Vous aimerez peut-être aussi
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Moteur Et RéducteurDocument2 pagesMoteur Et RéducteurMehdi HassinePas encore d'évaluation
- Dessin ReducteurDocument1 pageDessin ReducteurkhocinePas encore d'évaluation
- Train EpicycloidalDocument13 pagesTrain EpicycloidalKhmira WafaPas encore d'évaluation
- PFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFDocument98 pagesPFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFMouad BottePas encore d'évaluation
- Les Douille À Billes PDFDocument50 pagesLes Douille À Billes PDFNadia DridiPas encore d'évaluation
- TD CompresseurDocument7 pagesTD CompresseurNaoufel FaresPas encore d'évaluation
- Ponce UseDocument7 pagesPonce UseAbderrazak MiassarPas encore d'évaluation
- Train EpicycloidalDocument12 pagesTrain EpicycloidalNaima LaaroussiPas encore d'évaluation
- 189 4 PDFDocument3 pages189 4 PDFZiari SaberPas encore d'évaluation
- 34 Reducteur PDFDocument2 pages34 Reducteur PDFgilbertogato100% (3)
- Modelisation AssemblageDocument33 pagesModelisation AssemblageWalid NASRI100% (1)
- Utilisation Du Logiciel CATIA V5 La Pièce CoudéeDocument13 pagesUtilisation Du Logiciel CATIA V5 La Pièce CoudéeAymane Elfinou IIPas encore d'évaluation
- Définition Et Cotation Fonctionnelle Des Pièces Mécaniques PDFDocument86 pagesDéfinition Et Cotation Fonctionnelle Des Pièces Mécaniques PDFGuy Ygal100% (1)
- Chapitre 1Document31 pagesChapitre 1mahdi hadhri100% (1)
- COMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Document16 pagesCOMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Salma Rekik100% (1)
- TP2 CAO Croix de MalteDocument12 pagesTP2 CAO Croix de MalteKamel BousninaPas encore d'évaluation
- Stage InitiationDocument28 pagesStage Initiationala dinne hajriPas encore d'évaluation
- Corrigé TD-5 - TD de SynthèseDocument5 pagesCorrigé TD-5 - TD de SynthèseAljawhara SaraPas encore d'évaluation
- 36 07 Mise en Position PDFDocument2 pages36 07 Mise en Position PDFAnas MohtadiPas encore d'évaluation
- Contrat de PhaseDocument5 pagesContrat de Phasehchaguer100% (2)
- Rapport CNCDocument10 pagesRapport CNChajarisoPas encore d'évaluation
- TP Flexion 2Document3 pagesTP Flexion 2Mrnadhir MecaniquePas encore d'évaluation
- Les Outils Tournage - PROFDocument4 pagesLes Outils Tournage - PROFOmar JouiniPas encore d'évaluation
- Guidage en Rotation Par RoulementDocument2 pagesGuidage en Rotation Par RoulementMIMFS100% (1)
- TD 3 Loi Entrée Sortie Par Fermeture GéométriqueDocument4 pagesTD 3 Loi Entrée Sortie Par Fermeture GéométriqueChokri AtefPas encore d'évaluation
- Examen de Conception Mecanique 2009 CorrigeDocument16 pagesExamen de Conception Mecanique 2009 Corrigebhsbhs19Pas encore d'évaluation
- RéducteurDocument9 pagesRéducteurImed ElhajPas encore d'évaluation
- CH1 Théorie de La CoupeDocument14 pagesCH1 Théorie de La CoupeEya Essayel100% (1)
- Engrenage HéliquoidaleDocument105 pagesEngrenage HéliquoidaleKhemili SayfPas encore d'évaluation
- Analyse FonctionnelleDocument7 pagesAnalyse FonctionnellemoihaPas encore d'évaluation
- Le TournageDocument11 pagesLe TournageAbdessadek HamdaouiPas encore d'évaluation
- GM 2Document39 pagesGM 2Youcef MimouniPas encore d'évaluation
- La Programmation Des MOCN - Codes ISO PDFDocument8 pagesLa Programmation Des MOCN - Codes ISO PDFCherche Annonce AnnoncePas encore d'évaluation
- Compresseur 2011 2012 PDFDocument52 pagesCompresseur 2011 2012 PDFHoucine GhorbelPas encore d'évaluation
- Rapport AbaqusDocument27 pagesRapport Abaquselgheryb_choukri100% (1)
- Reducteur A Vis Sans FinDocument18 pagesReducteur A Vis Sans FinImane ElkhoukhPas encore d'évaluation
- Chap II Isostatisme 1Document20 pagesChap II Isostatisme 1mohammed belhadj kelkalPas encore d'évaluation
- Comment Dimensionner Un Moto-ReducteurDocument1 pageComment Dimensionner Un Moto-ReducteurMB OPas encore d'évaluation
- Contarainte D'antérioritéDocument16 pagesContarainte D'antérioritéMajed NesrinePas encore d'évaluation
- TP Catia (Assemblage Moteur)Document95 pagesTP Catia (Assemblage Moteur)Semlali ZakariaPas encore d'évaluation
- Ptv-Roue À GorgeDocument5 pagesPtv-Roue À Gorgeadem bengharsaPas encore d'évaluation
- dm1 MathsDocument14 pagesdm1 Mathssamim1971Pas encore d'évaluation
- Solidworks Mise en Plan D'une PièceDocument6 pagesSolidworks Mise en Plan D'une Pièceeras novaPas encore d'évaluation
- Fabrication Mécanique L2Document9 pagesFabrication Mécanique L2Mathilde MimiPas encore d'évaluation
- Le TournageDocument244 pagesLe TournageHamada HamadaPas encore d'évaluation
- Catalogue Emile Maurin Fixation Ed 3 0 Juillet 2015 PDF 25 5 Mo BV Lcat0Document828 pagesCatalogue Emile Maurin Fixation Ed 3 0 Juillet 2015 PDF 25 5 Mo BV Lcat0CharlesDelaportePas encore d'évaluation
- 4-Mode D'action Des FraisesDocument3 pages4-Mode D'action Des Fraisessb ali0% (1)
- Presentation Picos18Document22 pagesPresentation Picos18Saf Bes100% (1)
- C.F.a.O. - Conception Et Fabrication Assistées Par Ordinateur.Document13 pagesC.F.a.O. - Conception Et Fabrication Assistées Par Ordinateur.MohamedAyoubPas encore d'évaluation
- Système Vis ÉcrouDocument2 pagesSystème Vis ÉcrouTarek Ben Moncef AdouaniPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Dépannage de l'impression 3D: Le manuel complet pour un dépannage rapide et facile de l'impression FDM 3DD'EverandDépannage de l'impression 3D: Le manuel complet pour un dépannage rapide et facile de l'impression FDM 3DPas encore d'évaluation
- Galilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsD'EverandGalilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsPas encore d'évaluation
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsD'EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsPas encore d'évaluation
- Reducteur de VitesseDocument26 pagesReducteur de Vitesseamjed_de_enim67% (3)
- Conception, Etude Et Realisati - Elannab OthmaneDocument122 pagesConception, Etude Et Realisati - Elannab Othmanefall100% (1)
- RécapDocument113 pagesRécapMoudi Bouhlel100% (1)
- Conoyeur12 PDFDocument2 pagesConoyeur12 PDFMoudi BouhlelPas encore d'évaluation
- Pfa LEONI 2020Document30 pagesPfa LEONI 2020Moudi Bouhlel100% (1)
- Le Moteur Asynchrone TriphaseDocument8 pagesLe Moteur Asynchrone TriphaseaminePas encore d'évaluation
- LumiéreDocument5 pagesLumiéreMoudi BouhlelPas encore d'évaluation
- Manuel Sur L'environnement IIDocument546 pagesManuel Sur L'environnement IIMoudi BouhlelPas encore d'évaluation
- 677Document56 pages677Ishak .FPas encore d'évaluation
- COMPRESSDocument2 pagesCOMPRESSMoudi BouhlelPas encore d'évaluation
- Catalogue TexterDocument12 pagesCatalogue TexterAziz AmtdiPas encore d'évaluation
- Choix Matériaux Colombani PDFDocument22 pagesChoix Matériaux Colombani PDFMoudi BouhlelPas encore d'évaluation
- TP AutomatiqueDocument8 pagesTP AutomatiqueMoudi BouhlelPas encore d'évaluation
- Analyse Critique Et Dimentionn - KHALDOUNE Abdelhakim - 3494 PDFDocument126 pagesAnalyse Critique Et Dimentionn - KHALDOUNE Abdelhakim - 3494 PDFHamza Ait HouPas encore d'évaluation
- TP AutomatiqueDocument8 pagesTP AutomatiqueMoudi BouhlelPas encore d'évaluation
- Vis EcrouDocument18 pagesVis EcrouAyou HamPas encore d'évaluation
- Caracteristiques MateriauxDocument46 pagesCaracteristiques MateriauxMohamed Abed100% (2)
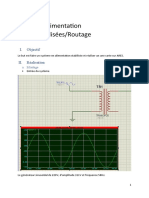
- Alimentation Stabilisées/routage: I. ObjectifDocument4 pagesAlimentation Stabilisées/routage: I. ObjectifMoudi BouhlelPas encore d'évaluation
- 2a Tis Robotique Slides PDFDocument213 pages2a Tis Robotique Slides PDFSouhaib LoudaPas encore d'évaluation
- BE CoursDocument31 pagesBE CoursMoudi BouhlelPas encore d'évaluation
- 02 PDFDocument129 pages02 PDFkarimPas encore d'évaluation
- SoutenanceDocument61 pagesSoutenanceMoudi BouhlelPas encore d'évaluation
- Métallurgie de Soudage1 EpiDocument41 pagesMétallurgie de Soudage1 EpiMoudi BouhlelPas encore d'évaluation
- FS BatteurDocument6 pagesFS BatteurMoudi BouhlelPas encore d'évaluation
- Cours Structure Et Matériaux - Trempe Étagée PDFDocument6 pagesCours Structure Et Matériaux - Trempe Étagée PDFMoudi BouhlelPas encore d'évaluation
- Programme MI 2013Document80 pagesProgramme MI 2013Moudi Bouhlel100% (2)
- (TDP) (TD) Robot TondeurDocument3 pages(TDP) (TD) Robot TondeurTafotchin Kone100% (1)
- Mise en Oeuvre D'un GRAFCET-6-HergliDocument12 pagesMise en Oeuvre D'un GRAFCET-6-HergliMoudi BouhlelPas encore d'évaluation
- Les Techniques de Controle Non Destructif Des SouduresDocument55 pagesLes Techniques de Controle Non Destructif Des SouduresMoudi Bouhlel100% (1)
- Analyse FonctionnelleDocument8 pagesAnalyse FonctionnelleMoudi BouhlelPas encore d'évaluation
- Gamme Operatoire G.O.5. Demonter Une Pompe Volumetrique: Banc de Maintenance de Pompe - MBP 102Document6 pagesGamme Operatoire G.O.5. Demonter Une Pompe Volumetrique: Banc de Maintenance de Pompe - MBP 102fedelogement allierPas encore d'évaluation
- Sujets 2012 Bachibac HG CorrectionsDocument7 pagesSujets 2012 Bachibac HG CorrectionsEmmanuel OuralPas encore d'évaluation
- S1 ML0524 B - T6CSH Single Vane PumpDocument8 pagesS1 ML0524 B - T6CSH Single Vane PumpBernardo Orozco LariosPas encore d'évaluation
- Concours National Deug Epreuve de Francais 2004Document4 pagesConcours National Deug Epreuve de Francais 2004Majed JallouliPas encore d'évaluation
- Stage de Fin D'Etudes: Ecole D'Ingenierie Et D'Innovation de MarrakechDocument3 pagesStage de Fin D'Etudes: Ecole D'Ingenierie Et D'Innovation de MarrakechFatine BEN ABDELGHANIPas encore d'évaluation
- Variateur de Fréquence - HTML PDFDocument17 pagesVariateur de Fréquence - HTML PDFAnonymous oyUAtpK0% (1)
- Concurrence Pure Et ParfaiteDocument73 pagesConcurrence Pure Et ParfaitesmatiPas encore d'évaluation
- Solution TP AsservissementDocument9 pagesSolution TP AsservissementÄy MênPas encore d'évaluation
- Bases Fondamentales de La Préparation Des Minerais 2011Document124 pagesBases Fondamentales de La Préparation Des Minerais 2011Vicbeau350% (2)
- nd2313 PDFDocument9 pagesnd2313 PDFYassine BouchPas encore d'évaluation
- Inventaire de Nos Fautes Les Plus Usuelles - Sylva ClapinDocument194 pagesInventaire de Nos Fautes Les Plus Usuelles - Sylva Clapinpetros dionPas encore d'évaluation
- Projet Fin D'etudeDocument34 pagesProjet Fin D'etudehjjh100% (1)
- BENHRIMIDA 1 ChaltouteDocument12 pagesBENHRIMIDA 1 ChaltouteAmine ChettatPas encore d'évaluation
- L'impact de La Communication Interne Sur La Performance Des Salariés Cas Pratique Danone Djurdjura Akbou (Bejaia)Document130 pagesL'impact de La Communication Interne Sur La Performance Des Salariés Cas Pratique Danone Djurdjura Akbou (Bejaia)saliha ameziane100% (1)
- 17 EquaDiffScalaires1 CompletDocument4 pages17 EquaDiffScalaires1 CompletTtabi VeydiPas encore d'évaluation
- Devoir de Contrôle N°1Document5 pagesDevoir de Contrôle N°1Karem SAADPas encore d'évaluation
- Stop en Cas de Danger / Sécuriser / Reprendre Le Travail: ConstructionDocument1 pageStop en Cas de Danger / Sécuriser / Reprendre Le Travail: ConstructionLanciné Djene KouroumaPas encore d'évaluation
- Nos Radiateurs Éléctriques - Nos Radiateurs Éléctriques CarreraDocument1 pageNos Radiateurs Éléctriques - Nos Radiateurs Éléctriques CarreraChristophe DUMAZET MARTINPas encore d'évaluation
- Le Processus StratégiqueDocument2 pagesLe Processus StratégiqueNajwa AmellalPas encore d'évaluation
- Le Centre D'Enfouissement Technique Réalisation Et Fonctionnement PDF Décharge (Déchet) DéchetsDocument1 pageLe Centre D'Enfouissement Technique Réalisation Et Fonctionnement PDF Décharge (Déchet) DéchetsAlle GuigPas encore d'évaluation
- Dimensionnement Des RéservoirsDocument1 pageDimensionnement Des RéservoirsArthur TohamPas encore d'évaluation
- Đề cương - L'OCÉAN INDIENDocument6 pagesĐề cương - L'OCÉAN INDIENK60 Tạ Hà LinhPas encore d'évaluation
- Examen EDO 2016-2017Document2 pagesExamen EDO 2016-2017interactif tchatcheuPas encore d'évaluation
- CdA ZeroDocument40 pagesCdA ZeroangedesjolisbasPas encore d'évaluation
- 125 Bouddine BenfaidaDocument38 pages125 Bouddine BenfaidaOthmane BenfaidaPas encore d'évaluation
- L'entretienDocument24 pagesL'entretienhanae elharounPas encore d'évaluation
- Article IADocument2 pagesArticle IAloukmaneanassriPas encore d'évaluation
- Rapport-Stage - ModiffierDocument40 pagesRapport-Stage - ModiffierOussama RachikPas encore d'évaluation
- Séquence Passerelle de 2AMDocument2 pagesSéquence Passerelle de 2AMbelabed100% (1)
- Béton FibréDocument9 pagesBéton FibréYoucef BenmoussaPas encore d'évaluation