Vous aimerez peut-être aussi
- Introduction A L-Electronique AnalogiqueDocument258 pagesIntroduction A L-Electronique AnalogiqueHajar Berrada89% (9)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Cours Methodes de La MaintenanceDocument33 pagesCours Methodes de La Maintenancekim100% (1)
- François Graner - 30 Problèmes de Physique - Problèmes Corrigés-Dunod (2008)Document297 pagesFrançois Graner - 30 Problèmes de Physique - Problèmes Corrigés-Dunod (2008)cfisicaster100% (1)
- Livre Exercices Instrumentation 2011Document185 pagesLivre Exercices Instrumentation 2011Lotfi Beji100% (8)
- Hexagon Metrology Pocket Catalog - FR PDFDocument120 pagesHexagon Metrology Pocket Catalog - FR PDFkimPas encore d'évaluation
- Thermique Du BâtimentDocument68 pagesThermique Du BâtimentMouhcine MouhcinovichPas encore d'évaluation
- DS1 ECAM3aDocument4 pagesDS1 ECAM3aQuentin MoalPas encore d'évaluation
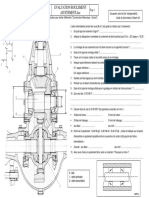
- Evaluation Roulement AjustementDocument1 pageEvaluation Roulement AjustementElla Kabongo100% (2)
- DS2 PDFDocument8 pagesDS2 PDFAbdelilah Elmesbahi100% (1)
- AssemblagesDocument7 pagesAssemblagesAdouni ZakPas encore d'évaluation
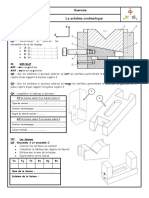
- 3 1 4 Schema CinematiqueDocument1 page3 1 4 Schema Cinematiquehitachi hadiPas encore d'évaluation
- TCM Cours GIM 1 ZINE PDFDocument64 pagesTCM Cours GIM 1 ZINE PDFAbdelmajid AittalebPas encore d'évaluation
- Modelisation Des Liaisons: MécaniqueDocument15 pagesModelisation Des Liaisons: MécaniqueSimo StitPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- TD1 Conception Mécanique 3 AU2020-2021 Version EtuDocument18 pagesTD1 Conception Mécanique 3 AU2020-2021 Version EtuManel SelmiPas encore d'évaluation
- Evaluation N°5 (Corrigé)Document8 pagesEvaluation N°5 (Corrigé)Wagih MrassiPas encore d'évaluation
- Logique CombinatoireDocument133 pagesLogique Combinatoirekim0% (1)
- Mémoire Regulation Alternateur PDFDocument94 pagesMémoire Regulation Alternateur PDFYassine Askri100% (1)
- Etude Du BalconDocument10 pagesEtude Du BalconDINA INTPas encore d'évaluation
- Examen de Conception Mecanique 2009 CorrigeDocument16 pagesExamen de Conception Mecanique 2009 Corrigebhsbhs19Pas encore d'évaluation
- Dessin D'ensDocument27 pagesDessin D'ensIsrae El AmriPas encore d'évaluation
- Mecanismes PDFDocument34 pagesMecanismes PDFesloch50% (2)
- Schéma Cinématique - 2020Document4 pagesSchéma Cinématique - 2020Mohsen Laabidi0% (1)
- Modelisation Des Mecanismes1Document23 pagesModelisation Des Mecanismes1Kamel BousninaPas encore d'évaluation
- FabricationMecaniqueS4LicenceGM PDFDocument64 pagesFabricationMecaniqueS4LicenceGM PDFImap FinnPas encore d'évaluation
- Liaisons Et Assemblage de Pieces Mecaniques Guidage en RotationDocument10 pagesLiaisons Et Assemblage de Pieces Mecaniques Guidage en RotationKhalil ChhataPas encore d'évaluation
- Liaison & Schématisation (Schéma Cinématique)Document14 pagesLiaison & Schématisation (Schéma Cinématique)Ben Saber RahiimPas encore d'évaluation
- TP2 CAO Croix de MalteDocument12 pagesTP2 CAO Croix de MalteKamel BousninaPas encore d'évaluation
- Sujet Mai-2018 - Poste de Perçage Automatique PDFDocument19 pagesSujet Mai-2018 - Poste de Perçage Automatique PDFdiassaPas encore d'évaluation
- Etude de L'isostatismeDocument7 pagesEtude de L'isostatismekamal belkacemPas encore d'évaluation
- Le Schema CinematiqueDocument3 pagesLe Schema Cinematiqueiraoui jamal (Ebay)0% (2)
- Chapitre 3 - Liaisons Complètes DémontablesDocument13 pagesChapitre 3 - Liaisons Complètes DémontablesahidouriPas encore d'évaluation
- 03 Cours Le Schema CinematiqueDocument7 pages03 Cours Le Schema CinematiqueMohammed El azhariPas encore d'évaluation
- TD N°3 PFS AnalytiqueDocument6 pagesTD N°3 PFS AnalytiqueRoubaPas encore d'évaluation
- FormualireDocument5 pagesFormualireAdil Hassani IdrissiPas encore d'évaluation
- TD 1 LiaisonsschmacinmatiqueDocument6 pagesTD 1 LiaisonsschmacinmatiqueSamba SallPas encore d'évaluation
- Technique CCCDocument15 pagesTechnique CCCNÖÚ HÄPas encore d'évaluation
- Liaison EncastrementDocument9 pagesLiaison Encastrementsaded05Pas encore d'évaluation
- COURS Conception Systeme MécaniqueDocument22 pagesCOURS Conception Systeme MécaniqueAymen KhalfaouiPas encore d'évaluation
- Les Liaisons MécaniquesDocument6 pagesLes Liaisons Mécaniquesabdelhi74100% (2)
- Touret A MeulerDocument15 pagesTouret A MeulerrahmaboufalghaPas encore d'évaluation
- Schéma CinématiqueDocument19 pagesSchéma CinématiqueSimo StitPas encore d'évaluation
- (TP01c) Serre JointDocument4 pages(TP01c) Serre JointraobenPas encore d'évaluation
- Boite VitesseDocument16 pagesBoite Vitesserabie_zitoun80% (5)
- Atelier CAO PDFDocument51 pagesAtelier CAO PDFchouchenePas encore d'évaluation
- Rondelles BellevilleDocument5 pagesRondelles BellevilleMahrez ZaafouriPas encore d'évaluation
- AccouplementsDocument23 pagesAccouplementsHoussem FelfelPas encore d'évaluation
- Cours Pignons Chaine LvesDocument1 pageCours Pignons Chaine LvesBouthalja FaikaPas encore d'évaluation
- Chapitre 0 - Introduction Aux Mécanismes de Transformations de Mouvements Sept 2020Document10 pagesChapitre 0 - Introduction Aux Mécanismes de Transformations de Mouvements Sept 2020Touhemi Ben SadokPas encore d'évaluation
- Cours CM Partie 1 PDFDocument40 pagesCours CM Partie 1 PDFJELLALI Alaa100% (1)
- Guidage en Translation PDFDocument10 pagesGuidage en Translation PDFAzerty DelegfrPas encore d'évaluation
- 6-Roues Et ChaînesDocument5 pages6-Roues Et ChaînesKamel BousninaPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- Chapitre 2 - TD - Devoir - N°2Document7 pagesChapitre 2 - TD - Devoir - N°2Loic ReyesPas encore d'évaluation
- Exercice Schema CinematiqueDocument4 pagesExercice Schema CinematiqueNeji Hmani100% (2)
- Formes PDFDocument7 pagesFormes PDFOussama BounabiPas encore d'évaluation
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZIPas encore d'évaluation
- Exercice Engrenages Revision eDocument1 pageExercice Engrenages Revision eakou100% (1)
- COURS VOCABULAIRE TECHNIQUE eDocument2 pagesCOURS VOCABULAIRE TECHNIQUE eTchassem SimeuPas encore d'évaluation
- Caractères de LiaisonDocument5 pagesCaractères de LiaisonGuy Effa100% (1)
- C26 Document Eleve - TP Application - Liaisons Et Schema Cinematique - Etau ModelismeDocument5 pagesC26 Document Eleve - TP Application - Liaisons Et Schema Cinematique - Etau ModelismeStef TfhPas encore d'évaluation
- CH 8 Tolérances Géometriques PDFDocument4 pagesCH 8 Tolérances Géometriques PDFmehdiPas encore d'évaluation
- Schéma CinématiqueDocument1 pageSchéma Cinématiquelephilo57Pas encore d'évaluation
- TD Rev Mini Compresseur PDFDocument5 pagesTD Rev Mini Compresseur PDFHajar NhailaPas encore d'évaluation
- 0 - Activité 3Document6 pages0 - Activité 3Kamel TayahiPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Schéma CinématiqueDocument48 pagesSchéma CinématiqueomatrPas encore d'évaluation
- Construction MécaniqueDocument250 pagesConstruction MécaniqueSimo MabrouukPas encore d'évaluation
- Metro LogieDocument22 pagesMetro LogieEzzahid IlyassPas encore d'évaluation
- Logique Combinatoire Et Multiplexage PDFDocument34 pagesLogique Combinatoire Et Multiplexage PDFkimPas encore d'évaluation
- ChapTransmission Liens Flexibles PDFDocument21 pagesChapTransmission Liens Flexibles PDFkimPas encore d'évaluation
- ChapTransmission Liens Flexibles PDFDocument21 pagesChapTransmission Liens Flexibles PDFkimPas encore d'évaluation
- HDR HLaurentDocument147 pagesHDR HLaurentkimPas encore d'évaluation
- Calcul Des TraversesDocument13 pagesCalcul Des TraversesNdeye Marieme DiagnePas encore d'évaluation
- Chapitre V Mouvement Des Solides en RotationDocument18 pagesChapitre V Mouvement Des Solides en Rotationradu70Pas encore d'évaluation
- Cours de Soutiens en ÉlectrotechniqueDocument23 pagesCours de Soutiens en ÉlectrotechniqueAsmae ElaPas encore d'évaluation
- Lexique Trilingue de Géotechnique PDFDocument8 pagesLexique Trilingue de Géotechnique PDFaaerPas encore d'évaluation
- Chapitre - EscaliersDocument9 pagesChapitre - EscaliersMohamed AmeurPas encore d'évaluation
- 02 Ondes Sinus CorrectionDocument3 pages02 Ondes Sinus CorrectionChartier JulienPas encore d'évaluation
- Atomistique Et Liaison Chimique PDFDocument41 pagesAtomistique Et Liaison Chimique PDFJudicaël SekaPas encore d'évaluation
- TD 05-02Document3 pagesTD 05-02RocPas encore d'évaluation
- DS1 Sem1Document1 pageDS1 Sem1Anonymous GMQSYtU0Pas encore d'évaluation
- CNC Si MP 2013 CGDocument14 pagesCNC Si MP 2013 CGMonsif monsifPas encore d'évaluation
- 3 1 Chapitre - 3 2Document5 pages3 1 Chapitre - 3 2Twansa WbattalaPas encore d'évaluation
- V. Etude Du TurboreacteurDocument40 pagesV. Etude Du TurboreacteursoheibPas encore d'évaluation
- Thermodynamique Exam 2020-21Document1 pageThermodynamique Exam 2020-21abdoul aziz zabrePas encore d'évaluation
- Chapitre: CalculDocument21 pagesChapitre: CalculKocouvi Agapi HouanouPas encore d'évaluation
- Clefs: Les Énergies Les ÉnergiesDocument108 pagesClefs: Les Énergies Les Énergiesguglu doljno bit pohPas encore d'évaluation
- Effet de Frottement HydrauliqueDocument6 pagesEffet de Frottement HydrauliqueIkram MouhibPas encore d'évaluation
- Application de La Méthode Des Éléments Finis Aux Écoulements en Milieu PoreuxDocument17 pagesApplication de La Méthode Des Éléments Finis Aux Écoulements en Milieu PoreuxAbderrahmane FarèsPas encore d'évaluation
- Cours Elmg01 Prof PDFDocument109 pagesCours Elmg01 Prof PDFTRAOREPas encore d'évaluation
- LASERDocument36 pagesLASERvitaly113Pas encore d'évaluation
- Cours Sem Enim A2020Document96 pagesCours Sem Enim A2020Hsan HaddarPas encore d'évaluation
- Exercice PhysiquesDocument6 pagesExercice PhysiquesBenAngel NzóPas encore d'évaluation
- Première Composition de Physique: Concours D'Admission 1999 FilièreDocument8 pagesPremière Composition de Physique: Concours D'Admission 1999 FilièreHome High-TechPas encore d'évaluation
- Cours8 PDFDocument24 pagesCours8 PDFAhmed NadiPas encore d'évaluation
- TP1 HyperfréquenceDocument17 pagesTP1 HyperfréquenceLotfi BoulefaaPas encore d'évaluation