Vous aimerez peut-être aussi
- Bencheikh PDFDocument12 pagesBencheikh PDFMohamed JarazPas encore d'évaluation
- 43 BenmeddourDocument7 pages43 BenmeddourYassir NjPas encore d'évaluation
- Idée de Base de La Méthode Des Eléments FinisDocument18 pagesIdée de Base de La Méthode Des Eléments FinisHamdi NefetiPas encore d'évaluation
- Méthodes Globales1Document2 pagesMéthodes Globales1adam20141999Pas encore d'évaluation
- UEH1Document59 pagesUEH1Andelson PierrePas encore d'évaluation
- HistoriqueDocument2 pagesHistoriqueFabrice DjiagouaPas encore d'évaluation
- Modelisation D'un R+3 Sur Le Logiciel RobotDocument16 pagesModelisation D'un R+3 Sur Le Logiciel Robotdibyjunior0007Pas encore d'évaluation
- Etude Numérique Des Ouvrages en Sol Renforcé Par GéogrilleDocument8 pagesEtude Numérique Des Ouvrages en Sol Renforcé Par Géogrillealiabdallah55Pas encore d'évaluation
- Revue Geotechnique - Parois Clouées PDFDocument13 pagesRevue Geotechnique - Parois Clouées PDFgilbertnhatPas encore d'évaluation
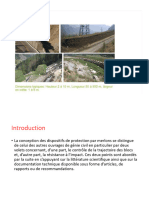
- MerlonDocument38 pagesMerlonimen kriaaPas encore d'évaluation
- Poinçonnement Des Dalles.10.11.08Document101 pagesPoinçonnement Des Dalles.10.11.08nicorr600100% (3)
- 693 700 Mollon VF2Document8 pages693 700 Mollon VF2cha ChaPas encore d'évaluation
- Ch5 - DAO - GC - Plan de Coffrage PDFDocument66 pagesCh5 - DAO - GC - Plan de Coffrage PDFHamza IguiPas encore d'évaluation
- Rapport PfeDocument79 pagesRapport Pfecivilnd100% (1)
- Version Finale RapportDocument81 pagesVersion Finale RapportKarim ArfaouiPas encore d'évaluation
- Chec RDM 2011Document9 pagesChec RDM 2011ATOPas encore d'évaluation
- Mur DuctileDocument38 pagesMur DuctileElias El HachemPas encore d'évaluation
- Bibliographie 2025Document3 pagesBibliographie 2025adam20141999Pas encore d'évaluation
- Performance-Based Approach in Seismic Design of Embedded Retaining WallsDocument4 pagesPerformance-Based Approach in Seismic Design of Embedded Retaining WallsBajocarPas encore d'évaluation
- Analyse de La Concentration de Contrainte Dans La Plaque Avec Trou Circulaire en Utilisant MATLA &.docx - CopieDocument11 pagesAnalyse de La Concentration de Contrainte Dans La Plaque Avec Trou Circulaire en Utilisant MATLA &.docx - CopieVital mihigo AganzePas encore d'évaluation
- Genie ParasismiqueDocument2 pagesGenie ParasismiqueKuchina SamaPas encore d'évaluation
- Couplage Mécano Fiabiliste en Vue D'une Évavaluation de La Performance Des BatimentsDocument6 pagesCouplage Mécano Fiabiliste en Vue D'une Évavaluation de La Performance Des BatimentsAdnane OURABAHPas encore d'évaluation
- Tal Et Sout Part IIIDocument18 pagesTal Et Sout Part IIIJwnwiw HebwoebPas encore d'évaluation
- Chapitre 2.objectifs de La Protection Parasismique Et Méthodes de DimensionnementDocument24 pagesChapitre 2.objectifs de La Protection Parasismique Et Méthodes de DimensionnementZaki Bouanane100% (1)
- Analyse Granulométrique2026Document3 pagesAnalyse Granulométrique2026adam20141999Pas encore d'évaluation
- Plan: Different Type de PlanchersDocument5 pagesPlan: Different Type de PlanchersHadi MoussaPas encore d'évaluation
- Soutenance 1 Er Année BrouillonDocument5 pagesSoutenance 1 Er Année BrouillonGhita NourPas encore d'évaluation
- StrucDocument10 pagesStrucChibba AliPas encore d'évaluation
- Rapport Ahmed Arrami Stage IngDocument41 pagesRapport Ahmed Arrami Stage IngTaysir AbidiPas encore d'évaluation
- Article CFM PDFDocument15 pagesArticle CFM PDFSadok KzadriPas encore d'évaluation
- Chapitre III Méthode Des Éléments Finis ÉtendueDocument29 pagesChapitre III Méthode Des Éléments Finis Étenduesalah mohammedPas encore d'évaluation
- Chapitre 4Document32 pagesChapitre 4yasmine daidasPas encore d'évaluation
- Ch5 - DAO - GC - Plan de CoffrageDocument65 pagesCh5 - DAO - GC - Plan de CoffrageNowe AhmadePas encore d'évaluation
- Some Problems of Application of The EuroDocument6 pagesSome Problems of Application of The EurobasssemPas encore d'évaluation
- Article 1Document16 pagesArticle 1COURS RDM 2017Pas encore d'évaluation
- Syllabus Dynamique Des Structures 2023-2024Document114 pagesSyllabus Dynamique Des Structures 2023-2024Guerrier ChelotPas encore d'évaluation
- Stabilisation Des Ouvrages MiniersDocument17 pagesStabilisation Des Ouvrages MiniersEmmanuel AssovounangPas encore d'évaluation
- Fond1Document12 pagesFond1Habib DridiPas encore d'évaluation
- Modélisation Du Fonctionnement Des Ouvrages en Béton Armé Sous SéismeDocument10 pagesModélisation Du Fonctionnement Des Ouvrages en Béton Armé Sous SéismeCivil AbdouPas encore d'évaluation
- Chouguermag GC PDFDocument172 pagesChouguermag GC PDFGigarostom AlgerPas encore d'évaluation
- Effect de La Corrélation Ente La Coéhsion Et L'angle de Frottement Sur La Capacité Portante D'une Semelle de FondationDocument9 pagesEffect de La Corrélation Ente La Coéhsion Et L'angle de Frottement Sur La Capacité Portante D'une Semelle de FondationmedmarPas encore d'évaluation
- COLONNES BALLASTEES-chapitre3-finalDocument68 pagesCOLONNES BALLASTEES-chapitre3-finalOthmane RihaniPas encore d'évaluation
- GCHYD MI GEO Norme GeotechniqueDocument7 pagesGCHYD MI GEO Norme GeotechniqueHafsi ToufikPas encore d'évaluation
- Idée de Base de La Méthode Des Eléments FinisDocument11 pagesIdée de Base de La Méthode Des Eléments FinisHamdi NefetiPas encore d'évaluation
- 10 Chap IIIDocument30 pages10 Chap IIISa MirabetPas encore d'évaluation
- Annales ITBTP N°149 - Contreventemetn Des Bâtiment - Albiges-Goulet 1960 PDFDocument28 pagesAnnales ITBTP N°149 - Contreventemetn Des Bâtiment - Albiges-Goulet 1960 PDFsautier_thomas75% (4)
- 0.32chapitre 1 Présentation Du ProjetDocument6 pages0.32chapitre 1 Présentation Du ProjetkhenguiPas encore d'évaluation
- Chapitre 4Document26 pagesChapitre 4قران الفجرPas encore d'évaluation
- Exemples D'applications de PNEUSOLDocument105 pagesExemples D'applications de PNEUSOLxmane111Pas encore d'évaluation
- ch05 Etude DynamiqueDocument22 pagesch05 Etude DynamiqueaekockautPas encore d'évaluation
- Chapitre1 (1) CherchourDocument16 pagesChapitre1 (1) CherchourAlem ChaoukiPas encore d'évaluation
- TP11Document7 pagesTP11YOUNES KABBAJPas encore d'évaluation
- Protocole Harrison KASSIN CorrigéDocument11 pagesProtocole Harrison KASSIN CorrigéJohnson noutchePas encore d'évaluation
- Géométrie computationnelle: Explorer les informations géométriques pour la vision par ordinateurD'EverandGéométrie computationnelle: Explorer les informations géométriques pour la vision par ordinateurPas encore d'évaluation
- Détection de collision: Comprendre les intersections visuelles en vision par ordinateurD'EverandDétection de collision: Comprendre les intersections visuelles en vision par ordinateurPas encore d'évaluation
- Génération de maillage: Avancées et applications dans la génération de maillage de vision par ordinateurD'EverandGénération de maillage: Avancées et applications dans la génération de maillage de vision par ordinateurPas encore d'évaluation
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Théorème de projection de Hilbert: Déverrouiller les dimensions dans la vision par ordinateurD'EverandThéorème de projection de Hilbert: Déverrouiller les dimensions dans la vision par ordinateurPas encore d'évaluation
- Moments de vitesse: Capturer la dynamique : aperçu de la vision par ordinateurD'EverandMoments de vitesse: Capturer la dynamique : aperçu de la vision par ordinateurPas encore d'évaluation
- Dessin technique: Libérer la perception visuelle dans le dessin techniqueD'EverandDessin technique: Libérer la perception visuelle dans le dessin techniquePas encore d'évaluation
- Données Projet PontDocument3 pagesDonnées Projet PontHassan AziziPas encore d'évaluation
- Charpente Métallique 4Document16 pagesCharpente Métallique 4Hassan AziziPas encore d'évaluation
- Cours - 2Ã Me Partie ITMDocument66 pagesCours - 2Ã Me Partie ITMHassan AziziPas encore d'évaluation
- Filtres CGCDocument7 pagesFiltres CGCHassan AziziPas encore d'évaluation
- Béton Précontraint - JarachiDocument118 pagesBéton Précontraint - JarachiHassan AziziPas encore d'évaluation
- Shéma de Présentation Lettres de MotivationDocument5 pagesShéma de Présentation Lettres de MotivationHassan AziziPas encore d'évaluation
- Support de Cours - Décision D'investissement 2A GCDocument75 pagesSupport de Cours - Décision D'investissement 2A GCHassan AziziPas encore d'évaluation
- Examen 2Document9 pagesExamen 2Hassan AziziPas encore d'évaluation
- Devoir LibreDocument4 pagesDevoir LibreHassan AziziPas encore d'évaluation
- TP-Project LibreDocument2 pagesTP-Project LibreHassan AziziPas encore d'évaluation
- TP D: La Masse Volumique: Fait ParDocument12 pagesTP D: La Masse Volumique: Fait ParHassan AziziPas encore d'évaluation
- Journal EMIsport NewsDocument5 pagesJournal EMIsport NewsHassan AziziPas encore d'évaluation
- Alphabet Phonétique International (API) : Quelques Remarques PréliminairesDocument4 pagesAlphabet Phonétique International (API) : Quelques Remarques PréliminairesCarina SolomonPas encore d'évaluation
- Chef de La Division OperationsDocument2 pagesChef de La Division OperationsJunior VoumaPas encore d'évaluation
- Notice Technique Travaux D Injection Des Anomalies Liees A La Dissolution Du Gypse Anteludien PDFDocument14 pagesNotice Technique Travaux D Injection Des Anomalies Liees A La Dissolution Du Gypse Anteludien PDFAbderrahmane El QouaisPas encore d'évaluation
- Cours 1 - Budget Des Actions Marketing Et CommercialesDocument29 pagesCours 1 - Budget Des Actions Marketing Et Commercialesjulien-34820Pas encore d'évaluation
- 01-Carlos CASTANEDA-VOIR (Les Enseignements D'un Sorcier Yaqui)Document296 pages01-Carlos CASTANEDA-VOIR (Les Enseignements D'un Sorcier Yaqui)khalil GibranPas encore d'évaluation
- Ms Hyd Dehbi PDFDocument195 pagesMs Hyd Dehbi PDFBenito BenitoPas encore d'évaluation
- Table Des Matières: Lycée Classique de Bafoussam 2015-2016 Travaux Dirigés de Mathématiques Première C/D 0.1 BarycentreDocument38 pagesTable Des Matières: Lycée Classique de Bafoussam 2015-2016 Travaux Dirigés de Mathématiques Première C/D 0.1 BarycentreEssohanam Awate100% (1)
- J Chapitre 1Document9 pagesJ Chapitre 1Ziad AouichatPas encore d'évaluation
- Bac Blanc 2023 2ème ExemplaireDocument3 pagesBac Blanc 2023 2ème ExemplaireHatim SebbahiPas encore d'évaluation
- Corrigé Seri3 CompteursDocument9 pagesCorrigé Seri3 CompteursRe Sab RinaPas encore d'évaluation
- 2Document26 pages2kodjoPas encore d'évaluation
- DellysDocument98 pagesDellysNari ManePas encore d'évaluation
- 2LP PV GlobalDocument4 pages2LP PV Globalbac 18Pas encore d'évaluation
- Elements Traces Metalliques - Liste Des Methodes Officielles v1Document1 pageElements Traces Metalliques - Liste Des Methodes Officielles v1KhalidOfqirPas encore d'évaluation
- Debattre en Classe EnseignantDocument8 pagesDebattre en Classe Enseignantkahina ghePas encore d'évaluation
- 2023 Sujet BacDocument3 pages2023 Sujet BacMa NouPas encore d'évaluation
- Résumé Des Notes de Cours CSTDocument56 pagesRésumé Des Notes de Cours CSTrubenbarth111Pas encore d'évaluation
- 2 Chapitre2 ComDocument4 pages2 Chapitre2 ComArwa TrabelsiPas encore d'évaluation
- Transfert Thermique 1Document34 pagesTransfert Thermique 1Chérif Dz0% (1)
- AutruiDocument4 pagesAutruiAristide Diallo100% (1)
- Guide Smiler Pour L - Elaboration de Systemes MealDocument46 pagesGuide Smiler Pour L - Elaboration de Systemes MealsamyPas encore d'évaluation
- Méthodologie de La Dissertation Philosophique TSTMGDocument2 pagesMéthodologie de La Dissertation Philosophique TSTMGruizPas encore d'évaluation
- 2021 Cahier de L'agriculture Aquaculture Enjeux Et PB de RechercheDocument11 pages2021 Cahier de L'agriculture Aquaculture Enjeux Et PB de Recherchesimon pierrePas encore d'évaluation
- تبيبي تيربو ماشين توربين ابيلتوDocument4 pagesتبيبي تيربو ماشين توربين ابيلتوYoucef BonyPas encore d'évaluation
- NF en 61511-3 - Systèmes Instrumentés de SécuritéDocument128 pagesNF en 61511-3 - Systèmes Instrumentés de SécuritéGRAYAAPas encore d'évaluation
- Cours Exponentielle ExercicesDocument2 pagesCours Exponentielle Exercicesoussama sadkiPas encore d'évaluation
- Cours Droits de LHommeDocument6 pagesCours Droits de LHommeLamouchi BayremPas encore d'évaluation
- Chapitre3 Algèbre de Bool Partie2Document27 pagesChapitre3 Algèbre de Bool Partie2Sou HìLaPas encore d'évaluation
- Catalogue de Prix Électricité Mise À Jour Le 21 01 2020Document5 pagesCatalogue de Prix Électricité Mise À Jour Le 21 01 2020Loth Tchuenkam TetoPas encore d'évaluation
- Enoncé TD 3 Coloration Des GraphesDocument6 pagesEnoncé TD 3 Coloration Des GraphesÑējmêddÿñ MæåtøugPas encore d'évaluation