Vous aimerez peut-être aussi
- Plan Stratégique Santé Communautaire Version Actualisée Nom Nouveau MSHPDocument93 pagesPlan Stratégique Santé Communautaire Version Actualisée Nom Nouveau MSHPRuben OpelyPas encore d'évaluation
- Exercices Corrigés Semi Conducteur PDFDocument5 pagesExercices Corrigés Semi Conducteur PDFETUSUP90% (21)
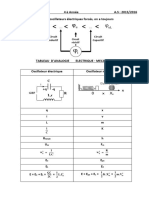
- Analogie Electrique - MecaniqueDocument2 pagesAnalogie Electrique - Mecaniqueben mamia100% (3)
- NOTEX GLASS C 100x100-40 AN PDFDocument1 pageNOTEX GLASS C 100x100-40 AN PDFraoufPas encore d'évaluation
- 10-Mecanique Chap10 OscillateursDocument17 pages10-Mecanique Chap10 OscillateursLuc AusterPas encore d'évaluation
- Chapitre 02Document10 pagesChapitre 02Mohammed ALMUSHIAAPas encore d'évaluation
- Resume Chapitre 8. Oscillateurs Harmoniques:) T Cos (X X (T) 2Document3 pagesResume Chapitre 8. Oscillateurs Harmoniques:) T Cos (X X (T) 2ahmedPas encore d'évaluation
- Résumés VOMDocument18 pagesRésumés VOMnohackplz90Pas encore d'évaluation
- Resumé Annexe OscillateurDocument3 pagesResumé Annexe OscillateurHajarPas encore d'évaluation
- Epreuve Finale MQ Avec Corrigé 2020Document2 pagesEpreuve Finale MQ Avec Corrigé 2020Youssra DjePas encore d'évaluation
- Ondes Chapitre 01Document11 pagesOndes Chapitre 01antoine moryPas encore d'évaluation
- Série 1Document6 pagesSérie 1salah eddine matiPas encore d'évaluation
- P PB02 40 CM PDFDocument11 pagesP PB02 40 CM PDFYoussef CoulibalyPas encore d'évaluation
- Résumé0 Ondes Et VibrationDocument8 pagesRésumé0 Ondes Et VibrationAbdou Hadj (AH)Pas encore d'évaluation
- 1-Modulations NumériquesDocument11 pages1-Modulations Numériquesmehdi seroutiPas encore d'évaluation
- Cours - EVOLUTION DE SYSTEMES ELECTRIQUES (Le Circuit LC Libre Et Non Amorti) - Bac Mathématiques (2011-2012) MR Saber Messaoudi PDFDocument1 pageCours - EVOLUTION DE SYSTEMES ELECTRIQUES (Le Circuit LC Libre Et Non Amorti) - Bac Mathématiques (2011-2012) MR Saber Messaoudi PDFMohamed HamdenePas encore d'évaluation
- Cours - EVOLUTION DE SYSTEMES ELECTRIQUES (Le Circuit LC Libre Et Non Amorti) PDFDocument1 pageCours - EVOLUTION DE SYSTEMES ELECTRIQUES (Le Circuit LC Libre Et Non Amorti) PDFKamel AouadiPas encore d'évaluation
- COURS 12.ppsxDocument29 pagesCOURS 12.ppsxﹻۣۗۗۗﹻۣۛﹻۣۗۗۗﹻﹻۣۗۗۗﹻ ألہجہٰٰﹻﹻﹻٰ۫ﹻﹻﹻ نہﹻﹻٰ۫ﹻﹻرﺄل ﹻۣۗۗۗﹻۣۛﹻۣۗۗۗﹻﹻۣۗۗۗﹻPas encore d'évaluation
- Gradateur MonoDocument9 pagesGradateur MonoOmar 95Pas encore d'évaluation
- SMP - S6 - PElectronique - Cours - TSDocument28 pagesSMP - S6 - PElectronique - Cours - TSimanemaster5Pas encore d'évaluation
- Test 2 Ovl Bon FichierDocument4 pagesTest 2 Ovl Bon Fichierboukredimidjamel1958Pas encore d'évaluation
- Chapitre 5Document2 pagesChapitre 5Toufik TrbPas encore d'évaluation
- Traitement de Signal 2Document18 pagesTraitement de Signal 2imanemaster5Pas encore d'évaluation
- Aspet Énergétiques Pour SC Physique Et SC Math (WWW - Pc1.ma)Document4 pagesAspet Énergétiques Pour SC Physique Et SC Math (WWW - Pc1.ma)HasnaPas encore d'évaluation
- 4 Cours Vibrations Chap 4 PDFDocument29 pages4 Cours Vibrations Chap 4 PDFMohamed Amira KhaledPas encore d'évaluation
- Serie 03 Oscillations ForcésDocument8 pagesSerie 03 Oscillations ForcésOmar LANGEURPas encore d'évaluation
- Représentation Fréquentielle Des SignauxDocument27 pagesReprésentation Fréquentielle Des Signauximanemaster5Pas encore d'évaluation
- Resume Oscillations Libres Dun Circuit RLCDocument1 pageResume Oscillations Libres Dun Circuit RLCsh ChaiPas encore d'évaluation
- BODEDocument7 pagesBODEAhmed AhmedPas encore d'évaluation
- Chapitre 3 Oscillations ForceesDocument5 pagesChapitre 3 Oscillations ForceesSinoise GoulorinPas encore d'évaluation
- TP Commande Des Systèmes Électro-ÉnergétiquesDocument8 pagesTP Commande Des Systèmes Électro-Énergétiquesbousbia laiche HacenePas encore d'évaluation
- Solution-TD1 Transfert de Chaleur PDFDocument5 pagesSolution-TD1 Transfert de Chaleur PDFĶhadija KhadijaPas encore d'évaluation
- Aspects Énergétiques Pour SC Vie Et Terre Fr-Prof - Sbiro (WWW - Pc1.ma)Document3 pagesAspects Énergétiques Pour SC Vie Et Terre Fr-Prof - Sbiro (WWW - Pc1.ma)medPas encore d'évaluation
- PH5 Oscillations Mécaniques LibresDocument17 pagesPH5 Oscillations Mécaniques LibresMouhamed Ali SahbaniPas encore d'évaluation
- Cadre - PC - SVT 10 Mai 2014 VFDocument3 pagesCadre - PC - SVT 10 Mai 2014 VFkhalid el yacoubiPas encore d'évaluation
- Chap 2 Convertisseurs Courant Alternatif Courant ContinuDocument16 pagesChap 2 Convertisseurs Courant Alternatif Courant ContinuKhettabPas encore d'évaluation
- Chapitre 4 Dynamique 2022-2023Document23 pagesChapitre 4 Dynamique 2022-2023OUMAIMA BAJOUPas encore d'évaluation
- Ph5 1RLC Amorti CoursDocument4 pagesPh5 1RLC Amorti CoursMayar BrickPas encore d'évaluation
- Poly Electricité 1 SMPC S2 Mai 2020Document45 pagesPoly Electricité 1 SMPC S2 Mai 2020Yassine EL FAKHAOUIPas encore d'évaluation
- EXERCICE 28.5-: ElectromagnetismeDocument3 pagesEXERCICE 28.5-: ElectromagnetismeFabricePas encore d'évaluation
- Chapitre 4-OV-12-12-2018Document4 pagesChapitre 4-OV-12-12-2018Med GuessabPas encore d'évaluation
- TD Regime TransitoireDocument4 pagesTD Regime Transitoirefsabdo7Pas encore d'évaluation
- EPL Physique 2009 CorrigeDocument6 pagesEPL Physique 2009 CorrigeYasseru YumiiPas encore d'évaluation
- Syntheses Janvier 2014Document9 pagesSyntheses Janvier 2014Achraf BejaouiPas encore d'évaluation
- td1 Modélisation-FréquentielleDocument2 pagestd1 Modélisation-FréquentielleBeyaz ÇiçekPas encore d'évaluation
- Induct AnceDocument2 pagesInduct AnceagabuskasepaPas encore d'évaluation
- TP Capteur Acceleration & DeplacementDocument9 pagesTP Capteur Acceleration & Deplacementcopch2020Pas encore d'évaluation
- Concours Commun Marocain Session: 1997 MP Et Tsi Epreuve de Physique II Durée: 4 HDocument3 pagesConcours Commun Marocain Session: 1997 MP Et Tsi Epreuve de Physique II Durée: 4 HZakariaPas encore d'évaluation
- Ch6Systèmedesecondordre EtudetemporelleDocument7 pagesCh6Systèmedesecondordre EtudetemporelleYVANPas encore d'évaluation
- Methode de RayleighDocument4 pagesMethode de RayleighFatima FatimaPas encore d'évaluation
- Solutions TD No.3 Exercice 1Document9 pagesSolutions TD No.3 Exercice 1pwremilyPas encore d'évaluation
- GE - 2019-2020 Ed-Dahhak Cours Electrotechnique - S2Document38 pagesGE - 2019-2020 Ed-Dahhak Cours Electrotechnique - S2Said ZahirPas encore d'évaluation
- Chapitre 05Document4 pagesChapitre 05Mohammed ALMUSHIAAPas encore d'évaluation
- 11 Exercice 11 COR NEWDocument5 pages11 Exercice 11 COR NEWOumayma RkiouakPas encore d'évaluation
- Chapitre 04Document9 pagesChapitre 04Mohammed ALMUSHIAAPas encore d'évaluation
- Conduction Avec Génération D'énergieDocument2 pagesConduction Avec Génération D'énergieḾăȓ ŸēmPas encore d'évaluation
- Cours 1ddl Libres Non AmortiesDocument6 pagesCours 1ddl Libres Non AmortiesRedouane RedaPas encore d'évaluation
- Exercice 1Document4 pagesExercice 1motmaniPas encore d'évaluation
- Chapitre 3-OV-28-11-2018Document6 pagesChapitre 3-OV-28-11-2018Med GuessabPas encore d'évaluation
- MAGNETISME II - CoursDocument14 pagesMAGNETISME II - CoursGhost Storm100% (1)
- TP Recap2 - Pointeurs Et FonctionsDocument7 pagesTP Recap2 - Pointeurs Et FonctionsMATH FOR EVERYONEPas encore d'évaluation
- ULAF+ UMN V33-1 FraDocument162 pagesULAF+ UMN V33-1 FraChoubane Lamine75% (4)
- Daw - TP1Document2 pagesDaw - TP1hamamaPas encore d'évaluation
- Mécanique TD1Document2 pagesMécanique TD1MajdolinePas encore d'évaluation
- Cours - Chapitre2 - Communication Et SIDocument20 pagesCours - Chapitre2 - Communication Et SIHadia LEMIAPas encore d'évaluation
- Semelle S2Document1 pageSemelle S2Ulrich GBENOUPas encore d'évaluation
- Exemple DDocument3 pagesExemple DAymen JokerPas encore d'évaluation
- LorentzDocument6 pagesLorentzMr. MyceiPas encore d'évaluation
- 4427 001-EbookDocument96 pages4427 001-EbookEmmanuel LAPEBIEPas encore d'évaluation
- Mise en PratiqueDocument2 pagesMise en PratiquePierre Frantz PetitPas encore d'évaluation
- Hydraulique AgricoleDocument151 pagesHydraulique AgricoleAyoub NaimPas encore d'évaluation
- Guide Pratique D'internet Pour Nouveaux InternautesDocument33 pagesGuide Pratique D'internet Pour Nouveaux InternautesMustapha FagrouchPas encore d'évaluation
- Cps 359Document167 pagesCps 359Antonin JoeyKanePas encore d'évaluation
- Chapitre 3 Partie 2 Midnight SunDocument15 pagesChapitre 3 Partie 2 Midnight SunOrlane JoveniauxPas encore d'évaluation
- APC ACTIVITE 2ndDocument2 pagesAPC ACTIVITE 2ndFrançois regis NikièmaPas encore d'évaluation
- Devoir de Synthèse N°1 1er Semestre - Sciences Physiques - Bac Sciences Exp (2018-2019) MR Foued Bahlous PDFDocument7 pagesDevoir de Synthèse N°1 1er Semestre - Sciences Physiques - Bac Sciences Exp (2018-2019) MR Foued Bahlous PDFMohamed SaidiPas encore d'évaluation
- Le Rotary Club de Rennes Reçoit Une Citation Du Président Du Rotary International Pour L'année 2010-2011Document3 pagesLe Rotary Club de Rennes Reçoit Une Citation Du Président Du Rotary International Pour L'année 2010-2011AnneArquePas encore d'évaluation
- 00pa Ep Voirie AepDocument28 pages00pa Ep Voirie AepMohamed KarimiPas encore d'évaluation
- Fra Mares Manu PuckproDocument16 pagesFra Mares Manu Puckprogateaulu270Pas encore d'évaluation
- NF en 13108-2Document28 pagesNF en 13108-2Mohamed HOUGGAALIPas encore d'évaluation
- Automates Programmables Industriels (A.P.I)Document26 pagesAutomates Programmables Industriels (A.P.I)Hayet BechedliPas encore d'évaluation
- Fondations Parasismiques - DpeaDocument12 pagesFondations Parasismiques - DpeaDonald AristorPas encore d'évaluation
- PHYSIOLOGIE Rein Nseka Modified FinalDocument46 pagesPHYSIOLOGIE Rein Nseka Modified FinalDominique Ilunga mbambiPas encore d'évaluation
- Check List Ipran Hard&SoftDocument31 pagesCheck List Ipran Hard&SoftHicham M-pirePas encore d'évaluation
- SEG S4 IG Chap 1 PDFDocument38 pagesSEG S4 IG Chap 1 PDFSoufiane RiyadPas encore d'évaluation
- Code Uic: Conception Des Traverses Monoblocs en BétonDocument31 pagesCode Uic: Conception Des Traverses Monoblocs en BétonAli BdaPas encore d'évaluation
- Moulage CalculDocument14 pagesMoulage CalculHajar ZarroukiPas encore d'évaluation
- Apprentissage Non SuperviséDocument57 pagesApprentissage Non SuperviséMarwen GuesmiPas encore d'évaluation