage Marche/Arrt du moteur ; le circuit utilis est
le circuit CMOS CD4011 comportant 4 portes NOR 2 entres.
CORRIGE :
Le montage est le suivant :
L'appui sur m correspond
l'action Set de la bascule SR, ce
qui fait conduire le transistor T1
et exciter le relais K ; le moteur
tourne ; le relchement de ce
bouton correspond la
mmorisation de cet tat ;
L'appui sur a correspond l'action Reset, ce qui fait bloquer T1 et dsexciter le relais K ;
le moteur s'arrte ; le relchement de ce bouton correspond la mmorisation de cet tat.
R
S
Q
Retour permettant au circuit de se "rappeler"
S R Q Fonction de la bascule
0 0 x Mmorisation
0 1 1 Action Reset
1 0 0 Action Set
1 1 0 Action Reset
(
*
)
X indique l'tat prcdent (0 ou 1)
(
*
)
Etat indtermin si on passe SR=00.
R
S
Q Q Q=
R S Q ). ( + =
R S Q + + = ) (
S R q Q
0 0 0 0
0 0 1 1
0 1 0 0
0 1 1 0
1 0 0 1
1 0 1 1
1 1 0 0
1 1 1 0
Q Rq
S 00 01 11 10
0 0 1 0 0
1 1 1 0 0
Puisqu' on a (q = Q), alors :
q R R S Q + =
R S q ). ( + =
R S Q Q ). ( + =
R
S
Q
m
R2
a
R1
D1 K
R3
T1
K
Circuit de
puissance
M
220 V
Circuit de
commande
12 V
CD4001
CD4001
Fonct i on - Trai ter
104
CHAPITRE 6
FONCTIONS SEQUENTIELLES
1. LES BASCULES :
A linstar des oprateurs logiques lmentaires en logique combinatoire, les bascules (appeles aussi
flip-flop) sont les lments de base de la logique squentielle
1.1. Bascule SR Asynchrone :
Les bascules RS sont la base de tous les lments de mmorisation. Il s'agit d'un montage utilisant
deux portes NAND et capable de mmoriser un niveau logique choisi laide de deux sorties
complmentaires. Son schma est donn la figure 1 :
La table de vrit dune telle bascule est la suivante :
Entres Etat prcdent
Sorties
Commentaires
0 0 0 0 1
0 0 1 1 0
Mmorisation de ltat prcdent
0 1 X 0 1 Remise zro de la sortie Q
n
1 0 X 1 0 Remise un de la sortie Q
n
1 1 X 1 1 Etat indfini
Parmi les circuits intgrs bascules , on trouve le 74279 dont la table de fonction et le schma
de brochage sont donns la figure 2 :
Cette bascule prsente deux inconvnients majeurs :
- Sensibilit de la sortie Q aux changements indsirables (parasites) des entres S et R ;
- La configuration S = R = 1 est viter parce qu'elle conduit lgalit entre les deux
sorties et donc il ny a plus complmentarit comme cest indiqu dans la dfinition de
la bascule ;
Q et Q
S
Q
Q
R
Q
Q
SET
CLR
S
R
S
R
Fig. 1 : Bascule SR asynchrone
R S
Fig. 2 : Brochage et table de vrit du 74279
S R
1 n
Q
n
Q
n
Q
Chapi t re 6 - La l ogi que squent i el l e
105
1.2. Bascule SR Synchrone :
La bascule SR synchrone (figure 3) permet de rsoudre le premier inconvnient de la bascule SR
asynchrone. Les ordres Set et Reset ne changent ltat de la sortie quaprs lautorisation dun signal
de commande G (Gate) :
La table de vrit dune telle bascule est la suivante :
Commentaires
0 X X Mmorisation de ltat de la sortie
1 0 0
1 0 1 0
1 1 0 1
Fonctionnement normal de la bascule SR
Le changement dtat de cette bascule est autoris sur niveau logique 1 du signal de commande G.
On dit que cest une bascule commande de manire statique (sur niveau logique 0 ou 1) et sa
reprsentation est donne la figure 4 :
1.3. Bascule D :
La bascule D est drive de la bascule SR en ajoutant un inverseur entre Set et Reset pour n'avoir
plus qu'une seule entre pour fixer le niveau mmoriser. Avec un tel montage, il n'y a plus de
combinaisons d'entres invalides (S=R=1) :
La table de vrit dune telle bascule est la suivante :
Commentaires
0 X Mmorisation de ltat de la sortie
1 0 0 Mise zro de la sortie Q
1 1 1 Mise un de la sortie Q
S
Q
Q
R
G
Q
Q
SET
CLR
S
R
G
Fig. 3 : Bascule SR synchrone
Bascule SR active sur niveau haut Bascule SR active sur niveau bas
Q
Q
SET
CLR
S
R
G
Q
Q
SET
CLR
S
R
G
Fig. 4: Bascule SR statique
Q
Q
SET
CLR
D
G
G
D
Q
Q
SET
CLR
S
R
G
Q
Q
Fig. 5: Bascule D
1 n
Q
1 n
Q
n
Q G R S
G
D
n
Q
1 n
Q
Fonct i on - Trai ter
106
Le changement dtat dune bascule D peut aussi tre autoris par le front montant ou le front
descendant du signal de commande G. On parle alors de bascule D dynamique (figure 6) :
Parmi les circuits intgrs bascules D, on trouve le 7475 dont la table de fonction et le schma de
brochage sont donns par la figure 7 :
1.4. Bascule JK :
Le principe des bascules dynamiques permet de mieux protger la bascule contre les changements
indsirables des entres. La bascule JK permet en plus de lever lambigut qui existe pour ltat
S=R=1 dune bascule SR. Son symbole et sa table de vrit sont les suivants :
Parmi les circuits intgrs bascules JK, on trouve le 7476 dont la table de fonction et le schma de
brochage sont donns la figure 8 :
CK J K
n
Q
Commentaires
|
0 0
1 n
Q
Mmorisation de ltat de la sortie
|
0 1 0 Mise 0 de la sortie Q
|
1 0 1 Mise 1 de la sortie Q
|
1 1
1 n
Q
Basculement de ltat de la sortie
J
Q
Q
K
SET
CLR
C
K
Pr
Clr
Q
Q
SET
CLR
D
G
Q
Q
SET
CLR
D
G
Bascule D active sur front descendant Bascule D active sur front montant
Fig. 6: Bascule D dynamique
Fig. 7: Brochage et table de vrit du 74LS75
Fig. 8: Brochage et table de vrit du 74LS76
Chapi t re 6 - La l ogi que squent i el l e
107
Si on utilise la bascule JK avec J = K = 1, on obtient lune des principales applications de la bascule
JK savoir le diviseur de frquence par 2 (figure 9) :
1.5. Fonctionnement forc des bascules :
Il est parfois ncessaire daffecter le niveau de sortie dune bascule de manire non synchrone
c'est--dire indpendamment de lhorloge. Cest le rle des entres de forage asynchrone Preset (Set)
et Clear (Clr) qui permettent dinitialiser la bascule :
PR Clr
n
Q
Commentaires
0 0
n
Q
Fonctionnement normal de la bascule
0 1 0 Forage 0 de la sortie Q
1 0 1 Forage 1 de la sortie Q
2. LES COMPTEURS :
Un compteur est un ensemble de n bascules interconnectes par des portes logiques. Ils peuvent
dcrire, au rythme dun signal de commande appel horloge, une suite d'tats binaires. Il ne peut y avoir
au maximum que 2n combinaisons et le nombre total N des combinaisons successives est appel le modulo
du compteur. Les compteurs binaires peuvent tre classs en deux catgories :
- Les compteurs asynchrones ;
- Les compteurs synchrones ;
2.1. Compteur asynchrone modulo N = 2
n
:
Ce type de compteur est constitu de n bascules JK fonctionnant en mode T (Toggle) : J=K=1. Ces
bascules sont montes en cascade c'est--dire le signal dhorloge commande uniquement la premire
bascule tandis que pour chacune des autres bascules le signal d'horloge est fourni par la sortie de la
bascule de rang immdiatement infrieur. Pour bien comprendre le principe, ralisons un compteur
modulo 8 permettant de compter de 0 7 comme le montre la figure 10 :
J
Q
Q
K
SET
CLR
C
K
Pr
Clr
Ve
Vs
t
t
J
Q
Q
K
SET
CLR
CK
1
Ve
Vs
Fig. 9: Diviseur de frquence par 2
Horloge
1 1
1
Q0 Q1 Q2
Remise 0
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
Fig. 10: Compteur asynchrone module 8
Fonct i on - Trai ter
108
Les chronogrammes et al table de vrit d'un tel compteur sont donns la figure 11 :
H
) (MSB 3 Q 2 Q ) (LSB 1 Q
0 0 0
+
0 0 1
+
0 1 0
+
0 1 1
+
1 0 0
+ 1 0 1
+
1 1 0
+
1 1 1
+
0 0 0
2.2. Compteur asynchrone modulo N = 2n :
Pour ce type gnral de compteur qui compte de 0 N-1, on va tudier lexemple dun compteur
asynchrone modulo 10 (0 9). Pour le raliser, il y a deux tapes :
- On cherche dabord la puissance de 2 immdiatement suprieure N et qui est pour notre
compteur 2
4
= 16. Lexposant de cette puissance de 2 donne le nombre de bascules JK
monter en cascade, 4 pour notre exemple ;
- On dtecte ensuite ltat N qui remettra le compteur 0 et qui est pour notre compteur
10 = (1010)
2
. On relie les sorties Q = 1 (Q1 et Q3) pour N aux entres dune porte NAND dont la
sortie commandera lentre CLR de chaque bascule (figure 12).
H
Q0
t
t
t
t
Q1
Q2
0
0
0
1
0
0
0
0
1
1
1
0
0
1
0
0
0
0
1
0
0
1
1
1
0
1
1
1
0
1
Q
0
Q
1
Q
2
0 1 3 4 5 6 7 0 1 2
N
Fig. 11: Chronogrammes et table de vrit d'un compteur asynchrone module 8
Horloge
1 1 1
Q0 Q1 Q2 Q3
1
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
Remise 0 des 4
bascules
H
Q0
t
t
t
t
Q1
Q2
0 1 3 4 5 6 7 8 9 2
N
Q3
0
Fig. 12: Compteur asynchrone modulo 10
Chapi t re 6 - La l ogi que squent i el l e
109
Les compteur 7490 (modulo 10), 7492 (modulo 12) et 7493 (modulo 16) sont des compteurs
asynchrones (figure 13) composs de 4 bascules dont les connexions internes varient suivant le type du
compteur :
2.3. Compteur synchrone modulo N :
Linconvnient du compteur asynchrone cest le temps de rponse de chaque bascule. Ainsi, le
signal d'horloge ne parvient pas simultanment sur toutes les bascules. Ceci a pour consquence de
provoquer des tats transitoires qui peuvent tre indsirables.
Supposons un temps de rponse tr identique pour toutes les
bascules et considrons la chronologie du passage d'un compteur
asynchrone 3 bits de 011 100 dans la figure ci-contre. Nous
constatons que le compteur passe par les tats transitoires 011 et
001 qui sont faux en plus dun temps de propagation qui a tripl.
Dans un compteur synchrone toutes les bascules reoivent en
parallle le mme signal d'horloge. Pour faire dcrire au
compteur une squence dtermine il faut chaque impulsion
d'horloge dfinir les entres synchrones J et K.
Pour cela on utilise la table de transition de la bascule J-K ainsi que la table de vrit dcrivant la
squence du compteur. Prenons lexemple dun compteur modulo 8 :
n
Q
1 n
Q
+
J K
0 0 0 X
0 1 1 X
1 0 X 1
1 1 X 0
Table dexcitation
3 Q 2 Q 1 Q
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Fig. 13: Exemples de compteur asynchrones
t
t
t
3.tr
Fig. 14: Temps de rponse
Fonct i on - Trai ter
110
La rsolution du problme consiste chercher les quations des entres J et K de chaque bascule
laide de la table des tats recherchs :
J
0
= K
0
= 1
J1 = K1 = Q0
J2 = K2 = Q0.Q1
Le montage du compteur synchrone 3 bits est donn la figure 15 :
3. LES REGISTRES :
3.1. Prsentation :
Un registre est constitu dun assemblage de n bascules D permettant la mmorisation temporaire
de n bits avec ou sans dcalage. L'information est emmagasine sur un signal de commande et ensuite
conserve et disponible en lecture. La figure 16 donne un exemple de registre de mmorisation 4
bits avec le signal d'criture W (Write) qui commande la mmorisation des donnes D0, D1, D2 et D3:
J
0
Q1 Q0
00 01 11 10
0 1 x X 1
Q2
1 1 X X 1
K
0
Q1 Q0
00 01 11 10
0 X 1 1 X
Q2
1 X 1 1 X
J
1
Q1 Q0
00 01 11 10
0 0 1 X X
Q2
1 0 1 X X
K
1
Q1 Q0
00 01 11 10
0 X X 1 0
Q2
1 X X 1 0
J
2
Q1 Q0
00 01 11 10
0 0 0 1 0
Q2
1 X X X X
K
2
Q1 Q0
00 01 11 10
0 X X X X
Q2
1 0 0 1 0
Horloge
1
Q0 Q1 Q2
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
Fig. 15: Compteur synchrone modulo 8
Q
Q
SET
CLR
D
Q
Q
SET
CLR
D
Q
Q
SET
CLR
D
Q
Q
SET
CLR
D
W
D0 D1 D2 D3
Q0 Q1 Q2 Q3
Fig. 16: Registre de mmorisation 4bits lecture / criture parallles
Chapi t re 6 - La l ogi que squent i el l e
111
3.2. Les registres dcalage :
Dans un registre dcalage les bascules sont interconnectes de faon ce que l'tat logique de la
bascule de rang i puisse tre transmis la bascule de rang i+1 (ou i-1) quand un signal d'horloge est
appliqu l'ensemble des bascules.
L'information peut tre charge de deux manires :
- Entre parallle : comme dans le cas d'un registre de mmorisation ;
- Entre srie : l'information est prsente squentiellement bit aprs bit l'entre de la
premire bascule. Le dcalage peut alors tre vers la gauche ou la droite.
De mme, linformation peut tre lue en srie ou en parallle. La figure 17 rsume les modes de
fonctionnement dun registre dcalage :
Un registre dcalage universel aura donc la structure de la figure 18 :
Parmi les registres universels, on trouve le 74194 qui est un registre chargement parallle ou
srie, avec la possibilit dun dplacement de linformation vers la droite (QA vers QD) ou la gauche
(QD vers QA). La description et le schma de brochage sont donns la figure 19 :
r3 r2 r1 r0
Ecriture / Lecture
parallle
r3 r2 r1 r0
Lecture parallle
r3 r2 r1 r0
SR r3 r2 r1
Ecriture srie avec
dcalage droite
r3 r2 r1 r0
r2 r1 r0 SL
Ecriture srie avec
dcalage gauche
Fig. 17: Modes de fonctionnement d'un registre dcalage
Fig. 18: Structure d'un registre dcalage universel
A B C D
Donnes dentre
Donnes de sortie
Q
A
Q
B
Q
C
Q
D
Entre srie droite
Entre srie gauche
Horloge
Sens du dcalage
Chargement parallle
REGISTRE
Fig. 19: Brochage et table de fonctionnement du registre universel 74LS194
Fonct i on - Trai ter
112
4. LES MEMOIRES :
4.1. Introduction :
Les systmes modernes sont souvent microprocesseur de tels systmes exigent une capacit
mmoire importante pour le stockage des donnes. Les mmoires lectroniques ou semi-conducteurs
sont les lments qui rpondent ce besoin.
Une mmoire est un dispositif capable demmagasiner puis de restituer une information. L'unit
dinformation (bit, octet, etc.) sappelle point mmoire ou cellule.
- Ladresse fournie par le bus d'adresses est le mot binaire de p bits qui permet de localiser la
donne ;
- La donne de n bits entre (criture) et sort (lecture) par le bus de donnes qui est
bidirectionnel : deux sens possibles, en liaison avec le signal R/W ;
- La mmoire peut stocker 2p donnes de n bits chacune ;
- Le signal CS permet la slection du circuit ou le mettre en haute impdance ; cette possibilit
permet, comme on le verra, l'extension de la capacit mmoire d'un systme.
On peut donc utiliser une mmoire soit en :
- lecture :
Appliquer le mot adresse sur le bus dadresse ;
Slectionner le botier mmoire en appliquant un niveau logique bas sur la ligne CS ;
Slectionner le mode lecture en appliquant un niveau logique haut sur la ligne R/W ;
- criture :
Appliquer le mot dadresse sur le bus dadresse ;
Le mot de donne sur le bus de donnes ;
Slectionner le botier mmoire en appliquant un niveau logique bas sur la ligne CS ;
Slectionner le mode criture en appliquant un niveau logique bas sur la ligne R/W ;
4.2. Caractristiques des mmoires :
- La capacit : cest la quantit dinformation qui peut tre stocke dans la mmoire. Elle
sexprime en bits ou en mots de n bits. Par exemple :
64b, 4Kb, 8Ko (o : octet ou byte ) avec 1o = 8b ; 1K = 2
10
= 1024 ; 1M = 2
20
= 1048576
- Lorganisation : elle dfinit le nombre de mots et la longueur de chaque mot. Par exemple :
Une mmoire de 64Kx 1 est constitue de 65536 mots de 1 bit. Sa capacit est donc de 64Kb (8Ko) ;
Une mmoire de 8Kx8 contient 8192 mots de 8 bits. Sa capacit est de 64Kb (8Ko) ;
- Le temps daccs : cest le temps qui scoule entre une demande dinformation et le moment
o elle est effectivement disponible.
4.3. Les diffrents types de mmoires
Les mmoires sont classes suivant deux familles :
- Mmoires mortes (ROM pour Read Only Memory) : mmoire lecture seule;
- Mmoires vives (RAM pour Random Access Memory) : mmoire lecture et criture.
MEMOIRE
2
p
donnes de n bits
p n
Bus dadresse
Bus de donnes
bidirectionnel
CS
Chip Select
R/W
Read/Write
Fig. 19: Schma fonctionnel d'une mmoire
Chapi t re 6 - La l ogi que squent i el l e
113
4.3.1. Les mmoires mortes :
Les ROM sont utilises pour stocker des informations figes telles que des programmes fixes dans
des machines programmes ou les tables de conversion de donnes.
Le contenu est fix la construction ou par lutilisateur et la disparition de lalimentation
lectrique naltre pas le contenu.
4.3.2. Les mmoires vives
Ds quun systme doit conserver temporairement des informations, la RAM trouve sa place. En
informatique, elles sont largement mises en oeuvre en quantits importantes (plus de 16 Mo en
microinformatique et plusieurs centaines de mga octets en miniinformatique).
4.3.3. Les mmoires programmables et effaables par lutilisateur
Les mmoires programmables sont intermdiaires entre les RAM et les ROM. Leur contenu peut tre
dfini par lutilisateur et subsister sans alimentation lectrique.
On en rencontre de diffrentes familles :
Les PROM (Programmable ROM) : sont composes de fusibles que lon peut dtruire une
seule fois ;
Les EPROM (Erasable PROM) : ce sont des mmoires effaables par ultraviolet et
programmables lectriquement ;
Les EEPROM (Electrical Erasable PROM) : ce sont des mmoires effaables et
programmables lectriquement .
4.4. Extension de capacit :
Il est courant dans un systme microinformatique de grouper plusieurs circuits pour augmenter la
capacit (nombre des mots et/ou longueur des mots). Par exemple, laide de 4 botiers mmoires de
1Kx4bits, on peut raliser les mmoires suivantes : 1Kx16bits, 4Kx4bits, 2Kx8bits.
Le schma de la figure 20 ralise une mmoire de 1Kx16bits partir d'une mmoire lmentaire de
1Kx4bits :
- Ncessit de 4 botiers ;
- Ncessit de 10 bits dadresses A
0
A
9
; (nombre de mots = 2
nombre de bits dadresse
)
- Ncessit de 16 bits de donnes D
0
D
15
;
CS
R/W
A0..A9
D0..D3
CS
R/W
A0..A9
D0..D3
CS
R/W
A0..A9
D0..D3
CS
R/W
A0..A9
D0..D3
AB
DB
CS
R/W
D0..D3 D4..D7 D8..D11 D12..D15
A0..A9
D0..D15
Fig. 20: Extension de format d'une mmoire
Fonct i on - Trai ter
114
E X E R C I C E S R E S O L U S
EXERCICE N1 :
Lorsquun circuit actif sur un front est
attaqu par un interrupteur directement, les
rebondissements de ce dernier provoque
plusieurs front dune dure approximative de
20 ms ; ce phnomne cause un
dysfonctionnement du circuit command. La
solution ce problme est un circuit anti-
rebond quon peut raliser de plusieurs
faons ; ici on tudie la ralisation base
dune bascule SR. Analyser alors le
fonctionnement dun tel circuit.
EXERCICE N2 :
On dsire raliser un compteur asynchrone modulo 13 base du circuit intgr 74LS76 :
2.1.Combien de circuits intgrs 74LS76 doit-on utiliser ?
2.2.Proposer alors un schma pour la ralisation d'un tel compteur en prvoyant un signal INIT
pour l'initialisation du compteur ?
EXERCICE N3 : Etude du compteur binaire 74LS93
3.1.De quel type de compteur s'agit-t il ?
3.2.Montrer comment raccorder les bornes du compteur binaire 74LS93 pour obtenir un compteur
modulo 16 ?
3.3.Soit le montage suivant permettant de raliser un compteur modulo 60 ou diviseur de frquence
par 60 :
Expliquez le fonctionnement du montage en commenant par indiquer le modulo de chaque
compteur 74LS93 ?
EXERCICE N4 : Etude du registre dcalage universel 74LS194
On dsire utiliser le registre dcalage universel 74LS194 pour un chargement parallle des donnes et
une lecture srie de ces donnes avec dcalage vers la droite :
4.1.Remplir le tableau de fonctionnement ci-dessous pour permettre un chargement parallle du
mot binaire 1011 dans le registre 74LS194 ?
4.2.En supposant que le chargement du mot binaire a t effectu, donnez le cblage du 74LS194 pour raliser
un dcalage rotatif de la gauche vers la droite ?
ENTREES SORTIES
Mode Parallle
Clear
S1 S0
Clock
D C B A
Q
D
Q
C
Q
B
Q
A
20 ms
Vers circuit command
S
R
K
R R
V
cc
Vers circuit command
Chapi t re 6 - La l ogi que squent i el l e
115
CORRIGES :
EXERCICE N1 :
* Au repos, linterrupteur K est en position 1, S = 0 et R = 1, alors Q = 1 ;
* Si on passe la position 2, S = 1 et R = 0, alors Q = 0 ;
* Mais linterrupteur rebond entre cette position et la position intermdiaire :
o S = 1 et R =1, ce qui correspond ltat de mmoire de la bascule SR (Q = 0) ;
* De mme, si on revient la position 1 ; A la sortie, on na pas de rebondissemets.
EXERCICE N2 :
1.1. On aura besoin de 4 bascules JK donc de 2 circuits 74LS76.
1.2.
EXERCICE N3 :
3.1.C'est un compteur asynchrone binaire 4 bits.
3.2.
3.3.Le 1
er
compteur 74LS93 est un modulo 10 tandis que le 2
me
est un modulo 6. Les deux
compteurs sont monts en cascade puisque la dernire sortie de 1
er
compteur attaque
l'horloge du deuxime.
EXERCICE N4 :
4.1.
4.2.
ENTREES SORTIES
Mode Parallle
Clear
S1 S0 D C B A
Q
D
Q
C
Q
B
Q
A
1
1
1 1 0 1 1 1 0 1 1
Horloge
1 1 1
Q0 Q1 Q2 Q3
1
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
J
Q
Q
K
SET
CLR
Init
74LS93
Q
A
Q
D
Q
C
Q
B
CK
A
CK
B
R0
1
R0
2
Horloge
74LS194
Q
0
Q
3
Q
2
Q
1
D
SL
CP
S0
S1
Horloge
D
SR
MR
5V
Fonct i on - Trai ter
116
E X E R C I C E N O N R E S O L U
Le montage propos permet un asservissement de position pour un positionneur d'antenne parabolique :
Le montage suivant reprsente une solution cble pour la chane d'information du systme "Positionneur
d'antenne parabolique". Le fonctionnement d'une telle structure est comme suit :
- La position dsire (consigne) est fournie par une roue codeuse ;
- Quand le moteur tourne vers le "West" ou vers l'"East", le capteur ILS se fermant et s'ouvrant
rgulirement, donne des impulsions au compteur (le 4060 et le 4029) qui compte ces dernires ; de
ce fait, on dtecte la position de l'antenne ;
- Le comparateur (le 7485) compare la consigne la position relle et en fonction du rsultat fait
tourner le moteur vers le "W" ou vers le "E" ou l'arrte.
1. Pour les 2 sens de rotation du moteur, donner la fonction du compteur 4029 (comptage ou dcomptage),
l'tat des 2 relais ainsi que le schma correspondant la commande du moteur.
2. 16 impulsions du capteur ILS correspondent approximativement un dplacement de 0.1 mm, de la tige du
vrin lectrique (moteur + systme vis-crou). Quel est le rle du compteur 4060 ?
3. Le relais est un circuit selfique. Qu'est ce qui manque alors dans ce circuit de commande ?
C1
R1
4060
Q4
Q5
Q6
R
CK
4029
Q7
P
Cin
Bin/Dec
U/D Q4 Q3 Q2 Q1
B3 B2 B1 B0
A3 A2 A1 A0
A<B
A=B
A>B
A<B
A=B
A>B
7485
5V
5V
M
12V
5V
Roue Codeuse
B
A
Entre
Capteur ILS
5V
R2
Chapi t re 7 - Fami l l e l ogi que TTL st CMOS
117
CHAPITRE 7
FAMILLES LOGIQUES TTL ET CMOS
1. NOTION DE FAMILLE DE CIRCUIT LOGIQUE
Un circuit logique se prsente sous forme de circuit intgr qui permet de regrouper dans un mme
botier un maximum de composants lectroniques dont le plus important est le transistor.
Les circuits intgrs logiques sont classs suivant leur technologie de fabrication en plusieurs familles
logiques. Chaque famille logique a pour point commun la technologie employe.
Dans ce chapitre, on tudiera les familles les plus populaires actuellement, savoir :
- La famille TTL (Transistor Transistor Logic) : utilise une technologie base de transistors
bipolaires ;
- La famille CMOS (Complementary Metal Oxide Semiconductor) : utilise une technologie a base
de transistor MOS.
Chaque famille logique est caractrise par des paramtres lectriques comme lalimentation et la
consommation, et des performances dynamiques comme le temps de propagation.
2. LES VARIANTES TECHNOLOGIQUES DES FAMILLES LOGIQUES TTL ET CMOS
2.1. Les variantes technologiques de la famille TTL :
- La srie TTL standard : Srie standard qui est peu rapide avec une consommation leve ;
- La srie TTL L : Srie faible consommation (Low Power) mais au dtriment de la rapidit ;
- La srie TTL H: Srie rapide (High speed) mais au dtriment de la consommation ;
- La srie TTL S : Srie Schottky qui est 2 fois plus rapide que la srie H pour la mme
consommation ;
- La srie TTL LS : Srie qui constitue un compromis entre la srie TTL L et la srie TTL S ;
- Les sries TTL AS (Advanced Schottky), ALS (Advanced Low power Schottky) :
Sries drives des technologies prsentes prcdemment. Les technologies avances de
TTL mettent en oeuvre les progrs rcent en matire de circuits intgrs bipolaires.
2.2. Les variantes technologiques de la famille CMOS :
- La srie 4000 : Srie classique de base.
- Les sries AC et ACT : La srie AC (Advanced Cmos) est lvolution de la srie de base. Le suffixe
T indique la compatibilit des entres et sorties avec les sries TTL.
- Sries HC, HCT, AHC et AHCT : Les sries disposant du suffixe H (High speed) sont fondes sur la
technologie CMOS rapide. Elles existent dans les diffrentes dclinaisons suivant
quelles sont avances (A), compatibles TTL (T) ou combinant ces
caractristiques.
Fig. 1 : Exemple de circuit logique intgr
Fonct i on - Trai ter
118
3. LA STRUCTURE DE BASE DES FAMILLES LOGIQUES TTL ET CMOS
3.1. La structure TTL :
Le montage de la figure 1 est la structure de base dune porte NAND TTL base de transistors
bipolaires ; l'analyse suivante montrera qu'il s'agit bien d'une porte "NAND".
- Lorsque les deux entres a et b sont au niveau
haut (5V), le transistor T1 est bloqu et le
transistor T2 est satur ce qui bloque T3 et
sature T4 ; S est alors au niveau logique bas (0V)
si la porte est charge normalement (par
exemple par une autre porte TTL);
- Si lune des entres ou les deux entres sont au
niveau bas (0V), le transistor T1 est conducteur,
ce qui bloque T2 et T4 ; T3 peut alors conduire
et assure la sortie S un niveau logique haut
(voisin de 5V) si la porte est charge
normalement (par exemple par une autre porte
TTL) ;
3.2. Structure CMOS :
Le montage de la figure 2 reprsente la structure de base dune porte INVERSEUSE CMOS base de
deux transistors MOS complmentaires :
- Si on applique un niveau bas lentre, le transistor
T2 (MOS N) est bloqu car sa tension grille est nulle.
Par contre le transistor T1 (MOS P) est conducteur
car sa tension grille source est gale -5V : le sortie
S est au niveau logique 1 ;
- Si on applique un niveau haut lentre, le transistor
T1 est bloqu car sa tension grille source est nulle.
Le transistor T2 est conducteur car sa tension grille
source est gale 5V : la sortie S est au niveau
logique 0 ;
- Lensemble ralise une porte inverseuse.
4. LES PARAMETRES ELECTRIQUES DES CIRCUITS LOGIQUES
4.1. Tension dalimentation :
- Famille logique TTL : Lalimentation doit tre fixe et gale 5V avec une tolrance de 5%.
- Famille logique CMOS : Le choix de la tension dalimentation est plus large de 3V 18V.
4.2. Les niveaux logiques :
Pour une famille donne, les niveaux logiques 0 ou "L" (Low) et 1 ou "H" (High) ne
correspondent pas une tension prcise, mais une certaine plage de tension.
Fig. 2 : Structure de base d'une porte CMOS
Vdd
a S
T1
T2
Fig. 1 : Structure de base d'une porte NAND TTL
A
B
S
5V
R1 R2
T1
T2
R4
T3
T4
R3
Chapi t re 7 - Fami l l e l ogi que TTL st CMOS
119
La terminologie utilise pour les valeurs de la tension en entre (Input):
- VIHmin : Tension minimale en entre qui assure le niveau logique haut.
- VILmax : Tension maximale en entre qui assure le niveau logique bas.
La terminologie utilise pour les valeurs de la tension de sortie (Output) :
- VOHmin : Tension minimale de sortie ltat logique haut.
- V0Lmax : Tension maximale de sortie ltat logique bas.
4.4. Consommation des circuits logiques
La consommation d'un circuit logique est la puissance demande par son botier au circuit
d'alimentation. Elle doit tre la plus faible possible et elle est ncessaire pour dimensionner
lalimentation des circuits logiques.
Le constructeur indique une puissance consomme moyenne lie aux niveaux de sortie des circuits
logiques. Ainsi pour un oprateur NAND TTL, elle est de 50mW
5. LES PERFORMANCES DYNAMIQUES DES CIRCUITS LOGIQUES
Dans une porte logique, les grandeurs sont transmises avec un retard caractristique de la porte : cest
le temps de propagation de linformation dans la porte. On distingue alors la transition hautbas (front
descendant) ou bashaut (front montant) :
- TpHL : temps de propagation du signal
logique lorsque la sortie passe de
ltat haut ltat bas (Propagation
Time High to Low).
- TpLH : temps de propagation du signal
logique lorsque la sortie passe de
ltat bas ltat haut (Propagation
Time Low to High).
Pour assurer la mesure de ces dures, une
rfrence de tension est fixe par les constructeurs
(1,3 V en TTL) pour le dbut et la fin de la
propagation comme le montre la figure 5 :
Fig. 3 : Niveaux logiques d'entres
En TTL :
V
IHmin
= 2 V V
ILmax
= 0,8 V
En CMOS : (3V Vcc 18V)
V
IHmin
= 0,55.Vcc V
ILmax
= 0,45.Vcc
C
(Etat indfini)
Vcc
V
IHmin
V
ILmax
0 V
0
1
En TTL :
V
OHmin
= 2,4 V V
OLmax
= 0,4 V
En CMOS : (3V Vcc 18V)
V
OHmin
= 0,95.Vcc V
OLmax
= 0,05.Vcc
Fig. 4 : Niveaux logiques de sorties
C
(Etat indfini)
Vcc
V
OHmin
V
OLmax
0 V
0
1
VIN
VOUT
VIN VOUT
t
t
TpHL TpLH
1,3V
1,3V
Fig. 5 : Illustration du temps de propagation
Fonct i on - Trai ter
120
6. PERFORMANCES COMPAREES DES DIFFERENTES FAMILLES TTL ET CMOS
TTL TTL-LS C-MOS NC-MOS
Temps de propagation tpd (ns) 10 10 40 10
Tension d'alimentation (V) +5V 5% +5V 5% +3V +15V +3V +15V
Puissance consomme Pc (mW) 10 2 0,3 0,3
Frquence maximale (MHz) 30 30 10 30
Nombres dentres recommandes 10 20 50 mini 50 mini
7. LES DIFFERENTS ETAGES DE SORTIE
7.1. Etage de sortie Totem pole :
Ltage de sortie, appel totem pole ajoute un
tage transistors pour amliorer les
commutations de la sortie et la stabilit des
niveaux logiques.
La figure 6 montre la structure dune porte
NAND avec sortie totem pole :
7.2. Etage de sortie collecteur ou drain ouvert :
Ltage de sortie collecteur
ouvert ou drain ouvert est utilis
lorsque la charge ncessite une tension
dalimentation que ne peut lui fournir
la porte logique. Dans cette
configuration, la sortie est le
collecteur ou le drain du dernier
transistor dont il faut terminer la
polarisation. Ce type de sortie est
identifi par le signe montr la figure
suivante qui reprsente une porte
NAND sortie collecteur ouvert :
7.3. Etage de sortie trois tats :
Dans certaines applications, il savre ncessaire de dconnecter lectriquement la sortie dune
porte logique pour lisoler du montage. Il faut donc que la sortie soit comme un circuit ouvert vis vis
du reste du montage. Un nouvel tat apparat en supplment du niveau haut et du bas : ltat de haute
impdance (HiZ) o limpdance ou la rsistance de sortie devient trs grande, voire infinie.
Pour mettre en oeuvre une telle porte, il faut une entre supplmentaire slectionnant ltat haute
impdance ou troisime tat.
La figure 8 montre le symbole dun oprateur OUI 3 tats avec sa table de vrit :
a
b
S
5V
R1
R
T1
T2
Rsistance de
polarisation
Fig. 7 : Porte NAND TTL avec sortie collecteur ouvert
Fig. 6 : Structure de base d'une porte NAND TTL
a
b
S
5 V
R1 R2
T1
T2
R4
T3
T4
R3
Chapi t re 7 - Fami l l e l ogi que TTL st CMOS
121
8. INTERFACAGE DES CIRCUITS LOGIQUES
8.1. Interface CMOS/TTL et TTL/CMOS (Figure 9) :
- Une sortie CMOS peut commander sans problme une
entre TTL ;
- Par contre, une sortie TTL dlivre une tension VOH trs
proche de VIH(min) de lentre CMOS. La solution la
plus utilise pour assurer la compatibilit consiste
utiliser une rsistance de rappel la source Rp comprise
entre 1K 10K.
8.2. Commande dune entre logique TTL par un contact :
Souvent, lentre dun circuit logique TTL change dtat en fonction de ltat dun contact
(interrupteur, contact d'un capteur TOR, etc.). Dans ce cas, il faut prvoir un interfaage pour assurer
le bon fonctionnement comme le montre les figures 10 et 11 :
V
I
R1
5V
Sans la rsistance R1, la fermeture du contact provoque un court-
circuit de l'alimentation 5V. La rsistance R1 rsout ce problme :
- Au repos, le contact est ouvert, R1 assure le '1' logique
sur l'entre de la porte logique ; R1 est typiquement de 10k
;
- lorsque le contact est ferm, l'entre logique est au
niveau "0" et l'alimentation n'est pas court-circuite.
Fig. 10 : Contact commandant un niveau bas
- Au repos, le contact est ouvert, R1 assure le
'0' logique sur l'entre de la porte logique ; R1 est
typiquement de 1k ;
- lorsque le contact est ferm, l'entre logique est au
niveau "1" et l'alimentation n'est pas court-circuite.
Fig. 11 : Contact commandant un niveau haut
V
I
R2
5V
5V
Rp
Fig. 9 : Interfaage entre TTL et CMOS
CMOS
TTL
Enable
(Contrle)
a S
Contrle Entre Sortie
Enable a S
1 0 0
1 1 1
0 X HiZ
Fig. 8 : Porte OUI 3 tats
Fonct i on - Trai ter
122
E X E R C I C E S R E S O L U S
EXERCICE N1:
1.1- Donner le schma d'une porte NAND 4 entres.
1.2- Peut-on gnraliser le principe sur n entrs ?
EXERCICE N2:
Soit le montage ci-contre, d'une porte logique. Analyser le
montage et en dduire le rle de l'entre OE (Output Enable)
et le rle de la porte ?
CORRIGES :
EXERCICE N1 :
1.1- C'est le mme schma que pour le schma de base, mais avec un transistor 4 metteurs..
1.2- Oui.
EXERCICE N2 :
Si OE=0 (0V), D2 conduit, ce qui fait conduire T1 bloquant par consquence T2 et T4. La conduction
de D2 bloque T3 et D1. En conclusion, l'tage TOTEM POLE est bloqu, ce qui met la sortie de la porte
en haute impdance.
Si OE= (5V), D2 est bloqu ; elle n'a aucune influence sur le montage. Par analyse simple, on trouve
que la porte est inverseuse (S = E ). En conclusion, c'est une porte inverseuse Tri-State.
E X E R C I C E N O N R E S O L U
La sortie dune porte logique ltat haut est quivalente un diple actif, comme il est modlis dans
la figure ci-dessous :
On se propose dtudier sa caractristique courant-tension VOH = f(IOH). Le relev dune telle
caractristique est donn la figure ci aprs :
Donner les caractristiques (E,r) de ce diple, en considrant la caractristique linaire
E
OE
S
5V
R1 R2
T1
T2
R4
T3
T4
R3
D1
D2
IOH
E
E
r
VOH
IOH S
0v
0v
0v
5v (Alimentation de la porte)
VOH
Lentre est
ltat bas
IOH
V
E
0v
0v
5v
VOH
IOH
A
Rch
IOH(mA)
VOH(V
)
3.8
V
25mA
Caractristique linarise
Caractristique Relle
0
Chapi t re 8 - Tempori sateurs base de ci rcui ts i nt grs
123
CHAPITRE 8
TEMPORISATEURS A BASE DE CIRCUITS INTEGREES
INTRODUCTION
Dans les systmes numriques, on a souvent besoin q'une action soit effectue pendant une dure
dtermine ; on parle de temporisation. Aussi, on a besoin d'un signal priodique qui synchronise ou
cadence les oprations d'un systmes squentiel ; on parle de base de temps ou d'horloge (Clock).
1. LE CIRCUIT DE BASE : LE CIRCUIT RC
A la base de pas mal de systmes de temporisation, on trouve un circuit base d'une rsistance R et
d'un condensateur C (circuit RC). Ci -dessous, on tudie les aspects de base de ce circuit.
On dmontre que pour atteindre une certaine valeur VcX, il faut un certain temps tX, tel que :
Vc
t
0.63E
0
t=RC
E
Dans un circuit RC, avec C dcharg
(Vc=0V), aliment par une tension continue
Vcc, la tension Vc aux bornes de C
augmente ; on dit que C se charge. La loi de
variation de Vc est de la forme :
Vc = E(1-e
-t/RC
)
- Pour t=0 Vc=0V ;
- Pour t VcE ;
- Pour t=t Vc=0.63E.
R
C
E
Vc
Dans un circuit RC, avec C dj charg
(Vc=Vc
0
), la tension aux bornes de C
diminue ; on dit que C se dcharge. la loi
de variation de Vc est de la forme :
Vc = Vc
0
(e
-t/RC
)
- Pour t=0 Vc=Vc0 ;
- Pour t Vc0 ;
- Pour t=t Vc=0.33Vc0.
Vc
Vc
Vc
0
t
0.33E
0
t=RC
R
C
Vc
E
t
0
t
X
Variation restante
)]
tan _
_
[ln(
te res Variation
totale Varaition
RC tX=
o :
- ln est le logarithme nprien ;
- R est la valeur de la rsistance ;
- C est la capacit du condensateur.
)] [ln(
X
X
Vc E
E
RC t
=
VcX
Fonct i on - Trai ter
124
2. PRINCIPE DE BASE :
Il correspond au schma ci-contre. Son fonctionnement est comme suit :
-
Initialement, le condensateur C est dcharg et la
tension de sortie Vs du comparateur est au niveau bas
ce qui ouvere linterrupteur lectronique D ;
-
Le condensateur C se charge exponentiellement
travers la rsistance R ;
-
Vs reste ltat bas jusqu' ce que Vc atteigne la
tension de la rfrence Vref ;
-
Lorsque Vc atteint Vref, le comparateur bascule
ltat haut provoquant ainsi la fermeture de
l'interrupteur ;
-
Le condensateur C se dcharge rapidement travers
la rsistance de l'interrupteur qui est relativement
faible par rapport R.
Un tel principe est utilis rgulirement dans les systmes lectroniques ; une varit de circuits
intgrs le concrtisent (74121 en TTL, le 4047 en CMOS, NE555, etc.). Le plus clbre de ces circuits est
le fameux NE555, qui fera l'objet de l'tude suivante.
3. LE TEMPORISATEUR NE555 :
Introduit en 1972, le NE555 tait le premier
circuit intgr temporisateur qui reprsente une
sorte de standard en matire de fonctions de
temporisation, en particulier le circuit monostable
et le circuit astable. Comme l'indique son schma
interne, il est consistitu de :
- 2 comparateurs dont les seuils sont fixs par
le pont des 3 ristances R ;
- d'une bascule SR, avec une entre de forcage
0 (RESET) ;
- d'un transistor pour la dcharge de
condensateur externe.
4. MODES DE FONCTIONNEMENT DU NE555
Plusieurs fonctions peuvent tre ralises par ce circuit ; les plus importantes sont le Monostable qui
permet d'avoir des temporisations et l'Astable qui permet d'avoir des oscillations libres.
4.1. Le monostable
Le schma base du NE555 et son fonctionnement sont donns ci -aprs :
- On suppose qu'au dmarrage, le condensateur C est dcharg et la sortie Vs 0 ;
- L'entre Vt est au repos au niveau logique 1 ; alors les variables du montage sont positionnes
ainsi :
Le entres de la bascule (S=0) et (R=0) Etat mmoire de la bascule et Vs reste 0 ;
le transistor est satur ; c'est l'tat stable du monostable.
- Si Vt passe 0 pendant une dure trs courte par rapport la dure qu'on veut du monostable,
alors :
(S=1) et (R=0) la sortie Vs est 1 ;
le transistor est bloqu, ce qui permet au condensateur C de se charger travers R.
+
-
Vc
D
C
R
Vcc
S
Vref
Vs
Chapi t re 8 - Tempori sateurs base de ci rcui ts i nt grs
125
- Quand Vc, aprs un temps qui dpend de R et C, atteint 2/3 de E, on a :
(S=0) et (R=1) la sortie Vs est 0 ;
le transistor est satur ; on revient l'tat de repos.
- L'expression de la dure de temporisation T
W
est :
)]
3
2
[ln(
E
E
E
RC TW
= 3 ln RC TW =
RC TW 1 . 1 ~
4.2. L'astable
Il y a plusieurs variantes de cette fonction ; on va tudier la plus courante. Son schma et son
fonctionnement sont donns ci-aprs :
- On suppose qu'au dmarrage, le condensateur C est dcharg et la sortie Vs 1 ; alors les
variables du montage sont positionnes ainsi :
Le entres de la bascule (S=0) et (R=0) Etat mmoire de la bascule et Vs reste 1 ;
le transistor est bloqu, ce qui permet au condensateur C de se charger travers (R
A
+ R
B
).
- Quand Vc, aprs un temps qui dpend de (R
A
+ R
B
) et C, atteint 2/3 de E, on a :
(S=0) et (R=1) la sortie Vs est 0 ;
le transistor est satur ; ce qui permet au condensateur C de se dcharger travers la
rsistance R
B
. La tension Vc diminue alors.
- Quand Vc, aprs un temps qui dpend de R
B
et C, atteint 1/3 de E, on a :
(S=1) et (R=0) la sortie Vs est 1 ;
le transistor est bloqu ; le cycle recommence. Il s'agit bien d'un oscillateur.
- L'expression de la priode est T = T
L
+ T
H
, avec :
2 ln C R T B L= et
2 ln ) ( C R R T B A H + =
C R R T B A ) 2 ( 7 . 0 + ~
4 8
7 3
6
2 1
R
C
NE555
S
E
Vs
Vc
Vt
Vt
t
Vc
t
t
T
W
Vs
0
2/3 E
0
E
T
W
E
0
E
4 8
7 3
6
2 1
R
A
C
NE555
S
E
Vs
Vc
R
B
Vc
t
t
Vs
0
2/3 E
0
E
T
H
E
1/3 E
T
T
L
Etat transitoire
Fonct i on - Trai ter
126
E X E R C I C E S R E S O L U S
Le montage ci-dessous reprsente la partie commande dun essuie-glace, sachant que sa
partie oprative est principalement constitue autour dun moteur courant continu et dun
systme Bielle-manivelle. Analyser son fonctionnement, sachant que :
- Le NE555 (1) est un astable de (T=1ms) ;
- Le NE555 (2) est un astable de (T=7s) avec 2s de dure du niveau haut ;
- le capteur "cc" est un contact incorpor dans le moteur, qui est ferm tant que l'essuie-glace est
dans sa course normale de balayage (pas dans la position initiale de repos).
CORRIGE :
Le systme permet d'amliorer la visibilit d'un pare-brise. Il fonctionne de la faon suivante :
Si le commutateur K est en position 1, le moteur est aliment par 12V en permanence
(1ere vitesse) ;
Si le commutateur K est en position 2, le moteur est aliment par un signal priodique de
priode 1 ms par exemple, tantt 12 V, tantt 0 V, ce qui fait fonctionner le moteur
avec une tension moyenne infrieure de celle la position 1 ; par consquent, la vitesse de
balayage est plus petite (2eme vitesse) ;
Si le commutateur K est en position 3, le moteur est aliment par un signal, dont la dure
de l'tat 1 (12 V) est plus petite que celle de l'tat 0 (0V), ce qui donne comme rsultat :
lessuie-glace fait un aller retour (en 2s par exemple) et sarrte pendant un temps plus
grand (5s par exemple) ; et le cycle recommence ;
Si on passe de nimporte quelle position la position 4 (arrt), il risque que les balais ne
reviennent pas leur position initiale ; le capteur "cc" qui est ferm tant que l'essuie-
glace est en course, permet alors d'alimenter le moteur et par consquent faire revenir
les balais leur position de repos.
4 8
7 3
2
6 1
NE555
R1
C1
R2
1
4 8
7 3
6
2
6 1
NE555
R4
C2
R5
12 V
Batterie
D
R3
T1
M
2
3
K
4
CC
1
2
Chapi t re 9 - Ci rcui t s l ogi ques programmabl es
127
CHAPITRE 9
CIRCUITS LOGIQUES PROGRAMMABLES
INTRODUCTION :
Actuellement les systmes techniques utilisent de plus en plus de circuits numriques, qui impliquent
lutilisation dun nombre important de circuits intgrs logiques. Ceci a pour consquence, une mise en
oeuvre complexe, un circuit imprim de taille importante et un prix de revient lev. Le dveloppement
incessant de la technologie des mmoires lectroniques utilises en informatique a alors permis la
naissance des circuits logiques programmables (Programmable Logic Devices ou en abrg PLD ).
1. PRINCIPES ET TECHNIQUES DE BASE :
Un circuit programmable est un assemblage de circuits de base qui sont gnriques (oprateurs
logiques combinatoires, multiplexeurs, bascules, etc.). On trouve en particulier dans un PLD :
- des multiplexeurs permettant la cration de chemins entre ses diffrents composants ;
- des OU Exclusif permettant la complmentarit des fonctions ;
- des bascules gnralement de type D, permettant la mmorisation des fonctions ;
- et des rseaux logiques programmables qu'on dtaille ci-aprs.
Toute fonction logique combinatoire peut se mettre sous forme d'une somme (OU) de produits (ET).
Partant de ce principe, on en dduit une structure appele PLA (Programmable Logic Array). Elle est
constitue :
- D'un ensemble doprateurs ET (figure 1) sur lesquels viennent se connecter les variables
dentre et leurs complments ;
- D'un ensemble doprateurs OU (figure 2) sur lesquels les sorties des oprateurs ET sont
connectes.
a
a b
S
ET
Vcc
b
S
ET
a
b
S
ET
: Fusible Intact
Fig. 1 : Porte ET
0
Q
S
ET0
S
ET1
S
ET0
S
ET1
Q
0
S
ET1
S
ET0
Q
0
: Fusible Intact
Fig. 2 : Porte OU
Fonct i on - Trai ter
128
Lensemble des oprateurs forment des matrices (matrice OU et matrice ET). Les interconnexions de
ces matrices sont assures par des fusibles qui sont grills lors de la programmation. Lorsquun PLD est
vierge toutes les connexions sont assures (fusibles intacts).
La figure 3 reprsente la structure interne d'un PLA et la figure 4 contient la reprsentation simplifie
d'une telle structure :
Pour matrialiser les interconnexions :
- la technique des fusibles est en voie de disparition ; en effet, dans cette technique, on l'aura
compris, le PLD est programm un fois pour toutes ;
- Parmi les techniques utilises actuellement, on retient celle qui est la plus courante ; il s'agit
de la technique utilisant le transistor "MOS grille isole". Cette technique permet de
programmer et reprogrammer le PLD. Le circuit est donc effaable lectriquement. De point
de vue aspect physique, le fusible est tout simplement remplac par un transistor MOS grille
isole.
2. LA CLASSIFICATION DES PLD :
Il existe plusieurs familles de PLD qui sont diffrencies par leurs structures internes. Dans e tableau
suivant, on prsente 2 classes de base de ces familles :
TYPE Densit MATRICE ET MATRICE OU EFFAABLE
PAL (Programmbale Array Logic) 10 100 portes Programmable Fixe Non
GAL (Generic Array Logic) 10 100 Programmable Fixe Electriquement
3. LES PAL (Programmable Array Logic) :
3.1. Structure de base dun PAL :
Les PAL sont les premiers circuits programmables tre
utiliss et ont t dvelopps par le constructeur AMD il y
a une vingtaine dannes. Ils possdent une matrice ET
programmable et une matrice OU fixe ou fige.
Les PAL sont programms par destruction de fusibles et
ne sont donc programmables quune fois. La fusion des
fusibles est obtenue en appliquant leurs bornes, laide
dun programmateur adapt, une tension de 12 15 V
pendant 10 50 S.
Fig. 4 : Exemple de programmation d'un PAL
a b
Q1 Q0
: Fusible intact
: Liaison fige
Fig. 3 : Structure interne d'un PLA 2 entres et 1 sortie
F1
F8
I1 I1 I2 I2
Q
I1
I2
Fig. 4 : Reprsentation conventionnelle d'un PLA
I1 I1 I2 I2
: Fusible Intact
I1
I2
Q
Chapi t re 9 - Ci rcui t s l ogi ques programmabl es
129
Soit programmer les fonctions suivantes :
et
On grillera des fusibles de faon obtenir le schma de la figure 4 ci -contre, o seuls les
fusibles intacts qui sont reprsents ; les autres grills ou sauts ne sont pas reprsents.
3.2. Les diffrents types de sortie dun PAL :
3.2.1. Structure de sorties combinatoires :
Ces sorties 3 tats sont reboucles vers la matrice de fusibles. En mode haute impdance, on peut
utiliser une broche de sortie comme tant une variable dentre intermdiaire :
3.2.2. Structure de sortie squentielle :
Ces sorties utilisent des bascules D dont les sorties sont de type trois tats. Elles sont contrles par
un signal de validation OE (Output Enable) et une horloge commune toutes les bascules :
3.2.3. Rfrence des PAL (Daprs AMD) :
Les constructeurs ont dfini une nomenclature permettant de dcoder facilement la rfrence des
PAL :
b a b a Q . . 0 + =
Type de botier
Vitesse
Consommation
Nombre de sorties
Structure de sortie
Nombre dentres
CE pour version CMOS
PAL (CE) XX AB YY C ZZ EF
I
I/O
I
Out
Q
Q
SET
CLR
D
Horloge OE
Type de botier : DIL plastique civile
Vitesse : 15 nS
Consommation : puissances
Nombre de sorties : 8
Sortie : Combinatoire active Bas
Nombre dentres : 16
Nous allons voir le PAL 16 L 8 H 15 PC
b a b a Q . . 0 + =
Fonct i on - Trai ter
130
4. LES GAL (GENERIC ARRAY LOGIC) :
L'inconvnient majeur d'un PAL est qu'il ne peut tre programm qu'une seule fois, ce qui impose un
"gaspillage" lors du dveloppement. On a donc pens remplacer les fusibles par des transistors MOS
pouvant tre rgnrs, d'o le terme "Generic Array Logic"(Rseau logique programmable). GAL est
marque dpose de LATTICE.
Les GAL sont donc des PAL effaables, avec en plus macro-cellules de sortie programmables, ce qui le
rend versatile. La partie nomme OLMC (OUTPUT LOGIC MACROCELL) est versatile, ce qui veut dire qu'il
est possible par programmation de choisir entre une configuration de sortie combinatoire ou squentielle.
La figure 7 montre la structure et la table de fonctionnement d'une OLMC :
- Le multiplexeur 4 vers 1 permet de mettre en circuit ou non la bascule D, en inversant ou non les
signaux ;
- Le multiplexeur 2 vers 1 permet de rinjecter soit la sortie, soit l'entre du buffer de sortie vers le
rseau programmable.
5. PROGRAMMATION DES PLD
La programmation des PLD ncessite :
- Le logiciel de dveloppement permettant de simplifier les quations et de gnrer un fichier
JEDEC partir des donnes rentres par loprateur. Le fichier JEDEC tant un ensemble de
donnes binaires indiquant au programmateur les fusibles "griller" ;
- Un programmateur permettant de "griller" les fusibles du PLD en fonction des donnes du fichier
JEDEC. Il est en gnral associ un logiciel de pilotage. Les programmateurs utiliss sont en
gnral les mmes que ceux permettant la programmation des EPROM.
Fig. 7 : Structure et table de fonctionnement d'une OLMC
Chapi t re 9 - Ci rcui t s l ogi ques programmabl es
131
E X E R C I C E S R E S O L U S
Donner pour chaque combinaison de S1S0 de la macro-cellule d'un GAL, le schma quivalent.
CORRIGE :
EXERCICE N 1 :
Fonct i on - Trai ter
132
CHAPITRE 10
LE GRAFCET
INTRODUCTION :
La reprsentation graphique permet de dcrire le fonctionnement squentiel d'un systme automatis
sans ambigut et d'une faon comprhensible par toutes les catgories de personnel : de l'ingnieur au
technico-commercial. En effet, l'il humain est capable de saisir, d'un regard, une volution squentielle
reprsente graphiquement. Parmi les mthodes possibles, on trouve l'organigramme et le GRAFCET qui
est l' objet d'tude de ce chapitre. Le GRAFCET provient de GRAphe Fonctionnel de Commande par Etapes
et Transitions. Il est normalis sur le plan international, depuis 1988 sous le nom de "Sequential Function
Chart (SFC)" (norme CEI 848). Pour illustrer les notions traites dans ce chapitre, on se basera sur le
systme de perage automatis, dcrit ci-dessous :
1. TYPES DE GRAFCET :
Suivant les diffrents points de vue (utilisateur, technico-commercial, concepteur-ralisateur, etc.),
on peut distinguer plusieurs types de GRAFCET. Pour simplifier, on les rsume dans 2 types :
GRAFCET niveau 1 ;
GRAFCET niveau 2.
1.1- GRAFCET niveau 1 :
Dans ce type de GRAFCET, apparaissent les actions
raliser et les informations ncessaires leur excution. Ce
modle est purement descriptif. Le choix des actionneurs et
des capteurs nest pas encore fait. On le dsigne aussi par
"GRAFCET point de vue systme" ou "GRAFCET fonctionnel".
1.2- GRAFCET niveau 2 :
Une tude dtaille conduit au choix des solutions
technologiques pour la partie oprative (PO) et la partie
commande (PC). On le dsigne aussi par "GRAFCET point de
vue PO et PC".
Dcy
ps
pp
pd
VS
fr
VM
MF
Fig1. Perceuse automatise
- L'appui sur le bouton Dpart cycle (Dcy) lance le cycle ;
- Le vrin de serrage (VS) dplace la pice pour la serrer ;
le capteur (ps) indique que la pice est serre ;
- Le moteur supportant le fort (MF) commence tourner
et le vrin (VM) pousse le moteur vers le bas ;
- Le perage de la pice commence et le capteur (pp)
indique que la pice est perce ;
- Alors le vrin VM remonte ; quand le capteur (fr) est
actionn, cela indique que le fort est retourn ;
- Le moteur MF et le vrin VM sont arrts ;
- Le vrin VS retourne dans l'autre sens ; le capteur (pd)
indique que la pice est desserre :
- On revient alors l'tat initial.
Note : Pour la clart, les noms des capteurs sont en
minuscule et ceux des actionneurs sont en majuscule.
Fig2. Fonctionnement du systme
Fig3. GRAFCET niveau 1
Chapi t re 10 - Le GRAFCET
133
2. ELEMENTS DE BASE :
Le GRAFCET se compose d'un ensemble :
- D'tapes auxquelles sont associes des actions ;
- De transitions auxquelles sont associes des rceptivits ;
- De liaisons orientes reliant les tapes aux transitions et les transitions aux tapes.
2.1- Etape :
2.1.1- Dfinition :
Une tape caractrise un tat qui est un
comportement invariant d'une partie ou de
la totalit de la partie commande. C'est une
situation dans laquelle les variables
d'entre et de sortie de la partie commande
conservent leur tat. Une variable d'tape
est associe chaque tape (en gnral
repr par Xi, ou i est l'identificateur de
l'tape). Cette variable boolenne a pour
valeur logique :
- "1" lorsque l'tape associe est active.
Par exemple pour l'tape 0, X0 = 1 ;
- "0" logique lorsque celle-ci est
inactive. Par exemple pour l'tape 0,
X0 = 0.
2.1.2- Actions associes une tape :
Une ou plusieurs actions peuvent tre associes une tape. Elles traduisent ce qui doit tre fait
chaque fois que l'tape laquelle elles sont associes est active. On symbolise les actions par un
rectangle reli au symbole de l'tape. Elles peuvent tre :
- Externes correspondant aux ordres vers la PO ;
Exemple : Serrer la pice.
- Internes correspondant des fonctions qui n'agissent pas sur la PO, telles qu'une
temporisation, un comptage, etc.
Exemple : Lancer une temporisation de 5 s.
2.2- Les transitions :
2.2.1- Dfinition :
Un systme lors de son fonctionnement squentiel change dtat. Une
transition indique la possibilit d'volution entre tapes :
- Elle est symbolise par une barre perpendiculaire aux
liaisons orientes ;
- Elle dfinit la condition d'volution entre tapes, appele
rceptivit.
Une transition est valide si l'tape ou les tapes prcdentes sont actives.
Fig7. Exemples d'actions associes une tape
Fig8. Transition
Une tape est symbolise par un carr
repr numriquement ; ici, c'est
l'tape 1.
Fig4. Symbole d'une tape
Si elle est symbolise par un carr cts
doubls, il s'agit alors d'une l'tape
initiale, par laquelle le systme dmarre.
Fig5. Etape initiale
S'il est ncessaire de prciser un
instant donn une tape i active, un
point est plac comme ci-contre.
Fig6. Etape active
Fonct i on - Trai ter
134
2.2.2- Rceptivit associe une transition :
a. Dfinition :
A chaque transition est associe une condition
logique appele rceptivit ou condition de
franchissement d'tape. La rceptivit est une
fonction combinatoire d'informations
boolennes telles que l'tat :
- d'un capteur ;
- d'un bouton de l'Interface Homme/Machine ;
- d'une temporisation ;
- d'une tape, etc.
Pour franchir une tape, il faut que :
- la transition soit valide ;
- ET la rceptivit soit vraie.
b. Cas particuliers :
Il y a des cas particuliers de rceptivit, on en cite 2 :
- Temporisation : Pour faire intervenir le temps dans une rceptivit, il suffit d'indiquer aprs
le repre "t" son origine et sa dure. L'origine sera l'instant de dbut de l'activation de l'tape
dclenchant la temporisation. La notation t/14/5 signifie que la rceptivit sera vraie 5
secondes aprs l'activation de l'tape repre 14. La notation normalise s'crit 5s/X14.
- Rceptivit toujours vraie : une telle rceptivit s'crit "= 1". Le franchissement de cette
transition se fera ds que la ou les tapes immdiatement antrieures seront actives sans
autre condition.
3. LES REGLES D'EVOLUTION D'UN GRAFCET :
Rgles N 1 : Situation initiale
L'initialisation prcise l'tape ou les tapes actives au dbut du fonctionnement. Elle caractrise le
comportement initial de la partie commande vis--vis de la partie oprative. Les tapes initiales
sont actives inconditionnellement en dbut de cycle.
Rgles N 2 : Franchissement d'une transition
Une transition est valide lorsque toutes les tapes immdiatement prcdentes sont actives. Elle
ne peut alors tre franchie que :
- Lorsqu'elle est valide ;
- ET que la rceptivit associe la transition est vraie.
Rgles N 3 : Evolution des tapes actives
Le franchissement d'une transition entrane l'activation simultane de toutes les tapes
immdiatement suivantes et la dsactivation de toutes les tapes immdiatement prcdentes.
Pour voluer de l'tape 4 l'tape 5, il
faut que vrifier l'quation logique :
X4.a0.c3
X4 reprsente l'tat de l'tape 4.
Pour voluer de l'tape 0 l'tape 1, il
faut que vrifier l'quation logique :
X0.Dcy.
X0 reprsente l'tat de l'tape 0.
Fig9. Exemples de rceptivits
Le passage de l'tape 4 l'tape 5
est toujours vrai
Fig10. Rceptivit toujours vraie Fig11. Temporisation
Chapi t re 10 - Le GRAFCET
135
4. STRUCTURES DE BASE D'UN GRAFCET :
4.1- La squence linaire :
Une squence linaire est compose d'un ensemble
d'tapes successives o chaque tape est suivie d'une seule
transition et chaque transition n'est valide que par une
seule tape.
4.2- Les squences simultanes :
Lorsque le franchissement d'une transition conduit activer simultanment plusieurs squences
d'tapes, on obtient des squences simultanes qui s'excuteront paralllement mais indpendamment.
C'est--dire, l'volution de chacune des squences d'tapes dpendra des conditions d'volution du
systme automatis.
Pour reprsenter la structure des squences simultanes, on utilise deux traits parallles pour
indiquer le dbut et la fin des squences.
Considrons l'exemple de la figure 13 :
- La transition 'h', qui possde 2 tapes de sortie,
reprsente lexcution en parallle de plusieurs
squences. On appelle cette structure divergent ET :
Si l'tape 1 est active et la rceptivit h = 1, les tapes 2
et 12 sont actives
- La transition 'm.d', qui possde plusieurs tapes dentre,
reprsente la synchronisation de plusieurs squences. On
appelle cette structure convergent ET:
Si les 2 tapes 3 et 13 sont actives et la rceptivit m.d =
1, l'tape 14 est active.
4.3- Slection de squences :
Une structure alternative permet d'effectuer un choix unique d'volution entre plusieurs tapes en
aval partir d'une seule tape en amont. Pour reprsenter la structure alternative, on utilise un simple
trait horizontal pour indiquer le dbut et la fin des squences. Considrons l'exemple de la figure 14 :
- De l'tape 1 :
On active l'tape 2 si la rceptivit b = 1 et a =1 ;
Ou on active l'tape 12 si la rceptivit b = 1 mais a = 0.
On appelle cette structure "divergence en OU". Il est
noter que les branches d'une divergence en OU doivent
avoir des rceptivits exclusives, c'est--dire ne peuvent
pas tre vraies simultanment.
- L'activation de l'tape 14 peut provenir :
de l'tape 3 si elle est active et e = 1 ;
OU de l'tape 13 si elle est active et m = 1.
On appelle cette structure "convergence en OU".
3
2
pb
MF VM+
1 V+
VM-
s
ph
Fig12. Squence linaire
Fig13. Squences simultanes
Fig14. Slection de squences
Fonct i on - Trai ter
136
4.4- Le saut d'tapes :
Le saut d'tape reprsente un saut conditionnel permettant
de sauter plusieurs tapes pour activer une tape en aval dans la
squence.
Dans l'exemple de la figure 15, il y a un saut de l'tape 1
l'tape 4 mais conditionn par la rceptivit b.
4.5- Structure rptitive :
Une structure rptitive appele aussi une reprise de
squence, est un saut conditionnel permettant la reprise d'une
squence plusieurs fois (boucle) tant qu'une condition logique
fixe n'est pas obtenue.
Il y a reprise des tapes 1, 2 et 3 tant que la rceptivit a
n'est pas obtenue. On dit aussi que c'est un saut d'tape 3 1 par
la rceptivit a.b.
Fig16. Reprise de squence
Fig15. Saut d'tapes
Chapi t re 10 - Le GRAFCET
137
E X E R C I C E S R E S O L U S
EXERCICE N 1 : Malaxeur agroalimentaire
Le malaxeur tudi est un systme utilis dans des usines de
produits agro-alimentaires. Il dcrit le processus de
traitement dun produit liquide assurant le dosage dune
certaine quantit du liquide pour la porter une temprature
donne u
0
(c). Le systme est ralis autour de :
- Un bac de dosage A permettant de peser la quantit du
liquide chauffer ;
- Un ballon de chauffe permettant le chauffage et le
brassage (mlange) du liquide pes.
Le mode de marche du systme est cycle par cycle. Le dbut
de chaque cycle est command par l'appui sur le bouton
poussoir Dcy. Les tapes suivantes sont alors excutes :
- Louverture de EV1 autorise le remplissage du bac doseur A jusqu une valeur praffiche P1
du systme de pesage.
- Lorsque P1 est atteinte, on arrte le remplissage et on ouvre EV2 pour autoriser le
dversement du liquide du bac vers le ballon de chauffe B.
- A la fin du dversement (information P0), le circuit de chauffage RC et le moteur de brassage
MB sont aliments.
- La temprature de chauffage est contrle par le capteur B1. Lorsque la temprature u0 est
atteinte, le chauffage et le brassage sont arrts et on ouvre EV3 pour autoriser la
circulation du liquide chauff vers la suite du processus.
Au bout de 20 secondes, EV3 est dsactive et un nouveau cycle peut commencer.
EXERCICE N 2 : Etude dune chane dembouteillage
Il sagit dun systme utilis dans les usines de production des boissons liquides. Il dcrit une partie du
processus assurant les fonctions de remplissage et de bouchage des bouteilles.
Le systme est ralis autour de :
- Un tapis roulant permettant le dplacement des bouteilles.
- Un poste de remplissage P1 command par llectrovanne EV.
- Un poste de bouchage P2 command par un vrin presseur V double effet.
u
EV1
P1
P0
A
EV2
B
MB
EV3
RC
B1
TP
M
A : Bac de pesage.
B : Ballon de chauffe.
RC : Circuit de chauffe.
MB : Moteur de brassage.
EV1..3 : Electrovannes.
Moteur M
V
EV
Bouteille
Avancer dun pas
Capteur : TP
Capteur : BR
Capteur : F
Capteur : BE
Dcy : Dpart du cycle.
TP : Tapis en position.
BR : la bouteille est remplie.
F : Llectrovanne est ferme.
BE : Le bouchon est enfonc.
H : Le vrin V est en position
haute
Capteur : H
Fonct i on - Trai ter
138
Le dclenchement de la chane dembouteillage se fait par action sur linterrupteur Dcy. Le moteur
Avance Tapis : M tourne dun pas jusqu laction du capteur Tapis en position : TP . Une bouteille
est alors prsente chacun des postes P1 et P2. Les oprations de remplissage et de bouchage
seffectueront simultanment sur les deux bouteilles :
- Le remplissage se fera en deux tapes :
Ouverture de llectrovanne EV ;
Fermeture de EV aprs le remplissage de la bouteille. Le capteur Bouteille remplie :
BR permettra de contrler le niveau de remplissage des bouteilles.
- Le bouchage se fera en deux tapes :
Descente du vrin presseur V ;
Remonte du vrin V aprs lenfoncement du bouchon.
Il est noter que le cycle ne recommencera que si les deux oprations de remplissage et de bouchage
sont acheves.
CORRIGE :
EXERCICE N 2 :
EXERCICE N 1 :
Chapi t re 11 - Aut omate programmabl e i ndustri el
139
CHAPITRE 11
AUTOMATE PROGRAMMABLE INDUSTRIEL
INTRODUCTION
La matrialisation d'un GRAFCET peut tre ralise de deux faons :
- Logique cble base de bascules : elle est simple et adapte des petits systmes figs ;
- Logique programme base d'ordinateur, de microcontrleur ou d'automate programmable
industriel (API) : cette solution a l'avantage d'tre flexible et volutive puisqu'elle s'adapte
facilement tout changement du systme par un simple changement de programme.
1. LOGIQUE CABLEE
L'lment de base dans cette logique est la bascule SR. L'action Reset tant prioritaire (S = R = 1 alors
Q = 0), l'quation de la sortie Q a pour expression :
Pour matrialiser un GRAFCET, on associe chaque tape
une bascule SR ; en effet, dans un GRAFCET, une tape :
- est active (action Set) par la condition (Etape
prcdente ET rceptivit vraie) ;
- reste active mme si la condition (Etape
prcdente ET rceptivit vraie) devient fausse ;
- est dsactive (action Reset) si l'tape suivante est
active.
Ce fonctionnement est donc traduit par le schma ci-
contre. On appelle l'ensemble forme par la bascule SR et
la porte ET "module d'tape", car chaque tape sera
matrialise par ce module de base :
- i indique une tape i ;
- Ri indique la rceptivit associe l'tape i.
( ) R S Q Q . + =
S R
Q
S R
Q
i
i+1
Ri
Ri+1
i
i+1
Ri
Ri
+1
Module d'tape
0
1
2
3
4
Serrage (VS+)
Rotation MF Descente (VM+)
Monte (VM-)
Desserrage (VS-)
Dpart cycle Dcy
Pice serre (ps)
Pice perce (pp)
)
Retour effectu (fr)
Pice desserr (pd)
Dcy
pd
S R
Q
3
S R
Q
2
S R
Q
1
S R
Q
0
ps
pp
VS+
S R
Q
4
fr
VM+
MF
VM-
VS-
Exemple : Perceuse automatise
Fonct i on - Trai ter
140
- On passe du GRAFCET au schma avec modules d'tapes comme expliqu plus haut ;
- L'quation d'une sortie se dtermine :
en cherchant toutes les tapes o cette sortie est active ; et
en liant les sorties Q des bascules (X) associes ces tapes par un oprateur
logique OU.
Dans le cas de l'exemple ci-dessus :
- La sortie V est active dans l'tape 1 OU 2 OU 3, alors V = X1 + X2 + X3 ;
- La sortie MB est active uniquement dans l'tape 1, alors MB = X1 ; de mme, MK = X3.
2. AUTOMATE PROGRAMMABLE INDUSTRIEL :
2.1- Structure :
Un Automate Programmable Industriel (API) est une machine lectronique programmable destine
piloter en ambiance industrielle et en temps rel des systmes automatiss. La structure interne d'un
API est reprsente par la figure suivante :
- La mmoire : Elle permet :
De recevoir les informations issues des entres ;
De recevoir les informations gnres par le processeur et destines la commande des
sorties (valeur des sorties, des temporisations, etc.) ;
De recevoir et conserver le programme du processus.
- Lunit de traitement : Elle ralise toutes les fonctions logiques et arithmtiques partir d'un
programme contenu dans sa mmoire : elle lit et crit dans la mmoire et actualise les sorties.
Elle est connecte aux autres lments (mmoire et interface E/S) par un "Bus" parallle qui
vhicule les informations entre ces lments.
- Les interfaces d'entres/sorties :
Les entres reoivent des informations en provenance des lments de dtection et du
pupitre oprateur ;
Les sorties transmettent des informations aux pr-actionneurs et aux lments de
signalisation du pupitre.
Ces interfaces d'Entre/Sortie (E/S) se prsentent
gnralement sous forme dinterfaces modulaires
quon ajoute selon le besoin.
Issue de programmation
Connexion avec le la
console de programmation.
Signalisation
Etat des entres et des sorties
Entres / Sorties
Liaison capteurs/actionneurs
Modules d'E/S
Unit centrale de
traitement
Mmoire
Module
de
Sorties
logiques
Module
dentres
logiques
Alimentation
Console de programmation
Bus
Chapi t re 11 - Aut omate programmabl e i ndustri el
141
Linterface d'entre a pour fonction de :
Recevoir les signaux logiques en provenance des capteurs ;
Traiter ces signaux en les mettant en forme, en liminant les parasites d'origine
industrielle et en isolant lectriquement l'unit de commande de la partie oprative
(isolation galvanique) pour la protection ;
Gnralement les entres sont dsignes ainsi : %Ii.j o i est le numro du module et j le
numro de l'entre dans ce module, le signe "%" est spcifique au constructeur (ici
Telemecanique) . Exemple : %I0.3 reprsente l'entre 3 du module 0.
Linterface de sortie a pour fonction de :
Commander les pr-actionneurs et lments de signalisation du systme ;
Adapter les niveaux de tension de l'unit de commande celle de la partie oprative du
systme en garantissant une isolation galvanique entre ces dernires ;
Gnralement les sorties sont dsignes ainsi : %Qi.j o i est le numro du module et j le
numro de la sortie dans ce module. Exemple : % Q1.5 reprsente la sortie 5 du module 1.
- La console de programmation : C'est gnralement un PC o est install qui le logiciel de
programmation spcifique l'API. Ce logiciel permet d'diter le programme, de le compiler et
de le transfrer l'automate. Le PC peut galement servir de poste oprateur pour assurer la
conduite de l'unit. Un autre logiciel est alors ncessaire pour assurer le dialogue avec
l'automate.
2.2- Cycle d'excution d'un automate :
Durant son fonctionnement, un API excute le mme cycle de
fonctionnement qu'on appelle "cycle automate" ; la dure de ce
cycle est typiquement de 1 50 ms :
- Avant chaque traitement, l'API lit les entres et les mmorise
durant le cycle automate ;
- Il calcule les quations de fonctionnement du systme en
fonction des entres et d'autres variables et les mmorise ;
- Les rsultats sont recopis dans les sorties.
2.3- PROGRAMMATION DE LAPI
La programmation d'un API consiste traduire dans le
langage spcialis de l'automate, les quations de
fonctionnement du systme automatiser. Parmi les
langages normaliss, on cite quelques-uns des plus
connus et plus utiliss :
- Langage contacts (LADDER) ;
- Langage List d'instructions (Instruction List) ;
- Langage GRAFCET (Sequential Function Chart : SFC).
Gnralement, les constructeurs d'API proposent
des environnements logiciels graphiques pour la
programmation. Un exemple typique d'interface
graphique se prsente comme ci-contre :
Lecture
des entres
Excution du
programme
Mise jour des
sorties
Fonct i on - Trai ter
142
2.3.1- Le LADDER
a. Description :
Le langage Ladder est une succession
de "rseaux de contacts" vhiculant
des informations logiques depuis les
entres vers les sorties. C'est une
simple traduction des circuits de
commande lectriques.
b. Exemple :
Dans cet exemple, on traduit le GRAFCET correspondant la perceuse automatise en LADDER :
On a vu dans la matrialisation par bascules que :
- Si ltape i est active et si la rceptivit suivante est vraie alors ltape (i+1) est active.
- Lactivation de cette tape (i+1) dsactive ltape i.
Pour ltape1, en LADDER, ceci est reprsent par :
Le programme complet sera alors
Pour matrialiser ce GRAFCET, on utilise les associations
suivantes :
- Pour les fin de course :
Dpart de cycle % I0.1
Pice serre % I0.2
Pice perce % I0.3
Retour effectu % I0.4
Desserrage effectu % I0.5
- Pour chaque tape, on associe une variable
automate dont lindice est le numro dtape :
X0 pour ltape 0, X1 pour ltape 1, etc.
- Pour chaque action, on associe une variable de
sortie de lAPI.
Serrage % Q1.1
Rotation MF % Q1.2
Descente VM % Q1.3
Monte VM % Q1.4
Desserrage % Q1.5
% I0.1
% X0
% X1
S
% X1
% X0
R
Si X0=1 et I0.1=1 alors Set X1
Si X1=1 alors Reset X0
% I0.1
% X0
% X1
S
% X1
% X0
R
% I0.5 % X4
% X0
S
% X0
% X4
R
S1
S2
S3
K
% I0.0 %Q0.0
% I0.2
%
S1 : % I0.1
S2 : % I0.0
S3 : % I0.2
K : % Q0.0
Chapi t re 11 - Aut omate programmabl e i ndustri el
143
2.3.2- Liste dinstructions "IL" :
a. Description :
L'IL est un langage dans lequel toutes les oprations sont dcrites par des instructions mnmoniques.
Ce nest pas un langage graphique. Le tableau suivant donne une liste reprsentative de ce langage :
INSTRUCTION FONCTION
LD Lire une entre ou une variable interne.
LDN Lire linverse dune entre ou dune variable interne.
AND ET logique entre le rsultat de l'instruction prcdente et l'tat de l'oprande.
ANDN ET logique entre le rsultat de l'instruction prcdente et l'tat inverse de l'oprande.
OR OU logique entre le rsultat de l'instruction prcdente et l'tat de l'oprande.
ORN OU logique entre le rsultat de l'instruction prcdente et l'tat inverse de l'oprande.
N Ngation du rsultat de l'instruction prcdente
ST L'oprande associ prend la valeur du rsultat de la zone test.
STN L'oprande associ prend la valeur inverse du rsultat de la zone test.
S L'oprande associ est mis 1 lorsque le rsultat de la zone test est 1.
R L'oprande associ est mis 0 lorsque le rsultat de la zone test est 1.
END Fin de programme.
b. Exemple : le programme suivant est une mise en uvre du GRAFCET de lexemple de la perceuse
en langage IL
% I0.2
% X1
% X2
S
% X2
% X1
R
% I0.3
% X2
% X3
S
% X3
% X2
R
% I0.4
% X3
% X4
S
% X4
% X3
R
% X1
% Q1.1
% X2
% Q1.2
% Q1.3
% X3
% Q1.4
% X4
% Q1.5
Traitement postrieur : Activation des sorties
LD% I0.1
AND % X0
S % X1
R % X0
LD % I0.2
AND % X1
S % X2
R % X1
LD % I0.3
AND % X2
S % X3
R % X2
LD % I0.4
AND % X3
S % X4
R % X3
LD % I0.5
AND % X4
S % X0
R % X4
Traitement postrieur
LD % X1
S % Q1.1
LD % X2
S % Q1.2
S % Q1.3
LD % X3
S % Q1.4
LD % X4
S % Q1.5
END
Principe de base
LD % I0.0
ANDN % I0.2
OR % I0.1
ST % Q0.0
S1 : % I0.1
S2 : % I0.0
S3 : % I0.2
K : % Q0.0
S1
S2
S
K
Fonct i on - Trai ter
144
2.3.3- Sequential Function Chart (SFC)
a. Description :
Le SFC est le langage graphique qui traduit un GRAFCET sur un API. Par abus de langage, on l'appelle
aussi le langage GRAFCET. Pour diter un programme GRAFCET on passe par les tapes suivantes :
- On commence par construire graphiquement le GRAFCET ;
- On traduit les rceptivits dans le langage IL ou le langage LADDER ;
- La programmation des actions se fait dans le traitement postrieur en LADDER ou en "IL".
- En langage GRAFCET l'activation et la dsactivation des tapes se fait automatiquement.
Exemple du poste de perage
2.3.4- Fonctionnement des timers dans un API
Un temporisateur (Timer), a pour fonction de retarder une action. Dans un API on dispose
gnralement de trois type de temporisateur, dont le plus utilis est le temporisateur TON. Un
temporisateur TON, lorsqu'il est lanc, fait un retard t = N x TB, comme l'indique la figure suivante :
N : valeur de prslection ;
T
B
: Base de temps.
0
2
1
3
4
% I0.1
#
Ou en IL :
LD % I0.5
De mme pour les
autres rceptivits
Traitement postrieur en IL
LD % X1
S % Q1.1
LD % X2
S % Q1.2
S % Q1.3
LD % X3
S % Q1.4
LD % X4
S % Q1.5
END
Traitement postrieur en LADDER
% X1
% Q1.1
% X2
% Q1.2
% Q1.3
% X3
% Q1.4
% X4
% Q1.5
N x T
B
N x T
B
IN
TMi.Q
t
t
Chapi t re 11 - Aut omate programmabl e i ndustri el
145
E X E R C I C E S R E S O L U S
EXERCICE N 1 :
Le GRAFCET suivant reprsente le fonctionnement des feux de croisement. On se propose de le
matrialiser par langage GRAFCET.
On adopte le fonctionnement simple suivant :
- On tudie uniquement une voie ;
- Le vert s'allume pendant 6s ;
- L'orange s'allume pendant 2s.
- Le rouge s'allume pendant 8s.
Traduire les rceptivits en LADDER et le traitement postrieur en IL
Exemple :
CORRIGE :
EXERCICE N 1 :
L' interprtation de ceci en LADDER et en IL se fait comme suit :
0
1
2
3
Vert (V)
Orange (O)
Rouge (R)
Dcy
T1/1/6s
T2/2/2s
T3/3/8s
On utilise les association suivantes :
- Pour les fin de courses :
Dpart de cycle % I0.1
- Pour les timers on utilise trois timers de type
TON dont les sorties sont :
% TM0 % TM0.Q
% TM1 % TM1.Q
% TM2 % TM2.Q
- Pour chaque action, on associe une
variable de sortie de lAPI.
Vert (V) % Q1.1
Orange (O) % Q1.2
Rouge (R) % Q1.3
4
5
TM0/4/6s
- Le timer TM0 est lanc par la variable d'tape X4.
- Quand la sortie du timer TM0.Q passe 1 il doit activer
l'tape X5 et dsactiver l'tape X4.
- La dsactivation de X4 permet d'initialiser le timer pour
le prparer pour une nouvelle utilisation.
% X4
IN
Q
% TM0
% TM0.Q
% X5
% X4
LD % X4
ST % TM0.IN
LD % TM0.Q
S % X5
R % X4
Fonct i on - Trai ter
146
On propose dans ce qui suit la correction de l'application en traduisant les rceptivits et le
postrieur en LADDER.
% Q1.1
% X1
% X2
% X3
% Q1.2
% Q1.3
Traitement postrieur
#
% I0.0
0
1
2
3
#
% TM0.Q
#
% TM1.Q
#
% TM2.Q
Le GRAFCET
% X1
IN
Q
% TM0
% X2
IN
Q
% TM0
% X3
IN
Q
% TM0
Prliminaire : Initialisation des compteurs
147
Aprs le traitement des informations, le rsultat de traitement est communiqu son
environnement, qui est principalement reprsent par :
Les actionneurs, via les preactionneurs, qui agissent sur la matire d'uvre ;
L'Interface Homme/Machine qui reoit de l'unit de traitement des messages
renseignement sur l'tat du systme.
La position de la fonction "Communiquer" dans une chane d'information, ainsi que les
diffrentes ralisations principales sont reprsentes par la figure suivante :
UNITE ATC
FONCTION
C O M M U N I Q U E R
PRESENTATION
AQUERIR
Grandeurs
Consignes
physiques
,
Images
Informationnelles
utilisables
Ordres
Messages
Commande TOR
Interface homme / machine
Liaison utilisant le mode de transmission srie
Liaison utilisant le mode de transmission parallle
Rseaux
TRAITER COMMUNIQUER
COMPETENCES ATTENDUES
A partir de tout ou partie dun produit support avec son cahier des charges et son dossier
technique :
Enoncer les principaux paramtres caractrisant les diffrents types de liaisons
Mettre en uvre les lments ncessaires la ralisation d'une liaison
CHAPITRES INCLUS DANS LA FONCTION COMMUNIQUER
Interfaage en sortie
Liaison parallle Liaison srie
CHAPITRES INCLUS DANS LA FONCTION COMMUNIQUER
Fonct i on - Communi quer
148
CHAPITRE 1
INTERFACE EN SORTIE
INTRODUCTION :
Dans un systme automatis, l'unit de traitement communique les informations traites
principalement vers :
- L'utilisateur, grce aux organes de dialogue en sortie ? tel un voyant de signalisation ; il s'agit
de l'interface Homme/Machine (IHM) ;
- des organes de puissance tel un moteur lectrique triphas ; il s'agit d'interface de puissance
centr principalement sur l'isolation lectrique ou galvanique.
1. INTERFACE HOMME/MACHINE (IHM) :
Linterface Homme/Machine en sortie est une fonction de communication indispensable pour bien
grer un systme automatis. Il consiste fournir l'oprateur l'ensemble des informations concernant
l'tat du systme automatis quon dsigne par "messages". Le dialogue Homme/Machine se fait par
lutilisation de constituants regroups dans ce qu'on appelle "pupitre" de commande. On en dcrit
quelques-uns des plus populaires.
1.1. Les voyants :
Les voyants sont des tmoins lumineux qui constituent une interface
de dialogue simple donnant l'oprateur des informations sur l'tat du
systme automatis.
Les voyants possdent un code de couleur (NORME EN 60204-1 :1992)
qui permet d'orienter l'oprateur sur l'origine du message :
COULEUR SIGNIFICATION EXEMPLE
ROUGE Urgence ou condition dangereuse Arrt d'urgence
JAUNE
Condition anormale pouvant entraner une situation
dangereuse
Manque en matire d' uvre
VERT Prparation de conditions normales Dpart de cycle
BLANC Information gnrale Prsence de la tension rseau
1.2. Les afficheurs numriques :
Dans certaines applications industrielles, le contrle du
systme automatis ncessite de surveiller les paramtres avec
une grande prcision qui n'est pas permise par les voyants.
Les afficheurs numriques permettent d'effectuer une
surveillance prcises et informent loprateur des rsultats de
mesure (temprature, pression, etc.) ou de comptage (nombre de
cycle, quantit de pices produites, etc.).
1.3. Les afficheurs alphanumriques :
C'est un constituant de dialogue programm permettant dafficher des messages clairs concernant
l'exploitation, le dpannage ou le rglage du systme automatis.
Fig 4. Exemple de voyant
Fig. 5 Exemple d'afficheur numrique
Chapi t re 1 - I nterface en sort i e
149
1.4. Les terminaux d'exploitation :
Les terminaux d'exploitation sont des constituants de dialogue programms permettant
l'oprateur :
- D'tre inform clairement sur l'tat du systme automatis ;
- D'intervenir facilement et rapidement sur les paramtres de fonctionnement du systme
automatis.
Ces terminaux peuvent tre programms l'aide d'un terminal de programmation ou d'un micro-
ordinateur, et peuvent diter les vnements et les messages grce des imprimantes.
On distingue deux types de terminaux d'exploitation :
- Les terminaux d'exploitation afficheurs ;
- Les terminaux d'exploitation cran permettant l'affichage simultan d'un nombre plus
important de donnes en plus des reprsentations graphiques concernant le systme
automatis.
2. ISOLATION GALVANIQUE :
2.1. Principe et rle :
L'unit de traitement travaille typiquement avec une tension de 5V DC, ncessaire pour alimenter
principalement les circuits intgrs logiques. Alors qu'un actionneur tel un moteur triphas a besoin
d'une forte tension (220V AC, par exemple). Pour protger l'unit de traitement contre une ventuelle
liaison directe avec la forte de tension, il faut une isolation lectrique ou galvanique. Le principe est
rsum par le schma fonctionnel suivant :
2.2. Exemple de schma :
2.2.1- Principe :
Le schma le plus classique dans ce domaine est base de relais lectromagntique, ce qui donne
le schma de base suivant ; un tel montage, on le trouve dj intgr dans un API :
Unit de
traitement
Actionneur
de puissance
Isolation
galvanique
Terminal d'exploitation afficheur Terminal d'exploitation cran
Fig. 6 Exemples de terminaux d'exploitation
Fonct i on - Communi quer
150
- Quand l'unit de traitement communique l'ordre d'action (5 V), alors :
Le transistor Q, travaillant en commutation se sature ;
Le relais KA est excit avec la tension Vcc, ce
qui ferme son contact ; ce contact isol
lectriquement par rapport la commande
peut tre utilis pour tablir le courant dans
un organe de puissance (moteur, lampe,
rsistance chauffante, etc.) ;
La diode D n'a aucun rle dans cet tat ; elle
est bloque.
- Quand l'unit de traitement communique l'ordre de
commande d'arrt (0 V), alors :
Le transistor Q se bloque ;
Le relais KA est dsexcit, ce qui ouvre son contact ; la charge est alors
dsalimente.
dans cet tat, la diode D joue le rle de roue libre pour protger le transistor Q
contre la surtension qui apparat aux bornes de la bobine du relais KA, par dV/dt.
2.2.2- Exercice d'appilcation: Commande d'un contacteur
L'tage dj tudi est gnralement intgr dans un API, ou intgrer dans une carte de logique
cble ou une carte microprocesseur (P). Pour commander une charge de puissance relativement plus
grande que celle pouvant tre admissible par le relais (un moteur triphas), on utilise un contacteur KM :
- Le moteur est muni de son circuit de puissance (Sectionneur Q, contacteur KM, relais
thermique F) ;
- Si KA est excit, KM l'est de mme, le moteur tourne ;
- Si KA est desexcit, KM l'est de mme, le moteur s'arrte ;
R
D
Q
KA
Vcc
KA
Unit de
traitement
L1
L2
L3
N
D
Q
KA
Vcc
KA
Unit de
traitement
R
Moteur
(MAS)
KM
Q
F
Chapi t re 2 - Li ai son paral l l e et l i ai son sri e
151
CHAPITRE 2
LIAISON PARALLELE ET LIAISON SERIE
INTRODUCTION :
A l'intrieur, l'unit de traitement d'un systme automatis (API, etc.) communique les informations
naturellement en parallle sous un format de 8 bits ou plus. Mais, pour communiquer avec le milieu
extrieur, l'unit de traitement communique en gnral en srie, ce qui rduit le cblage.
1. LIAISON PARALLELE :
Exemple : Imprimante parallle
Un texte est un ensemble de caractres ;
chaque caractre est cod par un nombre de
8 bits (code ASCII). Avec une imprimante
parallle, le PC envoie le texte caractre
par caractre, mais en parallle, c'est dire
8 bits / 8bits ;
2. LIAISON SERIE : PRINCIPE
2.1- Introduction
Lorsque la distance devient grande, la
liaison parallle devient techniquement
difficile raliser cause de la longueur
du cblage et des parasites de
transmission ; on utilise alors la liaison
srie. Par exemple, un API est
gnralement, programm avec un PC ;
le mode de communication dans cette
situation est le mode srie.
Dans une liaison srie, on distingue plusieurs procds et techniques de transmission ; dans ce qui
suit on s'intresse la liaison srie asynchrone, en particulier avec les normes RS 232 et RS 485.
2.2. Principe de la liaison srie asynchrone :
2.2.1- Format :
La liaison srie asynchrone est oriente pour une transmission par caractres ; ces derniers sont
envoys individuellement et l'intervalle sparant 2 octets est quelconque. Ce mode asynchrone
utilise un format o chaque caractre :
- A une longueur de 5 8 bits
- Est encadr par des bits dlimiteurs :
1 bit START au dbut de chaque caractre.
1 2 bits STOP la fin de chaque caractre.
- Peut tre protg contre les parasites de transmission , par un bit de parit optionnel
(suivant la configuration du systme) destin la dtection d'erreurs ; il est gnr
l'mission et test la rception. Il existe deux types de parit :
Parit paire : la parit est dite paire si le nombre de bits (donne + bit parit) au
niveau logique 1 est paire.
Parit impaire : la parit est dite impaire pour un nombre impaire de bits 1.
0
1
1
0
1
1
0
0
Unit de
traitement
0
1
1
0
1
1
0
0
Priphrique
srie
Les 8 bits sont communiques en srie un par
un sur un seul fil
0
1
1
0
1
1
0
0
Unit de
traitement
0
1
1
0
1
1
0
0
Priphrique
parallle
Les 8 bits sont transmis en parallle sur 8 fils
Programmation d'API
avec PC
Fonct i on - Communi quer
152
Trame de
Donnes
START
Caractre 1
7 bits
Parit
Stop
Caractre 2
7 bits
0
0 0
1
1
1
1
1 1
1 0
0 0 0
Horloge
Non transmise
L'ensemble {Bit Start, Bits donnes, Bit parit, Bits Stop} est appel "trame" (frame). Voici un
exemple de trame srie asynchrone avec une parit paire ; elle reprsente la transmission de la
lettre "K" dont le code ASCIIest (75)
10
= (1001011) : on remarque que le bit LSB est transmis le
premier :
2.2.2- Fonctionnement :
Le fonctionnement est donc comme suit :
- Au repos, la ligne de transmission se trouve dans l'tat logique 1 ;
- Au dbut de la transmission d'un caractre, on commence par le bit de Start, qui
dure une priode d'horloge ;
- On enchane par les bits du caractre (suivant la configuration du systme), en
commencent par le LSB ;
- On termine par le bit de stop.
- A la rception de chaque caractre, l'initialisation a lieu par la transition (haut-bas)
du bit START qui assure la synchronisation des deux horloges (metteur et
recepteur) . Ds la rception du bit Stop, il n y a plus de synchronisation.
3. NORME RS232 :
3.1- Liaison possible :
La norme RS232 dfinie par l'EIA (Electrical Industry Association), correspond la norme ISO 2110.
Elle permet une liaison "point point". Il ne peut y avoir que 2 lments communicants.
3.2- Caractristiques :
3.2.1. Dfinition des signaux et connectique :
La liaison RS232 est une interface de tension pour la transmission srie
aussi bien synchrone qu'asynchrone, utilise pour les liaisons point
point. Elle est dfinie pour un connecteur SUB-D25 ou SUB-D9. Elle
comporte plusieurs signaux qu'on peut rassembler en deux groupes de
fonctions :
- Signaux de communication principaux : Tx et Dx.
- Signaux de dialogue "optionnels" : RTS, DTR, etc.
3.2.2. Longueur de ligne et vitesse :
La norme RS232 est aussi caractrise par :
- La longueur maximale du cble qui est denviron 15 mtres.
- Le dbit maximal qui est prsent de 20Kbits/s. La norme prvoit ainsi des dbits
(bits/s) de 75, 150, 300, 600, 1200, 2400, 4800, 9600 et 19200.
1 13
25
14
1
5
6 9
SUB-D25
SUB-D9
Chapi t re 2 - Li ai son paral l l e et l i ai son sri e
153
3.2.3. Les niveaux de tension :
Pour la rsistance au bruit, les
niveaux de tension de la RS232 sont
plus grands que ceux de la
TTL/CMOS. L'quivalence avec les
niveaux logiques sont dcrits par le
tableau suivant :
N. logique Niveau lectrique
'0' logique
'1' logique
+12V (de +5V +15V)
-12V (de -5V -15V)
Les circuits logiques l'origine de
la transmission sont compatibles
TTL/CMOS, il faut alors des circuits
d'adaptation la norme RS232 :
4. NORME RS485 :
4.1. Liaison possible :
La norme RS 485 est dfinie par l'EIA correspondant la norme
ISO 2593. Elle permet une liaison "multipoint", c'est dire, entre
plusieurs Elments Communicants (EC1, EC2,, ECn). Dans ce cas,
il faut qu'il ny aie quun seul lment (1/n) qui met dans le Bus ;
le reste des lments reoit (il est l'coute). Dans cette liaison
multipoint, on dsigne la ligne de transmission de "Bus", car c'est
comme une route de bus qui dessert plusieurs stations. Il est
vident que pour qu'une communication soit possible, il faut que
chaque EC dispose d'une interface pour le bus, plus prcisment la
possibilit de se mettre en haute impdance ; ainsi, on vide les
conflits de Bus, cas o 2 EC mettent sur le Bus.
4.2- Caractristiques :
4.2.1- Dfinition des signaux et connectique :
La norme RS485 est surtout utilise dans les rseaux
locaux industriels aussi bien point point que
multipoints. Elle utilise un support de transmission
diffrentiel : le signal est transform en deux signaux
complmentaires (A et B), ce qui assure une
rsistance aux parasites industrielles et augmente la
longueur maximale de la ligne ; la norme ne prcise
pas de connecteur spcifique. Rt : Rsistance de
terminaison de cble. Elle boucle la ligne sur son
impdance caractristique et minimise le bruit pour
une meilleure transmission.
4.2.2. Longueur de ligne et vitesse :
La norme RS485 est aussi caractrise par :
- La longueur maximale du cble qui est de 1000 m.
- Le dbit maximal qui est prsent de 100 Kbits/s. La norme prvoit ainsi des dbits (bits/s)
de 75, 150, 300, 600, 1200, etc.
EC1 EC2 ECn
Liaison multipoint (RS 485)
Bus
Rt
Emetteur
Rcepteur
Ligne
A
B B
A
Rt
Fonct i on - Communi quer
154
4.2.3. Niveaux de tensions :
L'quivalence avec les niveaux logiques sont dcrits par le
graphique ci-contre. Les circuits logiques l'origine de la
transmission sont compatibles TTL/CMOS, il faut alors des
circuits d'adaptation la norme RS485, pour convertir une
tension bipolaire en une tension diffrentielle. Parmi les
circuits les plus utiliss cette fin, on trouve l' AD485 et
SN75176 :
4.3. Notion de protocole :
La figure ci-contre montre une architecture typique dans un environnement
industriel, avec la norme RS485. Les n API de commande et le PC de
supervision sont relis donc en rseau ; ils peuvent donc changer des
informations. Cela a pour avantage :
- Une programmation structure ; par exemple, pour un systme
automatis plusieurs postes, on rserve chaque poste un API ;
- Un gain en cblage dans l'application ;
- Une facilit de maintenance.
Il va sans dire que le Bus est partag et doit donc connatre un "arbitrage" ; en effet, d'aprs la
structure physique du rseau (norme RS485), il ne peut y avoir q'un seul lment qui met sur le bus, le
reste coute ; d'o la ncessit de s'accorder sur des rgles de communication, qu'on appelle
protocole. Un protocole doit donc rsoudre les problmes lis aux questions suivantes :
- Quel est le format de la trame, etc. ?
- A qui s'adresse la trame sur le bus ?
A titre d'exemple, on donne le principe d'un protocole largement diffus dans ce domaine ; il s'agit
de "ModBus" de MODICON. C'est une structure "Matre/Esclave" (Master/Slave). Dans ce protocole , il y
a un seul matre (exemple le PC) et n esclaves (exemple les API). Dans le cas de la figure ci-dessous :
- Le PC est le matre ; les n API sont les esclaves ;
- Chacun des API a une adresse ;
- Le PC envoie une demande un API et attend une rponse ;
- L'API interrog rpond la demande du PC ;
- Chaque demande du matre ou rponse d'esclave est un ensemble d'octets (trame) qui a le
format ci-contre :
Adresse : 1 octet reprsentant l'adresse de l'esclave ;
N octets : Ces N octets reprsentent l'objet de la
demande du matre ou de la rponse d'un
esclave ;
CRC16 : 2 octets de dtection d'erreur, calcul suivant un algorithme prcis, d'aprs les
octets (Adresse + N Octets).
+6V
+0.3V
-0.3V
-6V
Niveau logique '0'
Niveau logique '1'
Zone de transition
Niveaux logiques
Adresse N Octets CRC16
Trame
B
u
s
d
e
c
o
m
m
u
n
i
c
a
t
i
o
n
API 1
PC
API 2
API n
Chapi t re 2 - Li ai son paral l l e et l i ai son sri e
155
E X E R C I C E S R E S O L U S
Pour une configuration avec 7 bits de donnes, pas de parit et un bit de stop :
1.1- Donner la trame pour la transmission de la lettre "A", en indiquant la signification des diffrents bits.
1.2- Calculer le rendement de ce mode transmission, en calculant le rapport : (Bits de donnes)/(Bits de la trame).
CORRIGE :
1.1- Le code ASCCI de A est (65)
10
= (1000001)
2
".
1.2- On a 7 bits de donnes transmettre, mais on en transmet 10 Rendement =7/10=70%.
E X E R C I C E S N O N R E S O L U S
Le schma ci-dessous reprsente un convertisseur TTL/RS232 et un convertisseur RS232/TTL. La
communication entre un systme P et un PC se fait l'aide d'une liaison srie asynchrone RS 232 en utilisant :
Du ct systme P, l'interface srie est compatibles TTL ;
Du ct PC, le port srie COM1 ou COM2 utilise la norme RS 232 caractrise par :
- Une tension +12 V pour le niveau bas ;
- Une tension -12 V pour le niveau haut.
Les signaux RTS et DTR non utiliss, alors ils sont maintenus 12V et +12V pour servir d'alimentation.
1- La conversion RS232/TTL se fait par le montage autour du transistor Q.
1.1- Prciser les valeurs de la tension de la ligne RxD ct P correspondantes respectivement au niveau haut
et au niveau bas de TxD ct PC.
1.2- Quel est le rle de la diode D1 ?
2- La conversion TTL/RS232 se fait par le montage autour de l'amplificateur oprationnel Aop.
2.1- Prciser les valeurs de la tension de la ligne RxD ct PC correspondantes respectivement au niveau haut et
au niveau bas de TxD ct P.
2.2- Quel est le rle des diodes D2 et D3 ?
3- L'allure de la ligne TxD ct P, lors de la
transmission d'un caractre de 8 bit (D0
D7), est donne par le chronogramme
suivant :
3.1- A chaque priode d'horloge, correspond un bit. Donner le nom de chaque bit.
3.2- Tracer l'allure de la ligne RxD ct PC correspondant.
1
6
RxD
RTS
TxD
DTR
GND
Systme
Microprocesseur
(P)
D1
Aop
R
R
Rb
Rc
5V
D3
D2
LM780
C1 C2
5V
5V
Le port srie
du PC
Q
RxD
TxD
Start Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 Bit 5
Bit 6 Stop
Clk
TxD
Caractre transmis
UNI TE TRANSMETTRE
156
UNI T T
Tr ans met t r e
C O MP E T E N C E S A T T E N D UE S
Reprsenter graphiquement un systme et schmatiser son fonctionnement
en exploitant les modeleurs volumiques.
Analyser les solutions constructives matrialisant la fonction liaison.
Analyser les solutions constructives matrialisant la fonction guidage.
P R E S E N T A T I ON
Le mouvement de rotation recueilli par l'arbre de sortie d'un moteur lectrique, ainsi
que le mouvement de translation que permet la tige de sortie d'un vrin pneumatique n'est
pas toujours bien adapt pour agir directement sur la matire d'uvre d'un systme
automatis.
Pour agir correctement, il faut alors transmettre ces mouvements en les adaptant en
changeant la vitesse ou le sens ou la nature de mouvement, etc.
Normalement "Transmettre" est une fonction de la chane d'nergie. Mais, vu son
importance, une unit appele "Unit T" lui est rserve. Sa position dans une chane
d'nergie reprsente dans la figure suivante :
Grandeurs
physiques
mesurer
U n i t T
nergies
dentre
ACQUERIR TRAITER COMMUNIQUER
AGIR
Chane dinformation
Informations
destines dautres
systmes et aux
interfaces H/M
Ordres
Informations
issues dautres
systmes et
dInterfaces H/M
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
Matire d'uvre
en entre
Matire d'uvre en
sortie
Chane dnergie
Chapi t re 1 - Gnral i t sur l e dessi n i ndustri el
157
CHAPITRE 1
GENRALITES SUR LE DESSIN TECHNIQUE
INTRODUCTION :
Le dessin technique, manuel ou assist par ordinateur, est l'outil graphique le plus utilis par les
techniciens et les ingnieurs pour passer de l'ide la ralisation d'un objet ou produit. C'est un langage
de communication universel dont les rgles prcises sont normalises internationalement.
1. PRINCIPAUX TYPES DE DESSINS INDUSTRIELS :
1.1- Dessin d'ensemble :
Il indique comment les pices sont assembles et disposes les unes par rapport aux autres, et
reprsente le mcanisme dans son ensemble.
1.2- Dessin de dfinition :
Il reprsente une pice et la dfinit
compltement (formes, dimensions). Il
comporte toutes les indications ncessaires et
utiles pour la fabrication de la pice.
2. FORMATS :
Un dessin technique peut tre reprsent sur des feuilles de dimensions normalises appeles :
formats. La srie A (A0, A1, A2, A3, A4) normalise est universellement utilise. Le format A0 (189 x 841)
est le format de base ; Un format directement infrieur sobtient en divisant la longueur par 2.
A4 A3
A2
210
2
9
7
2
9
7
420
4
2
0
594
17.55
9
UNI TE TRANSMETTRE
158
3. ELEMENTS PERMANENTS :
- Le cadre : Il dlimite la surface de travail sur le format.
Il se situe 10 mm du bord de la feuille pour les
formats courants (A4, A3, A2) et 20 mm pour les
autres formats.
- Le repre dorientation : Il permet dorienter le dessin.
Il doit toujours tre dirig vers soi.
4. L'ECHELLE :
Lorsque les objets sont grands (immeubles, automobiles, etc.) ou petites (montres, circuit
lectronique, etc.), il est ncessaire de faire des rductions ou des agrandissements pour reprsenter ces
objets. Lchelle dun dessin est donc le rapport entre les dimensions dessines et les dimensions relles
de lobjet.
5. LE CARTOUCHE :
Le cartouche est un tableau situ au bas du format et comportant les informations suivantes : le titre
du dessin, lchelle du dessin, lidentit du dessinateur (nom, prnom, classe), la date, le format, le nom
de ltablissement, le symbole de disposition des vues. Exemple de cartouche
chelle Nom dessinateur
Symbole
Titre du dessin
date
Format Nom de l'tablissement classe
Le symbole de disposition des vues montre la disposition des vues par rapport au dessinateur
Symbole europen Symbole amricain
- Ce quon observe gauche, on le
reprsente droite ;
- Ce quon observe en dessous, on le
reprsente en dessus.
- Ce quon observe gauche,
- On le reprsente gauche ;
- Ce quon observe en dessous, on le
reprsente en dessous.
Surface de travail
Cadre
Bord du format
10 mm
Repre d'orientation
Dimensions dessines
Dimensions relles
Dimensionrelledessines
Echelle =
Dimensionr
Echelle 1:2
Echelle 1:1 Echelle 2:1
Chapi t re 1 - Gnral i t sur l e dessi n i ndustri el
159
6. NOMENCLATURE :
Cest la liste complte des pices qui constituent un ensemble dessin. Elle est lie au dessin par les
repres des pices (1, 2, 3,etc.). La nomenclature est compose de 5 colonnes :
REP NBR DESIGNATION MATIERE OBSERVATION
- Le repre de chaque pice (REP.) ;
- Le nombre de chaque pice (NBR.) ;
- Le nom des pices (DESIGNATION) ;
- La matire de chaque pice (MATIERE) ;
- Une observation si ncessaire (OBS.).
7. ECRITURE :
Sur un dessin technique, on utilise une criture normalise. Dans une criture les caractres doivent
avoir la mme hauteur et le mme espace entre eux. On trouve 2 types d'criture : droite et penche
(incline). Par exemple :
Ecriture droite: Rondelle.
Ecriture penche: Rondelle.
Remarque : En dessin manuel, les critures sont ralises laide dun trace lettre :
8. LES TRAITS :
Plusieurs types de traits sont employs en dessin technique. Un trait est caractris par :
- sa nature : continu ou interrompu ou mixte ;
- son paisseur : fort ou fin.
Tableau des diffrents types de trait :
Type Dsignation Application ou usage
Continu fort
- Artes et contours vus
- Cadre et cartouche
Interrompu fin Artes et contours cachs
Mixte fin
- Axes
- Plan de symtrie ou de coupe
- Elment primitif
Continu fin
Ligne d'attache de repres ou de ctes,
hachures ,filetages
Continu fin ondule
ou en zigzag
Limites de vues ou de coupes partielles
Mixte fin deux
tirets
- Contours de pices voisines
- Dtail avant plan de coupe
- Demi rabattement
- Positions des pices mobiles
UNI TE TRANSMETTRE
160
CHAPITRE 2
TRACES GEOMETRIQUES - INTERSECTIONS
Un objet est un ensemble de points, droites, surfaces et volumes. Pour
dessiner un objet, il faut donc lier ces lments entre eux et utiliser la
gomtrie descriptive pour sapprocher de limage relle de lobjet.
1. TRACES GEOEMETRIQUES :
1.1. Construction d'un angle droit :
1. Tracer un segment [MN] Fig 2 ;
2. Placer la pointe du compas sur le point N et tracer un arc de
cercle C (N, R) ;
3. Placer la pointe du compas sur le point M et tracer un arc de
cercle C' (M, R) qui coupe C en K et en L ;
4. Relier les intersections K et L des deux cercles C et C.
1.2. Tangentes :
La tangente en un point M du cercle est la perpendiculaire au rayon
R en ce point.
1.3. Raccordements entre deux circonfrences :
Soit les cercles C1 (O1, R1), C2 (O2, R2) et R le rayon de
raccordement.
1. Tracer le cercle (O1, R+R1) ;
2. Tracer le cercle (O2, R+R2) ;
3. L'intersection des deux cercles donne K et L ;
4. Tracer les arcs de raccordement (K, R) et (L, R).
1.4. Polygones rguliers :
Un polygone rgulier est un polygone ayant les cts et les angles gaux.
Exemple : Construction d'un hexagone :
La construction d'un hexagone se fait simplement l'aide de
trois cercles de mme rayon R = ct du hexagone.
1. Tracer un cercle C1 de centre O et de rayon R ;
2. Tracer un diamtres quelconque, lintersection avec le
cercle C1 est D et D ;
3. Tracer un demi cercle C2 de diamtre 2R et de centre
D, lintersection avec le cercle C1 est D2 et D3 ;
4. Tracer un demi cercle C3 de diamtre 2R et de centre
D, lintersection avec le cercle C1 est D1 et D4 ;
5. D, D1, D2, D3, D4, D doit former un hexagone rgulier.
M
R
C2
R2
C1
R1
O2
O1
L
K
R
M
N
L
K
D1
D2
D
D3
D4
D
O
C1
C2
C3
Chapi t re 2 - Tracs gomt ri ques - I ntersecti ons
161
2. INERSECTIONS :
2.1. Intersection cylindre/plan :
1. Dterminer les points extrmes (1-2-3-4)
2. Sur la vue de gauche, choisir un point m;
3. Rappeler le point m sur le plan, sur la vue de
face.
4. Rappeler le point m de la vue de face et de la vue
de gauche, sur la vue de dessus.
2.2. Intersection cne /plan : (plan quelconque // l'axe du cne) :
1. Lintersection est une ellipse, on utilise la
mthode de 4 point pour la dessiner ;
2. Sur la vue de face, dterminer les extrmes (1, 2,
3, 4) ;
3. Rappeler ces points sur la vue de dessus Fig 9
(b);
4. Rappeler ces points, sur la vue de gauche ;
5. Sur la vue de dessus, rappeler ces points de la
vue de gauche par la ligne 45;
6. lellipse est obtenue sur la vue de gauche et de
dessus.
2.3. Intersection cylindre/cylindre : (axes perpendiculaires) :
2.3.1-Mmes diamtres :
Les cylindres bleu et orange ont le mme diamtre. Tracer les diagonales ou les moitis de
diagonales en trait continu fort
2.3.2- Diamtres diffrents :
1. Diviser la section droite, du cylindre au plus petit diamtre, en parties gales (reprer).
2. Faire passer les plans scants par ces points : ces plans sont frontaux. Ils dterminent des
gnratrices dans le second cylindre.
3. L'intersection de ces gnratrices, avec les gnratrices correspondantes du premier cylindre,
dtermine la courbe d'intersection.
4. L'intersection est obtenue en joignant tous les points.
1
4
3
m
2,4,
4
1
1
m
2
4
3
Ligne
45
m
3
2
1
1
2, 4
3
1
2
4
3
Ligne
45
4 2
UNI TE TRANSMETTRE
162
CHAPITRE 3
REPRESENTATION GEOMETRIQUE DES PIECES
INTRODUCTION :
Pour tre utilisable, limage dun objet doit tre reprsente fidlement. Limage
ne doit pas tre dforme. Lantenne parabolique ci-contre doit tre prsente sous
forme de plusieurs vues, afin de donner une ide dtaille sur le fonctionnement dans
diffrentes positions.
1. PERSPECTIVE CAVALIERE :
1.1- But :
La perspective cavalire permet de donner en une seule vue une ide
globale des formes de lobjet reprsenter. Par exemple, limage ci-contre
reprsente en perspective cavalire la pice serre-bras du positionneur.
1.2- Dfinition :
La perspective cavalire est une projection oblique parallle une direction
donne, sur un plan parallle la face principale de lobjet reprsenter.
1.3- Trac pratique :
La face principale se projette en vraie grandeur. Les artes perpendiculaires
au plan de projection se projettent suivant des droites obliques parallles
appeles "fuyantes" et dont les dimensions sont obtenues en multipliant les
longueurs relles par un mme coefficient de rduction k. Linclinaison des
fuyantes (angle de fuite ) et le coefficient de rduction sont normaliss, soit :
= 45; k = 0,5.
Orientations possibles :
Haut vers gauche Haut vers la droite Bas vers la gauche Bas vers la droite
2. PROJECTIONS ET VUES :
Pour mieux dcrire la gomtrie dun objet, on est ramen de passer dune reprsentation en
perspective une reprsentation en vues. Cette projection ncessite la prsence de trois lments :
loservateur, lobjet et le plan de projection(dessin).
Face
principale
Fuyantes
Chapi t re 3 - Reprsent ati on gomtri que des pi ces
163
2.1. Dfinition :
Cest la projection orthogonale sur les plans de projection dun objet dont la face principale est
parallle au plan de projection. Les lignes de projection sont parrallles entre elles et perpendiculaire
au plan de projection. Il existe principalement 2 types de projection :
- Projection europenne ;
- Projection amricaine.
2.2. Projection Europenne :
2.2.1- Principe :
On imagine la pice lintrieur dun cube et on projette lobjet sur les six faces :
UNI TE TRANSMETTRE
164
2.2.2- Disposition des vues :
On dveloppe le cube de projection et on obtient six vues gomtrales sur le mme plan :
1 : Vue de Face.
2 : Vue de Gauche.
3 : Vue de Dessus.
4 : Vue de Droite.
5 : Vue de Dessous.
6 : Vue dArrire.
Remarques :
- Les vues sont nommes selon la position de lobservateur par rapport la vue principale.
- Il y a correspondance (alignements) entre les vues :
Correspondance horizontale.
Correspondance verticale.
Correspondance en querre.
3. COUPES SIMPLES HACHURES :
3.1. Rle :
Les coupes simples permettent de voir lintrieur
dune pice rendant plus lisible les dessins, (moins de
traits interrompus ) .
3.2. Hachures :
Sur les dessins d'ensemble on utilise quelquefois
des hachures correspondant aux grands types de
matires employs pour la fabrication des pices. Ces
hachures facilitent la lecture des dessins.
3.2.1- Type de hachures :
1. Le cuivre et ses alliages ;
2. Les alliages lgers ( alliage daluminium ) ;
3. Les isolants ( matires plastiques ) ;
4. Hachures ordinaires : tous matires et alliages ;
A
hachur
A-A B-B
A
B
B
Plan de coupe
4 3 2 1
Chapi t re 3 - Reprsent ati on gomtri que des pi ces
165
3.2.2- Rgles :
- Pour connatre la matire exacte employe,il faut regarder la nomenclature ;
- Pour une pice trs fine, les hachures sont remplaces par un noircissement de section coupe.
- Les hachures ne coupent jamais les traits forts ;
- Les hachures ne sarrtent jamais sur un trait interrompu.
- Tracer des hachures en trait continu fin inclins 45ou 30ou 60 et espaces de 3mm ;
Exemples :
3.3. Coupes particulires :
4. SECTION :
4.1. Dfinitions :
Une section reprsente juste la surface coupe par le plan de coupe,
alors qu'une coupe reprsente la projection d'un volume.
4.2. Reprsentation :
Coupes plans parallles
Coupes plans scants
Demi - coupe
A-A
A
A
B-B
B
B
Coupe d'une pice pleine
Coupe d'une nervure
rabattue
sortie
UNI TE TRANSMETTRE
166
5. NOTIONS SUR LE FILETAGE :
L'ensemble vis et crou permet dassembler 2 ou plusieurs pices grce la
forme hlicodale appele filetage pour la vis et taraudage pour l'crou.
5.1. Caratristiques :
5.2.1- Pas d'un filetage :
Le pas dun filetage est la distance qui spare 2 sommets conscutifs dun
mme filet Le pas est la course en translation dun crou lorsquil tourne de 1
tour.
5.2.2- Relation :
Si T est la translation en mm, R est le nombre de tours sans units et Pas est le pas en mm, on a.
T = pas x R
5.2.3- Inclinaison du filetage :
Il existe 2 sortes d'inclinaison de filetage ( droite ou
gauche).
5.2. Reprsentation :
La vis tant une pice pleine, elle n'est pas coupe.
Droite Gauche
Dessin densemble
Dessin de dfinition
Chapi t re 3 - Reprsent ati on gomtri que des pi ces
167
E X E R C I C E R E S O L U
Dessinez les vues de la pice ci-contre, en :
1. Vue de gauche ;
2. Section sortie A-A ;
3. Coupe A-A.
E X E R C I C E N O N R E S O L U
Soit la pice ci-dessous reprsente suivant une vue de dessus complte et la perspective. Le travail
faire est de dessiner :
- Une vue de face coupe C-C ;
- Une vue de droite coupe B-B ;
- Une vue de gauche coupe A-A.
Pour cela on demande :
1. Mettre les noms des coupes A-A, B-B et C-C au-dessus des vues.
2. Mettre les plans de coupe, les flches et les lettres autour des vues.
3. Colorier en bleu sur la perspective la partie de la pice reprsenter dans la vue de face en
coupe C-C ;
4. Complter la vue de face en coupe C-C ;
5. Colorier en rouge sur la perspective la partie de la pice reprsenter dans la vue de gauche en
coupe A-A ;
6. Complter la vue de gauche en coupe A-A ;
7. Colorier en vert sur la perspective la partie de la pice reprsenter dans la vue de droite en
coupe B-B ;
8. Complter la vue de droite en coupe B-B.
UNI TE TRANSMETTRE
168
CHAPITRE 4
EXECUTION GRAPHIQUE DE LA COTATION
Pour raliser un objet partir dun
dessin, il faut une reprsentation
graphique complte et prcise des
formes et contours (rle des vues
normalises) et une description
dtaille et chiffre des dimensions
essentielles ; cest le rle de la
cotation.
Pour faciliter la tche aux divers
intervenants dans la ralisation de
lobjet, on doit matriser correctement
lexcution graphique de la cotation.
1. ROLES :
1. Permet d'avoir les dimensions de la pice sans avoir mesurer ce qui manquerait de prcision ;
2. Permet l'ouvrier qui ralise la pice de ne pas se soucier de l'chelle du dessin ; on doit toujours
mettre les ctes relles sur un dessin ;
3. Permet d'indiquer d'autres renseignements que les dimensions: les tolrances, les formes des
surfaces, la position des surfaces, etc. ;
4. Permet de ne pas se soucier de l'unit car les dimensions sont toujours en mm. On ne met pas
lunit ;
5. Permet de ne pas refaire le dessin si une dimension est change.
2. EXECUTION GRAPHIQUE DE LA COTATION :
2.1. Cte :
La plupart des dimensions (longueurs,
largeurs, hauteurs, angles, etc.) sont
sous forme de cotes. Une cote se
compose des quatre lments principaux
suivants :
- Une ligne de cte, en trait fin ;
- Deux lignes de rappel, dattache ou
dextension, en trait continu fin.
Un trait daxe, ou mixte fin peut
aussi tre utilis ;
- Deux flches prcisant les limites de la ligne de cte ;
- Un texte (dimension chiffre de la cte plus tolrance ventuelle).
- Si la ligne de cte est horizontale, crire le texte au milieu et au-dessus de la ligne ;
- Si la ligne de cte est verticale, crire le texte au milieu gauche de la ligne et de bas en haut.
Ligne dattache
Flche
Cte nominale
Ligne de cote
6
2
3
1
Chapi t re 4 - Excuti on graphi que de l a cotat i on
169
5 x 45 5
30
5 x 45
2 ctes
Chanfrein
V
3 ctes
Rainure
Entaille
1 ou 2 ctes 4 ctes
2.2. Erreurs ne pas commettre ou rgles respecter :
a. Pas de cote dans la vue ;
b. Pas de cote sur des pointills ;
c. Pas de ligne de cte coupe ;
d. Pas de cte surabondante (en trop) ;
e. Pas de place, utiliser des lignes de
repres ;
f. Flches opposes remplaces par un
point ;
g. Cte extrieure flche extrieure ;
h. Cote 6mm de la vue.
2.3. Cotation des angles :
2.4. Cotation des pices symtriques et des diamtres :
Pour les cotes ne pouvant avoir quune ligne
dattache, prolonger la ligne de cote de 5 mm
au-del de laxe de symtrie
.
E X E R C I C E R E S O L U
Cter la pice prismatique ci -dessousen respectant les rgles de ctation.
Remarque : Huit ctes sont ncessaires.
CORRIGE :
La ctation est reprsente en bleu
15
2
0
25
10 5
5
5
1
0
5
5
5
5
5 5
10
.
5 5
5 5
a b
c d f e
UNI TE TRANSMETTRE
170
CHAPITRE 5
REPRESENTATION VOLUMIQUE
La conception Assiste par Ordinateur (CAO) est un ensemble doutils et
techniques utiliss dans une ou plusieurs phases du dveloppement dun produit
en utilisant l'ordinateur. Ces outils logiciels, permettent par exemple de crer
des pices mcaniques, d'en prparer la fabrication, de les assembler et de
simuler leur comportement ou leur fonctionnement.
1. MODELEUR VOLUMIQUE :
Un modeleur volumique est un logiciel de conception mcanique 3D qui permet de crer :
- Des pices ;
- Des assemblages ;
- Des mises au plan d'une pice ou d'un assemblage.
Une pice dans un modeleur 3D est constitue dun volume de base sur lequel est ralis des
fonctions technologiques dont certaines ncessitent une esquisse.
1.1. Esquisse :
Une esquisse est une figure cote trace sur l'un des plans initiaux ou sur une surface plane de la
pice. Elle est toujours associe une fonction technologique.
1.2. Fonction technologique :
Une fonction technologique permet d'ajouter ou enlever de la matire une pice. On trouve des
fonctions technologiques qui ncessitent des esquisses, d'autres s'appuient simplement sur les artes et
les surfaces de la pice. Certaines crent automatiquement leurs esquisses.
1.3. Arbre de construction :
Larbre de construction reprsente lenchanement des fonctions technologiques appliques la
pice.
Arbre de construction Pice
Chapi t re 5 - Reprsent ati on vol umi que
171
2. CREATION DES VOLUMES ELEMENTAIRES :
3. CREATION D'UNE PIECE SIMPLE :
Toute pice est dcomposable en un ou plusieurs volumes lmentaires. Pour crer une pice dans un
modeleur volumique on cre un volume de base et par la suite on ajoute et/ou on retranche des volumes
lmentaires jusqu' obtention de la pice voulue. L'ajout des volumes est traduit par des fonctions
d'ajout de matire : bossage, symtrie, etc. Le retranchement d'un volume se traduit par des fonctions
d'enlvement de matire : enlvement de matire par extrusion, chanfrein, perage, etc.
Exemple 1
Esquisse 1 sur un plan initial
Volume de base (bossage) Esquisse 2 sur une face
Enlvement de matire par extrusion Slection des artes
Chanfrein
Esquisse 3 sur une face
Enlvement de matire /extrusion Esquisse 4 sur une face (cercle)
Esquisse
Fonction appliquer Volume lmentaire
Bossage /Extrusion
Bossage /Extrusion
Bossage/rvolution
UNI TE TRANSMETTRE
172
Exemple 2
4. CREATION D'UN ASSEMBLAGE SIMPLE :
Un assemblage constitu de plusieurs pices peut tre cr partir de modles pices standard ou
cres dj par lutilisateur. On importe dans ce modle chaque pice du mcanisme ou un sous ensemble
du mcanisme, puis on applique entre les surfaces des diffrentes pices des contraintes gomtriques
(concidence, tangence, etc.). Les pices se positionnent les unes par rapport aux autres d'une faon
automatique.
Exemple :
Pices importes
- Concidence entre les
surfaces planes de 1 et 2
- Coaxialit entre les trous
de 1 et 2
- Coaxialit entre 3 et les trous
de 1 et les trous de 2
- Concidence entre la surface
cylindrique de 3, 2 et 1
Enlvement de matire /extrusion
Perage
Rptition linaire de perage
Face de symtrie (verte) Fonction symtrie
Pice termine et colorie
Axe (3)
Vis (1)
Levier (2)
Esquisse initiale
Extrusion par rvolution Chanfrein
Perage
Rptition circulaire
Pice termine et colorie
Chapi t re 5 - Reprsent ati on vol umi que
173
E X E R C I C E R E S O L U
Etant donn le dessin de dfinition du corps d'une bute rglable, on demande de crer le modle
volumique de cette pice.
CORRIGE
- Cration dune fonction de base :
Slection dun plan :Face [1]
Cration dune esquisse [2],[3]
Extrusion [4]
- Ajout dautres fonctions :
Slection dune face [5]
Slection de la fonction chanfrein
Slection dune face[6]
Cration dune esquisse
Extrusion enlvement de matire
UNI TE TRANSMETTRE
174
CHAPITRE 6
TOLERANCES ET AJUSTEMENTS
Compte tenu de du processus de fabrication choisi et des machines utilises, une cte relle mesurant
lune des dimensions dun objet ne peut tre exactement la mme que celle (nominale) indique sur le
dessin correspondant. Une cte impose sera plus facile raliser si elle peut varier entre deux valeurs
limites (tolrances). Une tolrance permet au fabricant de raliser une cte approximative. La cte
parfaite conduisant un long temps de fabrication, donc un prix de revient lev.
1. TOLERANCES DIMENTIONNELLES :
1.1. Tolrances chiffres :
Ce sont les tolrances les plus utilises ; elles sont utilises pour les surfaces de prcision moyenne
et elles sont en dixime de mm. Par exemple :
1.2. Tolrances normalises (norme ISO ) :
Elles sont utilises lorsque 2 pices doivent s'emboter parfaitement ; on dit que les 2 pices sont
ajustes. Elles sont utilises pour les surfaces de grande prcision et les tolrances sont en
micromtre, soit 0,001mm (m)
ES et es sont les carts suprieurs, EI et ei sont les carts infrieurs.
1.3. Formules de calcul :
Cte maxi = Cte nominale + cart suprieur
Cte mini = Cte nominale + cart infrieur
Cte moyenne = (Cte maxi + cote mini ) / 2
Intervalle de tolrance( IT) = Cte maxi Cte mini
2. AJUSTEMENTS :
Ajuster 2 pices c'est emboter parfaitement ces 2 pices avec du jeu (liaison) ou du serrage
(assemblage) suivant le fonctionnement dsir.
10
+0.2
-0.1
Cte nominale
+0,2 : cart suprieur
-0,1 : cart infrieur
Tolrance
ALESAGE
ARBRE
H7 : H lettre majuscule
g6 : g lettre minuscule
Exemple :
ES = + 15 m = + 0,015mm es = - 5 m = - 0,005mm
10 H7 10 g6
EI = 0 = 0 ei = - 14 m = - 0,014mm
Chapi t re 6 - Tol rances et aj ustement
175
H7 / f7 f7
H7
Dessin densemble
Dessins de dfinition
cte tolrance de l'arbre cte tolrance de l'alsage
10 H 7 / f 7
cte nominale - position de tolrance alsage - qualit de tolrance alsage - position et qualit de tolrance arbre
2.1. Ajustements normaliss- systme ISO :
C'est par conomie que l'on a cr ces ajustements (moins doutillage de contrle). Les tolrances
sont indiques par des symboles.
2.1.1- Dsignations:
2.2. Calcul du jeu (mthode des carts) :
Cette mthode permet de ne pas avoir convertir les micromtres en millimtres.
jeu maxi = Es ei
jeu mini = Ei - es
Exemple :
Alsage Arbre
30K7 30n6
+ 6 + 28 jeu maxi = + 6 ( + 15 ) = - 9m
- 15 + 15 jeu mini = - 15 ( + 28 = - 43m
2.3. Types d'ajustements :
avec jeu incertain serr
jeu maxi + + - 0
jeu mini + 0 - -
3. TOLERANCES GEOMETRIQUES :
3.1. Etat de surface ou rugosit :
Sert indiquer au fabricant la
tolrance des dfauts infrieurs
1/100mm et la machine mettre
en oeuvre pour obtenir la surface.
3.2- Tolrances gomtriques :
Elles Indiquent au fabricant les tolrances de forme des surface et de positions de ces surfaces
entre elles afin d'obtenir un fonctionnement correct de la pice.
Ra 0,8 : rugosit en micromtre
Fraisage : mode de fabrication
UNI TE TRANSMETTRE
176
3.2.1- Emplacement des symboles :
3.2.2- Diffrents symboles :
Type de tolrance Symbole Signification
Planit
Tolrances de formes
Cylindricit
Coaxialit
Symtrie
Tolrances de positions
Localisation
Perpendicularit
//
Paralllisme
Tolrances dorientations
Z
Inclinaison
E X E R C I C E R E S O L U
On considre l'ensemble suivant:
1. Reportez les ctes tolrances sur les dessins de dfinition des arbres et alsages.
2. Dterminer les carts relatives ces cotes en micromtre et en mm ( voir tableau des carts)
3. Calculer les ctes limites et les IT pour chaque cte
4. Calculer le jeu maxi, jeu min et IT jeu et dduire le type d'ajustement
CORRIGE :
1. Voir dessin ci-dessus.
2. 14f7 : es= -16m= -0.016mm ; ei= -34m= - 0.034mm
3. 14H7 : ES= +18 m= +0.018mm ; EI= 0 m= 0mm
4.
Cotes Cote maxi Cote mini IT
14h7 14.018mm 14mm 0.018mm
14f7 13.984mm 13.966mm 0.018mm
5. Jmax=ES-ei=+0.018-(-0.034)=0.018+0.034=0.052mm
6. Jmin=EI-es=0-(-0.016)=0+0.016=0.016mm
7. Jmax et Jmin sont tous les deux positifs, donc c'est un ajustement avec jeu.
: symbole de la tolrance
0,1 : valeur de la tolrance en mm
A : surface de rfrence
1
4
f
7 1
4
H
Chapi t re 7 - Cotat i on f onct i onnel l e
177
3 6
5 2
2
5
3 2
4
3
2
4
c2
c3
c4
2
4
d2
d3
d4
4
3
3
2
CHAPITRE 7
COTATION FONCTIONNELLE
Les mcanismes sont constitus de sous-ensembles de pices assembls, ayant des tolrances, qui
font varier les jeux ncessaires lassemblage et au fonctionnement. La cotation fonctionnelle permet
partir des chanes de ctes de prvoir les liens qui existent entre jeux et dimensions tolrances.
1. DEFINITIONS :
1.1. Cte Fonctionnelle :
Il existe 2 types de ctes sur les dessins de dfinition :
- Les ctes de fabrication (contour des pices, etc.). Ce
sont des ctes peu prcises ( 1/10 prs).
- Les ctes fonctionnelles (toutes les surfaces de contact) :
tats de surface
planit, cylindricit, perpendicularit
les ctes issues des ajustements : 20 g6
Sur les dessins d'ensemble rels, toutes les pices ne vont pas
intervenir dans les chanes de ctes. Il faut obligatoirement
chercher la chane minimale de ctes.
1.2. Jeux :
Les jeux appels cte condition peuvent avoir 4 rles
possibles : le mouvement, le montage, la rsistance,
lutilisation. La reprsentation est :
1.3- Les surfaces terminales
Surfaces aboutissant lorigine et lextrmit du jeu :
- Les colorier en bleu.
- Mettre les repres des pices.
1.4- Les zones de contact
Elles sont appeles surfaces de liaison. Les zones de
contact ont la mme direction que les surfaces terminales :
- Les colorier en rouge.
- Mettre les repres des pices en contact.
1.5- Les ctes fonctionnelles :
Pour trouver les ctes fonctionnelles, il faut joindre les repres identiques :
- Les reprer : jeu C pice 3 : cte c3
- Vrifier que chaque cte est mesurable sur une seule pice.
Pour orienter les ctes, partir de lorigine du jeu et tourner dans le sens giratoire inverse du jeu.
Origine
Jeu
Extrmit
UNI TE TRANSMETTRE
178
2. METHODE POUR TRACER UNE CHAINE DE COTES :
1. Colorier en bleu et reprer les surfaces terminales.
2. Colorier en rouge et reprer les zones de contact.
3. Tracer et reprer les ctes fonctionnelles,
4. Vrifier que ce sont les ctes dune pice.
5. Orienter les ctes fonctionnelles.
Cas particuliers :
1. Deux pices l'origine ou l'extrmit du jeu :
Chercher intuitivement la pice qui ne sert pas. Ici
pices 6 et 2 lextrmit du jeu. La pice 2 ne fait
pas varier la valeur du jeu C.
2. Surface cylindrique de contact : On utilise laxe
comme surface de contact.
E X E R C I C E R E S O L U
1. Reprer et colorier en bleu les surfaces terminales.
2. Reprer et colorier en rouge les zones de contact.
3. Tracer les chanes de ctes fonctionnelles.
4. Calculer les jeux max et min de Jb et Jc.
CORRIGE :
JB = ? b3 = 18-0,1 b5 = 3-0,4 b6 = 6 0
+0,2 -0,2 +0,1
JBmaxi =
18,2 - 6 - 2,6 = 9,6mm
JBmini =
17,9 - 6,1 - 2,8 = 9mm
c7 = ? JC = 7-0,8 c2 = 5-0,1 c1 = 20-0,3
+0,5 +0,2 -0,1
JCmaxi =
c7
= 19,9 - 7,5 - 4,9 = 7,5mm
JCmini =
c7
= 19,7 - 6,2 - 5,2 = 8,3mm
b3maxi - b6mini - b5mini
b3mini - b6maxi - b5maxi
c1maxi - c2mini - c7mini
mini = c1maxi - c2mini - JCmaxi
c1mini - c2maxi - c7maxi
maxi = c1mini - c2maxi - JCmini
b3
b5
b6
c1
c2
c7
2
6
3 3
4
6
4
c6
c3
c4
f3
f5
3
5
5
3 Jeu Max = E(Cte Max positive) - E(Cte Max ngative)
Jeu Min = E(Cte Max ngative) - E(Cte Max positive)
Chapi t re 8 - Les matri aux
179
CHAPITRE 8
LES MATERIAUX
1. NOTIONS GENERALES :
Les matriaux jouent un rle capital sur le plan technologique. La russite technologique et le succs
commercial d'un produit fabriqu dpendent en grande partie du ou des matriaux choisis.
1.1. Elaboration des matriaux :
Le progrs technique a permis de produire des matriaux ; cela consiste :
- extraire des mtaux partir de minerai,
- mlanger pour fabriquer des alliages,
- mettre au point des matires plastiques synthtiques partir d'lments naturels comme le
charbon, le ptrole, le bois ou le gaz naturel,.
- concevoir des matriaux composites de plus en plus utiliss dans les industries du transport.
1.2. Classification :
1.2.1- Classification 1 :
Remarque : Les alliages base de fer constituent en masse prs de 90% de la production mondiale
de matriaux mtallique : ils sont bon march et on peut les acqurir sous formes trs varies grce
la diversit de traitements thermiques et des lments d'addition.
1.2.2- Classification 2 :
Les matriaux et alliages non ferreux
L' Aluminium et ses alliages
Le Cuivre et ses alliages
Les alliages de Zinc Les alliages de Magnsium
Les aciers sont des alliages de fer et de carbone dont
le pourcentage de carbone est infrieur 2% ; on peut
leur adjoindre d'autres lments pour en faire des
aciers allis.
Les matriaux et alliages ferreux
Les Fontes Les Aciers
Les fontes sont des alliages de fer et de
carbone dont le pourcentage de
carbone est suprieur 2%.
UNI TE TRANSMETTRE
180
1.2.3- Classification 3 :
1.2.4- Classification 4 :
1.3- Proprits :
Ce sont les caractristiques
physiques et chimiques des
matriaux utiliss qui
permettent aux objets
techniques de rsister aux
sollicitations de leur milieu
ambiant.
2. DESIGNATION DES MATERIAUX :
2.1. Les fontes :
GJL: fontes graphite lamellaire ou fontes grises
GJS: fontes graphite sphrodal
GJM: fontes mallables
Exemple: EN- GJS-400-15
400 N/mm (Mpa) de rsistance la rupture
5% d'allongement aprs rupture
EN-GJL 400-15
Rr rsistance la rupture Rr (en N/mm
Symbole
A% allongement pour cent
Prefix
Les composites
Un composite est un assemblage de deux constituants de structure diffrente. Les qualits de chacun se
compltent pour former un matriau htrogne dont les performances sont suprieures celles de ses
composants seuls. Exemples : bton arm (bton + armature acier) quipements sportifs (raquettes, ski, etc.)
1 : bton
2 : armatures aciers
Les plastiques
Les thermoplastiques
Les thermodurcissables
Ils peuvent tre ramollies par chauffage et durcies
par refroidissement. L'opration est rversible et
peut tre rpte plusieurs fois.
Ils peuvent tre transforme par la chaleur en un
tat infusible et insoluble. L'opration est
irrversible et recyclage des dchets est
impossible.
Chapi t re 8 - Les matri aux
181
2.2. Les aciers :
2.3. Alliages non ferreux:
2.3.1. Alliages d'aluminium :
2.3.2- Alliages de cuivre :
3. MISE EN UVRE DES MATERIAUX :
3.1. Procd de moulage:
3.1.1- Principe :
Le moulage est un procd qui consiste raliser une pice en
coulant du mtal en fusion (fluide) dans un moule prsentant
lempreinte (modle) de la pice obtenir. Il existe plusieurs
procds de moulage parmi lesquels, on dcrit Le moulage en
sable ;
Teneur en % des lments
D'addition
Mme indication que
pour les aciers
fortement allis. Seul
diffrence: pas de lettre
X;
[% x par 4], pour Cr - Co
- Mn - Ni - Si - W
[% x par 10], pour les
autres lments.
% de carbone
Aciers d'usage gnral
S 200
Symbole
Limite lastique RE en N/mm
Aciers fortement allis Aciers faiblement allis
X 5 Cr Ni 18-10
Symbole
Principaux
lments
d'addition
Aluminium et alliages
d'aluminium de fonderie
Exemples:
Al 99,5 : aluminium 99,5 %
Al Cu 4 Mg Ti :
Cu : cuivre
4 : 4 % de cuivre
Mg : magnsium
Ti : titane
Alliages d'aluminium corroys
Exemple:
EN AW-2017 [Al Cu 4 Mg Si] :
Al : aluminium
4 : 4 % de cuivre
Cu : cuivre
Mg : magnsium
Laiton
Exemple:
Cu ZN 15 :
Cu : cuivre
Zn : zinc
15 : 15 % de zinc
Bronze
Exemple:
Cu Sn 8 Pb P :
Cu : cuivre
Sn : tain
8 : 8 % dtain
P : phosphore
UNI TE TRANSMETTRE
182
3.1.2- Moulage en sable :
A lintrieur dun bloc de sable, on ralise une
cavit de mme forme que la pice obtenir
(empreinte). Le mtal en fusion est introduit par un
trou de coule ; aprs refroidissement, et
solidification la pice est sortie du moule.
3.2. Dformation (Formage) :
Le formage est un procd d'obtention de pice, plus ou moins complexe, par des actions
mcaniques appliques la matire. Les procds de formage sont relativement nombreux et ils se
diffrencient par le type d'action mcanique.
3.2.1. Estampage- matriage :
Le matriage est un procd qui consiste laborer une pice en obligeant, par choc ou par
pression, un lopin de matire chauff remplir une empreinte correspondant la forme de la
pice. L'ensemble mtallique dans lequel est grave l'empreinte s'appelle une matrice.
Matrice mobile
Matrice fixe
Pression
Lopin chauff
Pice matrice
Chapi t re 8 - Les matri aux
183
3.2.2. Emboutissage:
L'emboutissage consiste faire subir une
dformation permanente, par des moyens
gnralement mcaniques, une feuille de
mtal, pour obtenir une pice de surface non
dveloppable (pice creuse).
3.2- L'usinage :
L'usinage consiste amliorer formes, dimension et tat de surfaces d'une pice par enlvement de
matire (coupeau).
3.2.1- Fraisage:
Le fraisage, regroupe les oprations d'usinage pouvant
tre effectues sur une fraiseuse (figure ci-contre). Ces
oprations aboutissent l'obtention d'une gomtrie
quelconque, gnralement une forme prismatique. Pour
ce faire :
- loutil a une forme convenable ; on lui donne un
mouvement de rotation, appel "mouvement de
coupe" ;
- On le fait pntrer dans la pice usiner ;
On produit un dplacement relatif de la pice par rapport
loutil appel "mouvement davance".
En principe dans le procd du fraisage, c'est l'outil qui
tourne, la pice restant fixe dans le porte pice.
3.2.2- Tournage :
Le tournage, comme son nom l'indique, concerne un mouvement de rotation. Le tournage consiste
donc faire tourner la pice usiner autour d'un axe, qui est celui de la broche de la machine. Le
moyen de prhension peut tre un mandrin ou tout autre systme de serrage. La machine utilise
est nomme "tour". Elle permet de raliser des formes de rvolution tel que cylindres, cnes
(intrieure ou extrieur) tores et autres formes de rvolution complexes. Pour ce faire, il faut :
- Donner la pice un mouvement de rotation (mouvement de coupe) ;
- Donner loutil un mouvement de pntration et un mouvement davance.
Fraiseuse
Exemple de pice
Exemple de pice
Mandrin
Chariot Porte-outil
Poupe
Tour
Feuille
Pression
Poinon
Pice obtenue
UNI TE TRANSMETTRE
184
CHAPITRE 9
LIAISONS ET SCHEMATISATION
1. NOTION DE FONCTIONS MECANIQUES :
1.1. Fonction globale du mcanisme :
Tout systme est ralis pour remplir une fonction bien dfinie, appele fonction globale.
1.2. Fonctions techniques lmentaires :
Chaque lment d'un mcanisme possde l'une des fonctions techniques lmentaire suivantes :
- Fonction liaison : lier ou participer la liaison d'autres lments entre eux ;
- Fonction lubrification : protger les lments du mcanisme ou faciliter leurs mouvements ;
- Fonction tanchit : empcher la communication entre deux milieux diffrents.
2. FONCTION LIAISON :
On dit que deux pices sont en liaison si elles sont en contact par lintermdiaire de surface(s) ou de
point(s). Ces surfaces sont appeles surfaces fonctionnelles.
2.1. Nature des contacts :
- Contact ponctuel : La zone de contact est rduite un point.
- Contact linique : La zone de contact est rduite une ligne, pas
forcment droite.
- Contact surfacique : La zone de contact est une surface (plan,
cylindre, sphre, etc.)
2.2. Isostatisme :
Tout solide n'ayant pas de contact
avec un autre solide possde par rapport
un repre (O; x,y,z) :
- 3 translations selon les trois axes.
- 3 rotations selon les trois axes.
Il existe donc 6 mouvements lmentaires permettant de dfinir nimporte quelle combinaison de
translation et de rotation.
x
z
y
Tx
Tz
Ty
Tx : Translation le long de laxe x
Ty : Translation le long de laxe y
Tz : Translation le long de laxe z
Rx : Rotation autour de laxe x
Ry : Rotation autour de laxe y
Rz : Rotation autour de laxe z
x
z
y
Rx
Rz
Ry
Chapi t re 9 - Li ai sons et schmati sat i on
185
3.3. Degrs de libert :
- Le nombre de mouvements autoriss par une liaison est appele degr de libert et dpend de
la nature et du nombre de surfaces en contact.
- Le nombre de mouvements non autoriss par une liaison est appel degr de liaison.
- Dans une liaison on a toujours la relation :
- Les degrs de libert + Les degrs de liaison = 6
- Autrement dit : Les mouvements possibles + Les mouvements impossibles = 6
3.4. Etude des Liaisons lmentaires :
Une liaison lmentaire entre deux solides S1 et S2, est construite par contact d'une surface
gomtrique lmentaire de S1 et une surface gomtrique lmentaire de S2. Une surface
gomtrique lmentaire peut tre plane, cylindrique ou sphrique.
3.4.1- Contacts possibles :
Contact plan/plan Contact plan/cylindre Contact plan/sphre
Contact sphre/sphre Contact cylindre/cylindre Contact sphre/cylindre
3.4.2- Liaisons lmentaires :
Degrs de libert
Liaison
Translation Rotation
Symbole plan Symbole spatial Exemple
X 1 1
Y 0 1
Ponctuelle
Z 1 1
X 1 0
Y 0 0 glissire
Z 0 0
X 0 1
Y 0 0 Pivot
Z 0 0
X 1 1
Y 0 0
Pivot
Glissire
Z 0 0
X 1 1
Y 0 0 Hlicodale
Z 0 0
X 1 0
Y 1 0
Appui plan
Z 0 1
.
UNI TE TRANSMETTRE
186
X 0 0
Y 0 0
Encastrement
Z 0 0
X 0 1
Y 0 1 Rotule
Z 0 1
3. SCHEMATISATION :
Un schma est une reprsentation simplifie dun ensemble dlments
organiss en classe dquivalence qui nont aucun mouvement les uns par
rapport aux autres.
3.1. Schma technologique ou schma d'assemblage
Ce schma permet de mieux comprendre comment sont
assembles les pices d'un mcanisme. Les classes d'quivalence sont
celles lies aux mouvements lors de l'assemblage tudi.
3.2- Schma architectural ou de liaisons :
Il met en vidence la position relative des diffrentes liaisons lmentaires entre les ensembles
cinmatiquement lis dun mcanisme.
3.3- Schma cinmatique :
Un schma cinmatique est bas sur la reprsentation normalise
des liaisons usuelles. Il met en vidence les mouvements possibles
entres les classes d'quivalence.
C'est le schma le plus important, celui qui sera joint toute
explication de fonctionnement un peu complexe. Pour l'tablir on
suit les tapes suivantes :
- Quelle (s) phase (s) du fonctionnement ?
- Quelle(s) classe(s) dquivalence ?
- Quelle(s) surface(s) de contact ?
- Quel(s) mouvement(s) donc quelle liaison ?
Chapi t re 9 - Li ai sons et schmati sat i on
187
X
Y
Z
E X E R C I C E S R E S O L U S
EXERCICE N1:
Donner le schma cinmatique du mcanisme suivant :
CORRIGE :
EXERCICE N2:
On considre le dessin dun verrou ressort
- Dterminer les classes dquivalences
- Tracer le graphe de liaison
- Etablir le schma cinmatique minimal
CORRIGE :
Les classes dequivalence
A=8,9,1,3,5
B=4,7,2
C=6
Fig.4
Bti
A
B
Pivot
Pivot glissant
Pivot glissant
E1
E3
E1
E4
UNI TE TRANSMETTRE
188
CHAPITRE 10
LIAISONS ENCASTREMENTS
1. DEFINITION :
Une solution constructive dassemblage a pour fonction de lier des pices les unes aux autres, en
utilisant diffrents moyens dassemblage : par organes filets, par collage, par soudages, etc.
2. MOYENS DASSEMBLAGE DEMONTABLES :
2.1. Elments filets :
Lassemblage est considr obtenu par adhrence indirecte.
- Vis dassemblage (fig. 1) : la pice (3) seule possde un trou taraud recevant la partie filete
de la vis. les autres pices possdent un trou lisse.
- Boulon (vis + crou (fig. 2) : les pices assembler possdent un trou lisse.
- Goujon (fig. 3) : il est compos dune tige, filete ses 2 extrmits spares par une partie
lisse. le goujon (1) est implant dans la pice (5) possdant un trou taraud ; leffort de
serrage axial ncessaire au maintien en position (map) est ralise par lcrou (2).
- Vis de pression (fig. 4) : leffort de serrage ncessaire au maintien en position est exerc par
lextrmit de la vis.
2.2. Freinage des vis et ecrou :
Le freinage des vis et crou consiste s'opposer au dsserrage des vis et des crous soumis aux
chocs, vibrations, diffrences de tempratures.
2.2.1- Freinage par adhrence (scurit relative) :
Fig. 1
Fig. 3
Fig. 4 Fig. 2
Dtail :
Dtail :
Rondelle dents
Rondelle lastique (Grower)
Rondelle conique lisse (belleville)
Chapi t re 10 - Li ai sons encastrement
189
2.2.2- Freinage par obstacle(securite absolue) :
2.3- Liaison par obstacle :
Les pices qui ont une fonction dobstacle sont souvent des pices standards.
2.3.1- les goupilles :
- Goupille cylindrique : la goupille doit tre monte serre (sans jeu entre la goupille et le
perage). Cette goupille de prcision est utilise lorsque lon veut un positionnement prcis
des 2 pices lune par rapport a lautre.
- Goupille lastique : elle est maintenue dans son logement par expansion lastique. elle se
loge dans un trou brut de perage beaucoup moins onreux.
- Goupille fendue (symbole v ) et goupille cavalier : elles servent a freiner ou arrter des
axes, tiges, crous
- Goupille cannele : la ralisation de trois fentes a 120 provoquent un lger gonflement de la
matire en priphrie qui assurent le maintien en position par coincement dans le logement
cylindrique.
Ecrou auto freine (nylstop)
Contre-crou
Goupille v
Plaquettes, arrtoir ailerons
Ecrou encoches
Cl
Rondelle frein
Rondelle frein avec crou encoches
Goupille V
Goupille
cavalier
Goupille
lastique
Goupille
cylindrique
UNI TE TRANSMETTRE
190
2.3.2- Anneaux lastiques :
les anneaux lastiques (circlips) sont destins arrter en translation une pice cylindrique par
rapport a une autre :
2.4. Liaison par adherence :
- Par dformation ou pincement (fig. 1) : la liaison est assure par dformation dune des deux
pices lier.
- Par tampons tangents (fig. 2) : le rapprochement des deux tampons assure le maintien en
position (map) des pices a lier.
- Par coincement (fig. 3) : la conicit des pices lier est telle que ladhrence entre les
matriaux maintient les pices lies.
3. MOYENS DASSEMBLAGE NON DEMONTABLES (PERMANENTS) :
3.1- Liaison par rivetage :
la liaison entre deux pices minces (tles) est ralis par dformation de lextrmit dun rivet.
Cette dformation est appele rivure .
Fig. 1 Fig. 2 Fig. 3
Tampon
Pour arbres
Pour alsages
Chapi t re 10 - Li ai sons encastrement
191
3.2. Liaison par collage :
la construction colle est un mode dassemblage qui utilise les
qualits dadhrence de certaines matires synthtiques. principaux
adhsifs : polychloroprene noprne , polyamide, poxyde
araldite , silicone.
3.3- Liaison par soudage :
Le soudage consiste assembler deux ou plusieurs pices d'une faon permanente, tout en assurant
entre elles la continuit de matire soit par fusion locale des pices soit par fusion d'un autre
lment :
E X E R C I C E R E S O L U
Soit la perspective clate de l'tau suivant :
Complter le tableau suivant :
Liaison Composant et/ou procd de liaison Dmontable Indmontable
02 05 2 vis dassemblage (04) : X
01 12 1 vis de pression (13) X
08 06 Soudage . X
07 06 Goupille lastique (Freinage par obstacle de lcrou 07) X
Cordon de
soudure
UNI TE TRANSMETTRE
192
Burette
CHAPITRE 11
LUBRIFICATION - ETANCHEITE
1. LUBRIFICATION :
Elle a pour fonction globale de :
- Rduire les frottements et par suite lusure des pices.
- Evacuer la chaleur produite par le frottement.
- Protger les pices contre loxydation.
Par exemple : Dans un moteur de voiture, une bonne lubrification
augmente le rendement en rduisant les pertes mcaniques dues aux
frottements.
1.1- Types de lubrifiants :
1.1.1. Huiles :
On distingue :
Huiles vgtales ;
Huiles animales ;
Huiles minrales ;
Huiles composes ;
Huiles synthtiques.
1.1.2. Lubrifiants solides :
Graphite, soufre, talc,
mica, plomb finement
broy. Ils sont surtout
utiliss comme additifs aux
graisses.
1.1.3. Graisses :
Les graisses sont obtenues en effectuant un mlange dhuile et de savon. Pour amliorer leurs
caractristiques, on leur ajoute les lubrifiants solides.
1.2. Modes de lubrification :
1.2.1. Lubrification ponctuelle :
La premire mthode consiste mettre le lubrifiant avant le mouvement
ou durant le mouvement. Cela peut se faire de manire manuelle, par
exemple en dposant des gouttes d'huile avec une burette, en plaant de
la graisse avec les doigts (si celle-ci n'est pas toxique), etc.
1.2.2- Alimentation continue:
Il est possible d'avoir un rservoir de lubrifiant (liquide). Une pompe assure
la circulation du lubrifiant vers les parties en mouvement et le lubrifiant
retourne vers le rservoir lorsque le dispositif est l'arrt. C'est le cas
notamment de l'huile pour moteurs. On peut galement faire tremper le
dispositif dans un lubrifiant liquide, on parle alors de bain d'huile . Par
exemple une roue dente trempe dans un bain emporte par adhrence de
l'huile vers les points lubrifier.
Avantages Inconvnient
Bonne pntration entre les
lments en mouvement.
Bon refroidissement.
Contrle facile de niveau de lhuile.
Evacuation des corps trangers.
Etanchit
ncessaire.
Avantages Inconvnient
Etanchit facile
raliser.
Manipulation
Facilit
Coefficient de frottement
plus lev que celui de
lhuile.
Evacuation thermique faible.
Impossibilit de vrification
de niveau de la graisse.
Chapi t re 11 - Lubri fi cati on tanchi t
193
2. ETANCHEITE :
Elle a pour fonction globale d'empcher :
- les impurets du milieu extrieur daccder aux surfaces protger.
- Un fluide de schapper vers le milieu extrieur
Exemple : Pour un vrin pneumatique, il faut empcher lair de s'chapper et le garder propre.
2.1. Types d'tanchit :
2.1.1- Etanchit statique
Il n'y a pas de mouvement relatif entre les pices.
a. Etanchit sans joint ou directe :
Utiliss pour des produits corrosifs, des produits chauds ou de
fortes pressions.
b. Etanchit avec joint :
- Par joint plat ou circulaire qui peut tre en caoutchouc, carton, plastique ou mtallo-
plastique.
- Par joint torique
- Par soufflet qui maintient la graisse dans le mcanisme et empche les impurets de rentrer.
Exemple: joint de Cardan utilis dans une voiture
UNI TE TRANSMETTRE
194
2.2. Etanchit dynamique :
Il y a 2 mouvements possibles rotation et translation.
- Etanchit avec joint 1 ou 2 lvres pour rotation
- Autres dispositifs
E X E R C I C E R E S O L U
Compltez le tableau ci-dessous. Mettre une croix dans les colonnes (Et. dynamique et Et. statique).
CORRIGE :
Repre Type de joint Et. statique Et. dynamique Entre quelles pices
5 2 lvres X 1 et 4
6 torique X 1 et 2
7 plat X 2 et 3
8 chicane X 3 et 4
joint 2 lvres
joint 1 lvre
Coupelle pour translation
Chicanes pour rotation Rondelles Z
Chapi t re 12 - Fonct i on gui dage
195
CHAPITRE 12
FONCTION GUIDAGE
La fonction guidage en translation et en rotation reprsente la ralisation technologique
respectivement de la liaison glissire et de la liaison pivot.
1. GUIDAGE EN ROTATION :
Si lorgane de guidage permet seulement la rotation (partielle ou complte)
de la pice mobile, on parle de guidage en rotation. De nombreuses solutions
constructives permettent de raliser un mme assemblage. Elles sappuient sur
diffrents principes et mettent en uvre des technologies varies.
1.1. Guidage par contact direct (liaison directe) :
Le guidage en rotation est obtenu partir du contact entre deux
surfaces cylindriques complmentaires et de deux arrts qui suppriment
le degr de libert en translation suivant laxe des cylindres.
1.2. Guidage par des coussinets :
Un coussinet est une bague de forme cylindrique, avec ou sans
collerette. Il se monte avec serrage dans lalsage et glissant dans
larbre. Les coussinets permettent datteindre des performances bien
suprieures celles obtenues avec un contact direct entre surfaces :
- Rduction du coefficient de frottement ;
- Augmentation de la dure de vie, fonctionnement silencieux.
Les coussinets sont raliss partir de diffrents matriaux : bronze, matires
plastiques (nylon, tflon). Ils peuvent tre utiliss sec ou lubrifis. Il existe
dailleurs des coussinets autolubrifiants imprgns dhuile dans leur structure,
ayant les caractristiques suivantes:
- Une vitesse tangentielle de 8m/s, aucun entretien ;
- Temprature de fonctionnement maximale admise de 200C.
1.3. Guidage par roulement :
Pour amliorer le rendement, on remplace le
frottement de glissement par le frottement de
roulement ; lide est dinterposer entre les
surfaces cylindriques des deux pices guider des
lments roulants (billes, rouleaux, aiguilles) qui
vont augmenter aussi la qualit du guidage. Le
roulement va permettre le mouvement de rotation
tout en supportant les efforts axiaux ou radiaux
suivant le type de roulement. On va tudier
uniquement les roulements billes contact radial.
1.3.1- Constituants dun roulement :
(voir figure ci-dessus)
Bague extrieure
Elment roulant (bille)
Bague intrieure
Cage
UNI TE TRANSMETTRE
196
TOURNANT
FIXE
C
1
3
k
6
C
4
0
H
7
FIXE
TOURNANT
C
1
3
g
6
C
4
0
M
7
1.3.2. Reprsentations relles et schmatiques :
1.3.3- Montage des roulements billes contact radial :
a. Rgles de montage :
- Les bagues tournantes par rapport la direction de la charge doivent tre montes serres.
- On a 4 obstacles en translation.
- Les bagues fixes par rapport la direction de la charge doivent tre montes libres (avec du
jeu).
- On a 2 obstacles en translation sur la mme bague.
b. Arbre tournant :
- Ajustements :
Les bagues intrieures tournantes sont
montes serres :Tolrance de larbre : k6
Les bagues extrieures fixes sont montes
glissantes :Tolrance de lalsage : H7
- Arrts axiaux des bagues :
Les bagues intrieures montes srres
sont arrtes en translation par quatre
obstacles : A, B, C, D
Les bagues extrieures montes glissantes
sont arrtes en translation par deux
obstacles : E et F.
c. Alsage tournant :
- Ajustements :
Les bagues intrieures fixes sont montes
glissantes :Tolrance de larbre : g6
Les bagues extrieures tournantes sont
montes serres :Tolrance de lalsage :
M7.
- Arrts axiaux des bagues :
Les bagues intrieures montes glissantes
sont arrtes en translation par deux
obstacles : E et F
Les bagues extrieures montes srres
sont arrtes en translation par quatre
obstacles : A, B, C, D.
2. GUIDAGE EN TRANSLATION :
Si lorgane de guidage permet seulement un dplacement rectiligne de
la pice mobile, on parle de guidage en translation.
Chapi t re 12 - Fonct i on gui dage
197
2.1. Guidage par contact direct :
2.1.1. Guidage prismatique :
La gomtrie des surfaces de contact nest
pas forcment rectangulaire. Elle peut prendre
plusieurs formes. Les frottements peuvent tre
diminus par linterposition dlments anti-
friction (bronze, polyamide ou Nylon) qui
peuvent tre colls sur lune des surfaces en
frottement.
2.1.2- Guidage de type cylindrique :
La liaison glissire est ralise par
association dun contact cylindrique
(supprimant quatre degrs de libert) et dun
arrt en rotation. Larrt en rotation peut tre
ralis laide dune clavette ou de
cannelures.
2.2. guidage par lment roulant :
Il existe une grande varit dlments
roulants standards permettant de raliser une
liaison glissire. Le cot de ces lments limite
leur utilisation aux cas pour lesquels le frottement
doit tre rduit et les efforts sont importants.
E X E R C I C E R E S O L U
TOURET A MEULER
Larbre porte-meule (2) est guid en
rotation par deux roulements (3) et
(4). Rpondre aux questions suivantes :
a) Colorier lensemble des pices en
rotation
b) De quel type de roulement sagit-
il ? Roulement billes contact
radial
c) Est-ce un montage arbre ou
alsage tournant ? Arbre tournant
d) Quelles sont les bagues montes
serres (extrieures ou
intrieures) ? Bagues intrieures
e) Identifier les obstacles arrtant ces bagues axialement (A, B, C, D, E, F, G, H) : E, F, G, H
f) Les bagues extrieures sont-elles montes avec jeu ou avec serrage ? Avec serrage (glissantes)
g) Identifier les obstacles arrtant ces bagues axialement (A, B, C, D, E, F, G, H) : C, D
h) La bague extrieure du roulement (3) est-elle lie en translation avec le bti (1) (OUI ou NON) ? NON
i) Donner la tolrance des portes des bagues intrieures situes sur larbre : k6
j) Donner la tolrance des portes des bagues extrieures situes sur lalsage : H7
k) Cter les portes de roulement sur larbre (2) et sur les alsages (1) et (8)
UNI TE PROJET ENCADRE
198
UNI T Projet encadr
C O MP E T E N C E S A T T E N D UE S
Dvelopper lesprit de recherche, dinitiative, dautonomie par la construction
rflchie dun projet ;
Participer activement aux apprentissages ;
Intgrer et rutiliser des connaissances acquises en cours en associant savoirs
et savoir-faire dans un esprit cratif ou exprimental ;
Dvelopper les qualits danalyse et de synthse ncessaires la prsentation
construite et argumente du projet loral ;
Dvelopper le travail au sein dun groupe.
P R E S E N T A T I O N
Le projet encadr (PE) s'inscrit dans le cadre de la "pdagogie de projet", qui est
reconnue comme facilitatrice des processus d'apprentissage, tant sur le plan individuel que
collectif. Le projet met les lves dans des situations-problme les poussant chercher les
informations constituant les lments de rponse. Ainsi :
- Le PE est labor par les lves qui sont mis en situation de
responsabilit dans la conduite dune ralisation.
- A partir dun thme qui propose une problmatique ancre sur le
contenu du programme, les lves avec laide des enseignants,
dterminent des sujets prcis qui sarticulent sur les principaux axes
du programme ;
- Ce travail, men en petits groupes, aboutit une ralisation concrte
qui peut prendre des formes diverses, et fait lobjet, au moment de
lvaluation dune communication orale.
Cette unit traite de :
- L'analyse fonctionnelle qui offre aux lves un outil prcieux pour
dcortiquer leur projet : recenser, caractriser, et hirarchiser les
fonctions du systme objet du PE ;
- Logiciel de conception assiste par ordinateur (CAO) promouvant
l'utilisation des nouvelles technologies informatiques ;
- La prsentation de quelques directives principales pour la gestion d'un
PE, ainsi que la prsentation de quelques systmes pouvant faire
l'objet de ralisation par les lves et/ou les professeurs.
Chapi t re 1 - Anal yse fonct i onnel l e
199
CHAPITRE 1
ANALYSE FONCTIONNELLE
INTRODUCTION :
Dans la vie quotidienne, on utilise des produits qui rpondent nos
besoins. Par exemple, on utilise Le store pour satisfaire le besoin de se
protger, des rayons solaires intenses du soleil. l'analyse fonctionnelle est une
approche scientifique qui raisonne en termes de fonctions devant tre
assures par un produit : elle consiste recenser, caractriser, et hirarchiser
les fonctions d'un systme. Selon qu'on s'intresse aux fonctions de service ou
qu'on s'intresse aux fonctions techniques, on parle d'analyse fonctionnelle
externe ou interne.
1. ANALYSE FONCTIONNELLE EXTERNE :
L'analyse fonctionnelle externe, dcrit le point de vue de l'utilisateur et ne s'intresse au produit qu'en
tant que "boite noire" capable de satisfaire son besoin en fournissant des services dans son environnement.
1.1. BESOIN ET PRODUIT :
1.1.1. Dfinitions :
Le besoin est une ncessit ou un dsir prouv par un
utilisateur. Il permet de justifier lexistence dun
produit.
Un produit est ce qui est fourni un utilisateur pour
satisfaire un besoin.
- Un besoin peut tre explicite ou implicite ;
- Un produit peut tre un matriel, un service ou un processus complexe.
1.1.2. Notion de systme :
Le terme "systme" est souvent utilis la place de celui de "produit". En effet, Le concept de
systme a une signification ou connotation plus riche : il regroupe tous les types de produits
(matriel, service et processus). C'est le terme qui sera donc utilis, en gnral, dans la suite de
l'ouvrage. Il est dfini, en gnral, comme suit :
Un systme est un ensemble d'lments organis en
fonction d'un but atteindre ou pour satisfaire un
besoin.
Exemple : Micro-ordinateur
Le Micro-ordinateur est un systme :
- C'est un ensemble d'lments lis : unit centrale, cran, souris, clavier, etc. ;
- Il satisfait au besoin ou but de traiter les donns.
UNI TE PROJET ENCADRE
200
1.2. REPONSE AU BESOIN
1.2.1- Finalit dun produit :
Pour rpondre au besoin, on dfinit laction dun systme en termes de sa finalit, c'est dire en
termes de ses fonctions qui rendent service l'utilisateur. On entame alors la recherche des
fonctions devant tre assures par ce produit. Pour ce faire, on utilise des outils graphiques qui
rendent un systme plus facile assimiler.
1.2.2- Recherche et formulation du besoin : Diagramme de "Bte cornes" :
1.2.3- Recherche des fonctions de service :
a. Dfinitions :
Fonctions de service :
Les fonctions de service sont les actions attendues d'un produit pour rpondre un besoin. Une
fonction de service est caractrise par ce qui suit :
- Elle est dcrite par un verbe l'infinitif suivi d'un complment ;
- Elle peut tre une fonction :
d'usage, car elle justifie le pourquoi de l'utilisation du systme ;
d'estime, car elle concerne l'aspect d'esthtisme, de qualit, de cot, etc.
- Elle doit faire abstraction de la solution technique qui pourrait la matrialiser.
Exemple : Formulation de quelques fonctions de service d'un store automatis.
- Changer automatiquement la position d'une toile de store (fonction d'usage) ;
- S'adapter l'architecture de la faade sur laquelle il sera mont (fonction d'estime).
Fonctions techniques :
Une fonction technique reprsente une action interne au systme, pour assurer une ou des fonctions
de service ; elle est dfinie par le concepteur. On la qualifie aussi de fonction constructive, parce
quelle participe construire techniquement le systme.
Exemple : Store automatis
La toile
Habitant
d'un local
Une zone
expose
Store
automatis
Positionner la toile
automatiquement
A qui rend-il
service ?
Systme
Dans quel but le
systme existe-t-il ?
Pour noncer le besoin fondamental dun
produit, on utilise loutil ou diagramme
de "bte cornes", qui pose 3 questions
fondamentales comme l'indique la figure
ci-contre :
Sur quoi
agit-il ?
Chapi t re 1 - Anal yse fonct i onnel l e
201
b. Diagramme Pieuvre :
Dfinition :
Ce diagramme recense tous les lments de l'environnement du systme (humain, physique, etc.),
qui sont en interaction avec lui. Ce diagramme est dfini et caractris par ce qui suit. Il permet de
visualiser toutes les relations possibles du systme avec les lments de son milieu ou
environnement extrieur (humain physique, conomique et technique) ; ces relations sont en fait les
fonctions de service ; un tableau accompagnant le diagramme dcrit ces fonctions. On distingue :
Les fonctions principales (FP) : Elles crent
des relations entre plusieurs lments de
lenvironnement qui expriment les services
offerts par le systme pour satisfaire le
besoin ; dans le schma gnral, on trouve
FP1 et FP2 ;
Les fonctions contraintes (FC) : Elles
adaptent le systme un ou plusieurs
lments de son environnement. Dans le
schma gnral, on trouve FC1 et FC2. Elles
contraignent le concepteur respecter
certaines exigences de l'utilisateur, normes
de scurit, etc.
Caractrisation des fonctions de service :
La caractrisation consiste noncer pour chaque fonction de service (principale ou de contrainte)
les critres d'apprciation avec des niveaux et une certaine flexibilit. Cette opration se fait en
gnral sous forme d'un tableau, qu'on appelle "tableau fonctionnel" et qui a le format suivant :
Fonction Critre d'apprciation Niveau d'un critre d'apprciation Flexibilit d'un niveau
FP ou FC
- Critre d'apprciation d'une fonction : Caractre retenu pour apprcier la manire
dont une fonction est remplie ou une contrainte est respecte. Une chelle doit tre
utilise pour apprcier le niveau.
- Niveau d'un critre d'apprciation : Grandeur repre dans l'chelle adopte pour un
critre d'apprciation d'une fonction. Cette grandeur peut tre celle recherche en
tant qu'objectif. Elle aura des valeurs chiffres avec tolrance (dimensions,
paramtres de fonctionnement, cot, niveau sonore, etc.).
- Flexibilit d'un niveau : C'est l'ensemble des indications exprimes par le demandeur
avec des limites d'acceptation. Ces limites sont prcises sous forme de classe de
flexibilit:
Classe F0 : flexibilit nulle, niveau impratif ;
Classe F1 : flexibilit faible, niveau peu ngociable ;
Classe F2 : flexibilit moyenne, niveau ngociable ;
Classe F3 : flexibilit forte, niveau trs ngociable.
Exemple : Diagramme Pieuvre et tableau fonctionnel du Store automatis
Cet exemple permet d'illustrer la construction du diagramme Pieuvre, ainsi que la formulation des
fonctions de service dans le tableau fonctionnel accompagnant le diagramme. La caractrisation des
fonctions de service n'est pas tudie dans cet exemple pour des raisons de simplicit. On considre
que la matire d'uvre du store est la toile, donc c'est un lment extrieur.
Systme
FP1
FP2
FC1
FC2
Elment 1
Elment 2
Elment 5
Elment 4
Elment 3
UNI TE PROJET ENCADRE
202
Tableau fonctionnel
2- ANALYSE FONCTIONNELLE INTERNE :
L'analyse fonctionnelle interne, dcrit le point de vue du concepteur en charge de fournir le produit
devant rpondre au besoin de l'utilisateur. Lors de cette phase de conception, les fonctions de service ou
d'usage vont tre obtenues l'aide de fonctions techniques. Pour ce faire, on utilise une analyse
descendante ; Il s'agit d'une dmarche qui utilise des outils graphiques. Elle part de la fonction globale et
dcortique un systme pour en sortir les diffrentes fonctions lmentaires. Elle part donc du gnral
pour aboutir au particulier.
2.1- LE DIAGRAMME FAST :
Le diagramme FAST (Function Analysis System Technique) est un diagramme d'analyse fonctionnelle
des systmes techniques. Il a pour mthode d'ordonner les fonctions de service et les composer
logiquement pour aboutir aux solutions techniques de ralisation, appeles aussi solutions
constructives parce qu'elles aboutissent la construction du systme. En partant d'une fonction
principale ou de contrainte, le diagramme FAST prsente les fonctions techniques associes dans une
organisation logique rpondant aux 3 questions suivantes :
- Pourquoi cette fonction doit-elle tre assure ?
- Comment cette fonction doit-elle tre assure ?
- Quand cette fonction doit-elle tre assure ?
FONCTION DESCRIPTION
FP1 Protger contre les rayons intenses du soleil
FP2 Empcher la dtrioration du store par le vent
FP3 Prendre en compte les consignes de lutilisateur
FC1 S'adapter aux supports
FC2 Utiliser l'nergie lectrique du secteur
FC3 Rsister l'environnement
FC4 Etre d'un usage ais et esthtique
Pourquoi ?
Comment ?
Fonction
Quand ?
Fonction technique 1
Fonction technique 2
Fonction de service
Fonction technique n
ET
Fonctions ralises
en mme temps
Fonction technique 1
Fonction technique 2
Fonction technique n
Fonction de service
OU
Fonctions alternatives
possibles
FP1
FP2
FC1
FC2
FC4
FP3
FC3
L'nergie
L'utilisateur
Le milieu
ambiant
Le mur
Le soleil
La toile
Store
automatis
Vent
Chapi t re 1 - Anal yse fonct i onnel l e
203
Exemple : Diagramme FAST partiel du store automatis
2.2- DIAGRAMME SADT :
La reprsentation SADT (Structured Analysis and Design Technic) est la technique de modlisation
avec analyse structure. Elle reprend les principes prcdents du diagramme FAST, mais utilise des
rgles prcises ce qui la rend plus complexe. Le diagramme est alors un ensemble d'actigrammes ou
diagrammes d'activit. Un diagramme SADTest structur en niveaux comme suit :
5
3, 4, 7
6
1, 2
Drouler/Enrouler
Guider la toile
Limiter le
mouvement
Grer Botier de commande (1)
Moteur lectrique (3)
Relais (2)
Rducteur engrenages (4)
Rouleau (6)
Leviers articuls (5)
Capteurs de fin de
course (7)
Fonctions de service Fonctions techniques Solutions technologiques
Positionner
la toile du Store
Distribuer l'nergie
Convertir l'nergie
Adapter l'nergie
A3
A31
A32
A33
A0
A0
A1
A2
A3
A1
A11
A12
UNI TE PROJET ENCADRE
204
- L'actigramme de niveau le plus lev, not A-0 correspond la finalit ou la fonction globale du
systme ;
- Ce diagramme de niveau A-0 se dcompose en n diagrammes : A1 An ;
- Chacun des diagrammes A1 An est dcompos son tour suivant le mme principe. Dans
l'exemple ci-dessous :
A0 reprsente le niveau 0, donc la fonction globale du systme ; elle se dcompose en 2
sous-systmes A1 et A2 et A3 ;
A1 se dcompose en A12 et A12 ;
Et ainsi de suite.
- La dcomposition se termine si le niveau souhait pour atteindre l'objectif est atteint ;
- Dans chaque diagramme ou niveau, on dfinit les relations entre les sous systmes et les donnes
de contrle.
Exemple : Diagramme SADT partiel du store automatis
Communiquer
A1
Boutons
Traiter les
donne
A2
Grer
lnergie
A3
Dplacer le
store
A4
Acqurir
A5
NIVEAU A-0
Capteurs
Carte lecronique
Appareillage
P.O
NIVEAU A-0
Store en position initiale
Store en
position
finale
Informations
Lumire
Vent
Informations
Rseau 230V
Chapi t re 1 - Anal yse fonct i onnel l e
205
2.3. LE CAHIER DES CHARGES FONCTIONNEL :
2.3.1- Dfinition :
Le cahier des charges fonctionnel (CdCF) est un document contractuel par lequel le demandeur
exprime son besoin en terme de fonctions de service. Pour chacune des fonctions et des contraintes
sont dfinis des critres d'apprciation et leurs niveaux, chacun de ces niveaux tant assorti d'une
flexibilit. Il ncessite un travail en groupe, afin de tenir compte des points de vue des diffrents
intervenants concerns par le systme : l'utilisateur, le concepteur, le distributeur, etc.
D'aprs la dfinition, on remarque
que le CdCF est l'aboutissement de
l'analyse fonctionnelle :
2.3.2- Contenu du CdCF :
Le CdCF contient donc les lments suivants :
- L'expression du besoin : fonction globale ;
- La dfinition des fonctions de service (fonctions principales et fonctions contraintes) ;
- L'numration des critres d'apprciation (Satisfaction, cot, performances, scurit, etc.) ;
- Le diagramme FAST permet de dfinir les fonctions secondaires qui permettront d'affiner les
critres d'apprciation. Il sera utile de le pousser jusqu' l'apparition d'une syntaxe OU qui donne
des pistes de recherche et offre des choix.
3- STRUCTURE FONCTIONNELLE D'UN SYSTEME
Les systmes sont d'une grande varit ; on pourrait les classer ainsi :
- Classe des systmes industriels de production : Les systmes de cette classe ne sont pas
habituels l'environnement quotidien, mais ils ont une structure dont les composants sont
relativement simples : identifiables, ouverts et standard, ce qui facilite leur tude.
Exemple : Machine de remplissage et bouchage, machine de tri de pices, etc.
- Classe des systmes "grand public" : Ils font partie de l'environnement quotidien et reprsentent
la technologie actuelle, mais ils ont un degr d'intgration de fonctions un peu lev, ce qui les
rend parfois difficile tudier.
Exemple : Machine laver, Store automatique, etc.
3.1. STRUCTURE D'UN SYSTEME AUTOMATISE :
Un systme automatis est un ensemble d'quipements qui permet partir d'nergie, et de produits
bruts ou non finis, de fabriquer des produits finis ; et ce, d'une faon automatique o l'intervention
humaine est rduite au minimum, notamment pour les tches difficiles. La modlisation d'un systme
automatis permet de l'tudier d'une manire rationnelle.
3.2. Modlisation simple (Partie Oprative/Partie Commande) :
Un systme automatis est un systme boucl, qu'on peut, modliser par le schma simple suivant ;
il est alors structur autour :
- D'une Partie Oprative (PO), forme par :
Les capteurs qui reprsentent les organes d'observation du systme ;
Les actionneurs qui reprsentent les organes de puissance du systme ;
OU
Rdaction
du
CdCF
Analyse
fonctionnelle
Le besoin est traduit par
l'entreprise partir d'une
tude de march.
Le besoin est exprim par
le client qui souhaite
acqurir un produit pour
satisfaire un besoin.
UNI TE PROJET ENCADRE
206
- D'une Partie Commande (PC), qui en fonction des comptes rendus des capteurs, fait les
traitements ncessaires et donne des ordres aux actionneurs.
- D'une Interface Homme Machine (IHM) permettant l'utilisateur de configurer et superviser le
systme ; il communique avec lui grce aux moyens de dialogue (boutons, voyants, etc.).
Pour l'exemple du Store automatis :
- La PO est constitu :
Des capteurs de vent et du soleil qui observent les conditions climatiques ;
D'un moteur lectrique qui agit sur la toile, en l'enroulant ou la droulant sur un tambour.
- La PC est constitue d'un organe lectronique qui les lit les informations des capteurs, traite
ces informations et donne des ordres au moteur.
On peut remarquer, partir du schma gnral et de l'exemple du store automatis, qu'un systme
automatis met en uvre deux chanes d'oprations :
- Lune agissant sur les flux des informations, appele chane dinformation ;
- Lautre agissant sur les flux de matire et dnergie, appele chane dnergie.
3.3. Modlisation avance (Chane d'nergie/Chane d'information) :
3.3.1- Introduction :
Cette modlisation est plus rigoureuse que la premire ; elle introduit beaucoup plus de concepts ;
elle est donc plus complique. Cette modlisation est base sur la notion de chane fonctionnelle
(chane de fonctions). Pour bien l'aborder, on commence par l'analyse d'un exemple, une perceuse
automatise :
3.3.2- Tche et sous-ensemble fonctionnel :
Dans ce systme, on distingue principalement 2 soussystmes
qui concourent la ralisation de la fonction globale du systme :
- Soussystme (SE1) de serrage de la pice ;
- Soussystme (SE2) de perage de la pice ;
Chacun de ces 2 sous-systmes est appel "sous-ensemble
fonctionnel", car :
- C'est un sous-ensemble de l'ensemble du systme ;
- Il ralise une tche qui consiste en un certain nombre
d'oprations sur la matire d'uvre.
Exemple : Le SE1 a pour tche de dplacer et serrer la pice.
Pour raliser sa tche, chaque sous-ensemble fonctionnel effectue une certaine succession
d'oprations : acqurir les informations sur l'tat des capteurs, traiter ces informations et agir sur la
matire d'uvre. Cette succession d'oprations s'excute en chane de fonctions ; on parle alors de
chane fonctionnelle.
Comptes rendus
de Capteurs
Ordres vers
Actionneurs
Partie
Commande
(PC)
Partie
Oprative
(PO)
Utilisateur
(IHM)
Exemple : Store automatis
Capteurs
Electronique
IHM
PC
PO
Dcy
ps
pp
pd
VS
fr
VM
MF
Perceuse automatise
Chapi t re 1 - Anal yse fonct i onnel l e
207
3.4. CHAINE FONCTIONNELLE :
3.4.1- Dfinition :
Tout systme automatis, plus ou moins complexe, peut tre dcompos en chanes fonctionnelles.
Une chane fonctionnelle est l'ensemble des constituants organiss en vue de l'obtention d'une tche
oprative, c'est--dire d'une tche qui agit directement sur la matire d'uvre.
Exemples : Serrer une pice, percer une pice, prendre un objet, dplacer une charge, etc.
Les constituants d'une chane fonctionnelle participent :
- Soit des oprations de gestion de l'nergie (Chane d'nergie) ;
- Soit des oprations de gestion des informations (chane d'information) ;
3.4.2- Chane d'nergie/chane d'information :
On peut remarquer donc que chaque chane fonctionnelle comporte gnralement une chane
d'nergie et une chane d'information en relation comme le montre le schma fonctionnel suivant :
- Une chane dnergie constitue des fonctions :
Alimenter ;
Distribuer ;
Convertir ;
Transmettre.
- Une chane dinformation constitue des fonctions :
Acqurir ;
Traiter ;
Communiquer.
Ces fonctions sont gnriques, c'est dire qu'elles s'appliquent en principe presque tous les
systmes, notamment les systmes automatiss.
Grandeurs
physiques
mesurer
Chane dnergie
nergies
dentre
ACQUERIR TRAITER COMMUNIQUE
AGIR
Chane dinformation
Informations
destines dautres
systmes et aux
interface H/M
Ordres
Informations
issues dautres
systmes et
dInterface H/M
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTR
Matire d'uvre
en entre
Matire d' uvre
en sortie
UNI TE PROJET ENCADRE
208
3.5- Action sur la matire d'uvre (Effecteur) :
La chane d'nergie et la chane d'information concourent ensemble, harmonieusement pour "agir"
finalement sur la matire d'uvre. On appelle gnralement l'lment responsable de cette dernire
opration, "effecteur", du mot effet.
Un effecteur est l'lment terminal de la chane d'action, convertissant l'action de l'actionneur en
un effet ou une opration sur la partie oprative.
Exemples :
- Fort de perceuse pour effectuer des trous ;
- Convoyeur pour effectuer un dplacement de pice sur un tapis roulant ;
- Pince de robot pour effectuer une force de prhension sur des pices ;
- Tambour de store pour enrouler ou drouler une toile.
E X E R C I C E S R E S O L U S
EXERCICE N 1 :
Indiquer ct des fonctions gnriques les constituants correspondant, pour le systme Store
automatis.
EXERCICE N 2 :
Donner l'actigramme de la fonction globale d'une Cafetire lectrique.
EXERCICE N 3 :
Donner le diagramme Pieuvre d'une souris de micro-ordinateur, avec le tableau
fonctionnel. On considre les lments de son environnement suivants : utilisateur,
micro-ordinateur, support (meuble, etc.).
CORRIGE :
EXERCICE N 1 :
Chane dnergie
nergie
lectrique
ACQUERIR TRAITER
AGIR
Chane dinformation
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTR
Toile
Toile enroule
ou droule
Capteurs vent et
soleil, boutons
Logique cble ou
programme
Commande du
moteur
COMMUNIQUER
Alimention DC
5V et 36V
Relais Moteur DC
Engrenages,
vis crou
Tambour
Chapi t re 1 - Anal yse fonct i onnel l e
209
EXERCICE N2 :
EXERCICE N 2 :
Signalisation
Caf en poudre
dans filtre
Prparer
du caf chaud
Pertes
Cafetire lectrique
Mise en nergie
Eau dans le rservoir
Consignes utilisateur
Caf chaud prpar dans
rcipient
Tableau fonctionnel :
FONCTION DESCRIPTION
FP1 Permettre l'utilisateur de saisir, traiter, stocker des informations
FP2 Permettre l'utilisateur d'changer des informations via Internet
FC1 Utiliser l'nergie lectrique du secteur
FC2 Se poser facilement
FC3 Etre d'un usage ais et avoir une certaine esthtique
Souris
FP1
FC1
FC4
FC2
FC3
Ordinateur
Utilisateur
Energie
Support
(Tapis)
UNI TE PROJET ENCADRE
210
CHAPITRE 2
CONCEPTION ASSISTEE PAR ORDINATEUR (CAO)
INTRODUCTION
Pour passer d'une ide la solution et pour communiquer autour d'un systme, les ingnieurs et les
techniciens utilisent des nombreux outils :
- Pour dcrire le fonctionnement, ils utilisent les diagrammes, les organigrammes, le GRAFCET, etc.
- Pour dcrire une structure, ils utilisent, des dessins, des schmas, des logigrammes, etc.
Ces diffrentes types de reprsentations sont codifies et normalises ; elles ont des langages
communs. Aujourd'hui, la reprsentation normalise est faite l'aide de logiciels (CAO). Ces logiciels
existent pratiquement dans tous les domaines (lectrique, lectronique, autmatismes dessins industriel,
etc. Ci-aprs, une prsentation succincte et visuelle de certains fonctionnalits de ces logiciels. La plupart
d'entre eux permettent de dessiner des schmas, simuler, aider la ralisation, etc. :
CIRCUIT IMPRIME
On remarque dans cette figure la possibilit de raliser le
typon du circuit imprim ainsi que le plan dimplantation des
composants.
SCHEMAS ELECTRIQUES
On remarque dans cette figure la possibilit de saisir
le schma et simuler un circuit lectrique, mettant
en uvre le dmarrage d'un moteur 2 sens :
SCHEMAS ELECTRONIQUES
On remarque dans cette figure la possibilit de saisir
le schma et simuler un circuit lectronique
numrique, mettant en uvre un compteur, auquel
on ajoute les gnrateurs des signaux et l'analyseur
logique (une sorte d'oscilloscope), etc.
Chapi t re 3 - Proj et encadr - Di recti ves
211
CHAPITRE 3
PROJET ENCADRE : DIRECTIVES
INTRODUCTION :
C'est une prsentation de quelques directives propos du projet PE. Les directives en question n'ont
pas pour rle, de dire la lettre ce qui devrait tre fait dans ce processus complexe, mais plutt de
donner un fil directeur figurant dans quelques principes et conduites parmi beaucoup d'autres, largement
admises aussi bien dans les milieux industriels que dans les milieux ducatifs. Il s'agit donc de proposer :
- Une organisation pour grer un PSE ;
- Quelques thmes pour PSE.
1. DIRECTIVES :
1.1. Activits des lves :
Dans le cadre du PE, la production attendue des lves devrait faire principalement appel des
savoirs et savoir-faire dj abords dans les diffrents cycles cours, travaux dirigs et travaux
pratiques, pour leur donner du sens et ventuellement les renforcer et les consolider. Lorganisation et
le droulement des activits privilgient :
- La crativit ;
- Linitiative et
- Le travail de groupe avec ses contraintes de rpartition des tches, de communication et
de synchronisation.
Les lves mnent leurs activits partir :
- Du dossier technique et de tout ou partie relative un produit existant dans le laboratoire ;
- De bases de donnes accessibles (catalogues, bases documentaires informatises,
bibliothques de composants, sites Internet, etc.) ;
- Dune ventuelle visite dentreprise.
1.2. Organisation :
La russite d'un PE impose :
- Dy penser longtemps lavance ;
- Une adhsion des lves ;
- Une adhsion des professeurs ;
- Un choix judicieux des PEs ;
- Une valuation formative et sommative.
On discute ci-aprs les 2 derniers points, vu leur poids dans cette dmarche.
1.3. Choix d'un PE :
Le choix d'un thme pour un PE n'est pas chose facile, puisqu'il faut tenir compte simultanment de
plusieurs facteurs intervenant dans cette dmarche. On cite, entre autres, les facteurs les plus
influents :
- L'lve en premier lieu, car il est le centre du systme ducatif ;
- Les programmes avec une synergie de toutes les disciplines possibles, impliquant ainsi
l'quipe pdagogique ; ce propos, il faut opter pour la simplicit et l'efficacit ;
- Le besoin qui doit tre justifi ;
- Le temps dont la gestion est d'une grande importance pour mener terme le projet ;
UNI TE PROJET ENCADRE
212
1.4. Evaluation d'un PE :
Lvaluation devrait se faire :
- D'une faon formative sous forme d'un suivi rgulier :
Au cours des phases du projet par une aide individuelle et collective (groupe) ;
En fin de recherches de solutions ;
- D'une faon sommative la fin du PE ; elle devrait porter sur :
Le travail crit (rapport ou mmoire) contenant les diffrents dossiers ;
L'expos devant un jury, occasion privilgie pour valuer les capacits de
communication et expression des lves.
2. EXEMPLES DE PROPOSITIONS DE PE :
On donne titre d'exemple quelques ides pour PE, dans un esprit d'quipe comme le montre la figure
ci-dessous. Pour un projet donn qui est sens tre pluritechnique, on forme des groupes dont chacun est
charg d'une tche tout en communicant avec les autre groupes aussi bien pour coordonner les tches,
que pour contribuer modestement avec eux ; ce processus est mutuel :
Ils peuvent aboutir des ralisations autonomes ou des amliorations de systmes existants :
- Ralisation de partie commande d'une perceuse automatise :
Utilisation des modules d'tape ;
Utilisation d'API :
GRAFCET de marche automatique ;
GRAFCET de marche manuelle ;
- Ralisation de partie commande d'un essuie-glace base du circuit NE555 pour :
Grande vitesse ;
Petite vitesse ;
Trs petite vitesse avec le temps de balayage trs infrieur au temps de repos ;
- Ralisation de circuit de commande simple pour positionneur d'antenne parabolique,
avec logique cble (Capteur ILS, Compteur, comparateur, roue codeuse, etc.).
- Ralisation de circuit de commande simple pour systme de contrle d'axe comme pour le
positionneur d'antenne, avec logique cble (Codeur optique incrmental, compteur,
comparateur, roue codeuse, etc.).
- Ralisation de partie commande d'un Portail automatis :
Utilisation des modules d'tape ;
Utilisation d'API ;
Utilisation d'une tlcommande pour autoriser l'accs au portail, du genre
tlcommande pour voiture, etc.
- Ralisation d'une maquette pour feux de carrefour dans un esprit de groupe :
Un groupe tudie la solution par API :GRAFCET pour fonctionnement de jour et de
nuit (jaune clignant) ;
Un groupe tudie la solution cble base de compteur et logique de commande.
Groupe 1
Aspect matriel (Mcanique)
Groupe 2
Aspect matriel (Electrique)
Groupe 3
Aspect logiciel (Programmation)
Groupe 4
Aspect documentaire
(Rapport du PE)
Travail dans l'esprit
de groupe
(Communication)
PE
Chapi t re 3 - Proj et encadr - Di recti ves
213
3. EXEMPLES DE SYSTEMES
C'est une prsentation pdagogique de quelques systmes-support typiques, largement connus et diffuss
dans les domaines industriel et "grand public". Ils permettent d'offrir des situations didactiques o les lves
peuvent faire des activits pratiques diverses.
SYSTEME 1 STORE AUTOMATISE
INTRODUCTION
La manipulation journalire des stores est fastidieuse. De plus en cas d'absence de l'oprateur, le store peut
se dtriorer lors d'une rafale de vent. La commande automatique permet par l'information des capteurs de
vent et du soleil une utilisation rationnelle et fiable du store.
ACTIVITES PROPOSEES
Analyse fonctionnelle Chane d'nergie Chane d'information
Fonction globale du systme ;
Fonctions de service
(Diagramme de pieuvre) ;
Fonctions techniques
(Diagramme FAST et SADT)
Montage/Dmontage ;
Etude de la commande du moteur du store ;
Etude des liaisons, en particulier la liaison
pivot trs prsente dans ce systme ;
Reprsentation 3D des engrenage de
rduction de vitesse du moteur et
animation ;
Reprsentation 2D ;
Commande par logique
cble combinatoire ;
Commande par API.
SYSTEME 2 PORTAIL AUTOMATISE
INTRODUCTION
L'ouverture ou la fermeture d'un portail d'une proprit prive peut tre particulirement contraignante :
portail lourd manuvrer, pluie, passage de vhicules, etc. L'ouvre portail automatis doit donc
permettre de rduire voire d'liminer ces contraintes d'utilisation. Pour simplifier l'tude, celle-ci devrait
donc porter sur un systme constitu d'une partie commande et d'une seule partie oprative (un battant).
ACTIVITES PROPOSEES
Analyse fonctionnelle Chane d'nergie Chane d'information
Fonction globale du systme ;
Fonctions de service
(Diagramme de pieuvre) ;
Fonctions techniques
(Diagramme FAST et SADT)
Montage/Dmontage ;
Etude de la commande du moteur du portail ;
Etude des liaisons, en particulier les liaisons
pivot et complte trs prsente dans ce
systme ;
Reprsentation 3D du bras et animation ;
Reprsentation 2D du bras ;
Etude des capteurs ;
Commande par
modules d'tapes ;
Commande par API ;
Systme
Systme
Un battant
Systme rel
Systme didactis
UNI TE PROJET ENCADRE
214
SYSTEME 3 PERCEUSE AUTOMATISE
INTRODUCTION
Le systme permet de percer un trou dans une pice
d'une faon automatis. Dans ce systme, on
distingue 3 sousensembles fonctionnels qui
concourent la ralisation de la fonction globale du
systme :
- Sousensemble de serrage de la pice ;
- Sousensemble de perage de la pice ;
- Sousensemble d'vacuation de la pice.
ACTIVITES PROPOSEES
Analyse fonctionnelle Chane d'nergie Chane d'information
Fonction globale du systme ;
Fonctions de service
(Diagramme de pieuvre) ;
Fonctions techniques
(Diagramme FAST et SADT)
Montage/Dmontage ;
Etude des distributeurs et vernis
pneumatiques ;
Etude des liaisons, en particulier la liaison
glissire trs prsente dans ce systme ;
Reprsentation 3D de la mini perceuse et
animation ;
Reprsentation 2D de la colonne ;
Commande par
modules d'tapes ;
Commande par API ;
Etude des capteurs.
SYSTEME 4 POSITIONNEUR D'ANTENNE PARABOLIQUE
INTRODUCTION
Si lon veut recevoir les programmes en provenance de plusieurs satellites,
la parabole et sa tte de lecture doivent pouvoir tre orientEs vers chaque
satellite situ sur la partie darc de lorbite gostationnaire visible du lieu
dinstallation.
Cette orientation se fait par rotation de la parabole autour dun axe
perpendiculaire au plan de lquateur (axe parallle laxe de rotation de la
terre), ce qui est assur par le positionneur de parabole.
ACTIVITES PROPOSEES
Analyse fonctionnelle Chane d'nergie Chane d'information
Fonction globale du systme ;
Fonctions de service
(Diagramme de pieuvre) ;
Fonctions techniques
(Diagramme FAST et SADT)
Montage/Dmontage ;
Etude de la commande du moteur du
positionneur ;
Etude des liaisons, en particulier les liaison
pivot et glissire trs prsentes dans ce
systme ;
Reprsentation 3D du mcanisme
d'orientation et animation ;
Reprsentation 2D de
la pice de serrage ;
Commande par logique
cble.
Etude du capteur ILS.
Systme didactis
Chapi t re 3 - Proj et encadr - Di recti ves
215
SYSTEME 5 ESSUIE-GLACE
INTRODUCTION
Le systme permet d'amliorer la visibilit d'un pare-brise. Il assure les fonctions suivantes :
- balayage (essuyage) du pare-brise avec diffrentes
vitesses et lavage du pare-brise;
- Toutes ces fonctions sont gres par un module
lectronique qui reoit des informations des
commandes (interrupteurs, boutons poussoirs, etc.)
et des diffrents capteurs situs dans le vhicule. On
note en particulier le capteur qui indique si le
systme est revenu sa position initiale. Aprs
traitement de ces informations, le module
lectronique pilote le moteur d'essuie-glace.
ACTIVITES PROPOSEES
Analyse fonctionnelle Chane d'nergie Chane d'information
Fonction globale du systme ;
Fonctions de service
(Diagramme de pieuvre) ;
Fonctions techniques
(Diagramme FAST et SADT)
Montage/Dmontage ;
Etude de la commande du moteur ;
Etude des liaisons, en particulier les liaisons
pivot et rotule trs prsentes dans ce
systme ;
Reprsentation 3D du systme bielle-
manivelle et animation ;
Reprsentation D de la bielle ;
Commande par logique
cble base du
circuit NE 555 (par
exemple) ;
Etude de capteurs.
[1] F. BENIELLI et al. Technologie des systmes automatiss. Foucher, Paris, 1994.
[2] R. GOURANT et al.Initiation aux sciences de l'ingnieur. Hachette, Paris, 2001.
[3] C. BRYSELBOUT et al. Sciences de l'ingnieur, premire S. Foucher, Paris, 2003.
[4] C. BRYSELBOUT et al. Sciences de l'ingnieur, Terminale S. Foucher, Paris, 2003.
[5] C.BARLIER et al. Construction mcanique industrielle. Foucher, Paris, 1993.
[6] R. BOURGEOIS et al. Electrotechnique automatique et informatique industrielle. Foucher, Paris, 1995.
[7] I. RAK et al. La dmarche de projet industriel. Foucher, Paris 1992.
[8] Marcel Gindre et al. Electronique Numrique logique combinatoire, McGraw-Hill, Paris, 1987.
[8] Marcel Gindre et al. Electronique Numrique logique squentielle, McGraw-Hill, Paris, 1987.
[9] M. DARBELET et al. Economie d'entreprise, Foucher, Paris, 1993.
[10] M. LANGLOIS. Gestion et informatique, DELAGRAVE, Toulouse, 1993.
[11] J.C. BOSSY et D. MERAT. Automatisme appliqu, Castella, Paris, 1985
[12] J.C. LAFONT et J.P. VABRE. Cours et problme dlectronique numrique, Ellipse, Paris, 1986.
[13] J. LOHIER et D. PRESENT. Transmission et rseaux, Dunod, Paris, 1999.
[14] Diffrents sites WEB
Systme ReL
BI BLI OGRAPHI E
216
I NDEX
A
Additionneur 96
Ajustement 174
Alimentation stabilise 20
Amplification 69
Anneaux lastiques 190
AOP 70
Arithmtique binaire 81
Automate programmable 140
B
Bascules 104
Besoin 199
C
Cahier des charges 205
Capteurs 61
caractristiques 62
numriques 66
photolectriques 64
TOR 62
Cartouche 158
Centrale 12
Chaine fonctionnelle 207
Circuit imprim 210
Circuits logiques programmables
127
Code
ASCII 80
BCD 80
binaire 79
GRAY 79
Comparateur 98
Compteurs 107
Contacteur 32
Ctation 168
Ctation fonctionnelle 177
Coupe et hachures 164
Courant lectrique 17
Coussinet 195
D
Dcodeur 92
Dmultiplexeur 95
Dessin industriel 157
Diagramme pieuvre 201
Distributeur 41
Diviseur
courant 20
tension 19
E
Electrolyse 57
Energie
lectrique 11
pneumatique 27
nergie lectrique 11, 12, 13,
14, 16, 33, 35, 46, 56, 57, 202
Esquisse 170
Etanchit 193
F
Famille logique 117
caratristiques 118
tages de sortie 120
FAST 202
Filetage 166
Frquence 20
Fusible 34
G
Goupilles 189
GRAFCET 132
H
Hacheur srie 37
I
Intersections 161
Isolation galvanique 75
L
LADDER 142
Lampes 56
Liaison
parallle 151
srie 151
Liaisons 184
Liste d'instructions 143
Loi d'Ohm 17
Lubrificaion 192
M
Machine courant continu 46
principe 47
modle 48
Matriaux
classification 179
dsignation 180
Mmoire
Notion 102
principe 112
types 112
Mise en forme 71
Modeleur volumique 170
Multiplexeur 94
N
NE 555 124
Nomenclature 159
O
Oprateurs booleens 83
P
PAL 128
Perspective cavalire 162
Projection et vue 162
Puissance 20
R
Registres 110
Relais 30
Rsistance 17
Rsistance de chauffage 57
Rivetage 190
Roulement 195
RS232 152
RS485 153
S
SADT 203
Section 165
Sectionneur 33
Scurit 24
SFC 143
Source d'nergie 15
Systme 199
Systme de numration 78
T
Table de vrit 87
Tableau de KARNAUGH 89
Tolrances 174
Tournage 183
Tracs gometriques 160
V
Variateur de vitesse 39
Verin 52
Vis et ecrou 188
Vous aimerez peut-être aussi
- Guide Du Dessinateur Industriel - ChevalierDocument338 pagesGuide Du Dessinateur Industriel - Chevaliersimoniko89% (148)
- Corrige Exercice Recherche OperationnelleDocument15 pagesCorrige Exercice Recherche OperationnelleAimad El-mesafy100% (2)
- Dossier de Conception. Conception D Un Site E-LearningDocument18 pagesDossier de Conception. Conception D Un Site E-Learningmilbo milboPas encore d'évaluation
- TOG Series F4Document64 pagesTOG Series F4Ahmed Savadogo100% (2)
- TMEL - Automatisme SchémaDocument4 pagesTMEL - Automatisme SchémaAina RATSIMBAZAFYPas encore d'évaluation
- Logique CombinatoireDocument136 pagesLogique Combinatoiretahourahmed0% (1)
- TD 2015Document24 pagesTD 2015Hary Yoskovich100% (1)
- Marketing Mix THE GLOW C 4GC2Document1 pageMarketing Mix THE GLOW C 4GC2Ahmed. Touati GCPas encore d'évaluation
- 1.1 - Analyse Des Parties PrenantesDocument8 pages1.1 - Analyse Des Parties PrenantesMohamed Boutoumi100% (1)
- Stratégie Et Contrôle de GestionDocument18 pagesStratégie Et Contrôle de Gestionbabayou100% (2)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1Pas encore d'évaluation
- FanchonDocument642 pagesFanchonThomas Bartmobile50% (6)
- Freinage DynamiqueDocument12 pagesFreinage Dynamiqueramzi2521Pas encore d'évaluation
- Pierre Borne Automatique 4, Analyse Et Régulation Des ProcessusDocument495 pagesPierre Borne Automatique 4, Analyse Et Régulation Des Processuslouizini abderahmanePas encore d'évaluation
- Cours Électricité de Bord I 1MTEMDocument114 pagesCours Électricité de Bord I 1MTEMوليد المبروك100% (1)
- Technologie GeneraleDocument117 pagesTechnologie Generaleelectroblida100% (9)
- Thyristor Et DiodeDocument10 pagesThyristor Et DiodesakridjPas encore d'évaluation
- TD Api GsiDocument4 pagesTD Api Gsikhawlaaaa100% (1)
- TP Fonctions Électroniques 08 09Document7 pagesTP Fonctions Électroniques 08 09anis_ben_aicha5483Pas encore d'évaluation
- Cour VHDL Amami 5 - 2016 PDFDocument71 pagesCour VHDL Amami 5 - 2016 PDFmedPas encore d'évaluation
- Convertisseur Numérique-AnalogiqueDocument5 pagesConvertisseur Numérique-Analogiqueben boubakerPas encore d'évaluation
- EolienneDocument17 pagesEolienneYassine LakhalPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- GRAFCETDocument19 pagesGRAFCETМхамед Аит Абдерахман100% (2)
- Copie 0Document84 pagesCopie 0Ibtihel Mechleoui100% (1)
- Mecanisme À CameDocument14 pagesMecanisme À CameSabrine ChahbiPas encore d'évaluation
- V11Document8 pagesV11mohammed EL HADDADPas encore d'évaluation
- Programmation Des API Cours GoodDocument10 pagesProgrammation Des API Cours GoodZakaryae HabibPas encore d'évaluation
- Electronique de Commutation PDFDocument42 pagesElectronique de Commutation PDFbouchraPas encore d'évaluation
- PDF Manuel Dx27activite Bac Elect DDDocument194 pagesPDF Manuel Dx27activite Bac Elect DDBachiro Mohamed OuedraogoPas encore d'évaluation
- DSC1 2ste Atc 2016 2017 Lavage Automatique de VehiculesDocument8 pagesDSC1 2ste Atc 2016 2017 Lavage Automatique de Vehiculesismail elmoufakir100% (3)
- Logique SéquentielleDocument19 pagesLogique SéquentielleBader KassamePas encore d'évaluation
- 9 8 TD 4 Sujet PDFDocument5 pages9 8 TD 4 Sujet PDFDivin MakitaPas encore d'évaluation
- Cours MS PDFDocument100 pagesCours MS PDFGelase100% (1)
- Etude Des Systemes Techniques IndustrielsDocument28 pagesEtude Des Systemes Techniques IndustrielsLaurent Mondon100% (1)
- Cours Electrique 4ST PDFDocument240 pagesCours Electrique 4ST PDFYahyaMoummou0% (1)
- Lecture D'un Dessin D'EnsembleDocument3 pagesLecture D'un Dessin D'EnsembleYoussef SadkPas encore d'évaluation
- Mini ProjetDocument13 pagesMini ProjetHoussine Gue100% (3)
- M21 Logique Combinatoire GE EMIDocument0 pageM21 Logique Combinatoire GE EMIWalid Prince100% (1)
- Asservissement (Modilisation)Document71 pagesAsservissement (Modilisation)Chahra NarimanPas encore d'évaluation
- DM2 TransPuissance PDFDocument3 pagesDM2 TransPuissance PDFMalek BallegiPas encore d'évaluation
- Cours GRAFCETDocument66 pagesCours GRAFCETMohamed El Hadi Redjaimia100% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Le Big Bang: Une Théorie Basée sur une Physique Invalide et des Mathématiques Erronées.D'EverandLe Big Bang: Une Théorie Basée sur une Physique Invalide et des Mathématiques Erronées.Pas encore d'évaluation
- Voiture Autonome: Résoudre le besoin d'auto-conduite complet en résolvant l'intelligence artificielle du monde réelD'EverandVoiture Autonome: Résoudre le besoin d'auto-conduite complet en résolvant l'intelligence artificielle du monde réelPas encore d'évaluation
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesD'EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesÉvaluation : 2 sur 5 étoiles2/5 (1)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Arduino | Pas à pas: Le guide ultime du débutantD'EverandArduino | Pas à pas: Le guide ultime du débutantPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Chaine D'énergieDocument11 pagesChaine D'énergieMehdi BKPas encore d'évaluation
- Programmes Cycle Ingénieur ÉlectromécanicienDocument28 pagesProgrammes Cycle Ingénieur ÉlectromécanicienIKOULHOU BOUKA GRÂCE ARSONPas encore d'évaluation
- Seq Poubelle ConnecteeDocument3 pagesSeq Poubelle ConnecteeKaled MRASSIPas encore d'évaluation
- Mémoire Master ISEDocument35 pagesMémoire Master ISEAll Tote BagsPas encore d'évaluation
- Deroulement SequenceDocument9 pagesDeroulement SequenceMehdi BKPas encore d'évaluation
- 00 2SM B Complet - p1 p166Document171 pages00 2SM B Complet - p1 p166Wolf MrPas encore d'évaluation
- Demarche Projet en Stidd QuadricoptereDocument11 pagesDemarche Projet en Stidd Quadricopteremechernene_aek9037100% (1)
- Rapport de Fin D'etude Etude Conception D'un Journal LumineuxDocument44 pagesRapport de Fin D'etude Etude Conception D'un Journal LumineuxElamrani Valerie Amine93% (14)
- Maquette - Didactique AOPDocument48 pagesMaquette - Didactique AOPFatim zahra Rida100% (1)
- Activités Pour Le Cycle Terminal STI2D: Analyse Fonctionnelle de La Cafetière P. 3Document25 pagesActivités Pour Le Cycle Terminal STI2D: Analyse Fonctionnelle de La Cafetière P. 3ELFPas encore d'évaluation
- 1 SemaineDocument14 pages1 Semainesamir ghebouliPas encore d'évaluation
- Correction Du Cahier 1AS - 2021 PDF PDF Dessin Technique Vis de Fixation PDFDocument1 pageCorrection Du Cahier 1AS - 2021 PDF PDF Dessin Technique Vis de Fixation PDFaouatef ameurPas encore d'évaluation
- Telecommande Jan99Document17 pagesTelecommande Jan99simonikoPas encore d'évaluation
- ElectroniqueDocument65 pagesElectroniquedjazair90% (10)
- College Technologie Ressources 114166Document34 pagesCollege Technologie Ressources 114166simoniko100% (1)
- TP Energie SolaireDocument45 pagesTP Energie SolaireDomingo Ben100% (2)
- Ana 35Document19 pagesAna 35Smail RCAPas encore d'évaluation
- Mon Rapport de StageDocument35 pagesMon Rapport de StageLariani Chayma83% (6)
- Chapitre 01 IntroductionDocument14 pagesChapitre 01 IntroductionLilostixh VRPas encore d'évaluation
- L'Intégration de La Responsabilité Sociale Dans L'entrepriseDocument26 pagesL'Intégration de La Responsabilité Sociale Dans L'entrepriseabderrrassoul100% (2)
- 19 Pilote AutomatiqueDocument8 pages19 Pilote AutomatiqueAbdoulrazack NaguibPas encore d'évaluation
- Joseph Le Gras L Extravagante Personnalite de Jacques CasanovaDocument313 pagesJoseph Le Gras L Extravagante Personnalite de Jacques CasanovaHoly Santa100% (1)
- FR-TRA-01 - FinalDocument58 pagesFR-TRA-01 - FinalGhasston MradPas encore d'évaluation
- Big-Data-Et Optimisation de La ClientDocument14 pagesBig-Data-Et Optimisation de La ClientKehi Tryphène KpanPas encore d'évaluation
- Modules Étude Du Multiplexage: DTM-MUX8000Document26 pagesModules Étude Du Multiplexage: DTM-MUX8000hakim dhaouadiPas encore d'évaluation
- N.T. 6523aDocument10 pagesN.T. 6523aEric VollereauPas encore d'évaluation
- Projet de Fin D'étude. Filière Licence: SMP S6 FSSM: Etude de La Consommation de L'énergie Électrique A La FSSMDocument40 pagesProjet de Fin D'étude. Filière Licence: SMP S6 FSSM: Etude de La Consommation de L'énergie Électrique A La FSSMTAOUFIK MACHTALAYPas encore d'évaluation
- Olympiades Nationales de La Chimie - Annales Vol. 2Document296 pagesOlympiades Nationales de La Chimie - Annales Vol. 2Olympiades_Chimie100% (7)
- Correction de La Série 1 2022-23Document51 pagesCorrection de La Série 1 2022-23Achraf BoulifPas encore d'évaluation
- Cc3 Equations Aux Dérivées Partielles EDPDocument17 pagesCc3 Equations Aux Dérivées Partielles EDPHadjer zitPas encore d'évaluation
- Chapitre 3 Manipulation Classes ObjetsDocument28 pagesChapitre 3 Manipulation Classes ObjetsurbainrythmePas encore d'évaluation
- Marketing RelationnelDocument18 pagesMarketing RelationnelLamziouaq ZakariaPas encore d'évaluation
- A La Decouverte de TurtleDocument74 pagesA La Decouverte de Turtlesomaben26Pas encore d'évaluation
- 2 Bac PC SVT 22Document1 page2 Bac PC SVT 22kasmirayyane0Pas encore d'évaluation
- FacebookDocument7 pagesFacebookMed Hedi MestiriPas encore d'évaluation
- Fiche Création Missionnaire 2022 PDFDocument1 pageFiche Création Missionnaire 2022 PDFNelly Christelle AssénatPas encore d'évaluation
- AMA 10 06 FOYERS TYPES Dans Faux PlafondsDocument4 pagesAMA 10 06 FOYERS TYPES Dans Faux PlafondsSemouDioufPas encore d'évaluation
- Poly OptiqueDocument58 pagesPoly Optiquejustine.rayssacPas encore d'évaluation
- Rapport Atelier Avec Les Parties Prenantes - VFDocument5 pagesRapport Atelier Avec Les Parties Prenantes - VFNBanan OUATTARAPas encore d'évaluation
- TP6 CorrectionDocument3 pagesTP6 CorrectionPROF PROF100% (1)