Vous aimerez peut-être aussi
- Chapitre 4 (Transformations)Document8 pagesChapitre 4 (Transformations)Rabiie MnasriiPas encore d'évaluation
- Transformation affine: Libérer des perspectives visuelles : explorer la transformation affine en vision par ordinateurD'EverandTransformation affine: Libérer des perspectives visuelles : explorer la transformation affine en vision par ordinateurPas encore d'évaluation
- TD2TP22021Document3 pagesTD2TP22021fellah baha eddinePas encore d'évaluation
- Homographie: Homographie : transformations en vision par ordinateurD'EverandHomographie: Homographie : transformations en vision par ordinateurPas encore d'évaluation
- La Symétrie AxialeDocument22 pagesLa Symétrie AxialeSimo MousPas encore d'évaluation
- C - Maths@Tle D - CHAP I COURBES PARAMETREESDocument18 pagesC - Maths@Tle D - CHAP I COURBES PARAMETREESKAMBOU JULESPas encore d'évaluation
- Transformations Du Plan Cours 2 2Document4 pagesTransformations Du Plan Cours 2 2Mohamed Ben talebPas encore d'évaluation
- Série N°01 Techniques de TransformationsDocument1 pageSérie N°01 Techniques de Transformationsali BourenanePas encore d'évaluation
- Transformations Du Plan Cours 1Document6 pagesTransformations Du Plan Cours 1Jaouhari SaidPas encore d'évaluation
- Operations Geometriques 2DDocument12 pagesOperations Geometriques 2DNadia DridiPas encore d'évaluation
- These 4Document20 pagesThese 4EliasPas encore d'évaluation
- Matrices 7 Determinants Et TransformationsDocument6 pagesMatrices 7 Determinants Et TransformationsAnahi MaâroufPas encore d'évaluation
- Tcs Transformations CourDocument4 pagesTcs Transformations CourAyoub Alami0% (1)
- 04732330-Ldp-Spe c03 OkDocument23 pages04732330-Ldp-Spe c03 OkxevniPas encore d'évaluation
- Polycopié Des Travaux Dirigés de Mécanique Du PointDocument43 pagesPolycopié Des Travaux Dirigés de Mécanique Du PointNisrine Nisrinita50% (2)
- Chapitre 2 Géométrique ModifierDocument28 pagesChapitre 2 Géométrique Modifierali18abid100% (1)
- Dombre Notations PDFDocument22 pagesDombre Notations PDFLarbi ElbakkaliPas encore d'évaluation
- Exercices Corriges Geometrie Dans Le PlanDocument20 pagesExercices Corriges Geometrie Dans Le Planred75% (4)
- Leçon 57 Fonctions V FinalDocument4 pagesLeçon 57 Fonctions V FinalArielPas encore d'évaluation
- Transformations Du Plan Resume de Cours 1Document1 pageTransformations Du Plan Resume de Cours 1Jaouhari SaidPas encore d'évaluation
- Chap 2 MécaniDocument20 pagesChap 2 MécaniMame Diarra NiangPas encore d'évaluation
- 1C Maths Leçon 08 Composée de Transformations Du PlanDocument14 pages1C Maths Leçon 08 Composée de Transformations Du PlanNamory100% (1)
- Cor Transformations GeometriquesDocument7 pagesCor Transformations GeometriquesclarelerandrianomenisoaPas encore d'évaluation
- Intervention Géométrie Février-Hammet 2019Document24 pagesIntervention Géométrie Février-Hammet 2019benjedidiachokriPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Méthode de MohrDocument17 pagesMéthode de MohrDragana Jevremovic50% (2)
- Chapitre 16Document5 pagesChapitre 16Stephane AtabongPas encore d'évaluation
- Adm TG PDFDocument24 pagesAdm TG PDFjhdmssPas encore d'évaluation
- Chapitre 2-2Document15 pagesChapitre 2-2Reda BachnouPas encore d'évaluation
- Transformation du radon: Dévoiler des modèles cachés dans les données visuellesD'EverandTransformation du radon: Dévoiler des modèles cachés dans les données visuellesPas encore d'évaluation
- Transformations - Cours CompletDocument53 pagesTransformations - Cours Completsergedemirdjian1990Pas encore d'évaluation
- Cours Analyse 2 PDFDocument32 pagesCours Analyse 2 PDFDriss El HadaouiPas encore d'évaluation
- Chap2. Déplacements Des Poutres FléchiesDocument19 pagesChap2. Déplacements Des Poutres FléchiesBelheziel AekPas encore d'évaluation
- Cours MilieuDocument39 pagesCours Milieuwonder wisePas encore d'évaluation
- Cours RDM-1Document60 pagesCours RDM-1mohamed bananePas encore d'évaluation
- 3 - Vecteurs Droites Plans de L'espace - AnnotéDocument16 pages3 - Vecteurs Droites Plans de L'espace - Annotédieudonnee.petitPas encore d'évaluation
- CNC 2022 SI E+cDocument36 pagesCNC 2022 SI E+cSoumaya AmerkadPas encore d'évaluation
- CNC Si Psi 2022Document25 pagesCNC Si Psi 2022yousra elassouiPas encore d'évaluation
- Policopi YadjourDocument75 pagesPolicopi YadjourAymen HsPas encore d'évaluation
- Chapitre 2 Tech Math Model Sys LineairesDocument8 pagesChapitre 2 Tech Math Model Sys LineairesGermaine EkoumkangPas encore d'évaluation
- Maths - 2nde C - UTILISATION - DES - SYMETRIES - TRANSLATIONS - ConsolidéDocument17 pagesMaths - 2nde C - UTILISATION - DES - SYMETRIES - TRANSLATIONS - ConsolidéSergePas encore d'évaluation
- Transfos PDFDocument54 pagesTransfos PDFHicham ElyassamiPas encore d'évaluation
- Tcs Transformations Cour JadidDocument8 pagesTcs Transformations Cour JadidSanogoPas encore d'évaluation
- TD 2 - 2021Document2 pagesTD 2 - 2021hiba gribaPas encore d'évaluation
- 02 - Cinématique 2Document14 pages02 - Cinématique 2Keziah MustunPas encore d'évaluation
- NYA - XXI - Chap 1.5bDocument8 pagesNYA - XXI - Chap 1.5bzied daPas encore d'évaluation
- Memo Dep AntideplDocument3 pagesMemo Dep AntideplDrino EkayaPas encore d'évaluation
- TD Transformation GéométriqueDocument1 pageTD Transformation GéométriqueAly GAMALEDDYNPas encore d'évaluation
- Chap2 Rappel Math ER1Document46 pagesChap2 Rappel Math ER1Walid BsdPas encore d'évaluation
- 01-Systemes de Coord Rect Et PolaDocument7 pages01-Systemes de Coord Rect Et PolaBeloucif GCPas encore d'évaluation
- Devoir de Ratrapage Mecanique Du PointDocument2 pagesDevoir de Ratrapage Mecanique Du PointPreparation TafemPas encore d'évaluation
- Serie 1Document1 pageSerie 1Çhøčø LãtãPas encore d'évaluation
- TP AsservissementsDocument5 pagesTP AsservissementsibouPas encore d'évaluation
- Transformations Coordonnees GeodesiquesDocument16 pagesTransformations Coordonnees GeodesiquesAhmed EnnehriPas encore d'évaluation
- Cinematique Du PointDocument7 pagesCinematique Du PointKangah Louis KouassiPas encore d'évaluation
- Tayc - Room 69 (Speed Up) - YouTubeDocument3 pagesTayc - Room 69 (Speed Up) - YouTubeMamadouwane DoumbouyaPas encore d'évaluation
- 0 Rappels Mathématiques - Interractions Entre Charges Au ReposDocument44 pages0 Rappels Mathématiques - Interractions Entre Charges Au ReposMed AithidaPas encore d'évaluation
- chp1 Element de CinematiqueDocument6 pageschp1 Element de CinematiqueBlack RootsPas encore d'évaluation
- Cours de Robotique - 3ème AT - VERSION 2021-29-49Document21 pagesCours de Robotique - 3ème AT - VERSION 2021-29-49Douaa GhazouaniPas encore d'évaluation
- Devoir Prépa CAPES 2021Document2 pagesDevoir Prépa CAPES 2021naababaongo052Pas encore d'évaluation
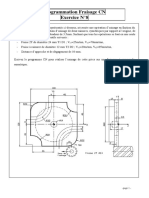
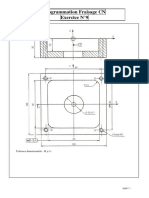
- Exercice N8 PDFDocument1 pageExercice N8 PDFO ZPas encore d'évaluation
- Exercice N9 PDFDocument2 pagesExercice N9 PDFO Z0% (1)
- Examen de Controle - Commande Numérique - 21062018Document14 pagesExamen de Controle - Commande Numérique - 21062018O Z100% (2)
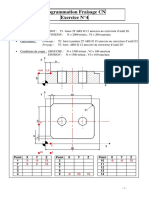
- Exercice N4Document1 pageExercice N4O ZPas encore d'évaluation
- Examen - Commande Numérique - 18052018-3 PDFDocument18 pagesExamen - Commande Numérique - 18052018-3 PDFO ZPas encore d'évaluation
- Exercice N2 CorrigéDocument2 pagesExercice N2 CorrigéO Z100% (1)
- Examen - Commande Numérique - 18052018-3-CorrigéDocument21 pagesExamen - Commande Numérique - 18052018-3-CorrigéO Z67% (3)
- Devoir Surveillé - Commande Numérique - 15032019 - Final - CorrigéDocument17 pagesDevoir Surveillé - Commande Numérique - 15032019 - Final - CorrigéO ZPas encore d'évaluation
- 1 EEP - GM 2020 - Chap1&2 PDFDocument30 pages1 EEP - GM 2020 - Chap1&2 PDFO ZPas encore d'évaluation
- C2 R Cap Int 20 21 Meca 2020Document82 pagesC2 R Cap Int 20 21 Meca 2020O ZPas encore d'évaluation
- Devoir Surveillé - Commande Numérique - 16032018 - Corrigé PDFDocument22 pagesDevoir Surveillé - Commande Numérique - 16032018 - Corrigé PDFO Z100% (2)
- Bourse ItalieDocument1 pageBourse ItalieO ZPas encore d'évaluation
- Cours Cao IiDocument61 pagesCours Cao IiO ZPas encore d'évaluation
- Devoir Surveillé - Commande Numérique - 15032019 - Final - CorrigéDocument17 pagesDevoir Surveillé - Commande Numérique - 15032019 - Final - CorrigéO ZPas encore d'évaluation
- Chapitre 5Document8 pagesChapitre 5O ZPas encore d'évaluation
- Chapitre 4Document17 pagesChapitre 4O ZPas encore d'évaluation
- TD Gamme de FabricationDocument4 pagesTD Gamme de FabricationO Z50% (2)
- DynSystAnnex4 (Bessel)Document3 pagesDynSystAnnex4 (Bessel)O ZPas encore d'évaluation
- TD 4 Chaines CaractèresDocument4 pagesTD 4 Chaines CaractèresO ZPas encore d'évaluation
- TD N°6 CaoiiDocument1 pageTD N°6 CaoiiO ZPas encore d'évaluation
- TP 5 PointeursDocument6 pagesTP 5 PointeursO Z100% (1)
- TD N°5 Caoii PDFDocument1 pageTD N°5 Caoii PDFO ZPas encore d'évaluation
- Les Nombres Relatifs - PresentationsDocument5 pagesLes Nombres Relatifs - Presentationsh.el.appy01Pas encore d'évaluation
- Math 1er Cour - 8 PDFDocument12 pagesMath 1er Cour - 8 PDFsoufiane soufPas encore d'évaluation
- DfasdfDocument48 pagesDfasdfMarco Antonio RodriguezPas encore d'évaluation
- La Fonction ExponentielleDocument10 pagesLa Fonction ExponentielleiVictoriousPas encore d'évaluation
- Maths Terminale - RevisionDocument3 pagesMaths Terminale - RevisionNat-Saïdah HenriPas encore d'évaluation
- 104Document3 pages104Joséphine NancassePas encore d'évaluation
- Calcul SpinorielDocument8 pagesCalcul SpinorielCristiano da silva0% (1)
- Devoir 1ere ADocument2 pagesDevoir 1ere ALotfi BoucharebPas encore d'évaluation
- 612abbb2523absujets Corriges de Maths Portant Sur Les Nombres CDocument82 pages612abbb2523absujets Corriges de Maths Portant Sur Les Nombres CMassoma DossoPas encore d'évaluation
- 1ere D DERIVATIONDocument30 pages1ere D DERIVATIONDeaSahiPas encore d'évaluation
- Solutions Exercices Chap17Document20 pagesSolutions Exercices Chap17linaPas encore d'évaluation
- TD Residus PDFDocument3 pagesTD Residus PDFAbderrahmane MoAPas encore d'évaluation
- CongruDocument3 pagesCongrushahinaz9Pas encore d'évaluation
- Algebre1 TD7 CorrigeDocument11 pagesAlgebre1 TD7 CorrigeNawres AbbessiPas encore d'évaluation
- CarréDocument6 pagesCarréproff paladePas encore d'évaluation
- Calcul Vectoriel: Résumé de Cours 2Document1 pageCalcul Vectoriel: Résumé de Cours 2imed ouniPas encore d'évaluation
- Ens MPDocument3 pagesEns MPSamia KarroumiPas encore d'évaluation
- Équations Différentielles ScilabDocument9 pagesÉquations Différentielles ScilabOukhouya AbdelwahabPas encore d'évaluation
- Chapitre2 Suites de Nombres RéelsDocument16 pagesChapitre2 Suites de Nombres Réelsmohamed pharmPas encore d'évaluation
- Un Projet en C++: R Esolution D' Equations Diff Erentielles Lin EairesDocument62 pagesUn Projet en C++: R Esolution D' Equations Diff Erentielles Lin EairesIbtissem DERRARPas encore d'évaluation
- Ex398 Couts Benef Cout Moyen PDFDocument4 pagesEx398 Couts Benef Cout Moyen PDFephrahim yeoPas encore d'évaluation
- Maths 1 Second Degre Corriges: 1. Exercices de CoursDocument2 pagesMaths 1 Second Degre Corriges: 1. Exercices de Coursapi-203629011Pas encore d'évaluation
- Cours CNED Physique TS - Sequence 01Document60 pagesCours CNED Physique TS - Sequence 01Céline Lutti100% (2)
- Cours 2bac Biof 2023-2024 Abdel1Document56 pagesCours 2bac Biof 2023-2024 Abdel1jabarPas encore d'évaluation
- Cours Élémnts Math Pour PhysiquesDocument25 pagesCours Élémnts Math Pour PhysiquesEmmanuel Vianney100% (1)
- Sequence3 ProportionnaliteDocument9 pagesSequence3 ProportionnaliteNm31Pas encore d'évaluation
- C DSP Part2Document31 pagesC DSP Part2imad el-ghayouryPas encore d'évaluation
- Etude de Fonctions Numériques Terminal SDocument6 pagesEtude de Fonctions Numériques Terminal Sdiallo100% (2)
- Commande Numérique Partie2Document83 pagesCommande Numérique Partie2FLASPas encore d'évaluation
- 5 7-PDF AideM C3 A9moireVOM PDFDocument1 page5 7-PDF AideM C3 A9moireVOM PDFMourad BoukhedimiPas encore d'évaluation