Vous aimerez peut-être aussi
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Principe Fondamental de La StatiqueDocument10 pagesPrincipe Fondamental de La StatiqueGYPAETEPas encore d'évaluation
- Le Schema CinematiqueDocument3 pagesLe Schema Cinematiqueiraoui jamal (Ebay)0% (2)
- 2-Devoir de Controle N1-2AS-2021.31Document4 pages2-Devoir de Controle N1-2AS-2021.31Youssef Aouadi100% (1)
- Exercice REPRESENTATION DES FILETAGESDocument1 pageExercice REPRESENTATION DES FILETAGESkingslimPas encore d'évaluation
- CC1 Im1 Ie1 17 18Document1 pageCC1 Im1 Ie1 17 18Hamza Rimi0% (1)
- Liaison EncastrementDocument18 pagesLiaison Encastrementkhocine100% (1)
- Devoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagDocument2 pagesDevoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagSameh RomdhaniPas encore d'évaluation
- Schéma Cinématique Serre-Joint - PpsDocument25 pagesSchéma Cinématique Serre-Joint - PpsErica Franco50% (4)
- Evaluation Ajustements Vrin Bosch LvesDocument6 pagesEvaluation Ajustements Vrin Bosch LvesHanane TounsiPas encore d'évaluation
- Analyse Structurale Des MécanismesDocument13 pagesAnalyse Structurale Des MécanismesSalomon S. HoungbedjiPas encore d'évaluation
- DS1 ECAM3aDocument4 pagesDS1 ECAM3aQuentin MoalPas encore d'évaluation
- Correction Ds1 Systeme Automatise de Marquage de BoitesDocument4 pagesCorrection Ds1 Systeme Automatise de Marquage de BoitesAlami ElPas encore d'évaluation
- TechnologieDocument46 pagesTechnologieyacine100% (1)
- Dessin D'ensDocument27 pagesDessin D'ensIsrae El AmriPas encore d'évaluation
- Corrigé Mécanique T1 GP1 2021Document6 pagesCorrigé Mécanique T1 GP1 2021kara baPas encore d'évaluation
- Chap2 Leçon2 3&4Document52 pagesChap2 Leçon2 3&4Guiliass100% (2)
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFDocument7 pagesDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFmohouchPas encore d'évaluation
- 02 Bac 2008 Contrôle CorrigéDocument12 pages02 Bac 2008 Contrôle CorrigéMohamed AbedPas encore d'évaluation
- C26 Document Eleve - TP Application - Liaisons Et Schema Cinematique - Etau ModelismeDocument5 pagesC26 Document Eleve - TP Application - Liaisons Et Schema Cinematique - Etau ModelismeStef TfhPas encore d'évaluation
- Corrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonDocument8 pagesCorrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonpinamarkPas encore d'évaluation
- 43 Exercices EngrenageDocument9 pages43 Exercices EngrenageIlyas MhammediPas encore d'évaluation
- Exercices Isostatisme 2009Document4 pagesExercices Isostatisme 2009maraghni_hassine7592Pas encore d'évaluation
- TD02 Les Chaines FonctionnellesDocument7 pagesTD02 Les Chaines FonctionnellesPOU DannyPas encore d'évaluation
- Dess 1 Cours - Modelisation - Des - Liaisons - eDocument7 pagesDess 1 Cours - Modelisation - Des - Liaisons - eelvis etiennePas encore d'évaluation
- Exercice Ajustements eDocument3 pagesExercice Ajustements eMohsen SaidiPas encore d'évaluation
- TD N°3 PFS AnalytiqueDocument6 pagesTD N°3 PFS AnalytiqueRoubaPas encore d'évaluation
- DS1 - 1èr STEDocument4 pagesDS1 - 1èr STEmasteratsii100% (1)
- 27 Lubrification ÉtanchéitéDocument4 pages27 Lubrification ÉtanchéitéAnonymous Zu0p0SWg7Pas encore d'évaluation
- 07 Butee TrainardDocument5 pages07 Butee TrainardHkiri MohamedPas encore d'évaluation
- Rondelles BellevilleDocument5 pagesRondelles BellevilleMahrez ZaafouriPas encore d'évaluation
- Chapitre 2 - TD - Devoir - N°2Document7 pagesChapitre 2 - TD - Devoir - N°2Loic ReyesPas encore d'évaluation
- Les Liaisons Doc Prof MOUKHTARIDocument9 pagesLes Liaisons Doc Prof MOUKHTARIELMustaphaELMoukhtariPas encore d'évaluation
- Exercice - RDM - Cisaillement - Clavette Motorducteur - EnoncDocument4 pagesExercice - RDM - Cisaillement - Clavette Motorducteur - Enoncomar-benka-3821Pas encore d'évaluation
- Technique CDocument8 pagesTechnique CKarim FathiPas encore d'évaluation
- Touret A MeulerDocument15 pagesTouret A MeulerrahmaboufalghaPas encore d'évaluation
- Technologie: Note: ./20Document3 pagesTechnologie: Note: ./20Marouen MekkiPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- CPAV-Ex2 Emb-Frein PDFDocument5 pagesCPAV-Ex2 Emb-Frein PDFHanane TounsiPas encore d'évaluation
- TP Serre JointDocument4 pagesTP Serre Jointbakhchouch100% (1)
- Cahier 1AS 2019 v3Document65 pagesCahier 1AS 2019 v3Amar SaadiPas encore d'évaluation
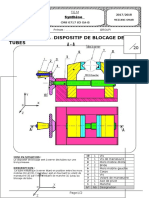
- Devoir de Controle N3-1AS-2014-Blocage Des TubesDocument3 pagesDevoir de Controle N3-1AS-2014-Blocage Des TubesomatrPas encore d'évaluation
- 207 0 Serre Joint Sous Ens 1Document3 pages207 0 Serre Joint Sous Ens 1mouad hamdaniPas encore d'évaluation
- Enoncé DS2 Mars 20191 - 1Document2 pagesEnoncé DS2 Mars 20191 - 1Fatma LaribiPas encore d'évaluation
- TP10 Meca3D Scie SauteuseDocument3 pagesTP10 Meca3D Scie SauteuseC'est Yana100% (1)
- D Synthèse3 2019 1SDocument6 pagesD Synthèse3 2019 1SAdel KmimechPas encore d'évaluation
- Feuillen10 Pfs PDFDocument4 pagesFeuillen10 Pfs PDFSaad AttarPas encore d'évaluation
- Modelisation CinematiqueDocument16 pagesModelisation CinematiqueAnonymous tNIpOVPyPas encore d'évaluation
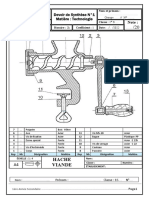
- DS N°1-1AS-2020-hache+viandes+Document4 pagesDS N°1-1AS-2020-hache+viandes+Youssef Aouadi0% (1)
- TD Avant RattrapageDocument6 pagesTD Avant RattrapageBakary Biro100% (1)
- Etau D ModelisteDocument23 pagesEtau D ModelisteYoro Boubou SIDIBEPas encore d'évaluation
- Compléter L'actigramme A0 de La Fonction Globale D'un CompresseurDocument2 pagesCompléter L'actigramme A0 de La Fonction Globale D'un CompresseurNoureddine HermetienPas encore d'évaluation
- Module Techniques D Usinage Mécanique Les Bases PDFDocument9 pagesModule Techniques D Usinage Mécanique Les Bases PDFMohamed SahilPas encore d'évaluation
- 2STM CoursDocument83 pages2STM CoursOUTEMSAA100% (1)
- F3 ApefDocument5 pagesF3 ApefZouhairPas encore d'évaluation
- Devoir 1 Modele 4 Si 2 Bac SM B Semestre 2Document11 pagesDevoir 1 Modele 4 Si 2 Bac SM B Semestre 2lemsouguer0% (1)
- TD 1Document2 pagesTD 1hello 128Pas encore d'évaluation
- COURS Théorie Des MécanismesDocument65 pagesCOURS Théorie Des MécanismesChristian DinhoPas encore d'évaluation
- Chapitre 1 TDMDocument13 pagesChapitre 1 TDMboudjemia.hicham.cm.a.3Pas encore d'évaluation
- RDM2 HadjmiloudDocument143 pagesRDM2 HadjmiloudAymen Khalfaoui100% (1)
- Soudage Et CND - M1 GMDocument51 pagesSoudage Et CND - M1 GMAymen KhalfaouiPas encore d'évaluation
- Projet 03. Le Discours Objectivé. Compréhension de LécritDocument3 pagesProjet 03. Le Discours Objectivé. Compréhension de LécritAymen KhalfaouiPas encore d'évaluation
- SPDDL Analyse DynamiqueDocument96 pagesSPDDL Analyse DynamiqueAymen KhalfaouiPas encore d'évaluation
- Exercices Sur La Mise en Position Isostatique ProfDocument2 pagesExercices Sur La Mise en Position Isostatique ProfAymen KhalfaouiPas encore d'évaluation
- RDM Chap2Document16 pagesRDM Chap2Aymen Khalfaoui100% (1)
- Compression Simple PDF FreeDocument7 pagesCompression Simple PDF FreeAymen KhalfaouiPas encore d'évaluation
- Automatisation Des Systèmes IndustrielsDocument5 pagesAutomatisation Des Systèmes IndustrielsAymen KhalfaouiPas encore d'évaluation
- TP Tableau de KarangDocument3 pagesTP Tableau de KarangAymen KhalfaouiPas encore d'évaluation
- Solution: Examen Final de Dynamique Des Machines TournantesDocument2 pagesSolution: Examen Final de Dynamique Des Machines TournantesAymen Khalfaoui50% (2)
- Chapitre 02Document8 pagesChapitre 02Aymen KhalfaouiPas encore d'évaluation
- ENERGIE GéothermiqueDocument12 pagesENERGIE GéothermiqueAymen Khalfaoui100% (1)
- Série N°1 Algèbre 2Document2 pagesSérie N°1 Algèbre 2Ali AkoumPas encore d'évaluation
- Compte RenduDocument8 pagesCompte RenduAmeni KhaledPas encore d'évaluation
- Exo ElectrisationDocument12 pagesExo ElectrisationNemir MimirPas encore d'évaluation
- Gravimetrie Hacini RDocument267 pagesGravimetrie Hacini RRachelter HrPas encore d'évaluation
- Simulation Electromagnetique LDocument5 pagesSimulation Electromagnetique LHassan AbaPas encore d'évaluation
- Catalogue Atlas Copco Dynapac 1Document11 pagesCatalogue Atlas Copco Dynapac 1serge.pungwePas encore d'évaluation
- TP L1 SM ElectricitéDocument14 pagesTP L1 SM Electriciténour elhoudaPas encore d'évaluation
- Ex - RDM 1 V2Document2 pagesEx - RDM 1 V2HB RIMPas encore d'évaluation
- Fiche Pédagogique-1BAC BIOFDocument1 pageFiche Pédagogique-1BAC BIOFJarch175% (4)
- TP Mecanique de SolDocument10 pagesTP Mecanique de SolBadr Eddine TaoussiPas encore d'évaluation
- SommareDocument2 pagesSommaretoward successPas encore d'évaluation
- Egron Thomas MScA 2014Document170 pagesEgron Thomas MScA 2014zkd77Pas encore d'évaluation
- A5. Fonction LogarrithmiqueDocument6 pagesA5. Fonction LogarrithmiqueSamou_haaPas encore d'évaluation
- LES MATÉRIAUX TEXTILES (Généralités)Document6 pagesLES MATÉRIAUX TEXTILES (Généralités)Louhichi AsmaPas encore d'évaluation
- Td7 Processus CorrigeDocument7 pagesTd7 Processus CorrigeNassim HammemiPas encore d'évaluation
- 12 Espaces EuclidiensDocument10 pages12 Espaces EuclidiensAndrianina BarthélémyPas encore d'évaluation
- Canevas Creation Labo LGMT 2020Document16 pagesCanevas Creation Labo LGMT 2020Rahma BoufarhPas encore d'évaluation
- DTR 8500 ManualDocument97 pagesDTR 8500 ManualPaulo CardosoPas encore d'évaluation
- Evaporation Concentration Support Du CoursDocument95 pagesEvaporation Concentration Support Du CoursAbaghough BrahimPas encore d'évaluation
- Brevet 2003Document63 pagesBrevet 2003Abdoul gadirou dialloPas encore d'évaluation
- TP BridageDocument5 pagesTP BridageMEJRI FaicelPas encore d'évaluation
- TD N°1 ADC MonophaséDocument2 pagesTD N°1 ADC MonophaséOum Solayman100% (1)
- Ens Scien 1re LDP Integral PDFDocument156 pagesEns Scien 1re LDP Integral PDFJean Pigeon80% (5)
- Massif de Candélabre BDDocument2 pagesMassif de Candélabre BDtidus00_3Pas encore d'évaluation
- TD Matériaux GC-L2 Manefouet Kentsa-Mai 2021 FlattenDocument3 pagesTD Matériaux GC-L2 Manefouet Kentsa-Mai 2021 FlattenFranck BitaPas encore d'évaluation
- TD1 2019 20 CorrectionDocument13 pagesTD1 2019 20 CorrectionKayl MidoPas encore d'évaluation
- Exposé 2022 EPS Le Saut en HauteurDocument2 pagesExposé 2022 EPS Le Saut en HauteurANE100% (1)
- 19 Vecteurs 1 MDocument8 pages19 Vecteurs 1 MtchokoPas encore d'évaluation
- Melangeur: 1. DescriptionDocument6 pagesMelangeur: 1. DescriptionAmine Ait bounouPas encore d'évaluation
- 85090020.03 Manuel D'instructions FRDocument66 pages85090020.03 Manuel D'instructions FRJAMESPas encore d'évaluation