Vous aimerez peut-être aussi
- Diagnostic de Défauts Des Machines Électriques - 2Document76 pagesDiagnostic de Défauts Des Machines Électriques - 2hayet debbichPas encore d'évaluation
- TD N2 AutomatismeDocument4 pagesTD N2 AutomatismeYouness Bakache100% (4)
- DT - PalettiseurDocument5 pagesDT - PalettiseurMaghrebi YassinPas encore d'évaluation
- Pièces de RechangeDocument5 pagesPièces de RechangeBassirou Guero100% (3)
- Systeme de Conditionnement de Comprimes PharmaceutiquesDocument7 pagesSysteme de Conditionnement de Comprimes Pharmaceutiquessaber mecheri100% (3)
- TD AutomatismesDocument8 pagesTD AutomatismesFarah MelkiPas encore d'évaluation
- Renault Clio R3 CatalogueDocument135 pagesRenault Clio R3 CatalogueDavid Ureta100% (1)
- Rta Smart Roadster v2 Optimiz FRDocument197 pagesRta Smart Roadster v2 Optimiz FRkh662100% (1)
- IMotion 2201 FDocument175 pagesIMotion 2201 FGhjPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique Tri de Boitiers - Bac Technique (2014-2015) MR YagoubiDocument8 pagesDevoir de Synthèse N°1 - Génie Électrique Tri de Boitiers - Bac Technique (2014-2015) MR YagoubiFethi BenmassoudePas encore d'évaluation
- Système Automatique de Marquage de BoîtiersDocument6 pagesSystème Automatique de Marquage de BoîtiersNejib JallouliPas encore d'évaluation
- DS2.3 ST - DTDocument6 pagesDS2.3 ST - DTBouabdellaoui saif ennasrPas encore d'évaluation
- ADocument4 pagesAHichem HamdiPas encore d'évaluation
- Correctiontd1 Api21Document49 pagesCorrectiontd1 Api21Amira Jbeli100% (2)
- Grafcet4 AiguillageDocument7 pagesGrafcet4 Aiguillagegamerzxs681Pas encore d'évaluation
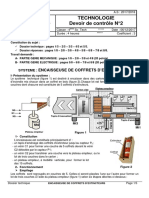
- Encaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeDocument4 pagesEncaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeTaieb BentaherPas encore d'évaluation
- TrdecaissDocument6 pagesTrdecaisselgabliPas encore d'évaluation
- Dev1 Shema TF3 S1 26102023Document3 pagesDev1 Shema TF3 S1 26102023Daouda OUEDRAOGOPas encore d'évaluation
- Devoir de Synthèse N°1 2006 2007 (Rhimi Jalel)Document4 pagesDevoir de Synthèse N°1 2006 2007 (Rhimi Jalel)Fathi MiralPas encore d'évaluation
- Transmissao Voith Retarder 115 EDocument4 pagesTransmissao Voith Retarder 115 EAbdelhak EzPas encore d'évaluation
- DS3 - Dossier Technique - 3STDocument6 pagesDS3 - Dossier Technique - 3STBouabdellaoui saif ennasrPas encore d'évaluation
- TD Auto 2 PDFDocument16 pagesTD Auto 2 PDFEdmond OuattaraPas encore d'évaluation
- Devoir de Contrôle N°2 2ème Semestre - Génie Mécanique Un Palettiseur - Bac Technique (2018-2019) MR Dhifaoui AbdelwahebDocument9 pagesDevoir de Contrôle N°2 2ème Semestre - Génie Mécanique Un Palettiseur - Bac Technique (2018-2019) MR Dhifaoui Abdelwahebabdelbasset110% (1)
- Devoir de Synthèse N°2 2019 2020 (MR Mustapha Ben Ammar)Document14 pagesDevoir de Synthèse N°2 2019 2020 (MR Mustapha Ben Ammar)Ghayth Bouzayani0% (1)
- Theme: Sirene Des Sapeurs Pompiers: Baccalaureat Serie F2 Duree 04 H DATE:07/12/2022Document2 pagesTheme: Sirene Des Sapeurs Pompiers: Baccalaureat Serie F2 Duree 04 H DATE:07/12/2022Mohamed AliPas encore d'évaluation
- Chap-10.EX02 SujDocument5 pagesChap-10.EX02 SujLouis PouchepadassPas encore d'évaluation
- TechnologieDocument9 pagesTechnologieمريم عبد الرحمانPas encore d'évaluation
- Poste Automatique de Peinture de Paraboles1Document5 pagesPoste Automatique de Peinture de Paraboles1Badreddine KraiemPas encore d'évaluation
- TP Auto PercageDocument21 pagesTP Auto PercagekaoutarPas encore d'évaluation
- DS1 2019-DTDocument5 pagesDS1 2019-DTMouad MemniPas encore d'évaluation
- Examen Blanc EstDocument3 pagesExamen Blanc EstAminou AbdoulayePas encore d'évaluation
- Organigramme Clé BureauDocument1 pageOrganigramme Clé Bureaumiva.p1004Pas encore d'évaluation
- Emd 2020 Api - F1Document2 pagesEmd 2020 Api - F1Ali CiaPas encore d'évaluation
- Stock Octobre 2022Document52 pagesStock Octobre 2022Anita Marie RamiandrisoaPas encore d'évaluation
- Dossier Technique Portes Automatiques ClasseDocument2 pagesDossier Technique Portes Automatiques Classemichelle212396Pas encore d'évaluation
- DC 142022Document19 pagesDC 142022ezzinePas encore d'évaluation
- Devoir 3 Si 2 Bac STM Tri de CaisseDocument11 pagesDevoir 3 Si 2 Bac STM Tri de CaisseHajar Ben GaraâPas encore d'évaluation
- Forod 2bac Si STM s1 3Document17 pagesForod 2bac Si STM s1 3Ben abd el jalil AyoubPas encore d'évaluation
- Devoir de Synthese N°3: Disciplines TechniquesDocument4 pagesDevoir de Synthese N°3: Disciplines TechniquesJUSDOVIC EDJOZOMBIPas encore d'évaluation
- DS11 2017 - 2018Document8 pagesDS11 2017 - 2018Ridha Manaa100% (1)
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Système de Conditionnement Des Boites - 3ème Technique (2013-2014) MR Ben Abdallah MarouanDocument14 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Système de Conditionnement Des Boites - 3ème Technique (2013-2014) MR Ben Abdallah MarouanMohamed SaifPas encore d'évaluation
- Encaisseuse de Coffrets D ExtincteursDocument9 pagesEncaisseuse de Coffrets D Extincteurstaiebshow100% (1)
- Tableaux High Torque Station - 20-07-23Document4 pagesTableaux High Torque Station - 20-07-23haithemlabidi4Pas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimPas encore d'évaluation
- TP6 Sy08Document8 pagesTP6 Sy08Alicia BoulléePas encore d'évaluation
- DT Copie1 4eme NRDocument6 pagesDT Copie1 4eme NRChokri Jaballi100% (1)
- DS1-DT-Carreaux CeramiquesDocument4 pagesDS1-DT-Carreaux CeramiquesMouad MemniPas encore d'évaluation
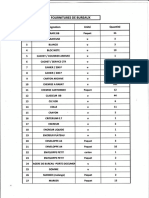
- Fournitures Bureaux: RecapDocument1 pageFournitures Bureaux: RecapBintou DiakitéPas encore d'évaluation
- Fournitures Bureaux: RecapDocument1 pageFournitures Bureaux: RecapBintou DiakitéPas encore d'évaluation
- Fournitures Bureaux: RecapDocument1 pageFournitures Bureaux: RecapBintou DiakitéPas encore d'évaluation
- Auto Tih Blanc2024Document12 pagesAuto Tih Blanc2024LoÏC MINTO'O100% (1)
- Problème 1Document8 pagesProblème 1rbakasse03Pas encore d'évaluation
- 029Document29 pages029Amara NejiPas encore d'évaluation
- Fiche D'inspectionDocument7 pagesFiche D'inspectionAtipoPas encore d'évaluation
- Exam API Seer-Gecsi 2020-2021Document4 pagesExam API Seer-Gecsi 2020-2021Safae AbdelmounimPas encore d'évaluation
- Grafcet-2 MeDocument36 pagesGrafcet-2 MeNabiha LabidiPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZDocument4 pagesDevoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZsuiton fzPas encore d'évaluation
- Auto Pih Blanc 2024'Document12 pagesAuto Pih Blanc 2024'LoÏC MINTO'OPas encore d'évaluation
- Presentation de Differents Cas de PlatelageDocument5 pagesPresentation de Differents Cas de PlatelagedesirePas encore d'évaluation
- Trie CaisseDocument3 pagesTrie Caissemahdibachta2Pas encore d'évaluation
- Malaxeur de Sable AutomatiseDocument9 pagesMalaxeur de Sable AutomatiseHamada HamadaPas encore d'évaluation
- Dossier-Technique DS3 2016&2017Document2 pagesDossier-Technique DS3 2016&2017Nejib JallouliPas encore d'évaluation
- Rapport de Stage: Salah Dine TALEB SIDI Matricule: 194015 MR Babe Mbareck DR Bebane Mohamed LemineDocument30 pagesRapport de Stage: Salah Dine TALEB SIDI Matricule: 194015 MR Babe Mbareck DR Bebane Mohamed LemineElbou MAHFOUDHPas encore d'évaluation
- Is1 FR FRDocument164 pagesIs1 FR FRAbdessalem JerbiPas encore d'évaluation
- Electromecanicien PDFDocument11 pagesElectromecanicien PDFMEKKAOUI ALAOUI YOUNESPas encore d'évaluation
- Leçon 1Document9 pagesLeçon 1Je suis Je suisPas encore d'évaluation
- Palans ElectriquesDocument20 pagesPalans ElectriquesHAFSA ZERHOUNIPas encore d'évaluation
- DESCRIPTIF DU MODULE - CPI25 - Construction Mecanique 2Document4 pagesDESCRIPTIF DU MODULE - CPI25 - Construction Mecanique 2Abdelmajid AittalebPas encore d'évaluation
- Alignement 6Document9 pagesAlignement 6r_racPas encore d'évaluation
- 2 Fabrication AdditiveDocument36 pages2 Fabrication AdditiveParc ElyesPas encore d'évaluation
- SMoteur LDocument132 pagesSMoteur LSara SwikiraPas encore d'évaluation
- ST Guidage RotationDocument2 pagesST Guidage RotationRouaissi Ridha100% (2)
- Aq151a, Aq151b, Aq151cDocument366 pagesAq151a, Aq151b, Aq151cxavier marsPas encore d'évaluation
- Pelles HydrauliquesDocument24 pagesPelles HydrauliquesSoumaïla NombréPas encore d'évaluation
- Roule MentsDocument63 pagesRoule MentsYassine ElbiadPas encore d'évaluation
- Corrigé DS Octobre 2017Document4 pagesCorrigé DS Octobre 2017yasahiro 10Pas encore d'évaluation
- Fi ChierDocument762 pagesFi ChierLéonel DOSSOUPas encore d'évaluation
- Couronne D'orientation, Roulement À Rouleaux Croisés, Sans DentureDocument2 pagesCouronne D'orientation, Roulement À Rouleaux Croisés, Sans DentureWalidPas encore d'évaluation
- Dr-Unite de Production Du TSPDocument4 pagesDr-Unite de Production Du TSPGharbi SaifiddinPas encore d'évaluation
- CH IV Paliers Coussinets Et RoulementsDocument14 pagesCH IV Paliers Coussinets Et RoulementsIbrahim HassinePas encore d'évaluation
- 2327 FRDocument67 pages2327 FRfatihamPas encore d'évaluation
- Rapoort de Stage BBDocument40 pagesRapoort de Stage BBSouiai Mohammed AnouerPas encore d'évaluation
- Cours Accouplements BonDocument8 pagesCours Accouplements BonNzaou LucreshPas encore d'évaluation
- Examen Lub 2020-21Document3 pagesExamen Lub 2020-21fefePas encore d'évaluation
- Bibliothèque Analyses Arrêts CIMAFDocument4 pagesBibliothèque Analyses Arrêts CIMAFjoseph eric helles hellesPas encore d'évaluation
- Exemples de Montage de Roulements PDFDocument4 pagesExemples de Montage de Roulements PDFramiresSPas encore d'évaluation