Vous aimerez peut-être aussi
- Qu'est Ce Qu'materiau CompositeDocument23 pagesQu'est Ce Qu'materiau CompositeDayang Dayang100% (1)
- TP Matériaux Composites PDFDocument18 pagesTP Matériaux Composites PDFAhmed MraniPas encore d'évaluation
- Support de Cours Sciences Des MateriauxDocument107 pagesSupport de Cours Sciences Des Materiauxfathallah karimPas encore d'évaluation
- Cours Matériaux CompositesDocument96 pagesCours Matériaux CompositesSAI Khalid HichamPas encore d'évaluation
- Comportement Mécanique Des Matériaux Composites Et Multi-MatériauxDocument16 pagesComportement Mécanique Des Matériaux Composites Et Multi-Matériauxahmed ghassoulPas encore d'évaluation
- Cour DMT M2 FMPDocument32 pagesCour DMT M2 FMPʚǐɞ Zõlã ʚǐɞPas encore d'évaluation
- Les Défauts GéométriquesDocument3 pagesLes Défauts GéométriquesginawPas encore d'évaluation
- Activité Composites FOAD 11septembre2023Document2 pagesActivité Composites FOAD 11septembre2023Moustapha Diagne100% (1)
- TD MPC Gmsi MrmiDocument4 pagesTD MPC Gmsi MrmiMohammed El azhariPas encore d'évaluation
- Belhenini Soufyane Cours Materiaux CompositesDocument86 pagesBelhenini Soufyane Cours Materiaux CompositesLéon PoatyPas encore d'évaluation
- MEMOIRE Zakaria Belabed PDFDocument80 pagesMEMOIRE Zakaria Belabed PDFMustafa Moussaoui100% (1)
- Mécanique Des Matériaux Composites J. Molimard, EMSE 2004Document59 pagesMécanique Des Matériaux Composites J. Molimard, EMSE 2004abdallah100% (1)
- Vinyl EsterDocument3 pagesVinyl EsteromarPas encore d'évaluation
- Polymère Et Composite Enoncé Des ApplicationsDocument7 pagesPolymère Et Composite Enoncé Des ApplicationsHB RIMPas encore d'évaluation
- Exposé-Fourche de VeloDocument35 pagesExposé-Fourche de VeloAsmae Asseraou0% (1)
- ElaborationDocument87 pagesElaborationhacenePas encore d'évaluation
- Rapport TP MettallurgieDocument13 pagesRapport TP MettallurgieIsmail SamouhPas encore d'évaluation
- Tribologie MasterDocument15 pagesTribologie MasterabderazakPas encore d'évaluation
- Cours Sciences Des Matériaux 2Document40 pagesCours Sciences Des Matériaux 2Laila AzzouziPas encore d'évaluation
- Chapitre 8 h2014 PDFDocument24 pagesChapitre 8 h2014 PDFSheikh Al-shoteriPas encore d'évaluation
- Controle GM + CorrectionDocument3 pagesControle GM + CorrectionInass Hadda100% (1)
- Cours Propietes Mécaniques Pour Chimie Des MatériauxDocument14 pagesCours Propietes Mécaniques Pour Chimie Des MatériauxIkhlas SsePas encore d'évaluation
- Transmission de Puissance Prof PDFDocument16 pagesTransmission de Puissance Prof PDFRuppy MIYOUNAPas encore d'évaluation
- Composites PDFDocument102 pagesComposites PDFMaria100% (2)
- Soudage Laser 1-Le Rayonnement Laser PDFDocument5 pagesSoudage Laser 1-Le Rayonnement Laser PDFSourour TrabelsiPas encore d'évaluation
- MATERIAUXDocument3 pagesMATERIAUXAchraf MoutaharPas encore d'évaluation
- Techniques Et Méthodes D'analyse Métallographique in SituDocument3 pagesTechniques Et Méthodes D'analyse Métallographique in Situmariam zouhairPas encore d'évaluation
- Cours de Choix Des MatériauxDocument21 pagesCours de Choix Des MatériauxEl Hadj Mor SeckPas encore d'évaluation
- MEC 200 - Cours 01 A2022 - 221101 - 115402Document32 pagesMEC 200 - Cours 01 A2022 - 221101 - 115402Alexandre MassicottePas encore d'évaluation
- TP1 AbaqusDocument8 pagesTP1 AbaqusAhmed RACHDIPas encore d'évaluation
- Série Des ExercicesDocument4 pagesSérie Des Exercicesأشرف عبودPas encore d'évaluation
- Chapitre 2 Procédés D'élaboration Des CompositesDocument6 pagesChapitre 2 Procédés D'élaboration Des Compositesayoub ayoubPas encore d'évaluation
- Modélisation 3D de La Prothèse Totale de Hanche (PTH) Cas de Couple de Frottement (Alumine/Alumine)Document5 pagesModélisation 3D de La Prothèse Totale de Hanche (PTH) Cas de Couple de Frottement (Alumine/Alumine)Meddour BelkacemPas encore d'évaluation
- Problème de Statique Linéaire 1D (Barre, Poutre) : Université de Jijel Module LSNM Dépt de Génie Mécanique Master 2 CMDocument1 pageProblème de Statique Linéaire 1D (Barre, Poutre) : Université de Jijel Module LSNM Dépt de Génie Mécanique Master 2 CMMohamed YagoubPas encore d'évaluation
- ENIT S7 Rapport Procedes de Mise en FormeDocument8 pagesENIT S7 Rapport Procedes de Mise en FormeYoussef RafikiPas encore d'évaluation
- Rapport Recuit Des AciersDocument38 pagesRapport Recuit Des AciersFahmi chhiebiPas encore d'évaluation
- Revêtements Par Projection ThermiqueDocument2 pagesRevêtements Par Projection ThermiqueOualid100% (2)
- Chap1 Generalites MateriauxDocument2 pagesChap1 Generalites MateriauxbessamPas encore d'évaluation
- Materiaux Pour L'energie PVDocument27 pagesMateriaux Pour L'energie PVIlham KuisPas encore d'évaluation
- Cours Matériaux N°1-Structure de La MatièreDocument24 pagesCours Matériaux N°1-Structure de La MatièreDamienPas encore d'évaluation
- TD Caracterisation 2008Document9 pagesTD Caracterisation 2008Amar AmôurPas encore d'évaluation
- ENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020Document8 pagesENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020NANA EmmanuelPas encore d'évaluation
- TRIBOLOGIEDocument11 pagesTRIBOLOGIEkhaled kamel BouabdallahPas encore d'évaluation
- Chapitre 2 Essais D'endurance: Cours de Fatigue Des MatériauxDocument5 pagesChapitre 2 Essais D'endurance: Cours de Fatigue Des MatériauxFrancis SonkengPas encore d'évaluation
- Cours RDM II (Plan)Document4 pagesCours RDM II (Plan)ALAKOUKOPas encore d'évaluation
- Formation Solidworks SimulationDocument10 pagesFormation Solidworks SimulationDan CheridanPas encore d'évaluation
- Sujet Examen-Module Materiaux Composites Licence3 GM s2 2017-2018Document2 pagesSujet Examen-Module Materiaux Composites Licence3 GM s2 2017-2018Nadir BachiriPas encore d'évaluation
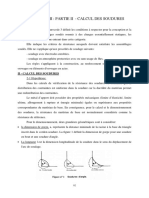
- Chapitre 8 Partie 2 - CALCUL DES SOUDURESDocument8 pagesChapitre 8 Partie 2 - CALCUL DES SOUDURESCara mellaPas encore d'évaluation
- Devoir de Synthèse N°1 - Physique التوتر الكهربائي - التكهرب - 9ème (2013-2014) Mr Hichem AmaraDocument3 pagesDevoir de Synthèse N°1 - Physique التوتر الكهربائي - التكهرب - 9ème (2013-2014) Mr Hichem Amarajifer100% (1)
- Cours de Mecanique Des Materiaux Composites Chap 3 Et4 Partie3-1Document25 pagesCours de Mecanique Des Materiaux Composites Chap 3 Et4 Partie3-1Francis SonkengPas encore d'évaluation
- Travaux Dirigeees de Materiaux CompositesDocument2 pagesTravaux Dirigeees de Materiaux CompositesFrancis SonkengPas encore d'évaluation
- Traitement de SurfaceDocument20 pagesTraitement de SurfaceMounia BELAIDPas encore d'évaluation
- Cours Science Des MateriauxDocument9 pagesCours Science Des MateriauxKamagatePas encore d'évaluation
- 522 Les Lois de DegradationsDocument10 pages522 Les Lois de DegradationseslochPas encore d'évaluation
- CoursDocument76 pagesCoursAnissa Haj AbdallahPas encore d'évaluation
- Matériaux Composites: PrésentationDocument1 pageMatériaux Composites: PrésentationBadrii LarrPas encore d'évaluation
- Lubrification TPDocument6 pagesLubrification TPInass HaddaPas encore d'évaluation
- LA311 Methodes NumeriquesDocument36 pagesLA311 Methodes NumeriquesYassine SanixPas encore d'évaluation
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Cmtd0 D0 D0 D0: Détermination de La Durée de Vie Et de La Vitesse de Coupe Économiques (TDocument6 pagesCmtd0 D0 D0 D0: Détermination de La Durée de Vie Et de La Vitesse de Coupe Économiques (TGhebouli SamirPas encore d'évaluation
- CHP 01 Généralités Sur Les Matériaux CompositesDocument6 pagesCHP 01 Généralités Sur Les Matériaux CompositesGhebouli SamirPas encore d'évaluation
- TD N°5 Avec Correction Métaux Et Alliage - 2021 VFDocument3 pagesTD N°5 Avec Correction Métaux Et Alliage - 2021 VFGhebouli Samir100% (1)
- TD N°2 Chapitre I Métaux Et Alliage - Corrigé 2020 2021Document6 pagesTD N°2 Chapitre I Métaux Et Alliage - Corrigé 2020 2021Ghebouli Samir50% (2)
- Etude Théorique Du Mode de Liaison Et de La Structure ÉlectrDocument54 pagesEtude Théorique Du Mode de Liaison Et de La Structure ÉlectrGhebouli SamirPas encore d'évaluation
- CHP 04 Critères de Rupture ClassiqueDocument6 pagesCHP 04 Critères de Rupture ClassiqueGhebouli SamirPas encore d'évaluation
- Intérrogation Corrigée N°1 Du 3 Mars 2021Document2 pagesIntérrogation Corrigée N°1 Du 3 Mars 2021Ghebouli SamirPas encore d'évaluation
- CHP 02 Spécificité Du Calcul Des Composites-ConvertiDocument9 pagesCHP 02 Spécificité Du Calcul Des Composites-ConvertiGhebouli SamirPas encore d'évaluation
- 1 Démonter Le Moteur: Démonter Le Moteur en Ordonnant Le Démontage Tel Que La Présente La Photo Ci-DessousDocument2 pages1 Démonter Le Moteur: Démonter Le Moteur en Ordonnant Le Démontage Tel Que La Présente La Photo Ci-DessousGhebouli SamirPas encore d'évaluation
- 2 Identifier Le Moteur Relever Les Caractéristiques Du Moteur Sur La Perceuse À Partir de La Plaque SignalétiqueDocument3 pages2 Identifier Le Moteur Relever Les Caractéristiques Du Moteur Sur La Perceuse À Partir de La Plaque SignalétiqueGhebouli SamirPas encore d'évaluation
- 1 Identifier La PerceuseDocument4 pages1 Identifier La PerceuseGhebouli SamirPas encore d'évaluation
- PWT Terminologie LiaisonsDocument14 pagesPWT Terminologie LiaisonsGhebouli SamirPas encore d'évaluation
- 7 Remonter Le MoteurDocument1 page7 Remonter Le MoteurGhebouli SamirPas encore d'évaluation
- 1 Préparer Le DémontageDocument3 pages1 Préparer Le DémontageGhebouli SamirPas encore d'évaluation
- Relative de Ces ContactDocument1 pageRelative de Ces ContactGhebouli SamirPas encore d'évaluation
- Technologie BEP MEI El-Eulma: Riques / Hélicoïdales / ConiquesDocument4 pagesTechnologie BEP MEI El-Eulma: Riques / Hélicoïdales / ConiquesGhebouli SamirPas encore d'évaluation
- 003Document2 pages003Ghebouli SamirPas encore d'évaluation
- II-3 Degrés de LibertéDocument2 pagesII-3 Degrés de LibertéGhebouli SamirPas encore d'évaluation
- Riques / Hélicoïdales / Coniques.: II-3 Degrés de LibertéDocument3 pagesRiques / Hélicoïdales / Coniques.: II-3 Degrés de LibertéGhebouli SamirPas encore d'évaluation
- Relative de Ces ContactDocument1 pageRelative de Ces ContactGhebouli SamirPas encore d'évaluation
- Technologie BEP MEI El-Eulma: 1.1 DéfinitionDocument10 pagesTechnologie BEP MEI El-Eulma: 1.1 DéfinitionGhebouli SamirPas encore d'évaluation
- Technologie BEP MEI El-Eulma: Riques / Hélicoïdales / ConiquesDocument2 pagesTechnologie BEP MEI El-Eulma: Riques / Hélicoïdales / ConiquesGhebouli SamirPas encore d'évaluation
- Technologie BEP MEI El-Eulma: 1.6 FAST (Functional Analysis System Technique)Document7 pagesTechnologie BEP MEI El-Eulma: 1.6 FAST (Functional Analysis System Technique)Ghebouli SamirPas encore d'évaluation
- Technologie BEP MEI El-Eulma: 1.6 FAST (Functional Analysis System Technique)Document8 pagesTechnologie BEP MEI El-Eulma: 1.6 FAST (Functional Analysis System Technique)Ghebouli SamirPas encore d'évaluation
- Dimensions Caractéristiques Nom Symbole: C.i.6: Analyse D'un Élément Les Surfaces Et Volumes ÉlémentairesDocument1 pageDimensions Caractéristiques Nom Symbole: C.i.6: Analyse D'un Élément Les Surfaces Et Volumes ÉlémentairesGhebouli SamirPas encore d'évaluation
- Technologie BEP MEI El-Eulma: 1.5 Actigramme SADT (Structured Analysis and Design Technic)Document8 pagesTechnologie BEP MEI El-Eulma: 1.5 Actigramme SADT (Structured Analysis and Design Technic)Ghebouli SamirPas encore d'évaluation
- Technologie BEP MEI El-Eulma: 1.5 Actigramme SADT (Structured Analysis and Design Technic)Document8 pagesTechnologie BEP MEI El-Eulma: 1.5 Actigramme SADT (Structured Analysis and Design Technic)Ghebouli SamirPas encore d'évaluation
- Echelle 1:3 Date: - . - . - . - . - Rep NB Désignation ObservationsDocument2 pagesEchelle 1:3 Date: - . - . - . - . - Rep NB Désignation ObservationsGhebouli SamirPas encore d'évaluation
- Echelle 1:3 Date: - . - . - . - . - Rep NB Désignation ObservationsDocument2 pagesEchelle 1:3 Date: - . - . - . - . - Rep NB Désignation ObservationsGhebouli SamirPas encore d'évaluation
- FIC Che M16: Problèm Mes de Te Mps Et de e Vitesse Débit: V Si La DisDocument11 pagesFIC Che M16: Problèm Mes de Te Mps Et de e Vitesse Débit: V Si La DisOlivier GOURDINPas encore d'évaluation
- Devoir 1 CorrigéDocument7 pagesDevoir 1 Corrigésamisamata7Pas encore d'évaluation
- Aveline V., Démonstration CP, CT Et Limite de BetzDocument3 pagesAveline V., Démonstration CP, CT Et Limite de BetzMax pnlPas encore d'évaluation
- 2021 Fui-Ff S1 Sujet Ecrit de PhysiqueDocument9 pages2021 Fui-Ff S1 Sujet Ecrit de PhysiqueTricePas encore d'évaluation
- Les Risques Électriques Dangers Et ProtectionDocument19 pagesLes Risques Électriques Dangers Et ProtectionattoumiiPas encore d'évaluation
- 20 Integ T2Document7 pages20 Integ T2Harry Posteur2Pas encore d'évaluation
- Résumé Avec Exercices - Robotique Industrielle 2021-Partie 01Document5 pagesRésumé Avec Exercices - Robotique Industrielle 2021-Partie 01FAWZI RONALDOPas encore d'évaluation
- Boucetta Geo DiffDocument60 pagesBoucetta Geo DiffYOUSSEF AIT TIZIPas encore d'évaluation
- Régression MutilinéaireDocument16 pagesRégression MutilinéaireLebossePas encore d'évaluation
- Étude D'un Bâtiment (R+5) À Usage D'habitation MixteDocument184 pagesÉtude D'un Bâtiment (R+5) À Usage D'habitation MixteSamir MerzoukPas encore d'évaluation
- Homothies ch.13Document5 pagesHomothies ch.13Abdelkader ZakariyaPas encore d'évaluation
- Master A Cade Mi Que Electro Me Can I QueDocument77 pagesMaster A Cade Mi Que Electro Me Can I QueJason BonePas encore d'évaluation
- Electricité Cours I1Document38 pagesElectricité Cours I1TrhaxPas encore d'évaluation
- Dérivée N-Ieme de (X - 1) N, Exercice de Analyse - 407309Document4 pagesDérivée N-Ieme de (X - 1) N, Exercice de Analyse - 407309agbotofiogodsonPas encore d'évaluation
- 03 Cin 04 ChainesFermees Applications 01 CorrDocument7 pages03 Cin 04 ChainesFermees Applications 01 CorrMouhcine Ben MoussaPas encore d'évaluation
- La Droite Dans Le Plan Exercices Non Corriges 8Document1 pageLa Droite Dans Le Plan Exercices Non Corriges 8saidbrownPas encore d'évaluation
- PREPA ATS 20xx Fiche Dynamique Des FluidesDocument1 pagePREPA ATS 20xx Fiche Dynamique Des FluidesAymerick MONINPas encore d'évaluation
- Bac ResumeDocument1 pageBac Resumeomar50% (2)
- Rapport AyemDocument38 pagesRapport Ayememmanuel nkemyPas encore d'évaluation
- Examen 1 Physique Nucléaire 2023-2024Document1 pageExamen 1 Physique Nucléaire 2023-2024ezzahidysaid91Pas encore d'évaluation
- BilamDocument14 pagesBilamKhene Mohamed LaminePas encore d'évaluation
- Note de Calcul Vitrage R03Document4 pagesNote de Calcul Vitrage R03Oussama EzzitouniPas encore d'évaluation
- CrocMath3 Chap4 WatermarkDocument30 pagesCrocMath3 Chap4 WatermarkitsamePas encore d'évaluation
- Modelisation Et Regulation Du Pendule InverseDocument1 pageModelisation Et Regulation Du Pendule Inverseنجيب حماموشPas encore d'évaluation
- Rayonnement IonisantDocument77 pagesRayonnement IonisantRojimilaPas encore d'évaluation
- !!!!ms - Gc. Mahi+Bouali PDFDocument98 pages!!!!ms - Gc. Mahi+Bouali PDFZouhirPas encore d'évaluation
- Rapport Zack AntonDocument28 pagesRapport Zack AntonImran Khan NiaziPas encore d'évaluation
- Les Types Des TurbinesDocument18 pagesLes Types Des TurbinesIssam Ennabih100% (2)
- Exercice AdDocument4 pagesExercice AdRamzi Ramzi100% (1)
- Panel Luxram 48w 4000k - 300x1200 2003062Document3 pagesPanel Luxram 48w 4000k - 300x1200 2003062GUEZEI HAROUNPas encore d'évaluation