Vous aimerez peut-être aussi
- Blade Runner de Philip K. Dick: Philosophie et science-fictionD'EverandBlade Runner de Philip K. Dick: Philosophie et science-fictionPas encore d'évaluation
- ONERA Presentation Conference Robots 032013Document40 pagesONERA Presentation Conference Robots 032013Fayez LandolsiPas encore d'évaluation
- Commande de Robots de ManipulationDocument15 pagesCommande de Robots de Manipulationfellah baha eddinePas encore d'évaluation
- Evolution de La RobotiqueDocument7 pagesEvolution de La Robotiquemeone99Pas encore d'évaluation
- Aérogel: Vous voulez coloniser Mars ? L'aérogel pourrait nous aider à cultiver et à survivre sur Mars "de notre vivant"D'EverandAérogel: Vous voulez coloniser Mars ? L'aérogel pourrait nous aider à cultiver et à survivre sur Mars "de notre vivant"Pas encore d'évaluation
- Chapitre 1Document9 pagesChapitre 1Houssem TimoumiPas encore d'évaluation
- Cours Robot Mobile Master CO - 1ere PartieDocument33 pagesCours Robot Mobile Master CO - 1ere Partiehamdi jihen100% (1)
- RobotDocument15 pagesRobotbenke manouPas encore d'évaluation
- Evolution Et Histoire de La RobotiqueDocument35 pagesEvolution Et Histoire de La Robotiqueapi-305312656100% (1)
- Chapiter IDocument13 pagesChapiter IBouznad Houssem EddinePas encore d'évaluation
- Parm Robmob1Document35 pagesParm Robmob1mc-fatiguePas encore d'évaluation
- Course 1 Robots, Bots Et Agents PDFDocument29 pagesCourse 1 Robots, Bots Et Agents PDFMarcela DobrePas encore d'évaluation
- Introduction NBDocument29 pagesIntroduction NBLarbi ElbakkaliPas encore d'évaluation
- Etude BibliographiueDocument6 pagesEtude BibliographiueIbra YAACOUBIPas encore d'évaluation
- Chapitre1: Généralité Sur Les RobotsDocument43 pagesChapitre1: Généralité Sur Les RobotsNada serine ZouanePas encore d'évaluation
- I RobotDocument1 pageI RobotElisabeth OudarPas encore d'évaluation
- La Robotique Humanoã deDocument3 pagesLa Robotique Humanoã debalthazarjbPas encore d'évaluation
- RapportDocument21 pagesRapportAmine MohsniPas encore d'évaluation
- Artificielle Ne Fait Plus Partie de L'imaginaire Et de Plus en Plus, Nous L'utilisons DansDocument3 pagesArtificielle Ne Fait Plus Partie de L'imaginaire Et de Plus en Plus, Nous L'utilisons DansImPas encore d'évaluation
- Histoire AutomatesDocument18 pagesHistoire AutomatesMohamed NASIMIPas encore d'évaluation
- Un Robot Cest QuoiDocument17 pagesUn Robot Cest QuoiImsauok NemiranPas encore d'évaluation
- Anglais Entreprise Robotique EspaceDocument1 pageAnglais Entreprise Robotique Espaceorion.13ferrPas encore d'évaluation
- Chapitre 1Document6 pagesChapitre 1qzm74l100% (1)
- EEA RobotiqueDocument4 pagesEEA Robotiqueclerc ntPas encore d'évaluation
- RobInd Ch1p2Document33 pagesRobInd Ch1p2Abdelhak EL HraichaPas encore d'évaluation
- Contenu 3Document32 pagesContenu 3bilaPas encore d'évaluation
- Chapitre I Robotique LMIDocument12 pagesChapitre I Robotique LMIMor ChedoPas encore d'évaluation
- Jesa 2001Document37 pagesJesa 2001Ariane KamdemPas encore d'évaluation
- Housesold RobotsDocument25 pagesHousesold RobotsmbulukujosephPas encore d'évaluation
- Chap 1Document32 pagesChap 1aymenabderrahmen9Pas encore d'évaluation
- Presentation RobotDocument6 pagesPresentation RobotJean KrashlinePas encore d'évaluation
- Histoire AutomatesDocument12 pagesHistoire AutomatesAbdelali KhalilPas encore d'évaluation
- RobotsDocument16 pagesRobotsdrissi kaitouni zinebPas encore d'évaluation
- Test RobotiqueDocument7 pagesTest RobotiqueMarcela DobrePas encore d'évaluation
- La RobotiqueDocument2 pagesLa Robotiquekoutbiouafaa2021Pas encore d'évaluation
- Inirobot Dialogue ObjectifsDocument11 pagesInirobot Dialogue Objectifsmouahi1862Pas encore d'évaluation
- RobotsDocument22 pagesRobots77_LouisPas encore d'évaluation
- Chapitre 1Document9 pagesChapitre 1capoPas encore d'évaluation
- Bras ManipulateurDocument34 pagesBras ManipulateurOussama AhakkarPas encore d'évaluation
- Cours AUT M1 ROBDocument55 pagesCours AUT M1 ROBBrice KuetePas encore d'évaluation
- ATELIER B1 - Unité 7Document60 pagesATELIER B1 - Unité 7Phuong NguyenPas encore d'évaluation
- Chap 1 SLIDEDocument20 pagesChap 1 SLIDEFeDi LimEmPas encore d'évaluation
- Les Robots ExplorateursDocument6 pagesLes Robots ExplorateursDriss SOUALHIPas encore d'évaluation
- Technologie-DNB-Blanc-Drone-et-robot-terrestreDocument5 pagesTechnologie-DNB-Blanc-Drone-et-robot-terrestremnkwxjfthzPas encore d'évaluation
- Systeme RobotiqueDocument8 pagesSysteme Robotiquehouyam hamdiPas encore d'évaluation
- Initiation À La RobotiqueDocument10 pagesInitiation À La RobotiqueRodrigue SiaPas encore d'évaluation
- RP HistoriqueDocument7 pagesRP HistoriquearinaPas encore d'évaluation
- RobotiqueDocument214 pagesRobotiqueBentchikou MohPas encore d'évaluation
- Technologie-DNB-Blanc-Drone-et-robot-terrestre-corrigéDocument6 pagesTechnologie-DNB-Blanc-Drone-et-robot-terrestre-corrigémnkwxjfthzPas encore d'évaluation
- Exposé CouleurDocument2 pagesExposé CouleurRomane georgesPas encore d'évaluation
- Projet RobotDocument49 pagesProjet RobotNawres MsakniPas encore d'évaluation
- Infos Utiles Projet Ozobot - Num50Document4 pagesInfos Utiles Projet Ozobot - Num50Segpa SalengroPas encore d'évaluation
- Expose de FrancaisDocument12 pagesExpose de FrancaisbradPas encore d'évaluation
- TP RobotiqueDocument11 pagesTP Robotiquesouhil djoghlafPas encore d'évaluation
- Partie Théorique TestDocument6 pagesPartie Théorique TestPatdPas encore d'évaluation
- Echolocalisation HumaineDocument17 pagesEcholocalisation HumaineMJ KillerPas encore d'évaluation
- 5875 La Robotique Industrielle Eduscol 2015 - 0Document63 pages5875 La Robotique Industrielle Eduscol 2015 - 0Quãng LêPas encore d'évaluation
- Chapitre I Systèmes Mécanique Articulés Et Robotique Introduction - Boutaani 2020Document60 pagesChapitre I Systèmes Mécanique Articulés Et Robotique Introduction - Boutaani 2020billy ben100% (1)
- Calendrier Dates Importante Ea 2023Document1 pageCalendrier Dates Importante Ea 2023Fahem AdjaoudPas encore d'évaluation
- Université Gamal Abdel Nasser de Conakry Institut Polytechnique Département de Génie Civil Licence 3 Année Universitaire 2022-2023Document61 pagesUniversité Gamal Abdel Nasser de Conakry Institut Polytechnique Département de Génie Civil Licence 3 Année Universitaire 2022-2023Mamadou bobo DiengPas encore d'évaluation
- Résultats SE 2022Document53 pagesRésultats SE 2022baba kalil keitaPas encore d'évaluation
- 1er MODULE L2Document4 pages1er MODULE L2Mamadou bobo DiengPas encore d'évaluation
- Université GANC Institut Polytechnique: Département de Génie Civil / Direction de Programme en LicenceDocument1 pageUniversité GANC Institut Polytechnique: Département de Génie Civil / Direction de Programme en LicenceMamadou bobo DiengPas encore d'évaluation
- Université GANC Institut Polytechnique: Département de Génie Civil / Direction de Programme en LicenceDocument1 pageUniversité GANC Institut Polytechnique: Département de Génie Civil / Direction de Programme en LicenceMamadou bobo DiengPas encore d'évaluation
- Résultats SM 2022Document117 pagesRésultats SM 2022Abdoulaye BarryPas encore d'évaluation
- 1er MODULE L2Document4 pages1er MODULE L2Mamadou bobo DiengPas encore d'évaluation
- Architecture Moderne Etablissements CSDMDocument40 pagesArchitecture Moderne Etablissements CSDMMamadou bobo DiengPas encore d'évaluation
- Université de Lorraine: Dispositif Accueil Avant Le DépartDocument1 pageUniversité de Lorraine: Dispositif Accueil Avant Le DépartMamadou bobo DiengPas encore d'évaluation
- II Administration Réseau Sous GNU/Linux ObjectifsDocument60 pagesII Administration Réseau Sous GNU/Linux ObjectifsMamadou bobo DiengPas encore d'évaluation
- Enpc Brochure Ingenieur 2022Document44 pagesEnpc Brochure Ingenieur 2022Mamadou bobo DiengPas encore d'évaluation
- CafeierDocument7 pagesCafeierMamadou bobo DiengPas encore d'évaluation
- Syllabus Master: P Eriode D'Accr EDITATION: 2022 / 2026Document40 pagesSyllabus Master: P Eriode D'Accr EDITATION: 2022 / 2026Mamadou bobo DiengPas encore d'évaluation
- Syllabus Master: P Eriode D'Accr EDITATION: 2022 / 2026Document34 pagesSyllabus Master: P Eriode D'Accr EDITATION: 2022 / 2026Mamadou bobo DiengPas encore d'évaluation
- Cours Labo Partie 6 - Les SolsDocument49 pagesCours Labo Partie 6 - Les SolsDca GC FsttPas encore d'évaluation
- Enpc Plaquette Gcgoe HdsansDocument8 pagesEnpc Plaquette Gcgoe HdsansMamadou bobo DiengPas encore d'évaluation
- Syl 1ere Annee GcgeoDocument40 pagesSyl 1ere Annee GcgeoMamadou bobo DiengPas encore d'évaluation
- 0-190121 Programme Archicad Architecture 6jDocument6 pages0-190121 Programme Archicad Architecture 6jMamadou bobo DiengPas encore d'évaluation
- Master Génie CivilDocument4 pagesMaster Génie CivilMamadou bobo DiengPas encore d'évaluation
- Département Génie Civil Et Construction: Cursus GCC Classique 2022-2023Document2 pagesDépartement Génie Civil Et Construction: Cursus GCC Classique 2022-2023Mamadou bobo DiengPas encore d'évaluation
- CTN504 Cours 7 PDFDocument32 pagesCTN504 Cours 7 PDFWalid MatallahPas encore d'évaluation
- Sco BP1Document5 pagesSco BP1Philippe Diego DelasvegasPas encore d'évaluation
- Hygiène HospitalièreDocument4 pagesHygiène HospitalièreJamal MalouPas encore d'évaluation
- Chimie QuantiqueDocument5 pagesChimie Quantiquedavinccicode100% (1)
- CPS ClimatisationDocument2 pagesCPS Climatisationilyass tourkiPas encore d'évaluation
- Syllabus LAITS ET PRODUITS LAITIERS - 2Document3 pagesSyllabus LAITS ET PRODUITS LAITIERS - 2Gedion DouaPas encore d'évaluation
- NF EN 1993-1-7 NA Aout 2008Document4 pagesNF EN 1993-1-7 NA Aout 2008fauvyPas encore d'évaluation
- AUguste Blanqui L'Éternité Par Les AstresDocument79 pagesAUguste Blanqui L'Éternité Par Les AstresYvan KalievPas encore d'évaluation
- Estem: Eau Dans Le SolDocument27 pagesEstem: Eau Dans Le SolAlli BoukhchPas encore d'évaluation
- Mur Types PDFDocument76 pagesMur Types PDFWafaa ElyaâgoubiPas encore d'évaluation
- Glossaire Les Littoraux - PufDocument11 pagesGlossaire Les Littoraux - PufAndréaPas encore d'évaluation
- Exos PDT Conjugaison G1Document16 pagesExos PDT Conjugaison G1Olivier Benard100% (1)
- Matièreexamen 4 Ème Aet DDocument6 pagesMatièreexamen 4 Ème Aet DToby 17Pas encore d'évaluation
- TD2 MCC Corrigé InfotroniqueDocument3 pagesTD2 MCC Corrigé InfotroniqueRima AlayaPas encore d'évaluation
- Cours OrdonnacementDocument17 pagesCours OrdonnacementMed ArefPas encore d'évaluation
- Catalogue PHOTOFLEX en FrancaisDocument26 pagesCatalogue PHOTOFLEX en FrancaisAllanlitwinPas encore d'évaluation
- Cours de Gestion de Production 1.2.3 Gmp2 VPDocument30 pagesCours de Gestion de Production 1.2.3 Gmp2 VPMohamed SabrePas encore d'évaluation
- Page D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningDocument1 pagePage D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningzhcczgfbmwPas encore d'évaluation
- Enquête de Fréquentation Culturelle 2015 PDFDocument35 pagesEnquête de Fréquentation Culturelle 2015 PDFilikesummer1234Pas encore d'évaluation
- Jeremie Gouyon Ok-2Document289 pagesJeremie Gouyon Ok-2leucinedijaPas encore d'évaluation
- Examples Questions Examen AcoustiqueDocument4 pagesExamples Questions Examen AcoustiquePierreFontenellePas encore d'évaluation
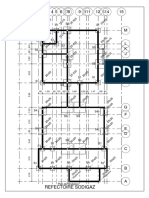
- Structure REFECTOIRE SODIGAZ PDFDocument44 pagesStructure REFECTOIRE SODIGAZ PDFheheheyPas encore d'évaluation
- AFAM - Projet de RechercheDocument23 pagesAFAM - Projet de RechercheAlbert Francis Abega MekongoPas encore d'évaluation
- Composition Et Correction Français 1AP T2Document4 pagesComposition Et Correction Français 1AP T2Boud Aek100% (1)
- Cours 3 ProthèseDocument4 pagesCours 3 ProthèseDDan2005Pas encore d'évaluation
- S o Mortaiseuse MechesDocument2 pagesS o Mortaiseuse Mechesp bwPas encore d'évaluation
- Sup'air SellettesDocument1 pageSup'air SellettesStefanoPas encore d'évaluation
- TIG Ta33 Panneau de Commande FRDocument22 pagesTIG Ta33 Panneau de Commande FRk.a55Pas encore d'évaluation
- Solution TD3 Module POO Univ OuarglaDocument7 pagesSolution TD3 Module POO Univ OuarglaEmna KanzariPas encore d'évaluation
- Cas IS AmortissementsDocument3 pagesCas IS AmortissementsT. AndersonPas encore d'évaluation
- Facteur de PuissanceDocument9 pagesFacteur de PuissancesonoumoudjibouPas encore d'évaluation
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)