Vous aimerez peut-être aussi
- Liaisons Equivalentes-2Document5 pagesLiaisons Equivalentes-2Mahrez ZaafouriPas encore d'évaluation
- TableauLiaisons ElevesDocument1 pageTableauLiaisons ElevesFlomPas encore d'évaluation
- Liaisons Equivalente-4sDocument3 pagesLiaisons Equivalente-4sMahrez ZaafouriPas encore d'évaluation
- MEC1 - Liaisons IMp PDFDocument4 pagesMEC1 - Liaisons IMp PDFAbdelmajid AittalebPas encore d'évaluation
- PDFDocument6 pagesPDFChokri AtefPas encore d'évaluation
- TP 01 Avec Annexe PDFDocument11 pagesTP 01 Avec Annexe PDFLaila RabhiPas encore d'évaluation
- TD #10 - Correction-Principe Fondamental de La StatiqueDocument9 pagesTD #10 - Correction-Principe Fondamental de La StatiqueSohayla ElkarsPas encore d'évaluation
- Chapitre IIIDocument15 pagesChapitre IIIMamadou BambaPas encore d'évaluation
- Cours 1Document9 pagesCours 1Qwerty YtrewqPas encore d'évaluation
- Cours Transformation Du Mouvement A Rapport FixeDocument10 pagesCours Transformation Du Mouvement A Rapport Fixewadie marzoukiPas encore d'évaluation
- Energétique Du Point Matériel en Référentiel GaliléenDocument11 pagesEnergétique Du Point Matériel en Référentiel GaliléenAbdellatif Abdo100% (1)
- Généralités en ChimieDocument6 pagesGénéralités en ChimieFatima Zahrae BhnPas encore d'évaluation
- SN°4 MFluidesDocument7 pagesSN°4 MFluidesrachida lakaazPas encore d'évaluation
- TD - Dynamique Des Solides Indc3a9formables 1Document6 pagesTD - Dynamique Des Solides Indc3a9formables 1YACOUBA BIYRNPas encore d'évaluation
- UEF611 Chapitre 3 Analyse Dans Lespace Détat Des Systèmes 2020Document29 pagesUEF611 Chapitre 3 Analyse Dans Lespace Détat Des Systèmes 2020Arrow ArrowPas encore d'évaluation
- CH2Document4 pagesCH2drissboum1bacPas encore d'évaluation
- 2016 021 PC Mat2Document1 page2016 021 PC Mat2bessisnathanePas encore d'évaluation
- CR TP RH BHLDocument19 pagesCR TP RH BHLCamelia BensmaiaPas encore d'évaluation
- Baba 113Document4 pagesBaba 113Babacar DiawPas encore d'évaluation
- Conductuion Electrique Dans Les SolidesDocument32 pagesConductuion Electrique Dans Les SolidesCHAIMA DEHBIPas encore d'évaluation
- កំណែរ វិញ្ញាសាប្រឡងបញ្ចប់ឆមាសទី១មេកានិច២Document9 pagesកំណែរ វិញ្ញាសាប្រឡងបញ្ចប់ឆមាសទី១មេកានិច២Dim Lify100% (2)
- Corrigé TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument9 pagesCorrigé TD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- Examen Et Correction Math 1Document8 pagesExamen Et Correction Math 1Abdelmouhaimen RedjaimiaPas encore d'évaluation
- DS de Thermodynamique Du 29 Avril 2017+corrigéDocument10 pagesDS de Thermodynamique Du 29 Avril 2017+corrigéwafaPas encore d'évaluation
- CHAP3-Changement de RéférentielDocument39 pagesCHAP3-Changement de RéférentielHarouna PanandtigriPas encore d'évaluation
- Td3 1 Principe Fondamental de La Statique en Chaine Ouverte Robot Ericc3Document3 pagesTd3 1 Principe Fondamental de La Statique en Chaine Ouverte Robot Ericc3ayoubamine191200617Pas encore d'évaluation
- Solution de La 5 Eme SerieDocument6 pagesSolution de La 5 Eme SerieSirinaPas encore d'évaluation
- Série de TD #01Document5 pagesSérie de TD #01Aruto YvannPas encore d'évaluation
- TD7 PDFDocument5 pagesTD7 PDFNarjiss ShimiPas encore d'évaluation
- Semaine 8Document8 pagesSemaine 8Kpabou KpabouPas encore d'évaluation
- Moment CinétiqueDocument16 pagesMoment CinétiqueDora BoraPas encore d'évaluation
- TDDerivabilite CorrigeDocument21 pagesTDDerivabilite Corrigejamal zahirPas encore d'évaluation
- Chap 1 Changement de RéférentielDocument18 pagesChap 1 Changement de RéférentielDavid Konan100% (1)
- 4 - Stabilité Des SystèmesDocument11 pages4 - Stabilité Des SystèmesLaurenne YaoPas encore d'évaluation
- TD Turbomachine CorrectionDocument9 pagesTD Turbomachine CorrectionRiadh BelmiloudPas encore d'évaluation
- Chapitre 3 - Changement de RéférentielDocument10 pagesChapitre 3 - Changement de RéférentielHamza BoutlihPas encore d'évaluation
- Chapitre 2 Cinematique Des SolidesDocument40 pagesChapitre 2 Cinematique Des SolidesOthniel Meignan100% (2)
- Equilibre D'un Système ChimiqueDocument8 pagesEquilibre D'un Système ChimiqueNouhad KaisPas encore d'évaluation
- Formule de WillisDocument1 pageFormule de WillisJean KouassiPas encore d'évaluation
- Chapitre 2Document8 pagesChapitre 2rami elloniPas encore d'évaluation
- Cours de Thermodynamique ChimiqueDocument40 pagesCours de Thermodynamique ChimiqueBadra Ali SanogoPas encore d'évaluation
- TD2 Meca AnalytiqueDocument8 pagesTD2 Meca Analytiquekhadija.benomar.58Pas encore d'évaluation
- Colle - 3 - SujetDocument4 pagesColle - 3 - SujetMarieme BoutraihPas encore d'évaluation
- Résumé CinétiqueDocument11 pagesRésumé CinétiqueAB lifestylePas encore d'évaluation
- TP Électricité - Filtres ActifsDocument23 pagesTP Électricité - Filtres ActifsJoaquin Cornejo96% (24)
- Chap. I - Flex Plane-Rap. - Copie - CopieDocument22 pagesChap. I - Flex Plane-Rap. - Copie - CopiemahdiPas encore d'évaluation
- 00 2023 TD Révisions PTSI PT CorDocument9 pages00 2023 TD Révisions PTSI PT CorimadbourzamPas encore d'évaluation
- 4.1correction - Sã© Rie - 6 - Cinã© Matique Du SolideDocument10 pages4.1correction - Sã© Rie - 6 - Cinã© Matique Du SolideHossam NajibPas encore d'évaluation
- TD Propagation Guidée CorrectionDocument6 pagesTD Propagation Guidée Correctionsoumaya bsdPas encore d'évaluation
- S2 - Chapitre 1 - Section 1Document37 pagesS2 - Chapitre 1 - Section 1leilarabhi16Pas encore d'évaluation
- Mouvement Harmonique Simple+Document4 pagesMouvement Harmonique Simple+Mohamed Amine BelkemitiPas encore d'évaluation
- TD8 - CorrectionDocument14 pagesTD8 - CorrectionMed FilaliPas encore d'évaluation
- Correction Du Problème 2 (Extrait de L'examen 2018/201) : R H. Ait RimouchDocument7 pagesCorrection Du Problème 2 (Extrait de L'examen 2018/201) : R H. Ait Rimouchyoussefbenguenny4Pas encore d'évaluation
- Chapitre 3 Cinematique Des Fluides-1-28Document28 pagesChapitre 3 Cinematique Des Fluides-1-28najatelgumaiche02Pas encore d'évaluation
- DS 2017 - Corrigé PDFDocument3 pagesDS 2017 - Corrigé PDFBOU100% (2)
- Serie de FourierDocument6 pagesSerie de FourierBrahamChaoucheFethallahYacine100% (2)
- Présentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesDocument1 pagePrésentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesMahrez ZaafouriPas encore d'évaluation
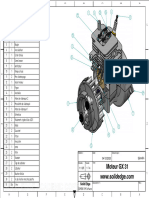
- Moteur GX 31: Solid EdgeDocument1 pageMoteur GX 31: Solid EdgeMahrez ZaafouriPas encore d'évaluation
- D-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionDocument1 pageD-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionMahrez ZaafouriPas encore d'évaluation
- A-Saisir Le Besoin: S. Qualité EnquêteDocument1 pageA-Saisir Le Besoin: S. Qualité EnquêteMahrez ZaafouriPas encore d'évaluation
- 3-Recherche Des Solutions Pour Chaque FonctionDocument1 page3-Recherche Des Solutions Pour Chaque FonctionMahrez ZaafouriPas encore d'évaluation
- Sans Titre7Document1 pageSans Titre7Mahrez ZaafouriPas encore d'évaluation
- Page 4Document1 pagePage 4Mahrez ZaafouriPas encore d'évaluation
- 12Document1 page12Mahrez ZaafouriPas encore d'évaluation
- Document Constructeur Choix RéducteurDocument1 pageDocument Constructeur Choix RéducteurMahrez ZaafouriPas encore d'évaluation
- Extrait Du Guide Du Dessinateur IndustrielDocument1 pageExtrait Du Guide Du Dessinateur IndustrielMahrez ZaafouriPas encore d'évaluation
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Document1 pageBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Mahrez ZaafouriPas encore d'évaluation
- 2Document1 page2Mahrez ZaafouriPas encore d'évaluation
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Document1 pageBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Mahrez ZaafouriPas encore d'évaluation
- Page 5Document1 pagePage 5Mahrez ZaafouriPas encore d'évaluation
- Contrôle de La Clavette Parallèle: RemarqueDocument1 pageContrôle de La Clavette Parallèle: RemarqueMahrez ZaafouriPas encore d'évaluation
- Page 2Document1 pagePage 2Mahrez ZaafouriPas encore d'évaluation
- Page 3Document1 pagePage 3Mahrez ZaafouriPas encore d'évaluation
- Liaisons Equivalentes-3Document3 pagesLiaisons Equivalentes-3Mahrez ZaafouriPas encore d'évaluation
- 4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLDocument1 page4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLMahrez ZaafouriPas encore d'évaluation
- 3Document1 page3Mahrez ZaafouriPas encore d'évaluation
- Liaisons Equivalentes-1Document3 pagesLiaisons Equivalentes-1Mahrez ZaafouriPas encore d'évaluation
- Page 1Document1 pagePage 1Mahrez ZaafouriPas encore d'évaluation
- 1Document1 page1Mahrez ZaafouriPas encore d'évaluation
- I-Question 1: Iset SBZ CswaDocument1 pageI-Question 1: Iset SBZ CswaMahrez ZaafouriPas encore d'évaluation
- Iset SBZ CswaDocument1 pageIset SBZ CswaMahrez ZaafouriPas encore d'évaluation
- Contenu de La Formation CSWADocument1 pageContenu de La Formation CSWAMahrez ZaafouriPas encore d'évaluation
- I-Question 1: Iset SBZ CswaDocument1 pageI-Question 1: Iset SBZ CswaMahrez ZaafouriPas encore d'évaluation
- TD MS FerrahDocument12 pagesTD MS FerrahImene FerrahPas encore d'évaluation
- Regime SinusoidalDocument8 pagesRegime SinusoidalEmy ABPas encore d'évaluation
- Cat Omega Resilift 2016 FR 05 11-BajaDocument16 pagesCat Omega Resilift 2016 FR 05 11-Bajayacinealg1Pas encore d'évaluation
- Maple PCSI3Document20 pagesMaple PCSI3Jawad MaalPas encore d'évaluation
- Notion de Base en ÉlectroniqueDocument47 pagesNotion de Base en ÉlectroniqueWalid JaffaliPas encore d'évaluation
- 3 Prefs DecDocument4 pages3 Prefs DecTarhouni100% (1)
- Projet Fin de FormationDocument12 pagesProjet Fin de FormationDE llPas encore d'évaluation
- Fiche Technique Onduleur - SG250HXDocument2 pagesFiche Technique Onduleur - SG250HXkaltoum elmnaouarPas encore d'évaluation
- Cours PE IIA2 Chapitre 1 2020Document34 pagesCours PE IIA2 Chapitre 1 2020saif amriPas encore d'évaluation
- Hoss MocnDocument9 pagesHoss MocnHoussem MechichiPas encore d'évaluation
- TD1 CorrectionDocument21 pagesTD1 CorrectionMohamed Hamouch100% (1)
- t2 Con Elec2015 CadreuseDocument6 pagest2 Con Elec2015 CadreuseBen Hamda Fethi80% (5)
- TS Systemes Et Réseaux D - InformatiquesDocument83 pagesTS Systemes Et Réseaux D - Informatiquesaicha100% (1)
- M0109MPACG13Document124 pagesM0109MPACG13You ShinePas encore d'évaluation
- NORME DTR Essai de PressionDocument2 pagesNORME DTR Essai de Pressionyoucef tecPas encore d'évaluation
- WifiDocument11 pagesWifibadou3ati100% (1)
- Test D'habilitationDocument28 pagesTest D'habilitationMProd Ammo100% (1)
- ThermExcel - Programme HydroExcelDocument22 pagesThermExcel - Programme HydroExcelAnonymous gg2Mi4Pas encore d'évaluation
- OwnersManual Yamaha Expansion Manager FR Om v250 h0 PDFDocument25 pagesOwnersManual Yamaha Expansion Manager FR Om v250 h0 PDFfabianPas encore d'évaluation
- Sable ProjetDocument7 pagesSable ProjetMori NessrinePas encore d'évaluation
- Examen Technologie Des Composants 2 2016-2017Document2 pagesExamen Technologie Des Composants 2 2016-2017Ilyas Kendouci100% (1)
- Rapport Youssef PDFDocument17 pagesRapport Youssef PDFyoussefhero1100% (3)
- Note de Calcul Dalot 3x (4x4)Document17 pagesNote de Calcul Dalot 3x (4x4)Cheraiti AbdelmoumenePas encore d'évaluation
- Exercice Flexion Plane SimpleDocument1 pageExercice Flexion Plane Simpleabdourazg100% (1)
- Cours Analyse FonctionnelleDocument17 pagesCours Analyse Fonctionnellewass princePas encore d'évaluation
- Devoir 3 Ann ColegeDocument2 pagesDevoir 3 Ann Colegemourafiq faysalPas encore d'évaluation
- 1398 6 FR Pac Alfea Evolution UtilisationDocument20 pages1398 6 FR Pac Alfea Evolution Utilisationjean valjeanPas encore d'évaluation
- Céramiques TraditionnellesDocument7 pagesCéramiques Traditionnelleshakima elmenaniPas encore d'évaluation
- Compte Rendu FinalDocument37 pagesCompte Rendu FinalRafik SaadaPas encore d'évaluation
- PCExpert SUPINFODocument4 pagesPCExpert SUPINFORidha AbeidiPas encore d'évaluation