Vous aimerez peut-être aussi
- Homographie: Homographie : transformations en vision par ordinateurD'EverandHomographie: Homographie : transformations en vision par ordinateurPas encore d'évaluation
- TD 4Document3 pagesTD 4BoumedienBoukhroubaPas encore d'évaluation
- Livre PDFDocument3 pagesLivre PDFTabai Rafik MohamedPas encore d'évaluation
- j1 142 Extrait CNC 2009 AdapteDocument3 pagesj1 142 Extrait CNC 2009 Adaptenassrou-eddine belhaidPas encore d'évaluation
- Exer Chap1 AsservDocument6 pagesExer Chap1 AsservIbtissam Et-taoutiPas encore d'évaluation
- SUP TD SLCI MODocument2 pagesSUP TD SLCI MOAbd EssadekPas encore d'évaluation
- Chap-2.EX01 SujDocument2 pagesChap-2.EX01 SujLouis PouchepadassPas encore d'évaluation
- Regles Simplification Schemas Blocs2Document2 pagesRegles Simplification Schemas Blocs2Mohcine ElbrPas encore d'évaluation
- Regles Simplification Schemas Blocs2Document2 pagesRegles Simplification Schemas Blocs2ZakiTalhiPas encore d'évaluation
- Regles Simplification Schemas Blocs2 PDFDocument2 pagesRegles Simplification Schemas Blocs2 PDFMarie MimiiPas encore d'évaluation
- Master I: Équipement de L'habitat: Fiche de TD N°3Document4 pagesMaster I: Équipement de L'habitat: Fiche de TD N°3Meziane YkhlefPas encore d'évaluation
- Apsim 10 AsservissementDocument3 pagesApsim 10 Asservissementsalma ait aliPas encore d'évaluation
- Ch4 - FrequentielleDocument56 pagesCh4 - FrequentielleChayeb HamzaPas encore d'évaluation
- MMMMMMMDocument6 pagesMMMMMMMnarimPas encore d'évaluation
- Projet CM PortiquesDocument22 pagesProjet CM PortiquesAymen RahmouniPas encore d'évaluation
- Chap - 3 - Modélisation Du MCCDocument7 pagesChap - 3 - Modélisation Du MCCkhaled100% (1)
- TD AsservissementDocument11 pagesTD AsservissementAyoub ELJAFRYPas encore d'évaluation
- TD Train - D - Atterrissage - D - Helicoptere-ProfDocument5 pagesTD Train - D - Atterrissage - D - Helicoptere-ProfAbdelali YacoubiPas encore d'évaluation
- Ass Moto Reduct EurDocument2 pagesAss Moto Reduct EurCHATELAIN CHATELAINPas encore d'évaluation
- OoooooooooooooDocument4 pagesOooooooooooooonarimPas encore d'évaluation
- CI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument4 pagesCI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- Cours Bond Graph IIIFatima1Document79 pagesCours Bond Graph IIIFatima1ElnBEKKARYPas encore d'évaluation
- Chapitre III: Transmittance Ou Fonction de Transfert D'un Système LinéaireDocument4 pagesChapitre III: Transmittance Ou Fonction de Transfert D'un Système LinéaireBouzid Mohamed CherifPas encore d'évaluation
- Chapitre 2Document36 pagesChapitre 2sawsen10Pas encore d'évaluation
- C4-Chap2 - Manimulation Schémas BlocsDocument4 pagesC4-Chap2 - Manimulation Schémas Blocshamzasaad615Pas encore d'évaluation
- TD 6 (Ex Et Sol)Document9 pagesTD 6 (Ex Et Sol)anass sbniPas encore d'évaluation
- AL7MA20TEPA0111-Sequence-06 - Académie en LigneDocument36 pagesAL7MA20TEPA0111-Sequence-06 - Académie en LigneAnkenyPas encore d'évaluation
- Corrigé Page 19Document7 pagesCorrigé Page 19nesli hanePas encore d'évaluation
- Schemas FonctionnelsDocument6 pagesSchemas FonctionnelsWà Łîď Ký0% (1)
- Chapitre IV-Stabilité Et Précision Des Systèmes Linéaires Asservis Critère de Routh PDFDocument5 pagesChapitre IV-Stabilité Et Précision Des Systèmes Linéaires Asservis Critère de Routh PDFHouimli AbdlazizPas encore d'évaluation
- Cours SAMP 4 Superposition Dep-BlocDocument3 pagesCours SAMP 4 Superposition Dep-BlocOfficielAZNPas encore d'évaluation
- 3 - Fonction de Transfert Et Schéma FonctionnelDocument6 pages3 - Fonction de Transfert Et Schéma FonctionnelNEAR HAMZAPas encore d'évaluation
- Projet CM - Portiques - Partie 1Document11 pagesProjet CM - Portiques - Partie 1laura maidenPas encore d'évaluation
- Devoir de PSP #02: Ref Ref 3 1 2Document13 pagesDevoir de PSP #02: Ref Ref 3 1 2limmoudPas encore d'évaluation
- Chapitre 02Document9 pagesChapitre 02houda bensalahPas encore d'évaluation
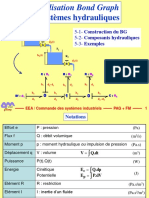
- 5-Systèmes Hydrauliques: Modélisation Bond GraphDocument15 pages5-Systèmes Hydrauliques: Modélisation Bond GraphmassinisssaPas encore d'évaluation
- Cours 4Document3 pagesCours 4Badri23 SahliPas encore d'évaluation
- SERIE1 Auto 1AGEDocument3 pagesSERIE1 Auto 1AGERanim JouiniPas encore d'évaluation
- Evacuateur de CruesDocument36 pagesEvacuateur de CruesAhmad Yassine Kouache0% (1)
- Chap 4Document7 pagesChap 4JASSERPas encore d'évaluation
- Chap6 Sof Stabilité ITDocument46 pagesChap6 Sof Stabilité ITAhmed Ben MakhloufPas encore d'évaluation
- Annale DS - Eltk2Document6 pagesAnnale DS - Eltk2Ha MzaPas encore d'évaluation
- TD1 ContinuDocument4 pagesTD1 Continudhaouadi hazemPas encore d'évaluation
- Exercice Hyperstatisme Et Modelisation C PDFDocument10 pagesExercice Hyperstatisme Et Modelisation C PDFAmine HousniPas encore d'évaluation
- Turbine KaplanDocument10 pagesTurbine KaplanCyril Thomas Ginglinger100% (2)
- CH IV Mouvement Brusquement VarieDocument17 pagesCH IV Mouvement Brusquement Variebahya zeroualiPas encore d'évaluation
- Introduction - Capsule 5 FinalDocument21 pagesIntroduction - Capsule 5 FinalaymanPas encore d'évaluation
- Résumé Asservissement v1Document14 pagesRésumé Asservissement v1yasser bhPas encore d'évaluation
- 5.2.2 N°2 CorrigéDocument6 pages5.2.2 N°2 CorrigéHo ZiiPas encore d'évaluation
- Vérification Du Théorème de BernoulliDocument14 pagesVérification Du Théorème de BernoulliAbbas Sabba71% (17)
- Corrigé TD1 TRSF de MVTDocument5 pagesCorrigé TD1 TRSF de MVTأشرف عبودPas encore d'évaluation
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Document2 pagesCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Otman OtoPas encore d'évaluation
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891 PDFDocument2 pagesCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891 PDFOtman OtoPas encore d'évaluation
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Document2 pagesCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Bouraoui Ben AyedPas encore d'évaluation
- TP (Electronique)Document16 pagesTP (Electronique)ZahirPas encore d'évaluation
- TP3 Perte de Charge LGMDocument11 pagesTP3 Perte de Charge LGMBoughrara anisPas encore d'évaluation
- Note Calcul RDCDocument13 pagesNote Calcul RDCAMEURPas encore d'évaluation
- 1-Principe, Structure, ConstructionDocument29 pages1-Principe, Structure, ConstructionghandijihanPas encore d'évaluation
- Centrale, 2011, MP, Math Ematiques 1Document9 pagesCentrale, 2011, MP, Math Ematiques 1Max tekouPas encore d'évaluation
- 06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Document1 page06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Ghilles PoloPas encore d'évaluation
- RadjaZahia ZoutatAziza SilakhelYaminaDocument78 pagesRadjaZahia ZoutatAziza SilakhelYaminaLamia BekehchiPas encore d'évaluation
- MedafDocument42 pagesMedafYesmine JasminePas encore d'évaluation
- Fiche JavascriptDocument5 pagesFiche JavascriptA'ch RéfPas encore d'évaluation
- TP6 Complx 2018-2019Document2 pagesTP6 Complx 2018-2019Hadjer KaddourPas encore d'évaluation
- Le But de Cette Épreuve Est de Déterminer Si Un Seul Feutre Effaceur Suffit Pour Effacer Le Contenu D'une Petite Cartouche D'encre BleueDocument4 pagesLe But de Cette Épreuve Est de Déterminer Si Un Seul Feutre Effaceur Suffit Pour Effacer Le Contenu D'une Petite Cartouche D'encre BleuePrescillia DieziaPas encore d'évaluation
- Commandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeDocument159 pagesCommandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeSofiane ZozoPas encore d'évaluation
- UntitledDocument3 pagesUntitledyeheph yehephPas encore d'évaluation
- TP Api IiDocument11 pagesTP Api IiAdem AounPas encore d'évaluation
- Ece 19 SVT 01 V1Document2 pagesEce 19 SVT 01 V1AlexPas encore d'évaluation
- Exercice 1Document2 pagesExercice 1Nour elhoudaPas encore d'évaluation
- Cours - Pic 16f628a PDFDocument11 pagesCours - Pic 16f628a PDFridofoxPas encore d'évaluation
- cryptographie ٠٩٤٠٤٦Document67 pagescryptographie ٠٩٤٠٤٦Amina BenhassinePas encore d'évaluation
- Brochure Tech 2017 Techn Info Tournai 24pDocument28 pagesBrochure Tech 2017 Techn Info Tournai 24pDayang DayangPas encore d'évaluation
- Tp1 BI-PythonDocument3 pagesTp1 BI-PythonHiba AmaraPas encore d'évaluation
- Cours Infographie 1Document129 pagesCours Infographie 1Saf BesPas encore d'évaluation
- Scomazzon Pasal SMZ926Document225 pagesScomazzon Pasal SMZ926hiriPas encore d'évaluation
- KD455.50 Préconisations Montage Démontage - FRDocument7 pagesKD455.50 Préconisations Montage Démontage - FReric pineauPas encore d'évaluation
- PP2 Cor MathDocument69 pagesPP2 Cor MathtotoPas encore d'évaluation
- Poinçonnement: LIM SovanvichetDocument13 pagesPoinçonnement: LIM SovanvichetPhal KhemraPas encore d'évaluation
- Hydrologie Statistique PDFDocument153 pagesHydrologie Statistique PDFAhlam RA100% (1)
- l3 tm1 Chapitre1 Lecon 01Document10 pagesl3 tm1 Chapitre1 Lecon 01Fatima LagnaouiPas encore d'évaluation
- Fopc 0720916e 4241Document4 pagesFopc 0720916e 4241Cyrielle DomguePas encore d'évaluation
- TP SemaphoresDocument2 pagesTP Semaphoresعضوش محمدPas encore d'évaluation
- Capteurs/actuateurs Auto PDFDocument23 pagesCapteurs/actuateurs Auto PDFyassine89% (9)
- Serie MichelsonDocument8 pagesSerie MichelsonMD HM BCPas encore d'évaluation
- Maths 4-TD2Document3 pagesMaths 4-TD2bmessaad1970Pas encore d'évaluation
- Concours General Mathematiques 2002 SujetDocument5 pagesConcours General Mathematiques 2002 SujetkkstanPas encore d'évaluation
- Ex Ef PotenceDocument10 pagesEx Ef PotenceChafik BouguezourPas encore d'évaluation