Vous aimerez peut-être aussi
- Précis de télédétection - Volume 3: Traitements numériques d'images de télédétectionD'EverandPrécis de télédétection - Volume 3: Traitements numériques d'images de télédétectionPas encore d'évaluation
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation
- Les Outils Du TopoDocument8 pagesLes Outils Du TopoÃh Mëd Hä MdįPas encore d'évaluation
- Expose de GPSDocument10 pagesExpose de GPSbilal SABOHPas encore d'évaluation
- Lever de DetailsDocument3 pagesLever de DetailsALON?TSIE TANEZOUA ISRAEL0% (2)
- Notion Élémentaire de TopographieDocument18 pagesNotion Élémentaire de TopographieFatima BouchfarPas encore d'évaluation
- TopoDocument11 pagesTopoAmir BeyPas encore d'évaluation
- Station TotalesDocument9 pagesStation TotalesMolnarAndreiPas encore d'évaluation
- Expo Station Totale SARA CDocument12 pagesExpo Station Totale SARA CByl KaPas encore d'évaluation
- Implantation Et TPDDocument5 pagesImplantation Et TPDghaiethPas encore d'évaluation
- Rapport-1 TP Dao2/Master-1: Republique Du Senegal Ministere de L'Enseignement Superieur Et de La RechercheDocument21 pagesRapport-1 TP Dao2/Master-1: Republique Du Senegal Ministere de L'Enseignement Superieur Et de La RechercheKouassiPas encore d'évaluation
- Levé À La PlanchetteDocument12 pagesLevé À La PlanchetteAmine KiratPas encore d'évaluation
- ThéodoliteDocument5 pagesThéodoliteIchiban Iji100% (1)
- Chapitre II VRDDocument24 pagesChapitre II VRDDominique KouekamPas encore d'évaluation
- Cours TopographieDocument104 pagesCours TopographieEZ-ZYANI IMANEPas encore d'évaluation
- Cours TopoDocument14 pagesCours TopoOusman LamPas encore d'évaluation
- Cours de Topo Generale Bac Pro 1 - 063349Document24 pagesCours de Topo Generale Bac Pro 1 - 063349ZABRE IdrissaPas encore d'évaluation
- TP Topo.1Document6 pagesTP Topo.1Chaimaa tiloutPas encore d'évaluation
- Chapitre 1Document15 pagesChapitre 1ƵĨŊĘ ĔƉƉĬŊĘPas encore d'évaluation
- FONDATIONS - Génie CivilDocument16 pagesFONDATIONS - Génie CivilLanciné Djene Kourouma100% (1)
- Surface Parcelle Et Point InaccessibleDocument2 pagesSurface Parcelle Et Point InaccessibleM'ed El'BkPas encore d'évaluation
- To Po e - Watermark PDFDocument102 pagesTo Po e - Watermark PDFkhezzane nadjoua100% (1)
- Instruments Topographiques 05Document7 pagesInstruments Topographiques 05hadjer amel DehiniPas encore d'évaluation
- 05 ImplantationDocument2 pages05 ImplantationIshak BaïchePas encore d'évaluation
- Topographie GeneralitesDocument7 pagesTopographie GeneralitesMoez AliPas encore d'évaluation
- TP Topographie Appliquée 01Document7 pagesTP Topographie Appliquée 01Blue DragonTVPas encore d'évaluation
- M07-Des Éléments de Base de Dessin de Bâtiment Et de Dessi BTP-TSGTDocument202 pagesM07-Des Éléments de Base de Dessin de Bâtiment Et de Dessi BTP-TSGTNaser HassanPas encore d'évaluation
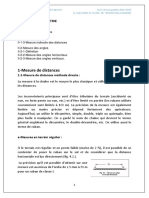
- 05 - Mesures Des DistancesDocument11 pages05 - Mesures Des DistancesMzoughi HaythemPas encore d'évaluation
- Topographie Mémoire Zinou DaassaDocument5 pagesTopographie Mémoire Zinou DaassaZinou HazardPas encore d'évaluation
- Verification TacheometreDocument4 pagesVerification TacheometreAyǿub ŁahmãdiPas encore d'évaluation
- Plan de CoursDocument16 pagesPlan de CourssimonPas encore d'évaluation
- Chap4 - NivellementDocument14 pagesChap4 - NivellementAYADI IMED100% (1)
- Topographie Bts 1 Et 2aDocument78 pagesTopographie Bts 1 Et 2aMG SERVICE BOUTIQUEPas encore d'évaluation
- Lever TopographiqueDocument2 pagesLever TopographiqueMagloire KajidPas encore d'évaluation
- Auscultation BarrageDocument14 pagesAuscultation BarrageyoumaPas encore d'évaluation
- 8-Memoir Final PDFDocument101 pages8-Memoir Final PDFmeghsel ahmedPas encore d'évaluation
- Chapitre 2 PlanimetrieDocument8 pagesChapitre 2 Planimetriechawkiabdellah bouzid100% (1)
- 5 Caractéristiques Géométriques Du SolDocument1 page5 Caractéristiques Géométriques Du SolAbdou Detroit100% (1)
- Xyz - 149 Xyz Addition 27 11 16Document3 pagesXyz - 149 Xyz Addition 27 11 16Mohamed GhribPas encore d'évaluation
- Cours - Matreriel Et Appareils Topographique - ZEGAIT 2Document8 pagesCours - Matreriel Et Appareils Topographique - ZEGAIT 2Azzedine GarahPas encore d'évaluation
- Fiche de Travaux Diriges Numero 2 Calculs Topometrique 2Document3 pagesFiche de Travaux Diriges Numero 2 Calculs Topometrique 2tiakoumouafo100% (1)
- TD Issab Urbanisme GTDocument2 pagesTD Issab Urbanisme GTALON?TSIE TANEZOUA ISRAELPas encore d'évaluation
- Topo-TP1 Mise en StationDocument3 pagesTopo-TP1 Mise en StationYoussefTrigui100% (1)
- Memoire Compaore MandelaDocument92 pagesMemoire Compaore MandelaDjainaPas encore d'évaluation
- m03 Topographie Élémentaire1Document8 pagesm03 Topographie Élémentaire1Patricia DiazPas encore d'évaluation
- Cours-Levé-Imp Chap1 ContinuitéDocument16 pagesCours-Levé-Imp Chap1 ContinuitéRafik SaadaPas encore d'évaluation
- AérotriangulationDocument13 pagesAérotriangulationAmeh KouadioPas encore d'évaluation
- Travaux Dirigés de Nivellement-G101Document4 pagesTravaux Dirigés de Nivellement-G101Dahhak YoussefPas encore d'évaluation
- NivellementDocument8 pagesNivellementAnonymous LNStoL34Pas encore d'évaluation
- TP 02TOPO BallaDocument11 pagesTP 02TOPO BallahaniislambenkhiPas encore d'évaluation
- Chapitre 4 - Mesures Angulaires PDFDocument6 pagesChapitre 4 - Mesures Angulaires PDFarlintenPas encore d'évaluation
- Le Plan Topographique Est LDocument7 pagesLe Plan Topographique Est Lrtd(rdtrPas encore d'évaluation
- TP de 79Document11 pagesTP de 79haniislambenkhiPas encore d'évaluation
- 10 Chapitre 06 Corrigé Selon Observations de L'encadreurDocument16 pages10 Chapitre 06 Corrigé Selon Observations de L'encadreurrtd(rdtrPas encore d'évaluation
- CHAPITRE7Document82 pagesCHAPITRE7Yao Albert KouakouPas encore d'évaluation
- Mesure Des DistancesDocument10 pagesMesure Des DistancesJérémie AVOCEGAMOUPas encore d'évaluation
- Communication OTCDocument26 pagesCommunication OTCHfd Nour100% (1)
- Topographie 2018-2Document45 pagesTopographie 2018-2boboyiPas encore d'évaluation
- Cours Route II - Docx Corrige-2Document55 pagesCours Route II - Docx Corrige-2joelinzia7Pas encore d'évaluation
- Établissement Des Canevas PlanimétriquesDocument7 pagesÉtablissement Des Canevas PlanimétriquesFiras HasniPas encore d'évaluation
- 9 PagenumberDocument11 pages9 PagenumberAdilson Jose Marito MaritoPas encore d'évaluation
- La Realisation D'un R Seau D'assainissementDocument7 pagesLa Realisation D'un R Seau D'assainissementAdilson Jose Marito MaritoPas encore d'évaluation
- Memoire de Master 2 Eme Annee Calcul EtDocument133 pagesMemoire de Master 2 Eme Annee Calcul EtAdilson Jose Marito MaritoPas encore d'évaluation
- Sommaire 32Document77 pagesSommaire 32Adilson Jose Marito MaritoPas encore d'évaluation
- 5MU1Document23 pages5MU1Adilson Jose Marito MaritoPas encore d'évaluation
- Le DessinateurDocument3 pagesLe DessinateurAdilson Jose Marito Marito100% (1)
- D'où Vient L'argent 2Document3 pagesD'où Vient L'argent 2Adilson Jose Marito MaritoPas encore d'évaluation
- Béton Bas CarboneDocument8 pagesBéton Bas CarboneAdilson Jose Marito MaritoPas encore d'évaluation
- Questions de CoursDocument4 pagesQuestions de CoursAdilson Jose Marito MaritoPas encore d'évaluation
- TP MecaniqDocument3 pagesTP MecaniqAdilson Jose Marito MaritoPas encore d'évaluation
- Introductions TBDocument17 pagesIntroductions TBAdilson Jose Marito MaritoPas encore d'évaluation
- Berlioux - Gilloux - Jacob - TenaciteDocument16 pagesBerlioux - Gilloux - Jacob - TenaciteAdilson Jose Marito MaritoPas encore d'évaluation
- HydrocarburesDocument5 pagesHydrocarburesAdilson Jose Marito MaritoPas encore d'évaluation
- Hydratation Du Ciment PortlandDocument5 pagesHydratation Du Ciment PortlandAdilson Jose Marito MaritoPas encore d'évaluation
- SommaireDocument22 pagesSommaireAdilson Jose Marito MaritoPas encore d'évaluation
- Colchicine Dans La Goutte Usage Et MésusageDocument6 pagesColchicine Dans La Goutte Usage Et MésusageAmine DounanePas encore d'évaluation
- Vedette Matiére RAMEAU CORRIGEDocument5 pagesVedette Matiére RAMEAU CORRIGEBob Cavallo HBPas encore d'évaluation
- Dosage de La Vitamine CDocument10 pagesDosage de La Vitamine CalexisbradPas encore d'évaluation
- Comprendre La SchizophrénieDocument25 pagesComprendre La SchizophrénieMontada DjazaironaPas encore d'évaluation
- TD ExternesDocument24 pagesTD ExternesDoria OuahraniPas encore d'évaluation
- TP Projet D'arch 2è CibDocument12 pagesTP Projet D'arch 2è CibAMALI BlaisePas encore d'évaluation
- Cours 21-26 (Unite 6 +7)Document54 pagesCours 21-26 (Unite 6 +7)Maria SimotaPas encore d'évaluation
- Coloration GramDocument6 pagesColoration GramFatmazohra RAHILPas encore d'évaluation
- RTEC Cassette - R410A - InverterDocument2 pagesRTEC Cassette - R410A - InverterMohamed KhaldiPas encore d'évaluation
- Programme AidesoignantfinalDocument63 pagesProgramme AidesoignantfinalAbdelghni LachhabPas encore d'évaluation
- Mesures Anthropométriques Pour L'évaluation de L'état Nutritionnel D'un Individu & La Situation Dans Une CommunautéDocument67 pagesMesures Anthropométriques Pour L'évaluation de L'état Nutritionnel D'un Individu & La Situation Dans Une CommunautéIbrahim HamadouPas encore d'évaluation
- 01-03 - Dec10 - Philippe Dozoul - AFNOR - FDX50-252 - Francais PDFDocument24 pages01-03 - Dec10 - Philippe Dozoul - AFNOR - FDX50-252 - Francais PDFNassima Bendjeddou100% (1)
- Les Biomarqueurs de L'infarctus Du Myocarde: ChapitreDocument8 pagesLes Biomarqueurs de L'infarctus Du Myocarde: ChapitreTarek SayhiPas encore d'évaluation
- 2015 04 17 - Business Plan 2015 2017 - FRDocument88 pages2015 04 17 - Business Plan 2015 2017 - FRfohi2009Pas encore d'évaluation
- AVENTURE DE L'ELECTRICITE - C'est Pas Sorcier Spécial Enseignant - Yoshi37Document2 pagesAVENTURE DE L'ELECTRICITE - C'est Pas Sorcier Spécial Enseignant - Yoshi37BarbaraPas encore d'évaluation
- Grille-Observation EgronDocument10 pagesGrille-Observation EgronSofia KHOUBBANEPas encore d'évaluation
- Protocole Reherche 15 Sept 2023Document78 pagesProtocole Reherche 15 Sept 2023Ali AIT-MOHANDPas encore d'évaluation
- MemoireDocument120 pagesMemoireabdelndam904Pas encore d'évaluation
- Abord Premier de L'artère Mésentérique Supérieure Au Cours de La Duodénopancréatectomie CéphaliqueDocument3 pagesAbord Premier de L'artère Mésentérique Supérieure Au Cours de La Duodénopancréatectomie CéphaliquefdroooPas encore d'évaluation
- Graniscel S55Document2 pagesGraniscel S55Aîda hajriPas encore d'évaluation
- FIT Manioc 2014Document2 pagesFIT Manioc 2014Williams Koffi100% (1)
- 14 Antalgiques PDFDocument50 pages14 Antalgiques PDFLonely SnailPas encore d'évaluation
- Chapitre - 1 PH201Document15 pagesChapitre - 1 PH201FanxyvPas encore d'évaluation
- Tchekhov Les Trois SoeursDocument28 pagesTchekhov Les Trois SoeursCristina MiaPas encore d'évaluation
- Get File PDFDocument28 pagesGet File PDFHichemPas encore d'évaluation
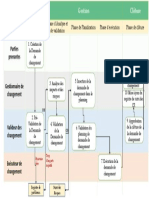
- 25 - Workflow Demande de ModificationDocument1 page25 - Workflow Demande de ModificationSerge VolpiPas encore d'évaluation
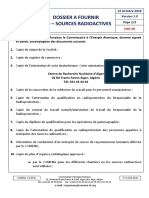
- CND SRDocument2 pagesCND SRFethi BELOUISPas encore d'évaluation
- Brochure Charte Audit Interne 2015def22x23def16pages Corrig2e 1Document16 pagesBrochure Charte Audit Interne 2015def22x23def16pages Corrig2e 1ʚïɞ Fi Fi ʚïɞPas encore d'évaluation
- TP Mineralogie PDFDocument40 pagesTP Mineralogie PDFMohamed Al100% (3)
- TD BetonDocument10 pagesTD BetonAggoun YounesPas encore d'évaluation