Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
Modélisation des SLCI et Calcul Symbolique
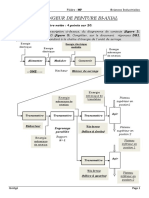
Exemples de Systèmes Automatiques de la salle de TP
DIRECTION ASSISTEE ELECTRIQUE, MAXPID, CORDEUSE DE RAQUETTE ...
Afin de prévoir le comportement d'un système, on doit non seulement être capable de
proposer une modélisation des entrées mais également un modèle de comportement du
système, pour ce dernier, le modèle retenu est le Système Linéaire Continu Invariant (SLCI).
L’objectif de ce cours est de présenter les hypothèses de modélisation du SLCI, les principaux
modèles de comportement utilisés ainsi que les outils mathématiques utiles en automatique.
1 - HYPOTHESES DE MODELISATION DES SLCI
1.1. Le système
Le système est représenté par un schéma-bloc fonctionnel contenant le nom du système. Les
entrées (causes) sont situées à gauche et les sorties (effets) à droite. Il est caractérisé par une
fonction mathématique en entrée e(t) et en sortie s(t).
e(t) s(t)
Système
1.2. Système linéaire
Un système est dit linéaire si la fonction qui décrit son comportement est elle-même linéaire.
Cette dernière vérifie alors le principe de proportionnalité et de superposition.
e(t) s(t) k.e(t) k.s(t)
Système Système
Proportionnalité
e1(t) s1(t)
Système
e1(t) + e2(t) s1(t) + s2(t)
Système
e2(t) s2(t) Superposition
Système
s(t)
Si le système est linéaire on obtient, en traçant la réponse s(t)
Pente = gain
en fonction de e(t) (pour un instant donné ou en régime
du système
permanent), la caractéristique du système égale à une droite de
pente K (gain du système).
e(t)
Florestan MATHURIN Page 1 sur 10
Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
Attention à ne pas confondre la caractéristique sortie fonction de l’entrée avec la courbe
sortie fonction du temps qui, elle, est très souvent non-linéaire.
En réalité aucun système n’est parfaitement linéaire. La caractéristique entrée sortie
comporte toujours plus ou moins des non linéarités, notamment aux faibles amplitudes
(seuils) ou aux fortes amplitudes (saturation, courbure). Le système est dit non linéaire.
s(t) s(t) s(t) s(t)
smaxi
e(t) emini e(t) e(t) e(t)
Courbure Seuil Saturation Hystérésis
Exemple : saturation Exemple : frottement Exemple : butée Exemple : jeux
amplificateur mécanique mécaniques
s(t)
Dans la pratique pour étudier les systèmes, Approximation linéaire
on linéarise la caractéristique entrée-sortie
au voisinage du point de fonctionnement
Point de fonctionnement
étudié en remplaçant la portion de courbe
étudié
par une droite. Le système est dit alors
linéarisé. Zone d’approximation linéaire
e(t)
1.3. Système continu
Un système est continu, par opposition à un système discret, lorsque les variations des
grandeurs physiques sont définies à chaque instant (ils sont caractérisés par des fonctions
continues). On parle aussi dans ce cas de système analogique.
(1)
1.4. Système invariant
masse, dimensions, (1)
Un système est dit invariant si on suppose que les caractéristiques du système ne varient
résistance,
impédance, ... pas au cours du temps ("le système ne vieillit pas").
Entrée e(t) Entrée e(t)
Sortie s(t) Sortie s(t)
t t
t1 t1+τ
1.5. Conséquence
Un système linéaire continu invariant peut être représenté par une équation différentielle à
coefficients constants.
2 - LES PRINCIPAUX MODELES DE COMPORTEMENT
Pour les systèmes automatiques réels, on se ramène au cas des SLCI en faisant les hypothèses
simplificatrices présentées ci-dessus. La comparaison du modèle avec la réalité permettra de
valider ou non les hypothèses proposées. Pour modéliser un SLCI, il est nécessaire de
déterminer l’équation reliant l'entrée e(t) (ou les entrées) et la sortie s(t). Un modèle de
comportement établi à partir d’une linéarisation d’un modèle de connaissance permet
d'aboutir généralement à une telle équation.
Florestan MATHURIN Page 2 sur 10
Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
Il est très utile de représenter un système complexe en schéma-bloc fonctionnel et de le
décomposer en sous-systèmes élémentaires plus simples car cette stratégie permet de
retrouver souvent des modèles de comportement bien connus (et présentés ci-dessous) pour
chaque sous-système élémentaire.
2.1. Modèle de comportement des systèmes les plus simples
Une grande partie des systèmes peut être modélisée par une constante, c'est à dire une
relation de proportionnalité directe entre l'entrée et la sortie : s(t) = K.e(t). La constante de
(2)
proportionnalité est alors directement le gain du système.
Fonction
transmettre et
adapter de la chaîne On peut modéliser par un gain la majorité :
d’énergie des éléments de transmission de puissance (2). Exemples : réducteur à roue et vis sans vis,
(3)
Fonction distribuer à engrenages, système vis-écrou...,
de la chaîne d’énergie des préactionneurs (3). Exemple : variateur, hacheur, …,
(4)
Fonction acquérir des capteurs (4). Exemples : potentiomètre, génératrice tachymétrique...
de la chaîne
d’information Exemples de systèmes pouvant être modélisé par un gain
Allongement Ressort Force Vitesse Vitesse Angle Tension
Réducteur Potentiomètre
d’entée de sortie
La relation reliant la force La relation reliant la vitesse La relation reliant la
exercée sur le ressort F à de rotation de sortie ωs à la tension de sortie U à
l'allongement Δx est vitesse de rotation d’entrée l’angle de réglage θ en
donnée par la relation : ωe est donnée par la relation : entrée est donnée par la
F=kressort.Δx où kressort est la ωs/ωe=–Ze/Zs où Ze et Zs sont relation : U = kp.θ où kp est
raideur du ressort. Le gain K le nombre de dents des deux le gain du potentiomètre.
du système est alors égal à éléments. Le gain K du
kressort. système est alors égal à Ze/Zs .
2.2. Modèle de comportement des systèmes du premier ordre
Un modèle plus élaboré, couramment rencontré, est le modèle dit du premier ordre. La forme
générale de l'équation différentielle caractéristique d'un système du premier ordre est :
d s(t)
. s(t) K.e(t) où : K est le gain statique du système.
dt
τ est la constante de temps.
Exemple : Moteur pas à pas se comportant comme un circuit RL
On s'intéresse à un circuit RL (résistance + bobine) couramment rencontré dans les circuits
électriques (filtres, moteur pas à pas, …).
i(t)
L
e(t) R u(t)
Réel Modèle
Florestan MATHURIN Page 3 sur 10
Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
d i(t)
Les équations électriques du circuit sont les suivantes : e(t) L. u(t) (1)
dt
u(t) R.i(t) (2)
L d u(t)
Soit e(t) . u(t) → On obƟent bien une équaƟon différenƟelle d'ordre 1.
R dt
L
La constante de temps vaut (en secondes) et le gain statique vaut 1.
R
Modèle de comportement des systèmes du second ordre
Un autre modèle très couramment rencontré est le modèle dit du second ordre. La forme
générale de l'équation différentielle caractéristique d'un système du second ordre est :
1 d2 s(t) z d s(t) K est le gain statique du système.
(5)
le coefficient . 2 . s(t) K.e(t) où :
d’amortissement z est 0 2
dt2 0 dt
toujours > 0
z est le coefficient d’amortissement (5).
(6)
la pulsation propre
non amortie du
ω0 est la pulsation propre non amortie
système ω0 est du système (6).
toujours > 0
Exemple : Système masse-ressort-amortisseur
On s'intéresse au mouvement d'une roue par rapport au châssis par l'intermédiaire d'un
système amortisseur ressort. Ce système peut être modélisé par une masse reliée en série à
un ressort et un amortisseur montés en parallèle.
F(t)
k M
x(t)
f
Réel : Système d’amortissement d’un Modèle : Schéma de modélisation du
quad système masse-ressort-amortisseur
On note F(t) la force exercée sur la masse M et x(t) la position de cette masse par rapport à
l'équilibre. La masse M est soumise :
à l'action F(t)
à l'action du ressort : -k.x(t)
dx(t)
à l'action de l'amortisseur : f.
dt
L’écriture du principe fondamental de la dynamique sur la masse M permet d’écrire :
d2x(t) dx(t) d2x(t) dx(t)
M. 2 f. k.x(t) F(t) Soit : M. 2 f. k.x(t) F(t)
dt dt dt dt
→ L'équaƟon obtenue est bien une équaƟon différenƟelle d'ordre 2.
k
La pulsation propre non amortie vaut 0 (radians/secondes), le coefficient
M
f 1
d’amortissement vaut z (sans unité) et le gain statique vaut K (m.N-1).
2. k.M k
Florestan MATHURIN Page 4 sur 10
Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
3 - MODELE DE COMPORTEMENT GENERAL DES SLCI ET DEMARCHE DE RESOLUTION DE
L’EQUATION DIFFERENTIELLE
Un SLCI est modélisé par un modèle de comportement représenté par une équation
différentielle d'ordre n reliant la sortie s(t) à l’entrée e(t). Elle est obtenue par la combinaison
des différentes équations différentielles issues des modèles de comportement des sous-
systèmes élémentaires constituant le schéma-bloc fonctionnel du système global. Elle s'écrit
sous la forme générale :
dn s(t) dm e(t)
an . ... a0 . s(t) b m . ... b0 . e(t)
dtn dtm
e(t) s(t) Modèle de comportement sous forme
d’équation différentielle
Les systèmes étudiés impliquent que n ≥ m afin de respecter la condition de causalité du
système (n est appelé l’ordre du système).
Une fois cette équation obtenue, deux questions peuvent alors se poser :
Comment prendre en compte la modification de modélisation d'un composant
(moteur par exemple) de manière aisée ?
Comment obtenir la réponse du système pour une entrée quelconque afin d'analyser
les performances globales du système ?
On constate dans ces deux situations que l'écriture sous forme différentielle du SLCI n'est pas
adaptée pour une résolution à la main car la recherche de la solution de l'équation
différentielle reste difficile et trop complexe pour des équations d'ordre élevé ou lorsque la
consigne e(t) est de forme compliquée.
L'outil privilégié pour traiter un SLCI de manière efficace, tant pour analyser le comportement,
que pour résoudre une équation d'ordre quelconque, est la transformation de Laplace qui
permet d'obtenir une relation algébrique entre la sortie et l'entrée.
L’intérêt principal de cette méthode est de manipuler algébriquement des polynômes plutôt
qu’une équation différentielle. Pour cela il faut :
utiliser la transformée de Laplace pour passer du domaine temporel vers le domaine
de Laplace
manipuler proprement des polynômes pour mettre en forme la solution S(p)
utiliser la transformée inverse de Laplace une fois la solution S(p) mise en forme, pour
rebasculer du domaine de Laplace vers le domaine temporel.
Méthode de résolution «classique » Méthode de résolution en automatique
Equation s1(t) réponse Domaine temporel en t Domaine de Laplace en p
différentielle qui caractérise
nd Equation différentielle
sans 2 le régime Equation polynomiale
nd
membre transitoire avec 2 membre avec en p → E(p), S(p) et
e(t) et s(t) Fonction de Transfert
Equation différentielle Solution
nd
avec 2 membre avec Transformée de Laplace Manipulations
s(t) = s1(t) + s2(t)
s(t) et e(t) algébriques
Transformée inverse
s2(t) réponse
Equation qui caractérise Solution S(p)
particulière Solution s(t) décomposée en
le régime
permanent éléments simples
Florestan MATHURIN Page 5 sur 10
Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
4 - CALCUL SYMBOLIQUE - TRANSFORMEE DE LAPLACE ET TRANSFORMEE INVERSE
Ce chapitre n’a absolument pas pour ambition de présenter la théorie de la transformée de
Laplace avec toute la rigueur mathématique associée mais plutôt de présenter les propriétés
utiles de cette transformation pour son utilisation comme un outil de résolution des
équations différentielles bien adapté à l’automatique.
4.1. Définition de la transformée de Laplace
La transformée de Laplace de la fonction f(t), telle que f(t)=0 pour t<0 est :
L (f(t)) = F(p) 0 f(t).e-pt.dt où p est une variable complexe.
Cette transformation permet de passer du domaine temporel (variable en t) vers le domaine
symbolique de Laplace (variable en p).
Dans la pratique, on ne calcule que les transformées de Laplace de fonctions causales,
c'est-à-dire telles que f(t) = 0 pour t < 0. Ces fonctions f représentent des grandeurs
physiques: intensité, température, effort, vitesse,...
F(p) n’existe que si l'intégrale a un sens et converge. Dans les cas rencontrés en SII, les
conditions d'existence et de convergence seront toujours réunies.
La variable p peut aussi être noté avec la lettre s.
On a l'habitude de noter la transformée de Laplace par une majuscule quand cela est possible
(e(t) → E(p), s(t) → S(p)), Cependant, pour ne pas alourdir les notaƟons, on confond parfois
les notations si la grandeur originelle est déjà en majuscule (C(t) → C(p)).
Exemple : Transformée de Laplace de l’échelon unitaire u(t) = 1 pour t>0
u(t) U(p) = L (u(t)) = 0 u(t).e-pt.dt =
0
e-pt.dt
e-pt 1
U(p) = =
t p 0 p
4.2. Tableau des transformées de Laplace usuelles
Dans la pratique on évite au maximum de calculer F(p) par la définition, on doit donc se servir
directement des résultats de transformées de Laplace pour les fonctions usuelles lors de la
résolution des problèmes.
f(t) avec f(t)=0 pour t<0 F(p) f(t) avec f(t)=0 pour t<0 F(p)
(t) t.u(t) 1
1
impulsion de Dirac fonction rampe p2
u(t) 1 n!
tn.u(t)
échelon unitaire p pn1
1 n!
e-at.u(t) tne-at.u(t)
pa (p a)n1
p
sin(t).u(t) cos(t).u(t)
p 2
2
p 2
2
pa
e-at.sin(t).u(t) e-at.cos(t).u(t)
(p a)
2 2
(p a)2 2
Florestan MATHURIN Page 6 sur 10
Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
Les transformées de Laplace de l'impulsion de Dirac, de l'échelon, de la rampe et de la
fonction exponentielle sont à connaître par cœur car elles sont très utilisées !!!
4.3. Propriétés essentielles
Conditions de Heaviside
On dit qu'une fonction du temps f(t) vérifie les conditions de Heaviside si elle vérifie :
f (0 ) 0, f' (0 ) 0, f' ' (0 ) 0, ... C'est à dire si les conditions initiales sont nulles.
Unicité
A une fonction f(t) correspond une fonction F(p) unique,
à une fonction F(p) correspond une fonction f(t) unique.
(7)
Cette propriété est Linéarité (7)
utilisée constamment
de manière naturelle.
Soit L (x (t)) = X (p), L (x (t)) = X (p), A et B deux constantes, alors :
1 1 2 2
L (A.x (t) + B.x (t)) = A. L (x (t)) + B. L (x (t)) = A.X (p) + B. X (p)
1 2 1 2 1 2
Transformée de la dérivée
Pour la dérivée première : L dtd f(t) p.F(p) f(0 )
d 2
2 d
Pour la dérivée seconde : L 2 f (t) p .F(p) p.f(0 ) f (0 )
dt dt
dn n
En généralisant on a dans les conditions de Heaviside : L n f(t) p .F(p)
dt
Dériver par rapport à t dans le domaine temporel revient à multiplier par p dans le domaine
dn
symbolique dans les conditions de Heaviside : n
pn
dt
d2x(t) dx(t)
Exemple : transformation de l’équation différentielle a2 2
a1 a0x(t) 0
dt dt
d2x(t) dx(t) L
a2 a1 a0x(t) 0 X(p)[a2p2 a1p a0 ] 0 dans les conditions de
dt2 dt
Heaviside.
Transformée de l’intégrale
L f(t).dt F(pp) pour des conditions initiales nulles.
Intégrer dans le domaine temporel revient à diviser par p dans le domaine symbolique dans
1
les conditions de Heaviside :
p
Exemple : Passage d'une vitesse à une position (intégrateur)
L (p)
(t) (t) dt (p) dans les conditions de Heaviside.
p
Florestan MATHURIN Page 7 sur 10
Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
4.4. Théorèmes pratiques
Théorème de la valeur initiale et de la valeur finale
Lorsqu'on veut obtenir des informations sur la fonction temporelle f(t) mais que l'on ne
souhaite pas déterminer la transformée inverse de F(p), on peut utiliser les deux théorèmes
suivants :
le théorème de la valeur initiale : lim f(t) lim p.F(p)
t 0 p
le théorème de la valeur finale : lim f(t) lim p.F(p)
t p 0
Le théorème de la valeur finale est le plus utile des deux car il permet de déterminer le régime
permanent sans faire le calcul complet (et pénible) de la transformée de Laplace inverse.
Théorème du retard
f(t)
Soit une fonction f(t) de transformée de Laplace F(p).
g(t) peut être déduite de f(t) en lui faisant subir un décalage
t temporel (ou retard) de valeur T.
g(t) Par conséquent G(p) peut être calculée en exploitant ce décalage
temporel, c’est le théorème du retard :
T t
G(p) = e-Tp. F(p) où e-Tp correspond à l’opérateur retard.
Tout signal peut s'écrire comme la somme de signaux élémentaires que l’on peut coupler avec
le théorème du retard de fonctions. On est alors en mesure de modéliser tout type d'entrée.
Théorème de l’amortissement :
L e-at .f(t) F(p a)
4.5. Décomposition en éléments simples et transformation inverse
La transformation de Laplace inverse consiste à rechercher la fonction temporelle f(t) qui
correspond à une fonction F(p) donnée. Dans les problèmes d’automatique, F(p) se présente
sous la forme d’une fraction rationnelle en p qu’il faut décomposer en éléments simples pour
retrouver les fractions élémentaires du tableau présenté paragraphe 3.2. Cette manipulation
permet d’identifier la transformée inverse de chaque fraction élémentaire simplement par
« lecture » du tableau du paragraphe 3.2. La fonction f(t) correspond au final à une somme de
fonctions temporelles élémentaires.
p2 A B
Exemple : La fonction F(p) se présente sous la forme avec
(p 5)(p 10) p 5 p 10
3 8
A et B lors de sa décomposition en éléments simples. On applique ensuite la
5 5
transformée inverse de Laplace pour obtenir f(t) :
-1
L 3 8
f (t) .e 5t .e 10 t .
5 5
Méthodes de décomposition en éléments simples des fonctions F(p) (voir annexe TD 04)
Florestan MATHURIN Page 8 sur 10
Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
5 - REPRESENTATION DES SLCI PAR FONCTION DE TRANSFERT
La transformation de l'équation différentielle du SLCI en équation polynomiale permet de
déterminer une fonction appelée fonction de transfert qui caractérise le comportement du
SLCI.
5.1. Notion de fonction de transfert
Si on applique la transformation de Laplace sur l’équation différentielle d’un système
(8)
où e(t) correspond dns(t) dme(t)
toujours à l'entrée du an . n ... a0 .s(t) bm . m ... b0 .e(t) (8), on obtient pour des conditions initiales nulles
système et s(t) à la dt dt
sortie du système : (an .p ... a0 ).S(p) (bm .pm ... b 0 ).E(p) .
n
(9) (9)
on peut aussi On appelle fonction de transfert H(p) du système la relation dans le domaine symbolique
utiliser le terme
S(p) bm .pm ... b 0
transmittance telle que H(p) .
E(p) an .pn ... a0
Lors de l’étude de SLCI, on se place toujours dans le cas de conditions initiales nulles
(conditions de Heaviside) car le niveau initial du système importe peu et que c’est plutôt la
réaction à une excitation à partir d'un état stable que l'on souhaite étudier.
On peut toujours se ramener à des conditions initiales nulles moyennant un changement
d'origine.
La fonction de transfert caractérise le comportement intrinsèque du système et ne
dépend ni de l'entrée, ni de la sortie.
Dans le domaine symbolique, la relation entre l'entrée et la sortie est linéaire :
S(p) H(p).E(p)
Pour représenter le système décrit par la fonction de transfert H(p), on utilise des blocs.
Un bloc peut représenter un composant ou bien un sous-système ou également un
système complexe.
Le schéma-bloc fonctionnel doit être modifié en schéma-bloc pour lequel les noms des
composants sont remplacés par la fonction de transfert correspondante et les variables
temporelles sont remplacées par les variables symboliques (E(p), S(p)...).
e(t) Système s(t) E(p) S(p)
H(p)
d’équation h(t)
5.2. Définition de la fonction de transfert sous forme canonique
Les fonctions de transfert se présenteront toujours sous forme de fraction rationnelle, mise
sous la forme suivante que l’on appelle forme canonique :
S(p) K.(1 b'1 .p ... b'm .pm )
H(p)
E(p) p .(1 a'1 .p ... a'n .pn )
avec α : classe du système (représente le nombre d’intégration dans le système α ≥ 0)
n : ordre du système, identique à l’ordre de l’équation différentielle
K : gain statique (permet de connaître le comportement du système en régime
permanent). K possède une unité (unité de la variable de sortie / unité de la variable
d’entrée).
Florestan MATHURIN Page 9 sur 10
Cours 04 - Modélisation des SLCI et Calcul Symbolique Lycée Fermat Toulouse - CPGE MPSI/PCSI
5.3. Notion de pôle et de zéro
On appelle pôles toutes racines du dénominateur de la fonction de transfert. On appelle zéros
toutes racines du numérateur de la fonction de transfert.
Le comportement dynamique du système est entièrement défini par les pôles et les zéros de
(10)
la fonction de transfert car ils permettent d’analyser le comportement du système sans
on s’en servira par
calculer la réponse temporelle (10).
exemple en PSI/MP
pour étudier la Im Pôle double
s(t)
stabilité des SLCI. INSTABLE
t
STABLE
s(t)
STABLE Pôle simple
t s(t) QUASI
s(t)
t INSTABLE
t
Pôles
conjugués
Pôles Pôles
conjugués conjugués
Re
Pôles
conjugués
s(t) INSTABLE
STABLE t
s(t)
t STABLE Pôle multiple
s(t) s(t) INSTABLE
INSTABLE
t t s(t)
Pôle simple
t
s(t) QUASI
INSTABLE
t
(11)
extrait du cours de Allure de la réponse à l’impulsion de Dirac selon la position des pôles de la FTBF d’un
PSI/MP. système(11)
Florestan MATHURIN Page 10 sur 10
Vous aimerez peut-être aussi
- Compte Rendu CollisionsDocument9 pagesCompte Rendu CollisionsVladimir SavuPas encore d'évaluation
- Echantillonage Et QuantificationDocument28 pagesEchantillonage Et Quantificationyoussef elmarghdiPas encore d'évaluation
- Enedis Brochure Tarifaire Turpe6Document15 pagesEnedis Brochure Tarifaire Turpe6jeanostwindPas encore d'évaluation
- 2-Modelisation Temporelle Des SLCI (Partie2)Document4 pages2-Modelisation Temporelle Des SLCI (Partie2)saraPas encore d'évaluation
- Instrumentation Et Regulation en 30 Fiches BTSDocument8 pagesInstrumentation Et Regulation en 30 Fiches BTSabdelhadi ennajihPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- TP: Transformée de Fourier Discrète: M1 Info: Bases Du Traitement Du SignalDocument2 pagesTP: Transformée de Fourier Discrète: M1 Info: Bases Du Traitement Du Signallange681Pas encore d'évaluation
- TP3 Ass 21-22-CopierDocument4 pagesTP3 Ass 21-22-CopierMohammed BenmiaPas encore d'évaluation
- AutomatiqueDocument99 pagesAutomatiquebastaouiiPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- A2. DérivabilitéDocument7 pagesA2. DérivabilitéSamou_haaPas encore d'évaluation
- 4.1 S Erie de FourierDocument13 pages4.1 S Erie de FourierJamila DebayaPas encore d'évaluation
- TP Syst LogiqueDocument7 pagesTP Syst LogiqueShaïma Ben SheikhPas encore d'évaluation
- 1SIN TP10 Arduino Les Feux de CarrefourDocument4 pages1SIN TP10 Arduino Les Feux de CarrefourOussama ChahirPas encore d'évaluation
- TP1°Document12 pagesTP1°Oussama EttahiriPas encore d'évaluation
- Examen 2019Document2 pagesExamen 2019Wï ÄmPas encore d'évaluation
- CR Auto BNDocument25 pagesCR Auto BNOUTMANE FERNOUCHPas encore d'évaluation
- Identification - 1er - 2nd - Ordre - ElvDocument5 pagesIdentification - 1er - 2nd - Ordre - Elvnohaila noha100% (1)
- Chapitre2 Critère de Performance D'une RégulationDocument46 pagesChapitre2 Critère de Performance D'une RégulationAYOUB RIAD100% (2)
- Automatisme CombinatoireDocument19 pagesAutomatisme Combinatoiresami1523Pas encore d'évaluation
- DS 15 16 1Document5 pagesDS 15 16 1Mohammed MarzougPas encore d'évaluation
- Compte Rendu TP DSP 2 PDFDocument6 pagesCompte Rendu TP DSP 2 PDFHsen MacheyPas encore d'évaluation
- Catalogue de Commandes MATLABDocument8 pagesCatalogue de Commandes MATLABMohamed Ghassen BoudrigaPas encore d'évaluation
- Compte Rendu ElectrothecniqueDocument13 pagesCompte Rendu ElectrothecniqueBadreddinePas encore d'évaluation
- TD4 - Reponse Frequentielle - Solution2021iDocument8 pagesTD4 - Reponse Frequentielle - Solution2021iAmir DridiPas encore d'évaluation
- Transforme de FourierDocument19 pagesTransforme de FourierakitaPas encore d'évaluation
- Cours Asservissement Regulation PDFDocument7 pagesCours Asservissement Regulation PDFWassim Djennane100% (1)
- DS 14 15 1Document5 pagesDS 14 15 1Mohammed MarzougPas encore d'évaluation
- Cours Reponse TemporelleDocument9 pagesCours Reponse TemporelleAbdelhadi AZPas encore d'évaluation
- Automatique Continu Chap 1Document74 pagesAutomatique Continu Chap 1badrPas encore d'évaluation
- Chapitre 3. Analyse de FourierDocument12 pagesChapitre 3. Analyse de FourierBeyaz Çiçek100% (1)
- COURS M9 - InstrumentationDocument64 pagesCOURS M9 - Instrumentationfarid regraguiPas encore d'évaluation
- Compte Rendu: Cole Ationale OlytechniqueDocument11 pagesCompte Rendu: Cole Ationale OlytechniqueSoheib BoukanfoudaPas encore d'évaluation
- Exemple de Tracé de Bode-1Document15 pagesExemple de Tracé de Bode-1donald youngouaPas encore d'évaluation
- Chapitre 2 Transformee LaplaceDocument10 pagesChapitre 2 Transformee Laplacemouna100% (1)
- Modélisation, Simulation Et Commande Des Processus ÉlectriqueDocument30 pagesModélisation, Simulation Et Commande Des Processus ÉlectriqueMustapha El MetouiPas encore d'évaluation
- TD3 Modelisation Identification 2021Document5 pagesTD3 Modelisation Identification 2021saidPas encore d'évaluation
- Corrigé Page 19Document7 pagesCorrigé Page 19nesli hanePas encore d'évaluation
- Livre Programme RobotiqueDocument60 pagesLivre Programme RobotiqueLebongoPas encore d'évaluation
- Wa0000. 1 1 1Document66 pagesWa0000. 1 1 1olessongoharlyPas encore d'évaluation
- Td4 CorrectionDocument2 pagesTd4 CorrectionFadwaPas encore d'évaluation
- TD VibrationDocument2 pagesTD VibrationAbdel-aziz Ahmat Timan0% (1)
- Hydraulique (PHY 324)Document39 pagesHydraulique (PHY 324)Jean-François Eyaga TabiPas encore d'évaluation
- Tp093sallenkeybp2 PDFDocument4 pagesTp093sallenkeybp2 PDFmarouan86Pas encore d'évaluation
- Chapitre 2 Etude Des Systemes LineairesDocument27 pagesChapitre 2 Etude Des Systemes LineairesWardat Eljanoud SouklahadPas encore d'évaluation
- Cours de L'analyse NumeriqueDocument123 pagesCours de L'analyse NumeriqueLghazi Oumssad100% (1)
- TD 35 Corrigé - Systèmes Séquentiels - GRAFCET - Structure Particulière - Grafcet Partiel - Compteur PDFDocument4 pagesTD 35 Corrigé - Systèmes Séquentiels - GRAFCET - Structure Particulière - Grafcet Partiel - Compteur PDFDivin MakitaPas encore d'évaluation
- Asservissement Matlab SimulinkDocument17 pagesAsservissement Matlab SimulinkSerge Hermann Ménéas100% (1)
- Signaux Physiques - Chapitre 2-Theoremes de Bases D'analyses de Circuits Electriques-1 PDFDocument38 pagesSignaux Physiques - Chapitre 2-Theoremes de Bases D'analyses de Circuits Electriques-1 PDFDavid Konan100% (2)
- Méthodes de Simulation (Simulink)Document30 pagesMéthodes de Simulation (Simulink)Abdelbaki MahfoudiPas encore d'évaluation
- Matlab-Tp2-1difference FiniesDocument15 pagesMatlab-Tp2-1difference Finiesoussama haj mansour100% (1)
- TD1 Metrologie - GPSDocument7 pagesTD1 Metrologie - GPSHibatallah BENALLAPas encore d'évaluation
- Cours Part 4 Capteurs de TempératureDocument17 pagesCours Part 4 Capteurs de TempératureMoussa Amadou AlmoustaphaPas encore d'évaluation
- A Series Numeriques FicheDocument2 pagesA Series Numeriques FicheMed Mehdi LaazizPas encore d'évaluation
- Formalisme de LagrangeDocument20 pagesFormalisme de LagrangeKamel AbboudiPas encore d'évaluation
- Correction - TD Regulation Des ProcedesDocument26 pagesCorrection - TD Regulation Des ProcedesYassineElOmariPas encore d'évaluation
- Chapitre 3Document9 pagesChapitre 3anasPas encore d'évaluation
- TD1 ContinuDocument4 pagesTD1 Continudhaouadi hazemPas encore d'évaluation
- IliasssDocument13 pagesIliasssBalalaŇaŖîf100% (1)
- Integration Scei 2020Document2 pagesIntegration Scei 2020BalalaŇaŖîfPas encore d'évaluation
- CcinpDocument12 pagesCcinpBalalaŇaŖîfPas encore d'évaluation
- ENSIBSDocument13 pagesENSIBSBalalaŇaŖîfPas encore d'évaluation
- I - ResultatsDocument1 pageI - ResultatsBalalaŇaŖîfPas encore d'évaluation
- PolytechDocument7 pagesPolytechBalalaŇaŖîfPas encore d'évaluation
- Génie InfoDocument2 pagesGénie InfoBalalaŇaŖîfPas encore d'évaluation
- Plaquette CCINPDocument8 pagesPlaquette CCINPBalalaŇaŖîfPas encore d'évaluation
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- CNC Si MP 2019Document25 pagesCNC Si MP 2019BalalaŇaŖîfPas encore d'évaluation
- Cours 09Document9 pagesCours 09BalalaŇaŖîfPas encore d'évaluation
- Cours 10Document4 pagesCours 10BalalaŇaŖîfPas encore d'évaluation
- Cours 14Document4 pagesCours 14BalalaŇaŖîfPas encore d'évaluation
- 16 Poster Int paraDocument1 page16 Poster Int paraBalalaŇaŖîfPas encore d'évaluation
- Exo MatricesDocument3 pagesExo MatricesBalalaŇaŖîfPas encore d'évaluation
- 03 Poster ReductionDocument1 page03 Poster ReductionBalalaŇaŖîfPas encore d'évaluation
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (8)
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- Exercices Entrainement Électriques 2021Document2 pagesExercices Entrainement Électriques 2021bellalPas encore d'évaluation
- Chapitre 1 Fondements de La Thermodynamique Classique STDocument53 pagesChapitre 1 Fondements de La Thermodynamique Classique STArmel YmgPas encore d'évaluation
- Objectif N°3 Sytème Photovoltaïques Raccordées Au RéseauDocument24 pagesObjectif N°3 Sytème Photovoltaïques Raccordées Au RéseauWeam MouloudiPas encore d'évaluation
- 01 Separation Gravimetrique C01Document1 page01 Separation Gravimetrique C01Chihab Zerfaoui100% (1)
- CHIMIEDocument4 pagesCHIMIEbrinimed06gmail.comPas encore d'évaluation
- TD 1 VibrationsDocument27 pagesTD 1 Vibrationskaoutar soumatiPas encore d'évaluation
- Les Series+solution Elec s2 PDFDocument21 pagesLes Series+solution Elec s2 PDFCamus EinsteimPas encore d'évaluation
- Tipe 2.1 PDFDocument9 pagesTipe 2.1 PDFVictor BouchartPas encore d'évaluation
- Aermec Depl PAC FRDocument48 pagesAermec Depl PAC FRRim OuachaniPas encore d'évaluation
- Exercices Ondes Mecaniques Progressives PeriodiquesDocument5 pagesExercices Ondes Mecaniques Progressives PeriodiquesMoulayMoulyPas encore d'évaluation
- Actionneurs PneumatiquesDocument15 pagesActionneurs Pneumatiques3atrous elbahrPas encore d'évaluation
- Capture D'écran . 2024-02-25 À 15.32.51Document1 pageCapture D'écran . 2024-02-25 À 15.32.514yrtkys2mpPas encore d'évaluation
- P Bts13 CorrDocument3 pagesP Bts13 CorrAyoub OukhalekPas encore d'évaluation
- MRC CH 08 335 - Ovf10 - Novembre 1996Document26 pagesMRC CH 08 335 - Ovf10 - Novembre 1996abouts smailPas encore d'évaluation
- Chapitre 3 - Méthodes de Calcul Des Fréquences Et ModesDocument8 pagesChapitre 3 - Méthodes de Calcul Des Fréquences Et ModesMackenzie MoranPas encore d'évaluation
- Chapitre 1 Propriétés Des LiquidesDocument4 pagesChapitre 1 Propriétés Des LiquidesDjellal Zahariya mohammadPas encore d'évaluation
- Varset Direct (Remplacé Par VarSet LV) - 65885Document2 pagesVarset Direct (Remplacé Par VarSet LV) - 65885Imane KhaliPas encore d'évaluation
- "Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchDocument3 pages"Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchAlexis James0% (1)
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- Equilibreuse Modelisation 2hDocument9 pagesEquilibreuse Modelisation 2hbottiotherPas encore d'évaluation
- Efficacité Énergétique??Document17 pagesEfficacité Énergétique??yassinePas encore d'évaluation
- Livre Prof spc4 Chap05Document23 pagesLivre Prof spc4 Chap05mahouachi mounaPas encore d'évaluation
- L2S4 - Electromag - TD3 - CopieDocument3 pagesL2S4 - Electromag - TD3 - CopieElisée Dago100% (1)
- Pompe À ChaleurDocument52 pagesPompe À ChaleurKa DerPas encore d'évaluation
- Notes MecafluDocument15 pagesNotes MecafluAbdelhafid MoumnaPas encore d'évaluation
- KHEDER NazimDocument26 pagesKHEDER Nazimbouba.habouba36Pas encore d'évaluation
- DomotiqueDocument54 pagesDomotiquechantalbiyeme01Pas encore d'évaluation