Vous aimerez peut-être aussi
- Résumé-Cours-Guidage en Rotation - Guidage en Translation PDFDocument62 pagesRésumé-Cours-Guidage en Rotation - Guidage en Translation PDFTaoufik Ben Hadid68% (19)
- Travaux Dirigés 1 Cinématique CorrDocument6 pagesTravaux Dirigés 1 Cinématique CorrAmal FatouhPas encore d'évaluation
- Exercice Analyse Cinématique D'un MécanismeDocument6 pagesExercice Analyse Cinématique D'un Mécanismeyassine safraouiPas encore d'évaluation
- Exemple Fiche EntretienDocument2 pagesExemple Fiche EntretienwoulkanPas encore d'évaluation
- Catalog O Ring Handbook PTD5705 FRDocument164 pagesCatalog O Ring Handbook PTD5705 FRwoulkanPas encore d'évaluation
- Modélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxDocument7 pagesModélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxOkacha AmraouyPas encore d'évaluation
- Représentation GraphiqueDocument7 pagesReprésentation GraphiquetaiebshowPas encore d'évaluation
- DM Quille PendulaireDocument5 pagesDM Quille PendulaireFilouPas encore d'évaluation
- Ci Bac Pro Mei v2Document6 pagesCi Bac Pro Mei v2fatihamPas encore d'évaluation
- P - Etude6 - Les LiaisonsDocument4 pagesP - Etude6 - Les LiaisonsSamsun GalaxPas encore d'évaluation
- Devoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagDocument2 pagesDevoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagSameh RomdhaniPas encore d'évaluation
- Modelisation Cinematique (Compressé)Document31 pagesModelisation Cinematique (Compressé)Larbi ElbakkaliPas encore d'évaluation
- Chaîne D'energie Fonction Transmettre Solidworks Doc-Prof MoukhtariDocument12 pagesChaîne D'energie Fonction Transmettre Solidworks Doc-Prof MoukhtariELMustaphaELMoukhtariPas encore d'évaluation
- Ch1 - Modelisation Des Liaisons-Prof Page 3-7Document8 pagesCh1 - Modelisation Des Liaisons-Prof Page 3-7Sheikh Al-shoteriPas encore d'évaluation
- Cours MicrDocument30 pagesCours MicrDOUNIAPas encore d'évaluation
- (TP01c) Serre JointDocument4 pages(TP01c) Serre JointraobenPas encore d'évaluation
- Devoir de Controle N3-1AS-2014-Blocage Des TubesDocument3 pagesDevoir de Controle N3-1AS-2014-Blocage Des TubesomatrPas encore d'évaluation
- Liaison EncastrementDocument18 pagesLiaison Encastrementkhocine100% (1)
- Liaison Hélicoidale ProfDocument12 pagesLiaison Hélicoidale ProftounsiPas encore d'évaluation
- MODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Document10 pagesMODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Andreas NGASTE100% (1)
- 1TC-Devoir de Controle Numéro 1 2020-2021Document4 pages1TC-Devoir de Controle Numéro 1 2020-2021tayahiPas encore d'évaluation
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiPas encore d'évaluation
- Les Liaisons Mécaniques: I. Définition III. Degrés de LibertéDocument2 pagesLes Liaisons Mécaniques: I. Définition III. Degrés de Libertéjawaher100% (2)
- (M06b) Statique GraphiqueDocument2 pages(M06b) Statique GraphiqueFaustin Kouassi100% (1)
- Fonction Assemb CoursDocument5 pagesFonction Assemb CoursHanane TounsiPas encore d'évaluation
- Devoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument4 pagesDevoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotArfaoui AymenPas encore d'évaluation
- TP Treuil EleveDocument6 pagesTP Treuil ElevemidounPas encore d'évaluation
- Schéma CinématiqueDocument41 pagesSchéma CinématiquesadikiPas encore d'évaluation
- Devoir de Synthese #2: Travail DemandéDocument4 pagesDevoir de Synthese #2: Travail DemandéBouabdellaoui saif ennasr100% (1)
- 2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageDocument4 pages2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageAdam BensaidPas encore d'évaluation
- Archiveur Multimedia MecaniqueDocument3 pagesArchiveur Multimedia Mecaniquechaouch.najehPas encore d'évaluation
- Résumé-De-Cours Dessin D'ensembleDocument9 pagesRésumé-De-Cours Dessin D'ensembleatika kabouyaPas encore d'évaluation
- Exercice ReducteurDocument8 pagesExercice ReducteurGyPas encore d'évaluation
- TCP-05-Rep-Projection-Orthogonale P 44Document1 pageTCP-05-Rep-Projection-Orthogonale P 44Jujo BugaPas encore d'évaluation
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument8 pagesCours Modelisation Des Liaisons entayoub100% (1)
- TD-Dispositif D AblocageDocument1 pageTD-Dispositif D AblocageMama Samba SALLPas encore d'évaluation
- Mecanisme de Transformation de Mouvement Bielle ManivelleDocument3 pagesMecanisme de Transformation de Mouvement Bielle Manivellesahl silverPas encore d'évaluation
- TD Doc ÉlèveDocument12 pagesTD Doc ÉlèveMurakamiensPas encore d'évaluation
- Chapitre 2 - Partie 1 - CSMTDocument28 pagesChapitre 2 - Partie 1 - CSMTsalman wardiPas encore d'évaluation
- Guidage en Rotation CorrDocument9 pagesGuidage en Rotation CorrrahmaboufalghaPas encore d'évaluation
- Dossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsDocument3 pagesDossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsMortadha RabahPas encore d'évaluation
- 1-Modelisation Et Parametrage Des Mecanismes - Assemble - OdtDocument12 pages1-Modelisation Et Parametrage Des Mecanismes - Assemble - Odtyassinebouazzi100% (1)
- DTDocument3 pagesDTMrnadhir MecaniquePas encore d'évaluation
- TD ÉlèveDocument4 pagesTD ÉlèveSamba SallPas encore d'évaluation
- Fiche PerspectiveDocument4 pagesFiche Perspectivemohamed fall0% (1)
- App3 Rep STE STM SMB PDFDocument10 pagesApp3 Rep STE STM SMB PDFNSANGOUPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- 6 Schematisation PDFDocument10 pages6 Schematisation PDFHanane TounsiPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Bride de Serrage Bride de Serrage - 1ère AS (2011-2012) MR HENI ABDELLATIF PDFDocument3 pagesDevoir de Contrôle N°2 - Technologie Bride de Serrage Bride de Serrage - 1ère AS (2011-2012) MR HENI ABDELLATIF PDFAnta diama sambePas encore d'évaluation
- 111 Dessin Industriel Normes ISO ANSI Rappel (1dpp) PDFDocument46 pages111 Dessin Industriel Normes ISO ANSI Rappel (1dpp) PDFYoussef YouriPas encore d'évaluation
- 207 0 Serre Joint Sous Ens 1Document3 pages207 0 Serre Joint Sous Ens 1mouad hamdaniPas encore d'évaluation
- TD20 Scie SauteuseDocument2 pagesTD20 Scie SauteuseNabiha LabidiPas encore d'évaluation
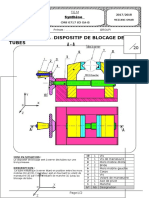
- Devoir de Contrôle N°2 - Technologie - DISPOSITIF DE BLOCAGE DES TUBES - 2ème Technique (2015-2016) MR Gassoumi TarekDocument4 pagesDevoir de Contrôle N°2 - Technologie - DISPOSITIF DE BLOCAGE DES TUBES - 2ème Technique (2015-2016) MR Gassoumi Tarekhayet debbichPas encore d'évaluation
- EXBEPDocument4 pagesEXBEPBaathie Sarr100% (1)
- Transm TCTDocument9 pagesTransm TCTMohamed LarbiPas encore d'évaluation
- TD 30 - Représentation D'une Fonction Logique PDFDocument4 pagesTD 30 - Représentation D'une Fonction Logique PDFbhs channelPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFDocument7 pagesDevoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFadnenPas encore d'évaluation
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had50% (2)
- GUIDAGE EN ROTATION ÉlèveDocument21 pagesGUIDAGE EN ROTATION ÉlèveKahri Youssef100% (1)
- Numeration EleecDocument21 pagesNumeration EleecSalif NanaPas encore d'évaluation
- 2-Devoir de Controle N1-2AS-2021.31Document4 pages2-Devoir de Controle N1-2AS-2021.31Youssef Aouadi100% (1)
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapePas encore d'évaluation
- Cours EleveDocument4 pagesCours EleveMahama KaborePas encore d'évaluation
- DossiertravailDocument9 pagesDossiertravailMENGUE Benjamin BienvenuPas encore d'évaluation
- Liaisons 2021 DistancielDocument4 pagesLiaisons 2021 DistancielFreezeXPas encore d'évaluation
- Demande de Stage Un Modele de Lettre de MotivationDocument1 pageDemande de Stage Un Modele de Lettre de MotivationLamia67% (3)
- Pmpe A CarburantDocument5 pagesPmpe A CarburantwoulkanPas encore d'évaluation
- 1 Schema Reunion EfifcaceDocument6 pages1 Schema Reunion EfifcacewoulkanPas encore d'évaluation
- American - Moteur Plaque CUMMINSDocument1 pageAmerican - Moteur Plaque CUMMINSwoulkanPas encore d'évaluation
- Palme D'or - Wikipédia PDFDocument14 pagesPalme D'or - Wikipédia PDFwoulkanPas encore d'évaluation
- Palme D'or - Wikipédia PDFDocument14 pagesPalme D'or - Wikipédia PDFwoulkanPas encore d'évaluation
- Le Monde Du Silence (Film) - WikipédiaDocument5 pagesLe Monde Du Silence (Film) - WikipédiawoulkanPas encore d'évaluation
- Variateur de Vitesse A CourroieDocument4 pagesVariateur de Vitesse A Courroiewoulkan100% (1)
- Wikipédia-L'encyclopédie Libre PDFDocument3 pagesWikipédia-L'encyclopédie Libre PDFwoulkanPas encore d'évaluation
- Arvicola AmphibiusDocument9 pagesArvicola AmphibiuswoulkanPas encore d'évaluation
- Thyristor WikiDocument11 pagesThyristor WikiwoulkanPas encore d'évaluation
- Méthodes Et Couples de SerrageDocument6 pagesMéthodes Et Couples de SerragewoulkanPas encore d'évaluation
- Permis de Conduire&pDocument14 pagesPermis de Conduire&pwoulkanPas encore d'évaluation
- Applications Tolerances Et AjustementsDocument5 pagesApplications Tolerances Et AjustementswoulkanPas encore d'évaluation
- Elfi Dic2 2019Document211 pagesElfi Dic2 2019IbrahimPas encore d'évaluation
- Ele8203 Tp4 DynDocument7 pagesEle8203 Tp4 Dynnadir hammadiPas encore d'évaluation
- TD1 EngrenagesDocument6 pagesTD1 EngrenagesYoussefPas encore d'évaluation
- Cours DC3 - M2 - Modéliser Et Schématiser Le Comportement Cinématique PDFDocument17 pagesCours DC3 - M2 - Modéliser Et Schématiser Le Comportement Cinématique PDFMOHSSINE KOUSSPas encore d'évaluation
- CinématiqueSolide CoursTD ElevesDocument8 pagesCinématiqueSolide CoursTD Elevescyrinekrichen24Pas encore d'évaluation
- Mon Tipe 4Document16 pagesMon Tipe 4ۥٰ ۥٰPas encore d'évaluation
- MSSR - 3-TD Pompe Prise Camion CorrectionDocument8 pagesMSSR - 3-TD Pompe Prise Camion Correctionpierre chantelotPas encore d'évaluation
- Semestre 2 DS 1 2008-2009 Leve Personne OriorDocument8 pagesSemestre 2 DS 1 2008-2009 Leve Personne OriorKhawla BkPas encore d'évaluation
- TD2 - Accouplement - Correction Inverseur de MarcheDocument6 pagesTD2 - Accouplement - Correction Inverseur de MarcheAbdelkhalek SaidiPas encore d'évaluation
- CINEMATIQUEDocument8 pagesCINEMATIQUEKalina MaherisoaPas encore d'évaluation
- Sujet Et Corrige Et de Lexamen de Remplacement de Physique 1Document3 pagesSujet Et Corrige Et de Lexamen de Remplacement de Physique 1fallmaguette391100% (1)
- Boîte de Vitesses Manuelle 02T Et 002Document34 pagesBoîte de Vitesses Manuelle 02T Et 002António FernandesPas encore d'évaluation
- Presentation 04Document25 pagesPresentation 04Nicolas LetardPas encore d'évaluation
- MMC CH5Document6 pagesMMC CH5Tiry Moh100% (1)
- DS Trains Épi Config - 2021+corrigé-1Document3 pagesDS Trains Épi Config - 2021+corrigé-1Dan CheridanPas encore d'évaluation
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourPas encore d'évaluation
- 2M Trait PSPDocument6 pages2M Trait PSPfazfrito lacaviataPas encore d'évaluation
- Test Statique 2005-2006 - CorrectionDocument2 pagesTest Statique 2005-2006 - CorrectionAbdelali YacoubiPas encore d'évaluation
- 6488 Elements de Correction Optidriver 1Document12 pages6488 Elements de Correction Optidriver 1Bernard Mbotchack100% (1)
- Préparation Concours20 CinématiqueDocument7 pagesPréparation Concours20 CinématiqueAdam100% (1)
- 249-2 S-Direction Différentielle Tracteur Sur ChainesDocument23 pages249-2 S-Direction Différentielle Tracteur Sur ChainesAhmedmahPas encore d'évaluation
- BiomecaniqueDocument13 pagesBiomecaniqueRenaît Des cendresPas encore d'évaluation
- TP 6 Etude Reducteur Train EpicycloidalDocument12 pagesTP 6 Etude Reducteur Train EpicycloidalLAALAIFAICELPas encore d'évaluation
- Livre-RDM - ExtraDocument125 pagesLivre-RDM - ExtralimmoudPas encore d'évaluation
- Becchio & Mandrile 2010 (FR-ES)Document40 pagesBecchio & Mandrile 2010 (FR-ES)BecchioMandrilePas encore d'évaluation