Vous aimerez peut-être aussi
- Conception Mécanique - Analyse Structurelle CMDocument22 pagesConception Mécanique - Analyse Structurelle CMsie Rachid TraorePas encore d'évaluation
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- Examen 2013 Correction PDFDocument10 pagesExamen 2013 Correction PDFNassim RabaouiPas encore d'évaluation
- Les Liaisons Mécaniques: I. Définition III. Degrés de LibertéDocument2 pagesLes Liaisons Mécaniques: I. Définition III. Degrés de Libertéjawaher100% (2)
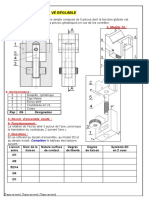
- Vé Réglable 2021Document4 pagesVé Réglable 2021hamrouniPas encore d'évaluation
- C R Reducteur 1Document16 pagesC R Reducteur 1Amal AmalPas encore d'évaluation
- Chap 2 - Traction - Compression-1Document8 pagesChap 2 - Traction - Compression-1Medeho kodjo Simon henochPas encore d'évaluation
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueNour Allah tabibPas encore d'évaluation
- 21 - Le Schéma Cinématique MinimaleDocument22 pages21 - Le Schéma Cinématique MinimaleManal El Matmour M'hairPas encore d'évaluation
- 12 - Le Schéma Cinématique MinimaleDocument31 pages12 - Le Schéma Cinématique MinimaleMahmoud Moncef100% (2)
- La Liaison Glissiere (Diapos)Document14 pagesLa Liaison Glissiere (Diapos)mehdiPas encore d'évaluation
- Cours DAO Chapitre 1Document24 pagesCours DAO Chapitre 1Halim DalilPas encore d'évaluation
- Chap2 Leçon2 3&4Document52 pagesChap2 Leçon2 3&4Guiliass100% (2)
- Rattrapage Corrigé 2012 PDFDocument7 pagesRattrapage Corrigé 2012 PDFGuiliassPas encore d'évaluation
- 9-Acouplements PermenantsDocument10 pages9-Acouplements PermenantsAbdelkarim GhanemPas encore d'évaluation
- Dess 1 Cours - Modelisation - Des - Liaisons - eDocument7 pagesDess 1 Cours - Modelisation - Des - Liaisons - eelvis etiennePas encore d'évaluation
- TP 32 ParaboleDocument7 pagesTP 32 ParaboleKesraoui HichemPas encore d'évaluation
- TD-Poulie Embrayage Centrifuge PFDDocument5 pagesTD-Poulie Embrayage Centrifuge PFDbhsbhs19Pas encore d'évaluation
- Analyse Structurale Des MécanismesDocument13 pagesAnalyse Structurale Des MécanismesSalomon S. HoungbedjiPas encore d'évaluation
- 19 Formalisation Schema CinematiqueDocument2 pages19 Formalisation Schema CinematiqueYoussef TrimechPas encore d'évaluation
- Poly 1 Cde Séquentielle IcamDocument44 pagesPoly 1 Cde Séquentielle IcamThéo FERNANDEZPas encore d'évaluation
- Shéma Cinématique 1LEM PDFDocument43 pagesShéma Cinématique 1LEM PDFThe AHM 1Pas encore d'évaluation
- الهندسة الكهربائية 3نشاطDocument110 pagesالهندسة الكهربائية 3نشاطadel imessPas encore d'évaluation
- TD Borne de Reglage EleveDocument6 pagesTD Borne de Reglage EleveDJ-NONO-88 emilioPas encore d'évaluation
- 2-Devoir de Controle N1-2AS-2021.31Document4 pages2-Devoir de Controle N1-2AS-2021.31Youssef Aouadi100% (1)
- 32 Loi Entrée Sortie Géométrique D 1Document6 pages32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- Sujet AFS 2020 PrincipalDocument25 pagesSujet AFS 2020 PrincipalIbrahim Êl BæzPas encore d'évaluation
- Chapitre - 02 - Architecture D'une Machine À CNDocument75 pagesChapitre - 02 - Architecture D'une Machine À CNChams Eddine DakhliPas encore d'évaluation
- Bureau Des Méthodes 1 BTS ESA 2021Document30 pagesBureau Des Méthodes 1 BTS ESA 2021LOLIPOOP100% (1)
- Transm TCTDocument9 pagesTransm TCTMohamed LarbiPas encore d'évaluation
- TP Scie SauteuseDocument5 pagesTP Scie SauteuseremivsnPas encore d'évaluation
- Etau D ModelisteDocument23 pagesEtau D ModelisteYoro Boubou SIDIBEPas encore d'évaluation
- La Mise en Position 1ere Partie de La Norme - PROFDocument6 pagesLa Mise en Position 1ere Partie de La Norme - PROFAbdelmoghit IdhsainePas encore d'évaluation
- Controle Theory Mecanismes Janvier 2015Document3 pagesControle Theory Mecanismes Janvier 2015Achraf El aouamePas encore d'évaluation
- Procedes D'asemblageDocument85 pagesProcedes D'asemblageImed SeghierPas encore d'évaluation
- Corrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonDocument8 pagesCorrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonpinamarkPas encore d'évaluation
- Liaisons Mécaniques Et Schéma Cinématique 02-03-17Document9 pagesLiaisons Mécaniques Et Schéma Cinématique 02-03-17Younes ElhamriPas encore d'évaluation
- TP10 Meca3D Scie SauteuseDocument3 pagesTP10 Meca3D Scie SauteuseC'est Yana100% (1)
- TD Doc ÉlèveDocument12 pagesTD Doc ÉlèveMurakamiensPas encore d'évaluation
- TP 2 Solidworks Liaisons Dans Les Mecanismes p1Document8 pagesTP 2 Solidworks Liaisons Dans Les Mecanismes p1Simo StitPas encore d'évaluation
- C26 Document Eleve - TP Application - Liaisons Et Schema Cinematique - Etau ModelismeDocument5 pagesC26 Document Eleve - TP Application - Liaisons Et Schema Cinematique - Etau ModelismeStef TfhPas encore d'évaluation
- Exercice BE2 Ensam MeknesDocument8 pagesExercice BE2 Ensam MeknesThe ShadowPas encore d'évaluation
- Exercices de DYNAMIQUE de RotationDocument13 pagesExercices de DYNAMIQUE de RotationYassir RochdPas encore d'évaluation
- D Synthèse3 2019 1SDocument6 pagesD Synthèse3 2019 1SAdel KmimechPas encore d'évaluation
- CS LP TP Pyvot SujetDocument20 pagesCS LP TP Pyvot Sujetpierre chantelotPas encore d'évaluation
- Devoir Commun Partie ProductionDocument16 pagesDevoir Commun Partie ProductionOmar Daali0% (1)
- 6 - Bride de SerrageDocument3 pages6 - Bride de SerrageElmouden MustaphaPas encore d'évaluation
- TCP-05-Rep-Projection-Orthogonale P 44Document1 pageTCP-05-Rep-Projection-Orthogonale P 44Jujo BugaPas encore d'évaluation
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyPas encore d'évaluation
- Cours CPGE - Modélisation Des Actions MécaniquesDocument11 pagesCours CPGE - Modélisation Des Actions MécaniquesAnonymous OG8ApT4go100% (2)
- Modélisation Des AM - Robot 5 Axes (Correction)Document2 pagesModélisation Des AM - Robot 5 Axes (Correction)hufioPas encore d'évaluation
- Examen A05 SolutionDocument7 pagesExamen A05 SolutionAbdallah SbaghdiPas encore d'évaluation
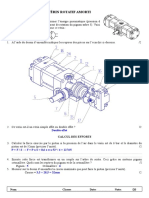
- TD - Vérin Rotatif AmortiDocument5 pagesTD - Vérin Rotatif AmortiLAILA BNPas encore d'évaluation
- Technique CCCDocument15 pagesTechnique CCCNÖÚ HÄPas encore d'évaluation
- Vis EcrouDocument31 pagesVis Ecrouwissal khammeriPas encore d'évaluation
- Torseurs Des Liaisons NormaliseesDocument3 pagesTorseurs Des Liaisons NormaliseesmugiwaraxPas encore d'évaluation
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- La Communication GénéralitésDocument2 pagesLa Communication GénéralitésmariemPas encore d'évaluation
- Neuvaine Au Sacre Coeur 2023Document7 pagesNeuvaine Au Sacre Coeur 2023murielle brouPas encore d'évaluation
- Electronique - Realisations - Thermostat 003Document10 pagesElectronique - Realisations - Thermostat 003DJAMel LPas encore d'évaluation
- Distribution Des Produits D'assurances 2Document13 pagesDistribution Des Produits D'assurances 2Naoual NaoualPas encore d'évaluation
- Syndrome Inflammatoire Chez Sujet ÂgéDocument2 pagesSyndrome Inflammatoire Chez Sujet Âgéchaimaa khalfiPas encore d'évaluation
- Trédé - Kairos Chez AristoteDocument14 pagesTrédé - Kairos Chez AristoteBaruch Von PankäkePas encore d'évaluation
- Circuit LogiqueDocument91 pagesCircuit Logiqueleibniz100% (9)
- Indicateurs de Resultats 2022 FormationDocument3 pagesIndicateurs de Resultats 2022 FormationNadia IDELARBIPas encore d'évaluation
- Littérature L2-G8Document22 pagesLittérature L2-G8Lilas Tulipe Lilas TulipePas encore d'évaluation
- Automate Programmable IndustrielDocument17 pagesAutomate Programmable IndustrielHassen BrahimPas encore d'évaluation
- Corr td1Document3 pagesCorr td1dude420Pas encore d'évaluation
- Assassins Creed Revelation COMPLETDocument60 pagesAssassins Creed Revelation COMPLETJulien ThorePas encore d'évaluation
- MF283+ Let's Gofr-0421Document31 pagesMF283+ Let's Gofr-0421chad tanPas encore d'évaluation
- Corrigé Portique IsostatiqueDocument2 pagesCorrigé Portique IsostatiqueMirindra Ravel100% (1)
- Sebp3825 04 01 All PDFDocument596 pagesSebp3825 04 01 All PDFSamsul Hadi Wong NenjapPas encore d'évaluation
- PARTIE 1introduction Au ManagementDocument61 pagesPARTIE 1introduction Au ManagementSIGUIPas encore d'évaluation
- Guide Complet Du Forex 1Document137 pagesGuide Complet Du Forex 1Anthony Dnl100% (1)
- Management Stratégique RésuméDocument50 pagesManagement Stratégique RésuméjadPas encore d'évaluation
- Configuration de La Voip Sur ElastixDocument8 pagesConfiguration de La Voip Sur ElastixIct labPas encore d'évaluation
- Licence Droit PriveDocument2 pagesLicence Droit PriveaboulazharPas encore d'évaluation
- Examen ProbaDocument2 pagesExamen ProbaHassan HamiPas encore d'évaluation
- Annales Islamologiques: Anisl 39 (2005), P. 1-8Document9 pagesAnnales Islamologiques: Anisl 39 (2005), P. 1-8Yehoshua FrenkelPas encore d'évaluation
- Zaha HadidDocument4 pagesZaha HadidZahïr Archi Nait MessehelPas encore d'évaluation
- ManagementDocument2 pagesManagementAsmaePas encore d'évaluation
- Projet PompeDocument23 pagesProjet PompeRed Nac0% (1)
- French 4am17 1trim2Document1 pageFrench 4am17 1trim2Omar Baha KaouachePas encore d'évaluation
- Reseau Advanced LTE PDFDocument83 pagesReseau Advanced LTE PDFachrafPas encore d'évaluation
- CNRT GUIDE Methodologique Ophiostruct - Tome TECH Edition 2020Document91 pagesCNRT GUIDE Methodologique Ophiostruct - Tome TECH Edition 2020FoulaniPas encore d'évaluation
- Le Metamorphisme Et Sa Relation Avec La Tectonique Des Plaques CoursDocument10 pagesLe Metamorphisme Et Sa Relation Avec La Tectonique Des Plaques Coursahmed mttouguiPas encore d'évaluation
- Plan de La PTCDocument6 pagesPlan de La PTCFlorian RousselPas encore d'évaluation