Vous aimerez peut-être aussi
- Eyes of NetworkDocument32 pagesEyes of Networkmerzoukmouhsine100% (1)
- 3 - Mouvements, Liaisons Et SchématisationDocument14 pages3 - Mouvements, Liaisons Et Schématisationhubertholloway723Pas encore d'évaluation
- CI05 Cours - Déterminer Le Modèle de Connaissance D'un Système AsserviDocument10 pagesCI05 Cours - Déterminer Le Modèle de Connaissance D'un Système AsservikamalPas encore d'évaluation
- Poly Théorie Des MécanismesDocument24 pagesPoly Théorie Des MécanismesJaksMaksPas encore d'évaluation
- LIAISONS Et Schematisation Et TorseursDocument16 pagesLIAISONS Et Schematisation Et TorseursHassanbfk BfkPas encore d'évaluation
- CI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument10 pagesCI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- Theorie Des MécaDocument0 pageTheorie Des MécaSemlali ZakariaPas encore d'évaluation
- Modelisation CinematiqueDocument16 pagesModelisation CinematiqueAnonymous tNIpOVPyPas encore d'évaluation
- CI01 Cours - Analyser Et Décrire La Structure D - Un SystèmeDocument9 pagesCI01 Cours - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- Modélisation Des MécanismesDocument29 pagesModélisation Des Mécanismeshidouriabdelmoumen9802100% (8)
- Chap 1 Modelisation Liaisons (B)Document2 pagesChap 1 Modelisation Liaisons (B)Bigue SowPas encore d'évaluation
- Cours Modélisation SLCIDocument29 pagesCours Modélisation SLCIdestextesecritsPas encore d'évaluation
- Cours MicrDocument30 pagesCours MicrDOUNIAPas encore d'évaluation
- CD 13 Schema 5Document18 pagesCD 13 Schema 5seye abdou azizPas encore d'évaluation
- RN IIA5 23 24 Ch6 EtudiantDocument6 pagesRN IIA5 23 24 Ch6 EtudiantMalak ChefridPas encore d'évaluation
- Systèmes Mécatroniques Chapitres 1 Et 2 - 2022-2023Document45 pagesSystèmes Mécatroniques Chapitres 1 Et 2 - 2022-2023ElnBEKKARYPas encore d'évaluation
- Chapitre 1Document6 pagesChapitre 1ademtalbi554Pas encore d'évaluation
- Cours 12 Modele MultiphysiqueDocument10 pagesCours 12 Modele Multiphysiqueapi34Pas encore d'évaluation
- Schematisation Des Systemes - SCM Et Liaison TSI1Document18 pagesSchematisation Des Systemes - SCM Et Liaison TSI1Fakhreddine NaimiPas encore d'évaluation
- Cours CT 1 Schematisation CinematiqueDocument5 pagesCours CT 1 Schematisation CinematiquePascal PonzoniPas encore d'évaluation
- Chapitre 2 PDFDocument4 pagesChapitre 2 PDFYasser NapoliPas encore d'évaluation
- SchematisationDocument3 pagesSchematisationHozepha Bhai BarmalPas encore d'évaluation
- CollesDocument1 pageCollesHugo PavyPas encore d'évaluation
- Construction MécaniqueDocument250 pagesConstruction MécaniqueSimo MabrouukPas encore d'évaluation
- (TDM) (CO) Theorie Des MecanismesDocument15 pages(TDM) (CO) Theorie Des MecanismesAhmed Othmen100% (1)
- Mecanique AtsDocument10 pagesMecanique Atscohen52frPas encore d'évaluation
- Programme Pedagogique Francais Genie Mecanique Tsi 1Document12 pagesProgramme Pedagogique Francais Genie Mecanique Tsi 1Marwan BouhdidiPas encore d'évaluation
- Modélisation Des Mécanismes0Document2 pagesModélisation Des Mécanismes0Manel AyebPas encore d'évaluation
- IIA - Régulation Et Asszervissement - Chap3 - Schema Bloc - 20 Oct 22Document4 pagesIIA - Régulation Et Asszervissement - Chap3 - Schema Bloc - 20 Oct 22TECHNOLOGIES MODERNES DU CAMEROUNPas encore d'évaluation
- 03 Cin 02 Modelisation Applications 05 EtauDocument3 pages03 Cin 02 Modelisation Applications 05 EtausaidPas encore d'évaluation
- MLM TC1Document10 pagesMLM TC1GamatekPas encore d'évaluation
- Theorie Des MecanismesDocument16 pagesTheorie Des MecanismesMeddour WassimPas encore d'évaluation
- Sciences de L'ingénieurDocument2 pagesSciences de L'ingénieurGuy YgalPas encore d'évaluation
- Automatique 1ereannee Partie2Document20 pagesAutomatique 1ereannee Partie2bhffuhPas encore d'évaluation
- SED Chapitre 1Document22 pagesSED Chapitre 1mehdi abidaPas encore d'évaluation
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesmounirgemPas encore d'évaluation
- Cin 02 Modelisation Applications 04Document2 pagesCin 02 Modelisation Applications 04Tigma AarousPas encore d'évaluation
- Cours AuDocument9 pagesCours AuAdil MehdaryPas encore d'évaluation
- SSEQ Cours - Décrire Le Comportement Des Systèmes SéquentielsDocument21 pagesSSEQ Cours - Décrire Le Comportement Des Systèmes SéquentielsSalim EL MARDIPas encore d'évaluation
- Liaisons Equivalentes-1Document3 pagesLiaisons Equivalentes-1Mahrez ZaafouriPas encore d'évaluation
- Modelisation MultiphysiqueDocument18 pagesModelisation MultiphysiqueseddikmorabetPas encore d'évaluation
- Construction MécaniqueDocument70 pagesConstruction MécaniqueMohamed EddriefPas encore d'évaluation
- Cours Thèorie Des Mécanismes (CI - GOI-DFMI) 19-20Document28 pagesCours Thèorie Des Mécanismes (CI - GOI-DFMI) 19-20Abderrahmane Ben ErajrajiPas encore d'évaluation
- TournageDocument13 pagesTournageChokri AtefPas encore d'évaluation
- Mecanismes PDFDocument34 pagesMecanismes PDFesloch50% (2)
- Chapitre 2Document10 pagesChapitre 2skaachPas encore d'évaluation
- PDFDocument6 pagesPDFSaad AttarPas encore d'évaluation
- Chapitre 4 Les LiaisonsDocument8 pagesChapitre 4 Les LiaisonsJean KABOREPas encore d'évaluation
- 2 HyperstatismeDocument9 pages2 HyperstatismeMaha HammamiPas encore d'évaluation
- Partie3 ING1Document40 pagesPartie3 ING1Bourezak CélinePas encore d'évaluation
- C5 CI 11 Schematisation Des Systemes - SCM Et Liaison 1TSI v2014Document17 pagesC5 CI 11 Schematisation Des Systemes - SCM Et Liaison 1TSI v2014dxsszszPas encore d'évaluation
- Chapitre1 RPDocument27 pagesChapitre1 RPFATEN BELLAKHDHARPas encore d'évaluation
- Indpet1mas Lessons-Identification DebbahDocument67 pagesIndpet1mas Lessons-Identification Debbahhamza elgarragPas encore d'évaluation
- 5166 6 Savoirs s5 s6 s7 Jpkrebs AraymondDocument60 pages5166 6 Savoirs s5 s6 s7 Jpkrebs AraymondArmand DE ROSAPas encore d'évaluation
- Cours Simulation Discrète-CH2Document78 pagesCours Simulation Discrète-CH2NarimenePas encore d'évaluation
- Chapter 1 StudentsDocument13 pagesChapter 1 StudentsGHIZLANE AADELPas encore d'évaluation
- Correction TDDocument5 pagesCorrection TDTasnym JalelPas encore d'évaluation
- Cours Theorie Des MecanismesDocument5 pagesCours Theorie Des MecanismessemahPas encore d'évaluation
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Sans Titre7Document1 pageSans Titre7Mahrez ZaafouriPas encore d'évaluation
- D-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionDocument1 pageD-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionMahrez ZaafouriPas encore d'évaluation
- Document Constructeur Choix RéducteurDocument1 pageDocument Constructeur Choix RéducteurMahrez ZaafouriPas encore d'évaluation
- 3-Recherche Des Solutions Pour Chaque FonctionDocument1 page3-Recherche Des Solutions Pour Chaque FonctionMahrez ZaafouriPas encore d'évaluation
- A-Saisir Le Besoin: S. Qualité EnquêteDocument1 pageA-Saisir Le Besoin: S. Qualité EnquêteMahrez ZaafouriPas encore d'évaluation
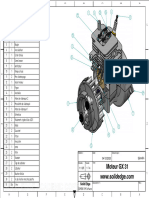
- Moteur GX 31: Solid EdgeDocument1 pageMoteur GX 31: Solid EdgeMahrez ZaafouriPas encore d'évaluation
- Présentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesDocument1 pagePrésentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesMahrez ZaafouriPas encore d'évaluation
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Document1 pageBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Mahrez ZaafouriPas encore d'évaluation
- Extrait Du Guide Du Dessinateur IndustrielDocument1 pageExtrait Du Guide Du Dessinateur IndustrielMahrez ZaafouriPas encore d'évaluation
- Page 4Document1 pagePage 4Mahrez ZaafouriPas encore d'évaluation
- 12Document1 page12Mahrez ZaafouriPas encore d'évaluation
- Page 5Document1 pagePage 5Mahrez ZaafouriPas encore d'évaluation
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Document1 pageBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Mahrez ZaafouriPas encore d'évaluation
- Page 2Document1 pagePage 2Mahrez ZaafouriPas encore d'évaluation
- Contrôle de La Clavette Parallèle: RemarqueDocument1 pageContrôle de La Clavette Parallèle: RemarqueMahrez ZaafouriPas encore d'évaluation
- Page 3Document1 pagePage 3Mahrez ZaafouriPas encore d'évaluation
- Liaisons Equivalentes-5Document5 pagesLiaisons Equivalentes-5Mahrez ZaafouriPas encore d'évaluation
- Liaisons Equivalente-4sDocument3 pagesLiaisons Equivalente-4sMahrez ZaafouriPas encore d'évaluation
- 2Document1 page2Mahrez ZaafouriPas encore d'évaluation
- Page 1Document1 pagePage 1Mahrez ZaafouriPas encore d'évaluation
- Liaisons Equivalentes-2Document5 pagesLiaisons Equivalentes-2Mahrez ZaafouriPas encore d'évaluation
- 4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLDocument1 page4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLMahrez ZaafouriPas encore d'évaluation
- Liaisons Equivalentes-1Document3 pagesLiaisons Equivalentes-1Mahrez ZaafouriPas encore d'évaluation
- 3Document1 page3Mahrez ZaafouriPas encore d'évaluation
- Iset SBZ CswaDocument1 pageIset SBZ CswaMahrez ZaafouriPas encore d'évaluation
- I-Question 1: Iset SBZ CswaDocument1 pageI-Question 1: Iset SBZ CswaMahrez ZaafouriPas encore d'évaluation
- I-Question 1: Iset SBZ CswaDocument1 pageI-Question 1: Iset SBZ CswaMahrez ZaafouriPas encore d'évaluation
- 1Document1 page1Mahrez ZaafouriPas encore d'évaluation
- Contenu de La Formation CSWADocument1 pageContenu de La Formation CSWAMahrez ZaafouriPas encore d'évaluation
- Légendes Celtiques Campagne ArmoricaineDocument7 pagesLégendes Celtiques Campagne ArmoricaineGurvan LandreinPas encore d'évaluation
- Manal 5Document11 pagesManal 5imad damiPas encore d'évaluation
- CAPE Physics U1 P1 Answers PDFDocument1 pageCAPE Physics U1 P1 Answers PDFKaylia WilsonPas encore d'évaluation
- Project de Construction Grand Theatre de RabatDocument85 pagesProject de Construction Grand Theatre de RabatMed LachPas encore d'évaluation
- 1.0 Science Et Biologie - A22 - ÉDocument41 pages1.0 Science Et Biologie - A22 - ÉGeorge SankariPas encore d'évaluation
- Génie Industriel Des FermentationsDocument29 pagesGénie Industriel Des FermentationsSarah SisiPas encore d'évaluation
- Dictionnaire Des Villages Du Wouri: Centre OrstomDocument28 pagesDictionnaire Des Villages Du Wouri: Centre OrstomMarcien TsasPas encore d'évaluation
- l1 Initiation A La Recherche Scientifiques)Document57 pagesl1 Initiation A La Recherche Scientifiques)Deby May100% (5)
- MP Sujet V6 - 11Document17 pagesMP Sujet V6 - 11Ahmed Med AbdellahiPas encore d'évaluation
- Contusion AbdoDocument27 pagesContusion Abdosouleymane barryPas encore d'évaluation
- TD Element de TuyauterieDocument2 pagesTD Element de TuyauterieFrancis SonkengPas encore d'évaluation
- La Perspective CavalièreDocument7 pagesLa Perspective Cavalièremanel_dr100% (6)
- Corrige TD1Document3 pagesCorrige TD1Nawres MsakniPas encore d'évaluation
- Intro Ghuraba (Etranger) PDFDocument16 pagesIntro Ghuraba (Etranger) PDFoukhtyPas encore d'évaluation
- 01 CourantContinuDocument38 pages01 CourantContinuBilal KaibaPas encore d'évaluation
- 124 LymphoedemeDocument19 pages124 Lymphoedemedr belaidi nadirPas encore d'évaluation
- RDM 6Document11 pagesRDM 6Salma ZahidPas encore d'évaluation
- IntroductionDocument6 pagesIntroductionchouroukPas encore d'évaluation
- Module 12. Etude Génie Civil - Mécanique Des Sols - TSGO - WatermarkDocument63 pagesModule 12. Etude Génie Civil - Mécanique Des Sols - TSGO - WatermarkAsmaa KasmiPas encore d'évaluation
- Chapitre I CHIMIE 1KHALED HOULI S 2022Document12 pagesChapitre I CHIMIE 1KHALED HOULI S 2022Seyf Eddine DJEBARPas encore d'évaluation
- Anneau ALG1Document4 pagesAnneau ALG1Esi SbaPas encore d'évaluation
- Pin (Plante)Document44 pagesPin (Plante)Htnb0Pas encore d'évaluation
- Questions Approfondies de Psychopathologie - FantiniDocument13 pagesQuestions Approfondies de Psychopathologie - FantiniChloé HuberlantPas encore d'évaluation
- Hypothese de CalculDocument4 pagesHypothese de CalculAmada TarekPas encore d'évaluation
- Kalima TwayyibahDocument58 pagesKalima TwayyibahjoejordanPas encore d'évaluation
- La Phonologie Séance 1Document8 pagesLa Phonologie Séance 1hicham hassouniPas encore d'évaluation
- Observation MédicaleDocument11 pagesObservation MédicaleQassifi Marwane100% (1)
- Méthodologie Quantitative Chap 3Document42 pagesMéthodologie Quantitative Chap 3Yassine Abbadi100% (2)
- Formation OHSE - EXPSECOP HSE en Opérations de Production - Ifp TrainingDocument4 pagesFormation OHSE - EXPSECOP HSE en Opérations de Production - Ifp TrainingLaureat NgomaPas encore d'évaluation