Vous aimerez peut-être aussi
- Cours Guidage TranslationDocument12 pagesCours Guidage TranslationKali Abdennour0% (1)
- Cours CotationDocument1 pageCours Cotationabdourazg100% (1)
- Devoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelDocument4 pagesDevoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelAnta diama sambe100% (1)
- Corrigé Exercice 1 - BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.Document12 pagesCorrigé Exercice 1 - BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.MATOUMBA PAULINPas encore d'évaluation
- TD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDocument4 pagesTD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDrisse Achar60% (5)
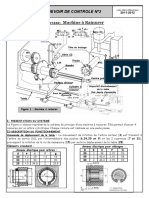
- Machine A Rainurer: Epreuve: Genie MecaniqueDocument5 pagesMachine A Rainurer: Epreuve: Genie MecaniqueNajet MarsPas encore d'évaluation
- dc2 3tech 2011 2012Document7 pagesdc2 3tech 2011 2012Bouabdellaoui saif ennasrPas encore d'évaluation
- FormualireDocument5 pagesFormualireAdil Hassani IdrissiPas encore d'évaluation
- Sujets de Méca Géné 2009Document110 pagesSujets de Méca Géné 2009souheil_sou100% (4)
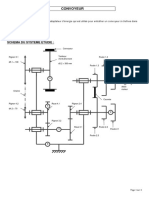
- EPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeDocument6 pagesEPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeYounes El GhandouriPas encore d'évaluation
- Devoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFDocument15 pagesDevoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFmohamed1101Pas encore d'évaluation
- Contrôle Continu - Dessin Technique II - Juin 2020 - BonDocument7 pagesContrôle Continu - Dessin Technique II - Juin 2020 - BonStephane FochePas encore d'évaluation
- Embrayages Frein 10 11 12Document8 pagesEmbrayages Frein 10 11 12Ah MédPas encore d'évaluation
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZIPas encore d'évaluation
- Devoir Cn1 2as 2012 v1Document3 pagesDevoir Cn1 2as 2012 v1walidbhyPas encore d'évaluation
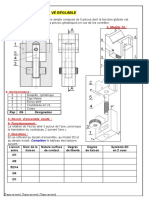
- Vé Réglable 2021Document4 pagesVé Réglable 2021hamrouniPas encore d'évaluation
- Devoir de Synthèse N°3 2010 2011 (Hazel T)Document9 pagesDevoir de Synthèse N°3 2010 2011 (Hazel T)Kereme JulienPas encore d'évaluation
- DS2 PDFDocument8 pagesDS2 PDFAbdelilah Elmesbahi100% (1)
- Siege D'avionDocument4 pagesSiege D'avionakouPas encore d'évaluation
- Exercice ConvoyeurDocument6 pagesExercice ConvoyeurHajar AmalouPas encore d'évaluation
- Corrigé TD 23 - Comportement Statique Des SystèmesDocument7 pagesCorrigé TD 23 - Comportement Statique Des Systèmesbhs channelPas encore d'évaluation
- Hyperstatisme Et Mobilité: Liaisons en ParallèleDocument11 pagesHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaPas encore d'évaluation
- Géometrie de MassesDocument4 pagesGéometrie de MasseskajtiPas encore d'évaluation
- Tronconneuse AutomatiseeDocument2 pagesTronconneuse AutomatiseeRouaissi RidhaPas encore d'évaluation
- CS LP TP Pyvot SujetDocument20 pagesCS LP TP Pyvot Sujetpierre chantelotPas encore d'évaluation
- Programmation Exercice N°2Document3 pagesProgrammation Exercice N°2mathieu.angeardPas encore d'évaluation
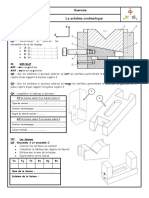
- Exercice Schema CinematiqueDocument4 pagesExercice Schema CinematiqueNeji Hmani100% (2)
- Série D'exercices N°2 - Génie Mécanique Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°2 - Génie Mécanique Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah Marouannarim100% (1)
- Exercices Schéma CinématiqueDocument13 pagesExercices Schéma CinématiqueHajar Ben GaraâPas encore d'évaluation
- TD Palan Électrique À Chaine1Document4 pagesTD Palan Électrique À Chaine1xz4 zertoxPas encore d'évaluation
- Touret A Meuler Corrige PDFDocument2 pagesTouret A Meuler Corrige PDFMohamed Soibaha ChaambanePas encore d'évaluation
- Corrige Technique 2014Document95 pagesCorrige Technique 2014Mohamed100% (1)
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapePas encore d'évaluation
- Dessin D'ensemble Correction - DWGDocument1 pageDessin D'ensemble Correction - DWGNajla AmriPas encore d'évaluation
- TD 3 TM 2020Document7 pagesTD 3 TM 2020Ammar AthmaniaPas encore d'évaluation
- Tableau Des Shemas MecaniquesDocument1 pageTableau Des Shemas MecaniquesntabPas encore d'évaluation
- CS-TM1-TD Hyperstatisme Pompe Prise Camion CorrectionDocument7 pagesCS-TM1-TD Hyperstatisme Pompe Prise Camion CorrectionPierre LancelotPas encore d'évaluation
- Production Mecanique: Cours deDocument111 pagesProduction Mecanique: Cours deAhmed KanounPas encore d'évaluation
- TD1-Dispositif de SerrageDocument6 pagesTD1-Dispositif de SerrageAlbertø Là VïtëssëPas encore d'évaluation
- Technique CDocument8 pagesTechnique CKarim FathiPas encore d'évaluation
- 4 - Montage Des Roulements Et Des CoussinetsDocument10 pages4 - Montage Des Roulements Et Des CoussinetsISMAILPas encore d'évaluation
- Devoir de Controle N1-1AS-2021-hache ViandesDocument3 pagesDevoir de Controle N1-1AS-2021-hache ViandesSaber Maalaoui0% (1)
- Guidage en TranslationDocument5 pagesGuidage en TranslationAVEGUEPas encore d'évaluation
- Chapitre 2 Liaison Complete ProfDocument8 pagesChapitre 2 Liaison Complete Profstylo azregPas encore d'évaluation
- Siege D'avionDocument4 pagesSiege D'avionAbdel Elouaer100% (1)
- Série D'exercices N°9 - Génie Mécanique - Cotation FCT Et Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°9 - Génie Mécanique - Cotation FCT Et Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanGhayth Bouzayani100% (1)
- Micro TourDocument1 pageMicro TourGraba AbdelhakimPas encore d'évaluation
- Cours - Génie Mécanique - Cotation Fonctionnelle - 3ème Technique (2018-2019) MR Dhifaoui Abdelwaheb PDFDocument9 pagesCours - Génie Mécanique - Cotation Fonctionnelle - 3ème Technique (2018-2019) MR Dhifaoui Abdelwaheb PDFYounes YounssPas encore d'évaluation
- Bride Hydraulique Anafonct PDFDocument6 pagesBride Hydraulique Anafonct PDFOmar HamaniPas encore d'évaluation
- Chapitre 5 Équations Generales D'elasticite LineaireDocument11 pagesChapitre 5 Équations Generales D'elasticite LineaireYounes DahPas encore d'évaluation
- Sujet 3 PDFDocument5 pagesSujet 3 PDFMohamed Snoussi0% (1)
- Corrigé Partiel 1-2018Document4 pagesCorrigé Partiel 1-2018Ramdane BoulahiaPas encore d'évaluation
- Exercice REPRESENTATION DES FILETAGESDocument1 pageExercice REPRESENTATION DES FILETAGESkingslimPas encore d'évaluation
- 4-Les FreinsDocument13 pages4-Les FreinsChokri AtefPas encore d'évaluation
- DS 04 MpsiDocument6 pagesDS 04 MpsistophPas encore d'évaluation
- TD N°3 PFS AnalytiqueDocument6 pagesTD N°3 PFS AnalytiqueRoubaPas encore d'évaluation
- DS5 SujetDocument7 pagesDS5 SujetPierre BeckPas encore d'évaluation
- Elements FinisDocument15 pagesElements FinisYounesHamoudiPas encore d'évaluation
- TD N°2 Torseur Des Actions Mécaniques Transmissibles Par Les LaisonsDocument3 pagesTD N°2 Torseur Des Actions Mécaniques Transmissibles Par Les LaisonsAZIZPas encore d'évaluation
- Diagramme D - Etat ccp2017 Psi PDFDocument2 pagesDiagramme D - Etat ccp2017 Psi PDFCHARLIE / شارليPas encore d'évaluation
- CORRIGE TD 1 PFS Effecteurs Chaine Ouverte PDFDocument8 pagesCORRIGE TD 1 PFS Effecteurs Chaine Ouverte PDFCHARLIE / شارلي100% (1)
- Combinatoire Et Bascules PDFDocument2 pagesCombinatoire Et Bascules PDFCHARLIE / شارليPas encore d'évaluation
- DL11Document2 pagesDL11CHARLIE / شارليPas encore d'évaluation
- TD Nâ°2 Meca Fluide LGBM 1Document3 pagesTD Nâ°2 Meca Fluide LGBM 1Mbarick FallPas encore d'évaluation
- BSK-G3B-Projet 2-Livrable 5Document8 pagesBSK-G3B-Projet 2-Livrable 5JossPas encore d'évaluation
- MODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Document10 pagesMODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Andreas NGASTE100% (1)
- Fiche TD N°1Document2 pagesFiche TD N°1Chaima Agha100% (1)
- Note de Calcul Radier Et Nervures Du 12062017 PDF Élasticité (Physique) Mécanique Des Milieux ContinusDocument1 pageNote de Calcul Radier Et Nervures Du 12062017 PDF Élasticité (Physique) Mécanique Des Milieux ContinusBertrand KamatoPas encore d'évaluation
- TP2 - Effort TranchantDocument9 pagesTP2 - Effort TranchantKIYOMI FFPas encore d'évaluation
- 11-Oscill Mec Libres PDFDocument9 pages11-Oscill Mec Libres PDFAzizElheniPas encore d'évaluation
- Ondes Mecaniques ExercicesDocument9 pagesOndes Mecaniques Exercicesprof laghmachPas encore d'évaluation
- C5 CI 11 Schematisation Des Systemes - SCM Et Liaison 1TSI v2014Document17 pagesC5 CI 11 Schematisation Des Systemes - SCM Et Liaison 1TSI v2014dxsszszPas encore d'évaluation
- LE Chapitre I: Rappels Généraux. 1Document481 pagesLE Chapitre I: Rappels Généraux. 1sarra jouiliPas encore d'évaluation
- 01 Dynamique Des SolidesDocument14 pages01 Dynamique Des SolidesIheb KarimPas encore d'évaluation
- TD-Gravitation Universelle - LSLL-2024 - WahabdioDocument3 pagesTD-Gravitation Universelle - LSLL-2024 - WahabdioAmadou Oury DialloPas encore d'évaluation
- Chimie 2Document5 pagesChimie 2Malki imanePas encore d'évaluation
- Rapport Structure: PitanceDocument206 pagesRapport Structure: PitanceKamal BoughzafPas encore d'évaluation
- Fiche Synthese Energie CinetiqueDocument2 pagesFiche Synthese Energie CinetiqueBenjamin JavaudinPas encore d'évaluation
- Master Boubekri MahamatDocument83 pagesMaster Boubekri MahamatReffis Bachir100% (1)
- TP AsservissementsDocument5 pagesTP AsservissementsibouPas encore d'évaluation
- TD MECANIQUE DES FLUIDES - Docx AZADocument4 pagesTD MECANIQUE DES FLUIDES - Docx AZAMAMANE SOULEYPas encore d'évaluation
- Chapitre4-Ecoulements en Milieu PoreuxDocument44 pagesChapitre4-Ecoulements en Milieu PoreuxyassinePas encore d'évaluation
- Ds2-2ème-Pot de Fleurs 2020-2021Document10 pagesDs2-2ème-Pot de Fleurs 2020-2021Adam BensaidPas encore d'évaluation
- Calcul Des CuléesDocument14 pagesCalcul Des CuléesMahamane MaâzouPas encore d'évaluation
- T D Port IqueDocument4 pagesT D Port IqueNassib TarikPas encore d'évaluation
- Chapitre IiDocument15 pagesChapitre IiZahi DrawPas encore d'évaluation
- Données Thermodynamiques Des Éléments ChimiquesDocument25 pagesDonnées Thermodynamiques Des Éléments ChimiquesRemi Joel Boris EssecofyPas encore d'évaluation
- Condensateur Et Dipole RCDocument2 pagesCondensateur Et Dipole RCعبد الحميدPas encore d'évaluation
- CH 04Document96 pagesCH 04Soufiane MoustakbalPas encore d'évaluation
- Leçon 4:: Notion de ForceDocument6 pagesLeçon 4:: Notion de ForceNourPas encore d'évaluation
- Mini Projet-4Document3 pagesMini Projet-4You NesPas encore d'évaluation
- Exploitation Élastique Et Plastique Des SectionsDocument7 pagesExploitation Élastique Et Plastique Des SectionsChahrazed ZelloutaPas encore d'évaluation
- Compte Rendu - TP - Mécanique Des Solides RigidesDocument22 pagesCompte Rendu - TP - Mécanique Des Solides Rigidessoulaimane lafhalPas encore d'évaluation