Vous aimerez peut-être aussi
- Methode de RayleighDocument4 pagesMethode de RayleighFatima FatimaPas encore d'évaluation
- TD DDS 03 2020 SolutionDocument6 pagesTD DDS 03 2020 SolutionJohnny KozyPas encore d'évaluation
- Serie D'exercices N°2Document2 pagesSerie D'exercices N°2Deghboudj SamirPas encore d'évaluation
- Expose ChaoDocument2 pagesExpose ChaoJunior TsindaPas encore d'évaluation
- Examen de RattapageDocument5 pagesExamen de RattapageLøü LõüPas encore d'évaluation
- Modes de Vibration-Equations Du Mouvement: M Ecanique Analytique - TD 7 - Licence de Physique - ChimieDocument2 pagesModes de Vibration-Equations Du Mouvement: M Ecanique Analytique - TD 7 - Licence de Physique - ChimieLerrys ObiangPas encore d'évaluation
- TD N7Document10 pagesTD N7JesúsGambartePas encore d'évaluation
- EXERCICE 28.5-: ElectromagnetismeDocument3 pagesEXERCICE 28.5-: ElectromagnetismeFabricePas encore d'évaluation
- DDS Cours 12Document44 pagesDDS Cours 12Tamba WafaaPas encore d'évaluation
- Osc CouplesDocument13 pagesOsc CouplesIsmail LasriPas encore d'évaluation
- MVA013 Exos Equ Diff Matrices Corrige Cle092b96 PDFDocument4 pagesMVA013 Exos Equ Diff Matrices Corrige Cle092b96 PDFMalik MakPas encore d'évaluation
- 03-41 - Integration Exercices Corriges Niveau 1Document25 pages03-41 - Integration Exercices Corriges Niveau 1miguelrikoudomedjoPas encore d'évaluation
- DSFDocument3 pagesDSFOmar KhayyamPas encore d'évaluation
- Sol-Devoir 3Document2 pagesSol-Devoir 3Jï JîPas encore d'évaluation
- Correction Feuille Revision 2Document10 pagesCorrection Feuille Revision 2Mahamat AbdramanePas encore d'évaluation
- Td2 SLDocument7 pagesTd2 SLayoub akahPas encore d'évaluation
- Cour RDM21Document14 pagesCour RDM21laalai faicelPas encore d'évaluation
- TP 3 Physique 3Document9 pagesTP 3 Physique 3MarwaPas encore d'évaluation
- Enoncé Centrale 1 2011Document4 pagesEnoncé Centrale 1 2011Hennzau Code N PlayPas encore d'évaluation
- Rappel de Programmation Et SignalDocument2 pagesRappel de Programmation Et SignalAly GAMALEDDYNPas encore d'évaluation
- Exos 09 EDLDocument4 pagesExos 09 EDLRamanujan SrinivasaPas encore d'évaluation
- TP N°3: Oscillations D'un Systeme Couple A Deux Degres de LiberteDocument8 pagesTP N°3: Oscillations D'un Systeme Couple A Deux Degres de LiberteAzOu DzPas encore d'évaluation
- Serie D'exercices 1 CSMVDocument4 pagesSerie D'exercices 1 CSMVFadila FadiPas encore d'évaluation
- ZerazdfvqscvbfghDocument8 pagesZerazdfvqscvbfghAmon BerberovicPas encore d'évaluation
- M06 - 4ec NN PDFDocument4 pagesM06 - 4ec NN PDFAbdesselem BoulkrounePas encore d'évaluation
- Corrigé1-DEVOIR2-Analyse 6 12-05Document5 pagesCorrigé1-DEVOIR2-Analyse 6 12-05AYMANE JAMALPas encore d'évaluation
- 1-Examen D'analyse Numerique-Université D'aix Marseille 1Document3 pages1-Examen D'analyse Numerique-Université D'aix Marseille 1Moumene MezPas encore d'évaluation
- Deux Oscillateurs Couples PDFDocument3 pagesDeux Oscillateurs Couples PDFHazy UrcanPas encore d'évaluation
- td2 CorrectionDocument3 pagestd2 Correctionmehdi abdelhakPas encore d'évaluation
- COR21Document2 pagesCOR21essajdi assiaPas encore d'évaluation
- 167Document3 pages167koneabdoullah4Pas encore d'évaluation
- Analyse Vectorielle CorrigeeDocument14 pagesAnalyse Vectorielle Corrigeemoura dalabraPas encore d'évaluation
- Chapitre 4-OV-12-12-2018Document4 pagesChapitre 4-OV-12-12-2018Med GuessabPas encore d'évaluation
- MAT1A examenPS Janv2018Document2 pagesMAT1A examenPS Janv2018Ghada AmakranePas encore d'évaluation
- Sommes Produits TD5Document5 pagesSommes Produits TD5Marcus Black100% (1)
- 821 2020 03 25 SeanceDocument2 pages821 2020 03 25 SeanceYousra Alaoui SossePas encore d'évaluation
- TP4 Phy3Document8 pagesTP4 Phy3TIHAL Wassim AmdjedPas encore d'évaluation
- SNL Remplacement 2021Document1 pageSNL Remplacement 2021Lii LiiPas encore d'évaluation
- CNC2022 M2AlgDocument3 pagesCNC2022 M2AlgTaha El BakkaliPas encore d'évaluation
- Ana 2Document29 pagesAna 2KilgravePas encore d'évaluation
- Cour Oscillations Libres 2ddl 1Document5 pagesCour Oscillations Libres 2ddl 1Hazhaz MedhiPas encore d'évaluation
- Examen Analyse 3 & Corrigé - ENSHDocument9 pagesExamen Analyse 3 & Corrigé - ENSHAbdelaziz MezianPas encore d'évaluation
- Corrigé de La Série 3 D'analyse 1Document8 pagesCorrigé de La Série 3 D'analyse 1Dan sumailiPas encore d'évaluation
- Chapitre II - CADYDocument8 pagesChapitre II - CADYHassan TankoPas encore d'évaluation
- Near East University Department of Civil EngineeringDocument8 pagesNear East University Department of Civil Engineeringmerlin otemakumiPas encore d'évaluation
- Ex 1 DS2 Bac SC 2020 CorrectionDocument1 pageEx 1 DS2 Bac SC 2020 CorrectionkakiazertyPas encore d'évaluation
- Oscill MécaniquesDocument9 pagesOscill MécaniquesOuedraogo HarounaPas encore d'évaluation
- Ana 19Document19 pagesAna 19Smail RCAPas encore d'évaluation
- Partiel AmphiA 236 2023Document6 pagesPartiel AmphiA 236 2023Ibrahim CoulibalyPas encore d'évaluation
- DDSA Série4Document2 pagesDDSA Série4Anas DoukaniPas encore d'évaluation
- EqDocument19 pagesEqmbou chancellePas encore d'évaluation
- EMD Analyse2 Mai2009 Énoncé+CorrigéDocument7 pagesEMD Analyse2 Mai2009 Énoncé+CorrigéFabricePas encore d'évaluation
- 1-Corrigé D'examen D'analyse Numerique-Université D'aix Marseille 1Document4 pages1-Corrigé D'examen D'analyse Numerique-Université D'aix Marseille 1Metidja Bilal100% (1)
- PH5 (Oscillations Mécaniques Libres)Document13 pagesPH5 (Oscillations Mécaniques Libres)Seif Souid87% (30)
- Rev Tosel CorrectionDocument29 pagesRev Tosel CorrectionbhffuhPas encore d'évaluation
- Exo3 CODocument7 pagesExo3 COAurelien Yeremou100% (1)
- Corrige Exam L3 2022Document3 pagesCorrige Exam L3 2022Abde RazakPas encore d'évaluation
- Exam1Math1,22 23Document2 pagesExam1Math1,22 23nadinerjaibi15Pas encore d'évaluation
- TD 9Document2 pagesTD 9guettouanis91Pas encore d'évaluation
- Ofmp CoolDocument1 pageOfmp Coolalaa maroua semmarPas encore d'évaluation
- QuadripolesDocument2 pagesQuadripolesalaa maroua semmarPas encore d'évaluation
- Examen Corigé N°02Document19 pagesExamen Corigé N°02alaa maroua semmarPas encore d'évaluation
- Vibration N°3 Oscillations Forcées D'un Système Électrique SimpleDocument13 pagesVibration N°3 Oscillations Forcées D'un Système Électrique Simplealaa maroua semmarPas encore d'évaluation
- Chapitre 2 Resistance Elements MachineDocument4 pagesChapitre 2 Resistance Elements MachineImad BouhafsPas encore d'évaluation
- En 12350-4Document9 pagesEn 12350-4NDATAPas encore d'évaluation
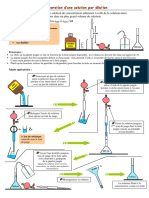
- Mode Op DilutionDocument1 pageMode Op DilutionValère Richu Fokou Tchemebe100% (1)
- État de L'art (Version Provisoire1)Document38 pagesÉtat de L'art (Version Provisoire1)lando de chancePas encore d'évaluation
- Chim311-2021-Mécanismes RéactionelsDocument51 pagesChim311-2021-Mécanismes RéactionelsKornichonPas encore d'évaluation
- Amedeo AvogadroDocument3 pagesAmedeo Avogadroاليزيد بن توهاميPas encore d'évaluation
- Série Hydrocarbures AliphatiquesDocument3 pagesSérie Hydrocarbures Aliphatiqueszeineb fadhelPas encore d'évaluation
- Produits Fabrication EcransDocument4 pagesProduits Fabrication EcransErnest KekeyiPas encore d'évaluation
- TP Miscibilite - ModifiéDocument2 pagesTP Miscibilite - ModifiéAntonin ClemenceauPas encore d'évaluation
- Chap 1 - Scan Des Exercices Du Livre Et CorrigésDocument5 pagesChap 1 - Scan Des Exercices Du Livre Et CorrigéscharbelPas encore d'évaluation
- TP Chimie OrganiqueDocument8 pagesTP Chimie OrganiqueSamar Zedam100% (1)
- Série. Les Lois de La Réaction ChimiqueDocument2 pagesSérie. Les Lois de La Réaction ChimiqueAyoub EchahelPas encore d'évaluation
- 201701271158125 (3)Document9 pages201701271158125 (3)Ali RammalPas encore d'évaluation
- BLPC 218 49-58Document12 pagesBLPC 218 49-58Kenza RhimiPas encore d'évaluation
- Analyse Du RisqueDocument5 pagesAnalyse Du RisqueAntonov 7Pas encore d'évaluation
- Controle 1S1Document2 pagesControle 1S1Moncef HadraouiPas encore d'évaluation
- Chapitre I. ExercicesDocument7 pagesChapitre I. ExercicesChris-Mousiz ProductionPas encore d'évaluation
- Devoir Synthèse-1 - 4 ScExp-2022Document6 pagesDevoir Synthèse-1 - 4 ScExp-2022Riadh BesbesPas encore d'évaluation
- Présentation MémoireDocument45 pagesPrésentation MémoireIl HamPas encore d'évaluation
- Potentiometre Brochure FRDocument18 pagesPotentiometre Brochure FREl Mehdi GhalabPas encore d'évaluation
- Proprietes ColligativesDocument46 pagesProprietes ColligativesSERIGNE MAYORO THIAMPas encore d'évaluation
- TH2011PEST1122 CompleteDocument226 pagesTH2011PEST1122 CompleteMami SamPas encore d'évaluation
- Rapport de SechageDocument14 pagesRapport de SechageELouitri ibtissamePas encore d'évaluation
- Travaux Dirigeees de Materiaux CompositesDocument2 pagesTravaux Dirigeees de Materiaux CompositesFrancis SonkengPas encore d'évaluation
- TDS FR Fiche Technique GRILLAGE DT GALFAN NF Juil15.compressedDocument2 pagesTDS FR Fiche Technique GRILLAGE DT GALFAN NF Juil15.compressedVi DTNPas encore d'évaluation
- Corrigé Exos V Et VI Série 1Document10 pagesCorrigé Exos V Et VI Série 1Soufiane Rouchad100% (1)
- Cours Chimie Organique 2 C245 BCG S4Document93 pagesCours Chimie Organique 2 C245 BCG S4elhafyanifatima20Pas encore d'évaluation
- Chapitre III Etude Des MétauxDocument11 pagesChapitre III Etude Des Métauxmadomano1971Pas encore d'évaluation
- Atomes Et Ions - 3 AC PDFDocument3 pagesAtomes Et Ions - 3 AC PDFaznag hicham100% (1)
- 16 - Determination-Des-Metaux-Lourds-Par-VoieDocument7 pages16 - Determination-Des-Metaux-Lourds-Par-VoieMaria MirceaPas encore d'évaluation