Académique Documents
Professionnel Documents
Culture Documents
TD Ap2
Transféré par
omarTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
TD Ap2
Transféré par
omarDroits d'auteur :
Formats disponibles
Royaume du Maroc
OFFICE DE LA FORMATION PROFESSIONNELLE ET DE LA PROMOTION DU TRAVAIL
1. L’analogique (SLC 500) et marche-arrêt (GRAFCET)
NOM : ______________________________________________
DATE: _________________ GROUPE : __________________
ENTRÉE ÉLECTRIQUE WATTMÈTRE
SLC 5//02 CPU OUTPUT INPUT INPUT
POWER 0 4 8 12 0 4 8 12
POWER
1 5 9 13 1 5 9 13
2 6 10 14 2 6 10 14
MODULE D'ENTRÉE
3 7 11 15 3 7 11 15 ANALOGIQUE
ANALOG
AB ALLEN-BRADLEY Triac/100-240V
PANNEAU ÉLECTRIQUE
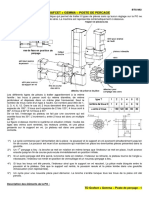
FIGURE 1-1 : A U T O M AT E SLC 500
La consommation électrique de l’alimentation d’un appareil doit être étroitement surveillée et
contrôlée de manière à être maintenue égale ou inférieure à 240 kVA et ce, afin de répondre aux
lois en vigueur. L’alimentation triphasée 550VCA provient d’un disjoncteur de 500 A.
Un wattmètre possèdant une sortie 4-20mA est calibré pour mesurer entre 0 à 400kVA. Cette
entrée se situe sur le canal 0 du module NI4 de l’automate de la figure 1-1.
Question #1 - (3 points) Référez-vous à la figure 1-1.
Quelle est l’adresse de l’entrée analogique reliée à la sortie 4-20mA du wattmètre?
Question #2 - (3 points) Référez-vous à la figure 1-1.
Quel sera le code binaire en mémoire de l’entrée analogique si la puissance est présentement de
160kVA?
Question #3 - (3 points) Référez-vous à la figure 1-1. Aucun traitement n’a été fait au niveau
de la mise à l’échelle. Réalisez la programmation suivante :
Un voyant lumineux est placé sur la première sortie du module tout-ou-rien de la figure 1-1. Ce
dernier doit s’allumer lorsque la puissance est entre 220kVA et 240kVA. Si la puissance dépasse
240KVA, ce même voyant doit clignoter. Utilisez le bit interne S:4/6 qui change d’état à toutes
les 640 msec. (640 msec. à ON et 640 msec. à OFF).
Examen Théorique 1 Cours 11A OFPPT/TECCART
Évaluation Automates Programmables II
Sortie Analogique
Conduite de liquide
SLC 5/03 CPU OUTPUT INPUT
POWER POW ER POW ER
ANALOG ANALOG
AB ALLEN-BRADLEY
Électrovalve
Bassin
Transducteur de niveau
Entrée Analogique
Valve de Sortie
FIGURE 1-2 : C O N T R Ô L E D E N I V E AU
Un bassin doit toujours rester au même niveau peu importe l’ouverture de la vanne de sortie.
Pour ce faire, un transducteur de niveau 0-10V permet de mesurer une plage allant de 0 à 20.000
mètres de hauteur. Ce transducteur est relié à la première entrée analogique de l’automate de la
figure 1-2.
Question #4 - (3 points) Référez-vous au schéma de la figure 1-2.
L’entrée analogique doit être mise à l’échelle afin de convertir la tension à l’entrée de 0 à 10 V
en un code représentatif de 0 à 20000. Réalisez le bout de programme permettant d’effectuer la
conversion. Placez le résultat dans une case mémoire du fichier de nombre entiers.
Question #5 - (3 points) Référez-vous au schéma de la figure 1-2.
La sortie analogique de l’automate contrôle l’ouverture de l’électrovalve par l’entremise d’un
convertisseur de pression. Lorsque le courant est de 4mA, la valve est complètement fermée
tandis qu’un courant de 20 mA ouvre pleinement cette dernière. Quelle sera l’ouverture de la
vanne si le code dans le registre image de sortie est de &H2CAA. (Condidérez que l’électrovalve
réagit linéairement)?
Examen Théorique 1 Page 1-1 OFPPT/TECCART
Évaluation Automates Programmables II
On désire masquer le chiffre moins significatif d’une E15 E12 E11 E8 E7 E4 E3 E0
roue codeuse avant d’effectuer une conversion en
binaire. Les entrées E0 à E15 de la roue codeuse sont
reliées aux entrées correspondantes d’un module TOR 3 5 2 4
16 entrées situées dans l’emplacement 3 d’une base à
7 emplacements. FIGURE 1-3 : R O U E C O D E U S E DCB
Question #6 - (3 points) Référez-vous à la figure 1-3.
Quel est le code situé dans le registre image du module d’entrée TOR si l’emplacement de la
roue codeuse est tel que présenté à la figure 1-3? Donnez votre réponse en valeur décimale.
Question #7 - (3 points) Référez-vous à la figure 1-3.
Réalisez une section de programme afin d’obtenir, dans une des cases mémoires du fichier de
nombres entiers, uniquement les 3 chiffres les plus significatifs du registre image du module
TOR.
Question #8 - (3 points) Référez-vous à la figure 1-4.
Réalisez un GRAFCET auxiliaire permettant de faire entendre l’alarme lorsque le chariot se
déplace en mode manuel. Le timbre sonore de l’alarme doit être court (0.5sec.), mais à
intervalles réguliers. L’espacement entre les sons doit être environ trois fois plus long que le son
même.
+---------╥---------╥--------╥--------╥--------╥---------╥----- +------+
¦ a█ b█ c█ d█ e█ f█ ¦MARCHE¦
¦ ┌-▀-┐ +------+
¦/-/-/-/+/+/+/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/- +------+
¦ +--└▄▄▄┘ ¦ALARME¦
¦ ¦ ║ +------+
¦ ¦ ║ +------+
¦ ¦ ║ ¦ MONT ¦
¦haut¦█/═╤╩╤═ +------+
¦ ¦ ╧ ╧ +------+
¦ ¦ ¦ DESC ¦
¦ ¦ +------+
¦ ¦ +------+
¦ bas+█\ ¦GAUCHE¦
¦ + + + + + + + + +------+
¦ ¦------¦ ¦██████¦ ¦░░░░░░¦ ¦▓▓▓▓▓▓¦ ¦░░░░░░¦ ¦------¦ +------+
¦ 3 ¦------¦ ¦██████¦ ¦▒▒▒▒▒░¦ ¦▓▓▓▓▓▓¦ ¦▒▒▒▒▒░¦ ¦------¦ ¦DROITE¦
+---------▀▀-----+------+-+------+-+------+-+------+------------ +------+
Charger Decaper Rincer Etamer Rincer Décharger +------+
--- --- ¦SERRE ¦
+ a + +-███--+ +-███--+ +-███--+ + N + +------+
¦man s¦ ¦arret ¦ ¦charge¦ ¦ mom ¦ ¦ E + O ¦
+ p + +a-----+ +c-----+ +m-----+ + S +
--- ---
FIGURE 1-4 : S Y S T È M E D E T R AI T E M E N T D E S U R F AC E
Examen Théorique 1 Page 1-2 OFPPT/TECCART
Évaluation Automates Programmables II
Question #9 - (3 points) Référez-vous à la figure 1-4.
Un sous-GRAFCET nommé «BASE» contrôle les allées et venues du chariot-élévateur de la
figure 1-4. Réalisez un GRAFCET auxiliaire permettant de créer un arrêt complet.
Ce dernier doit respecter les directives suivantes:
Peu importe la position de l’automatisme, une pression sur un bouton «a» déplace
immédiatement les pinces en position haute et force le sous-GRAFCET «BASE» à
son étape initiale (X1).
Une fois en position haute, le chariot se déplace au poste de déchargement «posf»,
reste en position haute «haut» et attend une prochaine commande.
Si le bouton «a» n’est plus enfoncé, l’automatisme peut reprendre sa séquence
normale, sinon l’automatisme reste immobile. Généralement, l’opérateur passera en
mode manuel pour replacer l’automatisme en position de départ.
Question #10 - (3 points) Référez-vous aux figure 1-5 et figure 1-6 de l’annexe A.
Modifiez, sur la figure ci-dessous, le GRAFCET principal de la perceuse et ce, dans le but de
créer une séquence pas-à-pas.
Une pression constante sur l’interrupteur «s» empêche l’évolution de la prochaine étape. Par
contre, l’action en cours doit se terminer. Tenez-vous aux règles théoriques de la séquence pas-à-
pas.
< 1 >
│
base ╔═╧═╗ ┌
║ 1 ╟─┤
╚═╤═╝ └
│
1─┼─ go&&(h&&!p)
│
┌─┴─┐ ┌
│ 2 ├─┤
└─┬─┘ └
│
2─┼─ p
│
┌─┴─┐ ┌
│ 3 ├─┤
└─┬─┘ └
│
3─┼─ b
│
┌─┴─┐ ┌
│ 4 ├─┤
└─┬─┘ └
│
4─┼─ c
│
╪══════════════════════════════╤
┌─┴─┐ ┌ ┌─┴─┐ ┌
│ 5 ├─┤ │ 6 ├─┤
└─┬─┘ └ └─┬─┘ └
│ │
7─┼─ h 6─┼─ e
│ │
┌─┴─┐ ┌ ┌─┴─┐ ┌
│ 7 ├─┤ │ 8 ├─┤
└─┬─┘ └ └─┬─┘ └
╪══════════════════════════════╧
│
8─┼─ 1
│
│
< 1 >
Examen Théorique 1 Page 1-3 OFPPT/TECCART
Évaluation Automates Programmables II
Question #11 - (3 points) Référez-vous aux figure 1-5 et figure 1-6 de l’annexe A.
Connaissant le fonctionnement d’un poste de perçage et ayant comme modèle les GRAFCETs
auxiliaires de montée et descente ainsi que celui de dépôt de pièce, complétez l’autre GRAFCET
auxiliaire, en l’occurrence celui pour retirer manuellement la pièce du socle de perçage.
Il s’agit ici d’un mode manuel contrôlé. Vérifiez que toutes les conditions de sécurité sont
respectées avant d’effectuer une action de retrait.
│ │
40─┼─ !m && !h && r && !d 60─┼─ !m && !b && d && p && !r
│ │
┌─┴─┐ ┌───────────┐ ┌─┴─┐ ┌────────────┐
│ 40├─┤MONT;MOTEUR│ │ 60├─┤DESC;MOTEUR;│
└─┬─┘ └───────────┘ └─┬─┘ └────────────┘
│ │
41─┼─ m || h ||r 61─┼─ m||b||d||!p
│ │
│
50─┼─ !m && !p && i &&(h||c) && !o
│
┌─┴─┐ ┌─────┐
│ 50├─┤DEPO;│
└─┬─┘ └─────┘
│
51─┼─ (m||bp||i) && (!h||!c)
│
Examen Théorique 1 Page 1-4 OFPPT/TECCART
Évaluation Automates Programmables II
1.2 Annexe A : GRAFCETs de la perceuse
++
¦¦ h +----------------------------------------+
¦¦ \█-------+¦ POSTE DE COMMANDE D’UNE PERCEUSE ¦
┌─────┐ ¦¦ ¦+----------------------------------------+
¦ +------+ ¦¦ +------+ +------+ +------+
¦ ¦ █ ¦¦ ¦Arret ¦ ¦Go C. ¦ ¦FONCT ¦
¦ +------+ ¦¦ +a-----+ +g-----+ +------+
└─┬─┬─┘ ¦¦ ¦¦
+███+ ¦¦ c ¦¦ +------+ +------+ +------+
X ¦¦ <█-------¦¦ ¦Manuel¦ ¦S Pas¦ ¦ARRET ¦
X ¦¦ ¦¦ +m-----+ +S-----+ +------+
X ¦¦ ¦¦
X ¦¦ b ¦¦ +------+ +------+
¦¦ /█-------¦¦ ¦Un Con¦ ¦ BLOC ¦
¦¦ ¦¦ +u-----+ +------+
¦¦ ¦¦
¦¦ ¦¦ +------+ +------+ +------+ +------+
¦¦ ¦¦ ¦Desc ¦ ¦Remont¦ ¦ MONT ¦ ¦ DESC ¦
¦e +-++-+ ¦¦ +d-----+ +r-----+ +------+ +------+
¦----------╣███████╠-¦ ¦ ¦¦
+█O ╣███████╠O█ p +---------¦¦ +------+ +------+ +------+ +------+
---------------------+----+ ¦¦ ¦P Out ¦ ¦P In ¦ ¦ DEPO ¦ ¦ ENLE ¦
----------------------------+-------¦¦ +o-----+ +i-----+ +------+ +------+
FIGURE 1-5 : C R O Q U I S D E L ' I N S T AL L AT I O N D E L A P E R C E U S E
< 1 >
│ │
base ╔═╧═╗ 90─┼─ p < 10>
║ 1 ║ │ │
╚═╤═╝ ┌─┴─┐ ┌───────────────┐ ╔═╧═╗
│ │ 90├─┤if (X101) LUMB;│ ║100║
1─┼─ go&&(h&&!p) └─┬─┘ └───────────────┘ ╚═╤═╝
│ │ │
┌─┴─┐ ┌─────┐ 91─┼─ h 100─┼─ T/0.5s/X100
│ 2 ├─┤DEPO;│ │ │
└─┬─┘ │LUMB;│ ┌─┴─┐
│ └─────┘ │101│
2─┼─ p └─┬─┘
┌─┴─┐ ┌─────────────┐ │
│ 3 ├─┤DESC; MOTEUR;│ 101─┼─ T/0.5s/X101
└─┬─┘ └─────────────┘ │
│ │
3─┼─ b < 10>
┌─┴─┐ ┌────────────┐ < 3 >
│ 4 ├─┤MONT;MOTEUR;│ │
└─┬─┘ └────────────┘ ╔═╧═╗
│ ║ 30║
4─┼─ c ╚═╤═╝
│ ├─────────────────┐
╪════════════╤ │ │
┌─┴─┐ ┌─────┐┌─┴─┐ ┌─────┐ 30─┼─ m 32─┼─ !m
│ 5 ├─┤MONT;││ 6 ├─┤ENLE;│ │ │
└─┬─┘ └─────┘└─┬─┘ └─────┘ ┌─┴─┐ ┌─┴─┐ ┌───────────────┐
7─┼─ h 6─┼─ e │ 31│ │ 32├─┤F/base:(1); │
┌─┴─┐ ┌─┴─┐ └─┬─┘ └─┬─┘ │if (X100) LUMF;│
│ 7 │ │ 8 │ │ │ └───────────────┘
└─┬─┘ └─┬─┘ 31─┼─ !m 33─┼─ m && h && e
╪════════════╧ │ │
│ ├─────────────────┘
8─┼─ 1 │
│ < 3 >
< 1 >
FIGURE 1-6 : U N E S E C T I O N D U G RAFCET D E L A P E R C E U S E
Examen Théorique 1 Page 1-5 OFPPT/TECCART
Royaume du Maroc
OFFICE DE LA FORMATION PROFESSIONNELLE ET DE LA PROMOTION DU TRAVAIL
2. Dépannage (SLC 500), réseau, choix d’un API et
traduction (GRAFCET-LADDER) marche-arrêt
NOM : ______________________________________________
DATE: _________________ GROUPE : __________________
Question #1 - (3 points) Référez-vous à la figure 2-1.
Nommez trois informations que l’on peut tirer du tableau de la figure 2-1.
adresse donn adresse donn adresse donn adresse donn
O:1 0
O:2 38
O:5 0
O:5.1 -12365
O:5.2 0
O:5.3 106
Appuyer sur une touche pr choisir la Base
O:5.2 =
FIGURE 2-1 : T AB L E AU D E V I S U AL I S AT I O N
Question #2 - (3 points) Référez-vous à la figure 2-2.
À la figure 2-2, que représente les lettres S, Z, V et C . Donnez une explication générale ainsi
que la signification de chaque lettre.
INDICATEUR ARITH S:0 Z:0 V:0 C:0
ETAT PROCESSEUR 00000000 00000000 CODE D'INTERRUPTION 0
ETAT PROCESSEUR 00000000 10000001 FICHIER INTERROMPU 0
ETAT PROCESSEUR 10010000 00000010
CHIEN de GARDE [x10 ms]: 10
FAUTE MINEURE 01000000 00000000 DERN SCRUTAT [x10 ms]: 1
CODE FAUTE 0000 HORLOGE NON ASSERVIE 00110110 00101100
DESCRIPTION FAUTE:
REGISTRE MATH 0000 0000
STATIONS ACTIVES (CANAL 1) ACTIVE EMPLAC E/S
0 10 20 30 0 10 20 30
11000000 00000000 00000000 00000000 11111111 11111111 11111111 11111111
VITESSE PROCESSEUR (CANAL 1) 19200 ADRESSE PROCESEUR (CANAL 1) 1
Appuyer sur une Touche Fonction
S:0/0 =
FIGURE 2-2
Examen Théorique 2 Cours 11A OFPPT/TECCART
Évaluation Automates Programmables II
Question #3 - (3 points). Au moment où la figure 2-3 a été enregistrée, quelle était la valeur
cumulée par le temporisateur T4 :3.
adresse EN TT DN BASE PRE ACC
T4:0 0 0 0 0,01 sec. 0 0
T4:1 0 0 0 1,0 sec. 1800 1600
T4:2 0 0 0 0,01 sec. 0 0
T4:3 0 0 0 0,01 sec. 750 450
T4:4 0 0 0 0,01 sec. 500 55
T4:5 0 0 0 0,01 sec. 120 62
T4:6 0 0 0 1,0 sec. 53 20
Appuyer sur une touche ou entrer une valeur
T4:0.ACC =
FIGURE 2-3
Question #4 - (3 points). La figure 2-4 représente les valeurs juste avant une action de forçage.
Est-il possible de connaître, par les seules informations présentent à la figure 2-4, la valeur
présente a l’entrée I :7.0. Expliquez votre réponse.
adresse 15 donn 0 adresse 15 donn 0
I:2 .... .... .... ....
I:4 .... .... .... ....
I:7 .... ..0. ..1. ....
I:7.1 .... .... .... ....
I:7.2 0000 1111 1111 1111
I:7.3 .... .... .... ....
Appuyer sur une touche ou Entrer une valeur de forçage
I:2/0 =
FIGURE 2-4
Question #5 - (2 points). Nommez quatre manufacturiers d’API.
Question #6 - (2 points). Les logiciels de supervision font partie de la couche _________ du
standard OSI tandis que les modules de liaisons font référence à la couche _______________.
a) supervision, liaison
b) application, transport
c) présentation, liaison
d) supervision, réseau
e) application, physique
f) application, liaison
g) session, physique
Question #7 - (2 points). Nommez quatre critères primaires lorsqu’il viens le temps de choisir
un API pour un projet donné.
Examen Théorique 2 Page 2-1 OFPPT/TECCART
Évaluation Automates Programmables II
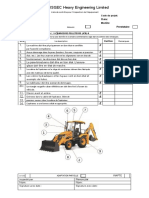
Question #8 - (3 points). Remplissez le tableau 2-1 au meilleure de vos connaissances. Cochez
aux endroits appropriés et indiquez le nombre possible aux autres emplacements disponibles.
2- 1 : D E S C R I P T I O N D ’ U N API SLC 500
T AB L E AU
Marque ALLEN-BRADLEY Modèle SLC 500 ( 5/03)
Constitution : Langage de programmation
Modulaire ; LADDER et blocs de fonctions
Monobloc ; liste d’instruction
# Entrées/sorties : logigramme ;
discrètes (tout-ou-rien) ; GRAFCET.
analogiques ; Jeu d’instructions
déportées. Nombre d’instructions
Capacité mémoire en kmots : nombre de sous-programmes
programme ; BCD/DCB
mots de données ; Console de programmation
bits internes ; De poche
temporisateur / compteur. Moniteur portable
Type mémoire programme : PC ou compatible
RAM RAM nécessaire
EEPROM interfaces
Fonctions internes : systèmes d’exploitation
Modification en mode RUN ; Réseau
horloge en temps réel ; Marques
calendrier ; capacité d’adressage
configuration logicielle ; protocole
interruption ; topologie
sous-programme ; norme
accès par mot de passe. Vitesse de transmission
Diagnostic Média
par DEL sur l’UC ; Distance de liaisons
bits de diagnostic du système ; Commercialisation
table de diagnostic. Date
Cartes intelligentes : Pays d’origine
axe ; Documentation
comptage rapide ; Divers (inscrire)
communication série ;
réseau ;
analogiques ;
régulateur PID ;
Examen Théorique 2 Page 2-2 OFPPT/TECCART
Évaluation Automates Programmables II
Les trois dernières questions se rapportent à la figure 2-5, au tableau 2-2 et l’annexe A.
+---------╥---------╥--------╥--------╥--------╥---------╥----- +------+
¦ a█ b█ c█ d█ e█ f█ ¦MARCHE¦
¦ ┌-▀-┐ +------+
¦/-/-/-/+/+/+/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/-/- +------+
¦ +--└▄▄▄┘ ¦ALARME¦
¦ ¦ ║ +------+
¦ ¦ ║ +------+
¦ ¦ ║ ¦ MONT ¦
¦haut¦█/═╤╩╤═ +------+
¦ ¦ ╧ ╧ +------+
¦ ¦ ¦ DESC ¦
¦ ¦ +------+
¦ ¦ +------+
¦ bas+█\ ¦GAUCHE¦
¦ + + + + + + + + +------+
¦ ¦------¦ ¦██████¦ ¦░░░░░░¦ ¦▓▓▓▓▓▓¦ ¦░░░░░░¦ ¦------¦ +------+
¦ 3 ¦------¦ ¦██████¦ ¦▒▒▒▒▒░¦ ¦▓▓▓▓▓▓¦ ¦▒▒▒▒▒░¦ ¦------¦ ¦DROITE¦
+---------▀▀-----+------+-+------+-+------+-+------+------------ +------+
Charger Decaper Rincer Etamer Rincer Décharger +------+
--- --- ¦SERRE ¦
+ a + +-███--+ +-███--+ +-███--+ + N + +------+
¦man s¦ ¦arret ¦ ¦charge¦ ¦ mom ¦ ¦ E + O ¦
+ p + +a-----+ +c-----+ +m-----+ + S +
--- ---
F I G U R E 2-5 : C R O Q U I S D E L ' I N S T AL L AT I O N
T AB L E AU 2-2 : A U T O M AT I S M E D U “T R AI T E M E N T D E S U R F AC E ”
ENT RÉES
GRAFCET (@TRAITE.IO) FONCTION AUTOMATE
Étiquette Simulation Adresse N.O. N.F. Étiquette
man (souris) h* (clavier) Sélecteur en fonction manuel. man
aut (souris) i (clavier) Sélecteur en fonction automatique. aut
sem (souris) j (clavier) Sélecteur en fonction semi-automatique. sem
pas (souris) k (clavier) Sélecteur en fonction pas-à-pas. pas
charge c Bouton de chargement des plaques charge
mom m Bouton d’arrêt momentané mom
bas Interrupteur de limite bas bas
haut Interrupteur de limite haut haut
det Détection plaques au chargement det
posa Poste de chargement posa
posb Poste de décapage posb
posc Poste de rinçage #1 posc
posd Poste d’étamage posc
pose Poste de rinçage #2 posc
posf Poste de déchargement posc
nors n nord
sud s Interrupteur multi-positions sud
est e est
ouest o ouest
SORTIES
Étiquette / Simulation Adresse C.C. C.A. Étiquette
MARCHE Lumière de fonctionnement en marche 24 MARCHE
GAUCHE Déplacement gauche (vers l’ouest) 220 GAUCHE
DROITE Déplacement droite (vers l’est) 220 DROITE
MONT Déplacement monte 220 MONTE
DESC Déplacement descend 220 DESCEND
ALARM Alarme de danger 24 ALARME
SERRE Pince de serrage 220 SERRE
*
Les lettres h, i, j, k permettent de simuler le sélecteur rotatif. N’appuyez jamais plus d’une touche à la fois.
Examen Théorique 2 Page 2-3 OFPPT/TECCART
Évaluation Automates Programmables II
Annexe A : GRAFCET de l’automatisme de traitement de surface
FIGURE 2-6: G RAFCET P R I N C I P AL (P AR T I E L ) FIGURE 2-7 : G RAFCET D E L ' ALARM E;
< 2 > < 3 >
│ ╔═╧═╗ ┌───────────────────┐
BASE ╔═╧═╗ ║ 50╟─┤if (m&&X61) ALARME;│
║ 1 ║ ╚═╤═╝ │if (a&&!m) ALARME; │
╚═╤═╝ ┌────────────┘ │ │
< 1 > 1─┼─ det && c │ └───────────────────┘
└────────────┤ 62─┼─ man&&!m&&!a
┌─┴─┐ ┌──────────────────┐ ┌─┴─┐ ┌──────────────────────────────┐
│ 2 ├─┤if(!m&&!bas) DESC;│ │ 62├─┤if ((n||s||e||o)&&X71) ALARME;│
└─┬─┘ └──────────────────┘ └─┬─┘ └──────────────────────────────┘
2─┼─ bas && !pas 63─┼─ !man||a||m
│ └────────────┐
< 3 >
FIGURE 2-8: G RAFCET M ANUEL
┌────────────┐
│ ╔═╧═╗
│ ║ 80║
│ ╚═╤═╝
│ 81─┼─ man
│ ┌─┴─┐ ┌──────────────────────────────────────────────┐
│ │ 82├─┤F/BASE:(1);if (posa && bas && c) SERRE=1; │
│ └─┬─┘ │ if (posf && bas && c) SERRE=0; │
│ │ │ │
│ 82─┼─ !man────────────────────────────────────────────┘
└────────────┘
FIGURE 2-9 :G RAFCET D É P L AC E M E N T S M AN U E L S
< 4 > < 7 >
╔═╧═╗ ╔═╧═╗
║ 90║ ║301║
╚═╤═╝ ╚═╤═╝
90─┼─ man&&e&&!posf&&!(SERRE&&!haut)&&!bas 300─┼─ man&&n&&!haut
┌─┴─┐ ┌───────┐ ┌─┴─┐ ┌─────┐
│ 91├─┤DROITE;│ │300├─┤MONT;│
└─┬─┘ └───────┘ └─┬─┘ └─────┘
91─┼─ !man||!e||posf||bas 301─┼─ !man||!n||haut
│ │
< 4 > < 7 >
< 5 > < 6 >
╔═╧═╗ ╔═╧═╗
║101║ ║201║
╚═╤═╝ ╚═╤═╝
100─┼─ man&&o&&!posa&&!(SERRE&&!haut)&&!bas 200─┼─man&&s&&!bas&&!(SERRE&&posa)
┌─┴─┐ ┌───────┐ ┌─┴─┐ ┌─────┐
│100├─┤GAUCHE;│ │200├─┤DESC;│
└─┬─┘ └───────┘ └─┬─┘ └─────┘
101─┼─ !man||!o||posa||bas 201─┼─ !man||!s||bas
│ │
< 5 > < 6 >
FIGURE 2-10 : T E M P O R I S AT E U R S FIGURE 2-11 : L U M M ARCHE;
┌───────────┐ ┌─────────────┐ ┌────────────┐
╔═╧═╗ │ ╔═╧═╗ │ ╔═╧═╗ │ ╔═╧═╗ ┌─────────────────────
║ 60║ │ ║ 70║ │ ║ 30║ │ ║ 20╟─┤if (aut) MARCHE;
╚═╤═╝ │ ╚═╤═╝ │ ╚═╤═╝ │ ╚═╤═╝ │if (sem && X30) MARCHE;
60─┼─ T/1s/X60 │ 70─┼─ T/0.5s/X70 │ 30─┼─ T/1.5s/X30│ │ │if (pas && X31) MARCHE;
┌─┴─┐ │ ┌─┴─┐ │ ┌─┴─┐ ||man │ │if (man && X32) MARCHE;
│ 61│ │ │ 71│ │ │ 31│ │ └─────────────────────
└─┬─┘ │ └─┬─┘ │ └─┬─┘ │
61─┼─ T/1s/X61 │ 71─┼─ T/0.2s/X71 │ 31─┼─ T/0.25s/X31
└───────────┘ └─────────────┘ ┌─┴─┐ │
│ 32│ │
└─┬─┘ │
32─┼─ T/0.25s/X32
└────────────┘
Examen Théorique 2 Page 2-4 OFPPT/TECCART
Évaluation Automates Programmables II
FIGURE 2-12 : G RAFCET D ' ARRÊT
┌────────────┐
│ ╔═╧═╗
│ ║ 40║
│ ╚═╤═╝
│ 40─┼─ a
│ ┌─┴─┐ ┌───────────┐
│ │ 41├─┤F/BASE:(1);│
│ └─┬─┘ └───────────┘
│ ├─────────────────────────┐
│ 41─┼─ SERRE 42─┼─ !SERRE
│ ┌─┴─┐ ┌───────────┐ │
│ │ 46├─┤if(!m)MONT;│ │
│ └─┬─┘ └───────────┘ │
│ 46─┼─ haut │
│ ┌─┴─┐ ┌─────────────┐ │
│ │ 47├─┤if(!m)DROITE;│ │
│ └─┬─┘ └─────────────┘ │
│ 47─┼─ posf │
│ ┌─┴─┐ ┌───────────┐ │
│ │ 48├─┤if(!m)DESC;│ │
│ └─┬─┘ └───────────┘ │
│ 48─┼─ bas │
│ ├─────────────────────────┘
│ ┌─┴─┐ ┌────────┐
│ │ 49├─┤SERRE=0;│
│ └─┬─┘ └────────┘
│ 49─┼─ !SERRE
│ ╪═════════════════════════╤
│ ┌─┴─┐ ┌───────────┐ ┌─┴─┐ ┌─────────────┐
│ │ 42├─┤if(!m)MONT;│ │ 43├─┤if(!m)GAUCHE;│
│ └─┬─┘ └───────────┘ └─┬─┘ └─────────────┘
│ 43─┼─ haut 44─┼─ posa
│ ┌─┴─┐ ┌─┴─┐
│ │ 45│ │ 44│
│ └─┬─┘ └─┬─┘
│ ╪═════════════════════════╧
│ 45─┼─ !a
└────────────┘
Question #9 - (3 points) En vous rapportant au croquis de la figure 2-5, au tableau 2-2 et à
l’annexe A, expliquez, en vos mots et spécifiquement pour l’exemple du traitement de surface,
les étapes à suivre afin de traduire le mode manuel.
Question #10 - (3 points) En vous rapportant au croquis de la figure 2-5, au tableau 2-2 et à
l’annexe A, expliquez, en vos mots et spécifiquement pour l’exemple du traitement de surface,
les étapes à suivre pour traduire l’arrêt complet.
Question #11 - (3 points) Règle générale, comment fait-on pour exécuter simplement la
traduction d’un arrêt momentané.
Examen Théorique 2 Page 2-5 OFPPT/TECCART
Royaume du Maroc
OFFICE DE LA FORMATION PROFESSIONNELLE ET DE LA PROMOTION DU TRAVAIL
Cours 11A
Automates Programmables II
Corrigé
Deuxième Année
Programme de Formation des Techniciens
Spécialisés en Électronique
DIRECTION DE LA RECHERCHE ET INGENIERIE DE LA FORMATION
Septembre 1996
Corrigé Automates Programmables II
TECCART INTERNATIONAL 2000 inc.
3155, boul. Hochelaga,
Montréal, Québec (Canada)
H1W 1G4
RÉDACTION
Pierre Asselin
DESSINS ET CONCEPTION GRAPHIQUE
Pierre Asselin & Rémi Gaudreau
RÉVISION TECHNIQUE
Pierre Asselin
RÉVISION LINGUISTIQUE
François Gaudreau
Les droits de reproduction et de diffusion de ce document sont cédés par Teccart
International 2000 inc. à l’Office de la Formation Professionnelle et de la Promotion du
Travail du Royaume du Maroc, pour sa propre utilisation au Maroc.
Mis à part l’OFPPT, toute reproduction, en tout ou en partie, par quelque procédé que ce
soit, est interdite.
Imprimé à Montréal, le 12 June 2023
Cor_11a / 43 pages
Corrigé Page 1-2 OFPPT/TECCART
Corrigé Automates Programmables II
TABLE DES MATIÈRES
1. RÉSUMÉ DE THÉORIE 1-4
1.1 RT1 .....................................................................................................................................................................1-4
1.2 RT2 .....................................................................................................................................................................1-4
1.3 RT3 .....................................................................................................................................................................1-4
1.4 RT4 .....................................................................................................................................................................1-4
1.5 RT5 .....................................................................................................................................................................1-4
1.6 RT6 .....................................................................................................................................................................1-4
1.7 RT7 .....................................................................................................................................................................1-4
2. TRAVAUX PRATIQUES 2-5
2.1 TP1 : Traitement analogique............................................................................................................................2-5
2.2 TP2 : Utilisation de l’instruction PID ..............................................................................................................2-9
2.3 TP3 : Traitement de surface ...........................................................................................................................2-10
2.4 TP4 : Ascenseur (GRAFCET-LADDER) ......................................................................................................2-15
2.5 TP5 : Outils de dépannage..............................................................................................................................2-27
2.6 TP6 : Choix d’un API......................................................................................................................................2-27
3. ÉVALUATIONS 3-36
3.1 Examen théorique #1.......................................................................................................................................3-36
3.2 Examen Théorique #2......................................................................................................................................3-40
3.3 Examen Pratique #1 ........................................................................................................................................3-42
4. QUESTIONNAIRES PÉRIODIQUES 4-43
4.1 Questionnaire Périodique (TP1 & TP2) ........................................................................................................4-43
4.2 Questionnaire Périodique (TP3 & TP4) ........................................................................................................4-43
4.3 Questionnaire Périodique (TP5 & TP6) ........................................................................................................4-43
Corrigé Page 1-3 OFPPT/TECCART
Corrigé Automates Programmables II
1. Résumé de théorie
1.1 RT1
1.2 RT2
1.3 RT3
1.4 RT4
1.5 RT5
1.6 RT6
1.7 RT7
Corrigé Page 1-4 OFPPT/TECCART
Corrigé Automates Programmables II
2. Travaux Pratiques
2.1 TP1 : Traitement analogique
T AB L E AU 2-1 : E X E M P L E D ’ U N E S O R T I E AN AL O G I Q U E ± 10V
Code 16 bits Valeur décimale Valeurs théoriques Valeurs Pratiques
4,5,6,7 1.2207 mV 1.2 mV
128,129,130,131 39.1 mV
0100 0000 0000 00xx 16384, 16385,
16386, 16387
1100 0000 0000 00xx -16384, ...
0100 1110 0010 00xx 6.1 V +6.12V
-1 -1.2207 mV -1.2 mV
32 767 +9.9996 V +10V
23 135 7.06V +7.1V
-2.95V
MINI-INTERRUPTEURS TENSION COURANT
1 0 :7.0
2 0 :7.1
3 0 :7.2
4 0 :7.3
T AB L E AU 2-1 : E X E M P L E D ’ U N E E N T R É E AN AL O G I Q U E 4-20 M A
Entrée 4-20mA Code 16 bits Code Hexa Code décimal Température °C
$0CCC 3276
12 mA 0010 0110 0110 0110 $2666 9830
5 mA $1000 4096 12.5 °C
14 mA 0010 1100 1100 1100 $2CCC 35 °C
0001 1001 1001 1001 $1999 6553 20 °C
16 mA 0011 0011 0011 0011 13 107 40 °C
0100 0000 0000 0000 $4000 16 384
Corrigé Page 2-5 OFPPT/TECCART
Corrigé Automates Programmables II
AP2_TP1A / Programme des trois lumières (Temp °C) Mai 24, 1996 Page 1
Listing Programme Fichier Processeur: AP2_TP1A.ACH Ligne 2:0
Ligne 2:0
║ ┌LES───────────────┐ O:3 ║
╟─┤INFERIEUR A ├────────────────────────────────────────────────────( )──╢
║ │Source A I:7.3│ 1 ║
║ │ 0│ ║
║ │Source B 6553│ ║
║ │ │ ║
║ └──────────────────┘ ║
Ligne 2:1
║ ┌GRT───────────────┐ B3 ║
╟─┤PLUS GRAND QUE ├────────────────────────────────────────────────────( )──╢
║ │Source A I:7.3│ 1 ║
║ │ 0│ ║
║ │Source B 8192│ ║
║ │ │ ║
║ └──────────────────┘ ║
Ligne 2:2
║ ┌LES───────────────┐ B3 ║
╟─┤INFERIEUR A ├────────────────────────────────────────────────────( )──╢
║ │Source A I:7.3│ 2 ║
║ │ 0│ ║
║ │Source B 11468│ ║
║ │ │ ║
║ └──────────────────┘ ║
Ligne 2:3
║ B3 B3 O:3 ║
╟──] [───] [──────────────────────────────────────────────────────────────( )──╢
║ 1 2 2 ║
Ligne 2:4
║ ┌GRT───────────────┐ O:3 ║
╟─┤PLUS GRAND QUE ├────────────────────────────────────────────────────( )──╢
║ │Source A I:7.3│ 3 ║
║ │ 0│ ║
║ │Source B 13107│ ║
║ │ │ ║
║ └──────────────────┘ ║
Ligne 2:5
║ ║
╟─────────────────────────────────────┤END├────────────────────────────────────╢
║ ║
AP2_TP1B / Mise à l'échelle (Degrés Celcius) Mai 24, 1996 Page 1
Listing Programme Fichier Processeur: AP2_TP1B.ACH Ligne 2:0
Ligne 2:0
║ ┌LES───────────────┐ O:3 ║
╟─┤INFERIEUR A ├────────────────────────────────────────────────────( )──╢
║ │Source A I:7.3│ 1 ║
║ │ 5051│ ║
║ │Source B 6553│ ║
║ │ │ ║
║ └──────────────────┘ ║
Ligne 2:1
║ ┌GRT───────────────┐ B3 ║
╟─┤PLUS GRAND QUE ├────────────────────────────────────────────────────( )──╢
║ │Source A I:7.3│ 1 ║
║ │ 5051│ ║
║ │Source B 8192│ ║
║ │ │ ║
║ └──────────────────┘ ║
Corrigé Page 2-6 OFPPT/TECCART
Corrigé Automates Programmables II
Ligne 2:2
║ ┌LES───────────────┐ B3 ║
╟─┤INFERIEUR A ├────────────────────────────────────────────────────( )──╢
║ │Source A I:7.3│ 2 ║
║ │ 5051│ ║
║ │Source B 11468│ ║
║ │ │ ║
║ └──────────────────┘ ║
Ligne 2:3
║ B3 B3 O:3 ║
╟──] [───] [──────────────────────────────────────────────────────────────( )──╢
║ 1 2 2 ║
Ligne 2:4
║ ┌GRT───────────────┐ O:3 ║
╟─┤PLUS GRAND QUE ├────────────────────────────────────────────────────( )──╢
║ │Source A I:7.3│ 3 ║
║ │ 5051│ ║
║ │Source B 13107│ ║
║ │ │ ║
║ └──────────────────┘ ║
Ligne 2:5
║ I:2 ┌MOV───────────────┐ ║
╟──]/[────────────────────────────────────────────────────┤TRANSFERT ├─╢
║ 1 │Source I:7.3│ ║
║ │ 5051│ ║
║ │Dest O:6.3│ ║
║ │ 13302│ ║
║ └──────────────────┘ ║
AP2_TP1B / Mise à l'échelle (Degrés Celcius) Mai 24, 1996 Page 2
Listing Programme Fichier Processeur: AP2_TP1B.ACH Ligne 2:6
Ligne 2:6
║ I:2 ┌DIV───────────────┐ ║
╟──] [────────────────────────────────────────────────────┤DIVISION ├─╢
║ 1 │Source A I:7.3│ ║
║ │ 5051│ ║
║ │Source B 9│ ║
║ │ │ ║
║ │Dest N7:1│ ║
║ │ 561│ ║
║ └──────────────────┘ ║
Ligne 2:7
║ I:2 ┌MUL───────────────┐ ║
╟──] [────────────────────────────────────────────────────┤MULTIPLICATION ├─╢
║ 1 │Source A N7:1│ ║
║ │ 561│ ║
║ │Source B 5│ ║
║ │ │ ║
║ │Dest N7:2│ ║
║ │ 2805│ ║
║ └──────────────────┘ ║
Ligne 2:8
║ I:2 ┌ADD───────────────┐ ║
╟──] [────────────────────────────────────────────────────┤ADD ├─╢
║ 1 │Source A N7:2│ ║
║ │ 2805│ ║
║ │Source B 10497│ ║
║ │ │ ║
║ │Dest O:6.3│ ║
║ │ 13302│ ║
║ └──────────────────┘ ║
Ligne 2:9
║ ║
╟─────────────────────────────────────┤END├────────────────────────────────────╢
║ ║
Corrigé Page 2-7 OFPPT/TECCART
Corrigé Automates Programmables II
AP2_TP1C / Mise à l'échelle (Degrés Fahrenheit) Mai 24, 1996 Page 1
Listing Programme Fichier Processeur: AP2_TP1C.ACH Ligne 2:0
Ligne 2:0
║ I:2 I:2 ┌MOV───────────────┐ ║
╟──]/[───]/[──────────────────────────────────────────────┤TRANSFERT ├─╢
║ 1 2 │Source 0│ ║
║ │ │ ║
║ │Dest O:6.3│ ║
║ │ 0│ ║
║ └──────────────────┘ ║
Ligne 2:1
║ I:2 I:2 ┌MOV───────────────┐ ║
╟──] [───]/[──────────────────────────────────────────────┤TRANSFERT ├─╢
║ 1 2 │Source 16384│ ║
║ │ │ ║
║ │Dest O:6.3│ ║
║ │ 0│ ║
║ └──────────────────┘ ║
Ligne 2:2
║ I:2 I:2 ┌MOV───────────────┐ ║
╟──]/[───] [──────────────────────────────────────────────┤TRANSFERT ├─╢
║ 1 2 │Source -16384│ ║
║ │ │ ║
║ │Dest O:6.3│ ║
║ │ 0│ ║
║ └──────────────────┘ ║
Ligne 2:3
║ I:2 I:2 T4:2 ┌TON───────────────┐ ║
╟──] [───] [───]/[───────────────────────────────────┤TEMPO AU TRAVAIL ├─(EN)─╢
║ 1 2 DN │Temporisation T4:1├─(DN) ║
║ │Base de Temps 1.0│ ║
║ │Présélection 2│ ║
║ │Val. Cumulée 0│ ║
║ └──────────────────┘ ║
Ligne 2:4
║ T4:1 T4:2 ┌TON───────────────┐ ║
╟──] [───]/[─────────────────────────────────────────┤TEMPO AU TRAVAIL ├─(EN)─╢
║ DN DN │Temporisation T4:2├─(DN) ║
║ │Base de Temps 1.0│ ║
║ │Présélection 2│ ║
║ │Val. Cumulée 0│ ║
║ └──────────────────┘ ║
Ligne 2:5
║ T4:1 I:2 I:2 ┌MOV───────────────┐ ║
╟──] [───] [───] [────────────────────────────────────────┤TRANSFERT ├─╢
║ DN 1 2 │Source 32767│ ║
║ │ │ ║
║ │Dest O:6.3│ ║
║ │ 0│ ║
║ └──────────────────┘ ║
AP2_TP1C / Mise à l'échelle (Degrés Fahrenheit) Mai 24, 1996 Page 2
Listing Programme Fichier Processeur: AP2_TP1C.ACH Ligne 2:6
Ligne 2:6
║ T4:1 I:2 I:2 ┌MOV───────────────┐ ║
╟──]/[───] [───] [────────────────────────────────────────┤TRANSFERT ├─╢
║ DN 1 2 │Source -32768│ ║
║ │ │ ║
║ │Dest O:6.3│ ║
║ │ 0│ ║
║ └──────────────────┘ ║
Ligne 2:7
║ ║
╟─────────────────────────────────────┤END├────────────────────────────────────╢
Corrigé Page 2-8 OFPPT/TECCART
Corrigé Automates Programmables II
2.2 TP2 : Utilisation de l’instruction PID
AP2_TP2A / Instruction PID Mai 24, 1996 Page 1
Listing Programme Fichier Processeur: AP2_TP2A.ACH Ligne 2:0
Ligne 2:0
║ ┌PID─────────────────────────┐ ║
╟───────────────────────────────────────────────┤PID ├─╢
║ │Bloc de Contrôle N7:1│ ║
║ │Variable de Procédé I:7.3│ ║
║ │Variable de Contrôle O:6.3│ ║
║ │Longu. Bloc Contrôle 23│ ║
║ └────────────────────────────┘ ║
Ligne 2:1
║ ║
╟─────────────────────────────────────┤END├────────────────────────────────────╢
║ ║
Corrigé Page 2-9 OFPPT/TECCART
Corrigé Automates Programmables II
2.3 TP3 : Traitement de surface
@TRAITE1.GF7
Traitement de surface (Initial)
24 mai 1996
Programmation , Page : 1
< 2 >
│
BASE ╔═╧═╗
║ 1 ║
╚═╤═╝
│
< 1 > 1─┼─ det && c
│ │
└────────────┤
┌─┴─┐ ┌─────┐
│ 2 ├─┤DESC;│
└─┬─┘ └─────┘
│
2─┼─ bas
┌────────────┤
│ ┌─┴─┐ ┌─────────────┐
│ │ 3 ├─┤SERRE=1;MONT;│
│ └─┬─┘ └─────────────┘
│ │
│ 3─┼─ haut
│ ┌─┴─┐ ┌───────┐
│ │ 4 ├─┤DROITE;│
│ └─┬─┘ └───────┘
│ │
│ 4─┼─ (posb||posc||posd||pose||posf)
│ │
│ ┌─┴─┐ ┌───────────────────────────┐
│ │ 10├─┤//ajout obligatoire pour la│
│ └─┬─┘ │//sequence pas-a-pas │
│ │ └───────────────────────────┘
│ 10─┼─ 1
│ ┌─┴─┐ ┌─────┐
│ │ 5 ├─┤DESC;│
│ └─┬─┘ └─────┘
│ │
│ 5─┼─ bas
│ │
│ ┌─┴─┐
│ │ 6 │
│ └─┬─┘
│ ├─────────────────────────┐
│ │ │
│ 6─┼─ (((posb&&T/1s/X6)|| 7─┼─ posf
│ │ (posc&&T/4s/X6)|| │
└────────────┘ (posd&&T/3s/X6)|| │
(pose&&T/2s/X6))&& ┌─┴─┐ ┌────────┐
!pas)||n │ 7 ├─┤MONT; │
└─┬─┘ │SERRE=0;│
│ └────────┘
8─┼─ haut
│
┌─┴─┐ ┌───────┐
│ 8 ├─┤GAUCHE;│
└─┬─┘ └───────┘
│
11─┼─ posa
│
┌─┴─┐
│ 9 │
└─┬─┘
│
9─┼─ det && c
│
< 1 >
Corrigé Page 2-10 OFPPT/TECCART
Corrigé Automates Programmables II
@TRAITE2.GF7
Traitement de surface
24 mai 1996
Programmation , Page : 1
< 2 >
│
BASE ╔═╧═╗
║ 1 ║
╚═╤═╝
│
< 1 > 1─┼─ det && c
│ │
└────────────┤
┌─┴─┐ ┌──────────────────┐
│ 2 ├─┤if(!m&&!bas) DESC;│
└─┬─┘ └──────────────────┘
│
2─┼─ bas && !pas
│
┌────────────┤
│ ┌─┴─┐ ┌────────────────────────────┐
│ │ 3 ├─┤SERRE=1;if (!m&&!haut) MONT;│
│ └─┬─┘ └────────────────────────────┘
│ │
│ 3─┼─ haut && !pas
│ │
│ ┌─┴─┐ ┌──────────────┐
│ │ 4 ├─┤if(!m) DROITE;│
│ └─┬─┘ └──────────────┘
│ │
│ 4─┼─ (posb||posc||posd||pose||posf)
│ │
│ ┌─┴─┐ ┌───────────────────────────┐
│ │ 10├─┤//ajout obligatoire pour la│
│ └─┬─┘ │//sequence pas-a-pas │
│ │ └───────────────────────────┘
│ 10─┼─ !pas
│ │
│ ┌─┴─┐ ┌───────────────────┐
│ │ 5 ├─┤if (!m&&!bas) DESC;│
│ └─┬─┘ └───────────────────┘
│ │
│ 5─┼─ bas && !pas
│ │
│ ┌─┴─┐
│ │ 6 │
│ └─┬─┘
│ ├─────────────────────────┐
│ │ │
│ 6─┼─ (((posb&&T/1s/X6)|| 7─┼─ posf && !pas
│ │ (posc&&T/4s/X6)|| │
└────────────┘ (posd&&T/3s/X6)|| │
(pose&&T/2s/X6))&& ┌─┴─┐ ┌────────────────────┐
!pas)||n │ 7 ├─┤if (!m&&!haut) MONT;│
└─┬─┘ │SERRE=0; │
│ └────────────────────┘
8─┼─ haut && !pas
│
┌─┴─┐ ┌──────────────────────┐
│ 8 ├─┤if (!m&&!posa) GAUCHE;│
└─┬─┘ └──────────────────────┘
│
11─┼─ posa && !pas
│
┌─┴─┐
│ 9 │
└─┬─┘
│
9─┼─ det && (aut
│ ||(sem && c))
│
< 1 >
┌────────────┐
Corrigé Page 2-11 OFPPT/TECCART
Corrigé Automates Programmables II
╔═╧═╗ ┌────────────────────────┐ ╔═╧═╗ │
║ 20╟─┤if (aut) MARCHE; │ ║ 30║ │
╚═╤═╝ │if (sem && X30) MARCHE; │ ╚═╤═╝ │
│if (pas && X31) MARCHE; │ │ │
│if (man && X32) MARCHE; │ 30─┼─ T/1.5s/X30||man
└────────────────────────┘ │ │
┌─┴─┐ │
│ 31│ │
└─┬─┘ │
│ │
31─┼─ T/0.25s/X31
│ │
┌─┴─┐ │
│ 32│ │
└─┬─┘ │
│ │
32─┼─ T/0.25s/X32
│ │
└────────────┘
┌────────────┐
│ ╔═╧═╗
│ ║ 40║
│ ╚═╤═╝
│ │
│ 40─┼─ a
│ │
│ ┌─┴─┐ ┌───────────┐
│ │ 41├─┤F/BASE:(1);│
│ └─┬─┘ └───────────┘
│ ├─────────────────────────┐
│ │ │
│ 41─┼─ SERRE 42─┼─ !SERRE
│ │ │
│ ┌─┴─┐ ┌───────────┐ │
│ │ 46├─┤if(!m)MONT;│ │
│ └─┬─┘ └───────────┘ │
│ │ │
│ 46─┼─ haut │
│ │ │
│ ┌─┴─┐ ┌─────────────┐ │
│ │ 47├─┤if(!m)DROITE;│ │
│ └─┬─┘ └─────────────┘ │
│ │ │
│ 47─┼─ posf │
│ │ │
│ ┌─┴─┐ ┌───────────┐ │
│ │ 48├─┤if(!m)DESC;│ │
│ └─┬─┘ └───────────┘ │
│ │ │
│ 48─┼─ bas │
│ │ │
│ ├─────────────────────────┘
│ ┌─┴─┐ ┌────────┐
│ │ 49├─┤SERRE=0;│
│ └─┬─┘ └────────┘
│ │
│ 49─┼─ !SERRE
│ │
│ ╪═════════════════════════╤
│ ┌─┴─┐ ┌───────────┐ ┌─┴─┐ ┌─────────────┐
│ │ 42├─┤if(!m)MONT;│ │ 43├─┤if(!m)GAUCHE;│
│ └─┬─┘ └───────────┘ └─┬─┘ └─────────────┘
│ │ │
│ 43─┼─ haut 44─┼─ posa
│ │ │
│ ┌─┴─┐ ┌─┴─┐
│ │ 45│ │ 44│
│ └─┬─┘ └─┬─┘
│ ╪═════════════════════════╧
│ │
│ 45─┼─ !a
│ │
└────────────┘
Corrigé Page 2-12 OFPPT/TECCART
Corrigé Automates Programmables II
< 3 >
│
╔═╧═╗ ┌───────────────────┐
║ 50╟─┤if (m&&X61) ALARME;│
╚═╤═╝ │if (a&&!m) ALARME; │
┌────────────┘ │ │
│ └───────────────────┘
62─┼─ man&&!m&&!a
│
┌─┴─┐ ┌──────────────────────────────┐
│ 62├─┤if ((n||s||e||o)&&X71) ALARME;│
└─┬─┘ └──────────────────────────────┘
│
63─┼─ !man||a||m
│
└────────────┐
│
< 3 >
┌─────────────────────────┐
╔═╧═╗ │
║ 60║ │
╚═╤═╝ │
│ │
60─┼─ T/1s/X60 │
│ │
┌─┴─┐ │
│ 61│ │
└─┬─┘ │
│ │
61─┼─ T/1s/X61 │
│ │
└─────────────────────────┘
┌─────────────────────────┐
╔═╧═╗ │
║ 70║ │
╚═╤═╝ │
│ │
70─┼─ T/0.5s/X70 │
│ │
┌─┴─┐ │
│ 71│ │
└─┬─┘ │
│ │
71─┼─ T/0.2s/X71 │
│ │
└─────────────────────────┘
┌────────────┐
│ ╔═╧═╗
│ ║ 80║
│ ╚═╤═╝
│ │
│ 81─┼─ man
│ │
│ ┌─┴─┐ ┌──────────────────────────────────────────────┐
│ │ 82├─┤F/BASE:(1);if (posa && bas && s && n) SERRE=1;│
│ └─┬─┘ │if(posf && bas && s && n) SERRE=0; │
│ │ │ │
│ 82─┼─ !man────────────────────────────────────────────┘
│ │
└────────────┘
Corrigé Page 2-13 OFPPT/TECCART
Corrigé Automates Programmables II
< 4 >
│
╔═╧═╗
║ 90║
╚═╤═╝
│
90─┼─ man&&e&&!posf&&!(SERRE&&!haut)&&!bas
│
┌─┴─┐ ┌───────┐
│ 91├─┤DROITE;│
└─┬─┘ └───────┘
│
91─┼─ !man||!e||posf||bas
│
│
< 4 >
< 5 >
│
╔═╧═╗
║101║
╚═╤═╝
│
100─┼─ man&&o&&!posa&&!(SERRE&&!haut)&&!bas
│
┌─┴─┐ ┌───────┐
│100├─┤GAUCHE;│
└─┬─┘ └───────┘
│
101─┼─ !man||!o||posa||bas
│
│
< 5 >
< 6 >
│
╔═╧═╗
║201║
╚═╤═╝
│
200─┼─ man&&s&&!bas&&!(SERRE&&posa)
│
┌─┴─┐ ┌─────┐
│200├─┤DESC;│
└─┬─┘ │ │
│ └─────┘
201─┼─ !man||!s||bas
│
│
< 6 >
< 7 >
│
╔═╧═╗
║301║
╚═╤═╝
│
300─┼─ man&&n&&!haut
│
┌─┴─┐ ┌─────┐
│300├─┤MONT;│
└─┬─┘ └─────┘
│
301─┼─ !man||!n||haut
│
│
< 7 >
Corrigé Page 2-14 OFPPT/TECCART
Corrigé Automates Programmables II
2.4 TP4 : Ascenseur (GRAFCET-LADDER)
Fichier .. : @ASC#2.GF7
Description : controle de l'ascenseur 3 etages
Niveau : Programmation , Page : 1
< 1 >
│
auto ╔═╧═╗
║ 1 ║
╚═╤═╝
┌───────────────────┬────────────────┼────────────────────┬────────────────┐
│ │ │ │ │
1─┼─ (cen || der) 2─┼─ der && apc 9─┼─ ((bas&&apb)|| 3─┼─ bas && apc 4─┼─ (cen || bas)
│ && apb && fer │ && fer │ (cen&&apc) || │ && fer │ && aph && fer
┌─┴─┐ ┌─────┐ ┌─┴─┐ ┌─────┐ │ (der&&aph)) ┌─┴─┐ ┌─────┐ ┌─┴─┐ ┌─────┐
│ 2 ├─┤DESC;│ │ 3 ├─┤DESC;│ │ &&fer │ 4 ├─┤MONT;│ │ 5 ├─┤MONT;│
└─┬─┘ └─────┘ └─┬─┘ └─────┘ │ └─┬─┘ └─────┘ └─┬─┘ └─────┘
│ │ │ │ │
5─┼─ bas 6─┼─ cen │ 7─┼─ cen 8─┼─ der
│ │ │ │ │
└───────────────────┴────────────────┼────────────────────┴────────────────┘
┌─┴─┐ ┌─────┐
│ 7 ├─┤PORT;│
└─┬─┘ └─────┘
10─┼─ ouv
┌─┴─┐ ┌─────┐
│ 8 ├─┤PORT;│
└─┬─┘ └─────┘
│
11─┼─ T/5s/X8
│
< 1 >
<8> <3>
│ │
╔═╧═╗ moment╔═╧═╗
║34 ║ ║17 ║
╚═╤═╝ ╚═╤═╝
│ │
34─┼─T/0.5s/X34 19─┼─r
│ │
┌─┴─┐ ┌─┴─┐
│35 │ │18 │
└─┬─┘ └─┬─┘
│ │
35─┼─T/0.5s/X35 23─┼─bas||cen||der
│ │
┌─┴─┐ ┌─┴─┐ ┌─────────────────────────────────────┐
│36 │ │19 ├─┤F/auto:(8);if(bas&&X34)LUMB; │
└─┬─┘ └─┬─┘ │if(cen&&X34)LUMC;if(der&&X34)LUMH; │
│ │ └─────────────────────────────────────┘
36─┼─T/0.5s/X36||X19 27─┼─!r
│ │
│ │
<8> <3>
<4>
│
╔═╧═╗ ┌───────────────────────────────────┐
║20 ╟─┤if(bas&&!r)LUMB;if(cen&&!r)LUMC; │
╚═╤═╝ │if(der&&!r)LUMH; │
│ └───────────────────────────────────┘
24─┼─a
│
┌─┴─┐ ┌─────────────────────────┐
│21 ├─┤F/auto:(*);F/moment:(17);│
└─┬─┘ │MONT=0;DESC=0;PORT=0; │
│ │if(X34)LUMB; │
│ │if(X35)LUMC; │
│ │if(X36)LUMH; │
│ │ │
│ └─────────────────────────┘
25─┼─!a
│
<4>
Corrigé Page 2-15 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 1
| |
| Rung: 001 ****************** Section des transitions ******************** |
| |
| APPEL |
| X1 CEN BAS FER TR1 |
| 801 006 001 009 701 |
+--] [-+-] [-+-] [---] [----------------------------------------------( )----+
| | | |
| | | |
| |DER | |
| | 007 | |
| +-] [-+ |
| |
| Rung: 002 |
| |
| APPEL |
| X1 DER CEN FER TR2 |
| 801 007 002 009 702 |
+--] [---] [---] [---] [----------------------------------------------( )----+
| |
| Rung: 003 |
| |
| APPEL |
| X1 BAS CEN FER TR3 |
| 801 010 002 009 703 |
+--] [---] [---] [---] [----------------------------------------------( )----+
| |
| Rung: 004 |
| |
| APPEL |
| X1 CEN DER FER TR4 |
| 801 006 003 009 704 |
+--] [-+-] [-+-] [---] [----------------------------------------------( )----+
| | | |
| | | |
| |BAS | |
| | 010 | |
| +-] [-+ |
| |
| Rung: 005 |
| |
| |
| X2 BAS TR5 |
| 802 010 705 |
+--] [---] [----------------------------------------------------------( )----+
| |
| Rung: 006 |
| |
| |
| X3 CEN TR6 |
| 803 006 706 |
+--] [---] [----------------------------------------------------------( )----+
Corrigé Page 2-16 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 2
| |
| Rung: 007 |
| |
| |
| X4 CEN TR7 |
| 804 006 707 |
+--] [---] [----------------------------------------------------------( )----+
| |
| Rung: 008 |
| |
| |
| X5 DER TR8 |
| 805 007 708 |
+--] [---] [----------------------------------------------------------( )----+
| |
| Rung: 009 |
| |
| APPEL |
| X1 BAS BAS FER TR9 |
| 801 010 001 009 709 |
+--] [-+-] [---] [-+-] [----------------------------------------------( )----+
| | | |
| | APPEL| |
| |CEN CEN | |
| | 006 002 | |
| +-] [---] [-+ |
| | | |
| | APPEL| |
| |DER DER | |
| | 007 003 | |
| +-] [---] [-+ |
| |
| Rung: 010 |
| |
| |
| X7 OUV TR10 |
| 807 008 710 |
+--] [---] [----------------------------------------------------------( )----+
| |
| Rung: 011 |
| |
| |
| X8 TX8 TR11 |
| 808 908 711 |
+--] [---] [----------------------------------------------------------( )----+
| |
| Rung: 012 |
| |
| ARRET |
| X17 M TR19 |
| 817 004 719 |
+--] [---]\[----------------------------------------------------------( )----+
Corrigé Page 2-17 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 3
| |
| Rung: 013 |
| |
| |
| X18 BAS TR23 |
| 818 010 723 |
+--] [-+-] [-+--------------------------------------------------------( )----+
| | | |
| | | |
| |CEN | |
| | 006 | |
| +-] [-+ |
| | | |
| | | |
| |DER | |
| | 007 | |
| +-] [-+ |
| |
| Rung: 014 |
| |
| ARRET |
| X20 U TR24 |
| 820 005 724 |
+--] [---]\[----------------------------------------------------------( )----+
| |
| Rung: 015 |
| |
| ARRET |
| X21 U TR25 |
| 821 005 725 |
+--] [---] [----------------------------------------------------------( )----+
| |
| Rung: 016 |
| |
| ARRET |
| X19 M TR27 |
| 819 004 727 |
+--] [---] [----------------------------------------------------------( )----+
| |
| Rung: 017 |
| |
| |
| X34 TX34 TR34 |
| 834 914 734 |
+--] [---] [----------------------------------------------------------( )----+
| |
| Rung: 018 |
| |
| |
| X35 TX35 TR35 |
| 835 915 735 |
+--] [---] [----------------------------------------------------------( )----+
Corrigé Page 2-18 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 4
| |
| Rung: 019 |
| |
| |
| X36 TX36 TR36 |
| 836 916 736 |
+--] [-+-] [-+--------------------------------------------------------( )----+
| | | |
| | | |
| |X19 | |
| | 819 | |
| +-] [-+ |
| |
| Rung: 020 |
| |
| |
| X21 |
| 821 |
+--]\[----------------------------------------------------------------(ZCL)----+
| |
| Rung: 021 |
| |
| |
| X19 |
| 819 |
+--]\[----------------------------------------------------------------(MCR)----+
| |
| Rung: 022 ************** Section des etapes ************************** |
| |
| |
| PS X1 |
| 800 801 |
++-]\[-------------------------------+--------------------------------( )----+
|| | |
|| | |
||TR11 | |
|| 711 | |
|+-] [-------------------------------+ |
|| | |
|| | |
||X1 X2 X3 X7 X4 X5 | |
|| 801 802 803 807 804 805 | |
|+-] [---]\[---]\[---]\[---]\[---]\[-+ |
| |
| Rung: 023 |
| |
| |
| TR1 X2 |
| 701 802 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X2 TR5 | |
|| 802 705 | |
|+-] [---]\[-+ |
Corrigé Page 2-19 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 5
| |
| Rung: 024 |
| |
| |
| TR2 X3 |
| 702 803 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X3 TR6 | |
|| 803 706 | |
|+-] [---]\[-+ |
| |
| Rung: 025 |
| |
| |
| TR3 X4 |
| 703 804 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X4 TR7 | |
|| 804 707 | |
|+-] [---]\[-+ |
| |
| Rung: 026 |
| |
| |
| TR4 X5 |
| 704 805 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X5 TR8 | |
|| 805 708 | |
|+-] [---]\[-+ |
| |
| Rung: 027 |
| |
| |
| TR5 X7 |
| 705 807 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||TR6 | |
|| 706 | |
|+-] [-------+ |
|| | |
|| | |
||TR9 | |
|| 709 | |
|+-] [-------+ |
|| | |
|| | |
||TR7 | |
|| 707 | |
|+-] [-------+ |
Corrigé Page 2-20 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 6
|| | |
|| | |
||TR8 | |
|| 708 | |
|+-] [-------+ |
|| | |
|| | |
||X7 TR10 | |
|| 807 710 | |
|+-] [---]\[-+ |
| |
| Rung: 028 |
| |
| |
| |
| |
+---------------------------------------------------------------------(MCR)----+
| |
| Rung: 029 |
| |
| |
| X19 X8 |
| 819 808 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||TR10 | |
|| 710 | |
|+-] [-------+ |
|| | |
|| | |
||X8 TR11 | |
|| 808 711 | |
|+-] [---]\[-+ |
| |
| Rung: 030 |
| |
| |
| |
| |
+---------------------------------------------------------------------(ZCL)----+
| |
| Rung: 031 |
| |
| |
| PS X17 |
| 800 817 |
++-]\[-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X21 | |
|| 821 | |
|+-] [-------+ |
|| | |
|| | |
||TR27 | |
|| 727 | |
|+-] [-------+ |
Corrigé Page 2-21 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 7
|| | |
|| | |
||X17 TR19 | |
|| 817 719 | |
|+-] [---]\[-+ |
| |
| Rung: 032 |
| |
| |
| X21 |
| 821 |
+--]\[----------------------------------------------------------------(MCR)----+
| |
| Rung: 033 |
| |
| |
| TR19 X18 |
| 719 818 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X18 TR23 | |
|| 818 723 | |
|+-] [---]\[-+ |
| |
| Rung: 034 |
| |
| |
| TR23 X19 |
| 723 819 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X19 TR27 | |
|| 819 727 | |
|+-] [---]\[-+ |
| |
| Rung: 035 |
| |
| |
| |
| |
+---------------------------------------------------------------------(MCR)----+
| |
| Rung: 036 |
| |
| |
| PS X20 |
| 800 820 |
++-]\[-------+--------------------------------------------------------( )----+
|| | |
|| | |
||TR25 | |
|| 725 | |
|+-] [-------+ |
Corrigé Page 2-22 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 8
|| | |
|| | |
||X20 TR24 | |
|| 820 724 | |
|+-] [---]\[-+ |
| |
| Rung: 037 |
| |
| |
| TR24 X21 |
| 724 821 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X21 TR25 | |
|| 821 725 | |
|+-] [---]\[-+ |
| |
| Rung: 038 |
| |
| |
| PS X34 |
| 800 834 |
++-]\[-------+--------------------------------------------------------( )----+
|| | |
|| | |
||TR36 | |
|| 736 | |
|+-] [-------+ |
|| | |
|| | |
||X34 TR34 | |
|| 834 734 | |
|+-] [---]\[-+ |
| |
| Rung: 039 |
| |
| |
| TR34 X35 |
| 734 835 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X35 TR35 | |
|| 835 735 | |
|+-] [---]\[-+ |
| |
| Rung: 040 |
| |
| |
| TR35 X36 |
| 735 836 |
++-] [-------+--------------------------------------------------------( )----+
|| | |
|| | |
||X36 TR36 | |
|| 836 736 | |
|+-] [---]\[-+ |
Corrigé Page 2-23 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 9
| |
| Rung: 041 ********* Section des Temporisateurs/Compteurs *************** |
| |
| |
| X8 TX8 |
| 808 908 |
+--] [----------------------------------------------------------------(RTO)----+
| PR 0050 |
| |
| Rung: 042 |
| |
| |
| X8 TX8 |
| 808 908 |
+--]\[----------------------------------------------------------------(RST)----+
| RE 0000 |
| |
| Rung: 043 |
| |
| |
| X34 TX34 |
| 834 914 |
+--] [----------------------------------------------------------------(RTO)----+
| PR 0005 |
| |
| Rung: 044 |
| |
| |
| X34 TX34 |
| 834 914 |
+--]\[----------------------------------------------------------------(RST)----+
| RE 0000 |
| |
| Rung: 045 |
| |
| |
| X35 TX35 |
| 835 915 |
+--] [----------------------------------------------------------------(RTO)----+
| PR 0005 |
| |
| Rung: 046 |
| |
| |
| X35 TX35 |
| 835 915 |
+--]\[----------------------------------------------------------------(RST)----+
| RE 0000 |
| |
| Rung: 047 |
| |
| |
| X36 TX36 |
| 836 916 |
+--] [----------------------------------------------------------------(RTO)----+
| PR 0005 |
Corrigé Page 2-24 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 10
| |
| Rung: 048 |
| |
| |
| X36 TX36 |
| 836 916 |
+--]\[----------------------------------------------------------------(RST)----+
| RE 0000 |
| |
| Rung: 049 -------------- SECTION DES SORTIES ---------------- |
| |
| |
| X4 X21 MONT |
| 804 821 011 |
++-] [-+-]\[----------------------------------------------------------( )----+
|| | |
|| | |
||X5 | |
|| 805 | |
|+-] [-+ |
| |
| Rung: 050 |
| |
| |
| X2 X21 DESC |
| 802 821 012 |
++-] [-+-]\[----------------------------------------------------------( )----+
|| | |
|| | |
||X3 | |
|| 803 | |
|+-] [-+ |
| |
| Rung: 051 |
| |
| |
| X7 X21 PORTE |
| 807 821 013 |
++-] [-+-]\[----------------------------------------------------------( )----+
|| | |
|| | |
||X8 | |
|| 808 | |
|+-] [-+ |
| |
| Rung: 052 |
| |
| |
| X19 BAS X34 LUMB |
| 819 010 834 014 |
++-] [---] [---] [-+--------------------------------------------------( )----+
|| | |
|| ARRET| |
||X20 BAS M | |
|| 820 010 004 | |
|+-] [---] [---] [-+ |
Corrigé Page 2-25 OFPPT/TECCART
Corrigé Automates Programmables II
Date: 06-09-96 Heure: 09:55:09 Fichier : TPB_APS
Traduction GRAFCET-LADDER (Ascenseur)
Programme SLC100 Allen-Bradley Ladder Diagram Page 11
|| | |
|| | |
||X21 X34 | |
|| 821 834 | |
|+-] [---] [-------+ |
| |
| Rung: 053 |
| |
| |
| X19 CEN X34 LUMC |
| 819 006 834 015 |
++-] [---] [---] [-+--------------------------------------------------( )----+
|| | |
|| ARRET| |
||X20 CEN M | |
|| 820 006 004 | |
|+-] [---] [---] [-+ |
|| | |
|| | |
||X21 X35 | |
|| 821 835 | |
|+-] [---] [-------+ |
| |
| Rung: 054 |
| |
| |
| X19 DER X34 LUMH |
| 819 007 834 016 |
++-] [---] [---] [-+--------------------------------------------------( )----+
|| | |
|| ARRET| |
||X20 DER M | |
|| 820 007 004 | |
|+-] [---] [---] [-+ |
|| | |
|| | |
||X21 X36 | |
|| 821 836 | |
|+-] [---] [-------+ |
| |
+--------------------- Fin-Diagramme --- Longueur = 00311 -------------------+
Corrigé Page 2-26 OFPPT/TECCART
Corrigé Automates Programmables II
2.5 TP5 : Outils de dépannage
2.6 TP6 : Choix d’un API
D E S C R I P T I O N D ' U N API G E FANUC
Marque GE FANUC Modèle SÉRIE UN
Constitution: Langage de programmation
Modulaire; LADDER et blocs de fonctions
Monobloc; liste d’instruction
# Entrées/sorties: logigramme;
discrètes (tout-ou-rien); 112 GRAFCET.
analogiques; Jeu d’instructions
déportées. Nombre d’instructions ?
Capacité mémoire en kmots: nombre de sous-programmes
programme; 1724 mots BCD /DCB
mots de données; Console de programmation
bits internes; 144 De poche
temporisateur/compteur. 64 Moniteur portable
Type mémoire programme: PC ou compatible
RAM RAM nécessaire ?
EPROM disque dur ?
EEPROM interfaces ?
Fonctions internes: systèmes d’exploitation ?
Modification en mode RUN; Réseau
horloge en temps réel; Marques
calendrier; capacité d’adressage
configuration logicielle; protocole
interruption; topologie
sous-programme; norme
accès par mot de passe. Vitesse de transmission
Diagnostic Média
par DEL sur l’UC; Distance de liaisons
bits de diagnostic du système; Commercialisation
table de diagnostic. Date ?
Cartes intelligentes: Pays d’origine ?
axe; Documentation ?
comptage rapide; Divers (inscrire)
BASIC;
communication série;
réseau;
analogiques;
thermocouple;
sonde à résistance;
régulateur PID;
Corrigé Page 2-27 OFPPT/TECCART
Corrigé Automates Programmables II
D E S C R I P T I O N D ' U N API ALLEN- BRADLEY
Marque Allen-Bradley Modèle SLC 100
Constitution: Langage de programmation
Modulaire; LADDER et blocs de fonctions
Monobloc; liste d’instruction
# Entrées/sorties: logigramme;
discrètes (tout-ou-rien); GRAFCET.
analogiques; Jeu d’instructions
déportées. Nombre d’instructions ?
Capacité mémoire en kmots: nombre de sous-programmes
programme; ? BCD /DCB
mots de données; Console de programmation
bits internes; 181 De poche
temporisateur/compteur. 32 Moniteur portable
Type mémoire programme: PC ou compatible
RAM pile RAM nécessaire peu
EPROM disque dur non
EEPROM interfaces oui
Fonctions internes: systèmes d’exploitation DOS
Modification en mode RUN; Réseau
horloge en temps réel; Marques
calendrier; capacité d’adressage
configuration logicielle; protocole
interruption; topologie
sous-programme; norme
accès par mot de passe. Vitesse de transmission
Diagnostic Média
par DEL sur l’UC; Distance de liaisons
bits de diagnostic du système; Commercialisation
table de diagnostic. Date
Cartes intelligentes: Pays d’origine E.U.
axe; Documentation anglais
comptage rapide; Divers (inscrire)
BASIC;
communication série;
réseau;
analogiques;
thermocouple;
sonde à résistance;
régulateur PID;
Corrigé Page 2-28 OFPPT/TECCART
Corrigé Automates Programmables II
D E S C R I P T I O N D ' U N API ALLEN- BRADLEY
Marque Allen-Bradley Modèle SLC 500 (5/03)
Constitution: Langage de programmation
Modulaire; LADDER et blocs de fonctions
Monobloc; liste d’instruction
# Entrées/sorties: logigramme;
discrètes (tout-ou-rien); 960 GRAFCET.
analogiques; Jeu d’instructions
déportées. Nombre d’instructions 71
Capacité mémoire en kmots: nombre de sous-programmes ?
programme; 12 kmots BCD /DCB
mots de données; Console de programmation
bits internes; De poche
temporisateur/compteur. 256/256 Moniteur portable
Type mémoire programme: PC ou compatible
RAM RAM nécessaire standard
EPROM ? disque dur oui
EEPROM ? interfaces oui
Fonctions internes: systèmes d’exploitation DOS
Modification en mode RUN; Réseau
horloge en temps réel; Marques DH-485
calendrier; capacité d’adressage ?
configuration logicielle; protocole DH-485
interruption; topologie ?
sous-programme; norme ?
accès par mot de passe. Vitesse de transmission ?
Diagnostic Média ?
par DEL sur l’UC; Distance de liaisons ?
bits de diagnostic du système; Commercialisation
table de diagnostic. Date ?
Cartes intelligentes: Pays d’origine E.U.
axe; ? Documentation Français
comptage rapide; Divers (inscrire)
BASIC; ?
communication série;
réseau;
analogiques;
thermocouple; ?
sonde à résistance; ?
régulateur PID;
Corrigé Page 2-29 OFPPT/TECCART
Corrigé Automates Programmables II
D E S C R I P T I O N D ' U N API O M RO N
Marque Omron Modèle C28K sans extension
Constitution: Langage de programmation
Modulaire; LADDER et blocs de fonctions
Monobloc; liste d’instruction
# Entrées/sorties: logigramme;
discrètes (tout-ou-rien); 28 GRAFCET.
analogiques; extension Jeu d’instructions
déportées. Nombre d’instructions 49
Capacité mémoire en kmots: nombre de sous-programmes ?
programme; 1194 instr. BCD /DCB ?
mots de données; ? Console de programmation
bits internes; 160 HR De poche
temporisateur/compteur. 48 Moniteur portable
Type mémoire programme: PC ou compatible ?
RAM RAM nécessaire ?
EPROM disque dur ?
EEPROM interfaces ?
Fonctions internes: systèmes d’exploitation ?
Modification en mode RUN; ? Réseau ?
horloge en temps réel; ? Marques
calendrier; ? capacité d’adressage
configuration logicielle; protocole
interruption; ? topologie
sous-programme; ? norme
accès par mot de passe. ? Vitesse de transmission
Diagnostic Média
par DEL sur l’UC; ? Distance de liaisons
bits de diagnostic du système; ? Commercialisation
table de diagnostic. ? Date ?
Cartes intelligentes: Pays d’origine Japon
axe; ? Documentation ?
comptage rapide; Divers (inscrire)
BASIC; ?
communication série; ?
réseau; ?
analogiques;
thermocouple; ?
sonde à résistance; ?
régulateur PID; ?
Corrigé Page 2-30 OFPPT/TECCART
Corrigé Automates Programmables II
D E S C R I P T I O N D ' U N API T ELÉM ÉCANI Q UE
Marque Télémécanique Modèle TSX 0721 1648
Constitution: Langage de programmation
Modulaire; LADDER et blocs de fonctions
Monobloc; liste d’instruction
# Entrées/sorties: logigramme; ?
discrètes (tout-ou-rien); 16 GRAFCET.
analogiques; Jeu d’instructions
déportées. Nombre d’instructions ?
Capacité mémoire en kmots: nombre de sous-programmes
programme; 1000 instr. BCD /DCB
mots de données; 256 Console de programmation
bits internes; 128 De poche
temporisateur/compteur. 32/16 Moniteur portable
Type mémoire programme: PC ou compatible
RAM RAM nécessaire
EPROM disque dur
EEPROM interfaces
Fonctions internes: systèmes d’exploitation
Modification en mode RUN; ? Réseau ?
horloge en temps réel; Marques
calendrier; capacité d’adressage
configuration logicielle; ? protocole
interruption; ? topologie
sous-programme; ? norme
accès par mot de passe. ? Vitesse de transmission
Diagnostic Média
par DEL sur l’UC; Distance de liaisons
bits de diagnostic du système; ? Commercialisation
table de diagnostic. ? Date
Cartes intelligentes: ? Pays d’origine Français
axe; Documentation
comptage rapide; Divers (inscrire)
BASIC;
communication série;
réseau;
analogiques;
thermocouple;
sonde à résistance;
régulateur PID;
Corrigé Page 2-31 OFPPT/TECCART
Corrigé Automates Programmables II
D E S C R I P T I O N D ' U N API T ELÉM ÉCANI Q UE
Marque Télémécanique Modèle TSX 47-20J
Constitution: Langage de programmation
Modulaire; LADDER et blocs de fonctions
Monobloc; liste d’instruction ?
# Entrées/sorties: logigramme; ?
discrètes (tout-ou-rien); 160 GRAFCET.
analogiques; Jeu d’instructions
déportées. Nombre d’instructions ?
Capacité mémoire en kmots: nombre de sous-programmes ?
programme; 2k BCD /DCB ?
mots de données; ? Console de programmation
bits internes; 256 De poche ?
temporisateur/compteur. Moniteur portable
Type mémoire programme: PC ou compatible
RAM 2k RAM nécessaire
EPROM disque dur
EEPROM interfaces
Fonctions internes: systèmes d’exploitation ?
Modification en mode RUN; ? Réseau
horloge en temps réel; Marques TELWAY
calendrier; capacité d’adressage
configuration logicielle; protocole
interruption; topologie
sous-programme; norme
accès par mot de passe. Vitesse de transmission
Diagnostic Média
par DEL sur l’UC; Distance de liaisons
bits de diagnostic du système; Commercialisation
table de diagnostic. ? Date
Cartes intelligentes: Pays d’origine Français
axe; Documentation Français
comptage rapide; Divers (inscrire)
BASIC;
communication série;
réseau;
analogiques;
thermocouple;
sonde à résistance;
régulateur PID;
Corrigé Page 2-32 OFPPT/TECCART
Corrigé Automates Programmables II
D E S C R I P T I O N D ' U N API SIEM ENS
Marque Siemens Modèle S5-90U
Constitution: Langage de programmation
Modulaire; LADDER et blocs de fonctions ?
Monobloc; liste d’instruction
# Entrées/sorties: logigramme;
discrètes (tout-ou-rien); 32 GRAFCET. STEP 5
analogiques; Jeu d’instructions
déportées. Nombre d’instructions ?
Capacité mémoire en kmots: nombre de sous-programmes ?
programme; 4 ko BCD /DCB ?
mots de données; Console de programmation
bits internes; 1024 De poche ?
temporisateur/compteur. 32/32 Moniteur portable ?
Type mémoire programme: PC ou compatible
RAM RAM nécessaire
EPROM disque dur
EEPROM interfaces
Fonctions internes: systèmes d’exploitation
Modification en mode RUN; ? Réseau
horloge en temps réel; ? Marques SINEC L1
calendrier; ? capacité d’adressage ?
configuration logicielle; ? protocole ?
interruption; ? topologie ?
sous-programme; ? norme ?
accès par mot de passe. ? Vitesse de transmission ?
Diagnostic Média ?
par DEL sur l’UC; Distance de liaisons ?
bits de diagnostic du système; ? Commercialisation
table de diagnostic. ? Date
Cartes intelligentes: Pays d’origine Allemagne
axe; ? Documentation Français
comptage rapide; ? Divers (inscrire)
BASIC; ?
communication série; ?
réseau; ?
analogiques; ?
thermocouple; ?
sonde à résistance; ?
régulateur PID; ?
Corrigé Page 2-33 OFPPT/TECCART
Corrigé Automates Programmables II
D E S C R I P T I O N D ' U N API SIEM ENS
Marque Siemens Modèle S5-100U
Constitution: Langage de programmation
Modulaire; LADDER et blocs de fonctions ?
Monobloc; liste d’instruction
# Entrées/sorties: logigramme;
discrètes (tout-ou-rien); 128 GRAFCET. STEP 5
analogiques; 8 Jeu d’instructions
déportées. Nombre d’instructions ?
Capacité mémoire en kmots: nombre de sous-programmes ?
programme; 2 ko BCD /DCB ?
mots de données; Console de programmation
bits internes; 1024 De poche
temporisateur/compteur. 32/32 Moniteur portable ?
Type mémoire programme: PC ou compatible
RAM RAM nécessaire
EPROM disque dur
EEPROM interfaces
Fonctions internes: systèmes d’exploitation
Modification en mode RUN; ? Réseau
horloge en temps réel; ? Marques
calendrier; ? capacité d’adressage
configuration logicielle; ? protocole
interruption; ? topologie
sous-programme; ? norme
accès par mot de passe. ? Vitesse de transmission
Diagnostic Média
par DEL sur l’UC; Distance de liaisons
bits de diagnostic du système; ? Commercialisation
table de diagnostic. ? Date
Cartes intelligentes: Pays d’origine Allemagne
axe; ? Documentation Français
comptage rapide; Divers (inscrire)
BASIC; ?
communication série; ?
réseau; ?
analogiques; ?
thermocouple; ?
sonde à résistance; ?
régulateur PID; ?
Corrigé Page 2-34 OFPPT/TECCART
Corrigé Automates Programmables II
Section 6.5 / Questionnaire
Question #1 - Il est peu probable qu’il soit possible d’utiliser des informations analogiques
puisqu’aucune mention de ce fait n’est exprimée dans les caractéristiques (Réf : RT8_AP2).
Question #2 - Le temps de scrutation sera environ de 22 msec.; 17 msec pour le programme;
4 à 5 msec pour les servitudes; il doit être ajouté (Réf : RT8_AP2).
Question #3 - Il est effectivement possible de réaliser directement les conversions BCD-
binaire et binaire-BCD en utilisant les instructions BTI et ITB (Réf : RT8_AP2).
Question #4 - Les instructions de bobines mémorisées se nomment SET et REST (Réf :
RT8_AP2).
Question #5 - Oui, il possède 16 horodateurs paramétrables (Réf : RT8_AP2).
Question #6 - La famille TSX 07 possède une configuration maximale de 24E/S avec 14
entrées et 10 sorties (Réf : RT8_AP2).
Question #7 - Un ensemble d’extension de 8 emplacements ajoutés au bac étendu à 8
emplacements permet d’utiliser le TSX 47 à un maximum de 16 emplacements (Réf : RT8_AP2).
Question #8 - En surface, le J identifie qu’il s’agit du processeur de base, puisqu’ils sont
limités aux bacs à 5 emplacements, sans extension possible (Réf : RT8_AP2, tableau des
caractéristiques).
Question #9 - Module processeur 1745-LP102 : alimentation et 10 entrées 170-265 Vca, 6
sorties 10-250 Vca. Module d’extension 1745-E104 : 10 entrées 18-30 Vcc, 6 sorties 10-250
Vca. (Réf : RT8_AP2).
Question #10 - 18 entrées et 12 sorties (Réf : RT8_AP2, figure du 30E/S).
Question #11 - Le manufacturier veut simplement dire qu’il possède des configurations
d’entrées et de sorties différentes, non pas par le nombre mais par les caractéristiques
électriques. Un tableau présente les 6 combinaisons différentes. Une lettre vient s’ajouter au
numéro pour différencier la combinaison.
Question #12 - 32 temporisateurs de 0,01 à 9990 sec. et 32 compteurs (Réf : RT8_AP2).
Question #13 - Le S5-95U, puisque l’autre ne possède pas d’E/S analogiques (Réf :
RT8_AP2).
Question #14 - De part le nombre (1024 et 2048) et l’emplacement (juste avant les
temporisateurs) dans le tableau des caractéristiques techniques, il est fort probable qu’il
s’agisse des relais internes ou bits internes (Réf : RT8_AP2).
Question #15 - Allemand (évidemment, c’est le pays d’origine du manufacturier), l’anglais, le
français, l’espagnol et l’italien (Réf : RT8_AP2).
Question #16 - Un détrompeur mécanique assigne un emplacement à un module empêchant
toute inversion lors du remplacement d’un module (Réf : RT8_AP2).
Corrigé Page 2-35 OFPPT/TECCART
Corrigé Automates Programmables II
3. Évaluations
3.1 Examen théorique #1
Question #1 - (3 points)
Module NI4 se trouve dans l’emplacement 3, donc l’adresse serait : I:3.0
Question #2 - (3 points)
160 kVA -0 kVA = 40% donc (40% x 16mA)+ 4mA = 10.4mA
400 kVA - 0kVA
résolution d’une entrée en courant = 1.2207A/ LSB
donc, si 1.2207A = LSB
10.4 mA = ?
réponse 8520
réponse en binaire = 0011 0001 0100 1000
Question #3 - (3 points)
PROGRAMME:
║ P_220KVA ║
║ ┌GRT───────────────┐ B3 ║
╟─┤PLUS GRAND QUE ├──────────────────────────────────────────────────( )────╢
║ │Source A IN_4_20MA│ 1 ║
║ │ 0│ ║
║ │Source B 10486│ ║
║ │ │ ║
║ └──────────────────┘ ║
║ P_240KVA ║
║ ┌GRT───────────────┐ B3 ║
╟─┤PLUS GRAND QUE ├──────────────────────────────────────────────────( )────╢
║ │Source A IN_4_20MA│ 2 ║
║ │ 0│ ║
║ │Source B 11141│ ║
║ │ │ ║
║ └──────────────────┘ ║
║ P_220KVA P_240KVA LUMIERE ║
║ B3 B3 O:1 ║
╟───] [────┬───]/[────┬──────────────────────────────────────────────────( )───╢
║ 1 │ 2 │ 0 ║
║ │ CLIGNOTE │ ║
║ │ S:4 │ ║
║ └───] [────┘ ║
║ 6 ║
Corrigé Page 3-36 OFPPT/TECCART
Corrigé Automates Programmables II
Question #4 - (3 points)
PROGRAMME:
Pour effectuer la mise à l’échelle, il faut transformer le code 0-10V ou 0-32768 en un code
allant de 0 à 20000. Pour ce faire, il faut diviser l’entrée par 1.6384. Puisqu’il est impossible
de diviser par un tel nombre, il faut combiner division et multiplication afin d’obtenir le bon
résultat. Différentes combinaisons peuvent être utlilisées. Ainsi, une combinaison de l’entrée
divisée par 1638 et multipliée par 1000 résultera en une division par 1.638.
║ ┌DIV───────────────┐ ║
╟─────────────────────────────────────────────────────────┤DIVISION ├─╢
║ │Source A IN_4_20MA│ ║
║ │ 0│ ║
║ │Source B 1638│ ║
║ │ │ ║
║ │Dest N7:1│ ║
║ │ 0│ ║
║ └──────────────────┘ ║
║ ┌MUL───────────────┐ ║
╟─────────────────────────────────────────────────────────┤MULTIPLICATION ├─╢
║ │Source A N7:1│ ║
║ │ 0│ ║
║ │Source B 1000│ ║
║ │ │ ║
║ │Dest N7:2│ ║
║ │ 0│ ║
║ └──────────────────┘ ║
Question #5 - (3 points)
Résolution de la sortie sur 15 bits est de 640.869 nA / LSB
Le code &H2CAA, une fois converti en décimales, correspond à 11 434,
donc le courant de sortie est de 11 434 *640.869 nA = 7.327 mA
La vanne aura donc une ouverture de : 7.33 mA - 4 mA = 20.8 %
20 mA - 4 mA
Question #6 - (3 points).
Le code binaire présenté agira selon tel le code de la roue codeuse, i.e. 0011 0101 0010 0100.
Ce code, une fois converti en décimales, est de 13604
Question #7 - (3 points)
PROGRAMME:
║ ┌AND───────────────┐ ║
╟─────────────────────────────────────────────────────────┤ET SUR BIT ├─╢
║ │Source A I:3.0│ ║
║ │ 0│ ║
║ │Source B -16│ ║
║ │ │ ║
║ │Dest N7:1│ ║
║ │ 0│ ║
║ └──────────────────┘ ║
Le code -16 correspond au code hexadécimal &HFFF0
Corrigé Page 3-37 OFPPT/TECCART
Corrigé Automates Programmables II
Question #8 - (3 points)
GRAFCET AUXILIAIRE DE L’ALARME:
< 1 > < 2 >
│ │
╔═╧═╗ ╔═╧═╗
║ 1 ║ ║ 3 ║
╚═╤═╝ ╚═╤═╝
│ │
1─┼─ T/0.5s/X1 3─┼─ n||s||e||o
│ │
┌─┴─┐ ┌─┴─┐ ┌───────────────┐
│ 2 │ │ 4 ├─┤if (X1) ALARME;│
└─┬─┘ └─┬─┘ └───────────────┘
│ │
2─┼─ X4 && T/1.5s/X2 4─┼─ !n&&!s&&!e&&!o
│ │
│ │
< 1 > < 2 >
La réceptivité X4 élimine le fait que le premier son peut être plus court que 0.5 seconde ou et
oblige l’alarme à débuter par un son. Évidement, cette solution n’est pas unique et d’autres
types de GRAFCET peuvent très bien être fonctionnels.
Question #9 - (3 points)
GRAFCET AUXILIAIRE DE L’ARRÊT COMPLET:
< 3 >
│
╔═╧═╗
║100║
╚═╤═╝
100─┼─ a
┌─┴─┐ ┌────────────────┐
│101├─┤F/BASE:(1);MONT;│
└─┬─┘ └────────────────┘
101─┼─ haut
┌─┴─┐ ┌───────┐
│102├─┤DROITE;│
└─┬─┘ └───────┘
102─┼─ posf
┌─┴─┐
│103│
└─┬─┘
103─┼─ !a
│
< 3 >
Corrigé Page 3-38 OFPPT/TECCART
Corrigé Automates Programmables II
Question #10 - (3 points)
< 1 >
│
base ╔═╧═╗ ┌
║ 1 ╟─┤
╚═╤═╝ └
│
1─┼─ go&&(h&&!p) && !s
│
┌─┴─┐ ┌
│ 2 ├─┤ if (!p) DEPO; LUMB;
└─┬─┘ └
│
2─┼─ p && !s
│
┌─┴─┐ ┌
│ 3 ├─┤ if (!b) DESC; MOTEUR;
└─┬─┘ └
│
3─┼─ b && !s
│
┌─┴─┐ ┌
│ 4 ├─┤ if (!c) MONT; MOTEUR;
└─┬─┘ └
│
4─┼─ c && !s
│
╪══════════════════════════════╤
┌─┴─┐ ┌ ┌─┴─┐ ┌
│ 5 ├─┤ MONT; │ 6 ├─┤ ENLE;
└─┬─┘ └ └─┬─┘ └
│ │
7─┼─ h 6─┼─ e
│ │
┌─┴─┐ ┌ ┌─┴─┐ ┌
│ 7 ├─┤ │ 8 ├─┤
└─┬─┘ └ └─┬─┘ └
╪══════════════════════════════╧
│
8─┼─ 1 && !s
│
│
< 1 >
Les étapes 5 et 6 doivent se terminer avant de pouvoir bloquer la prochaine étape. Ainsi,
aucune modification n’est nécessaire dans cette section, hormis la réceptivité «!s» à la
transition 8. De plus, le moteur de la perceuse n’a pas à être contrôlé puisqu’il n’influence
pas l’évolution de la séquence GRAFCET.
Question #11 - (3 points)
SOLUTION
│
70─┼─ !m && !e && o &&(h||c) && !i
│
┌─┴─┐ ┌─────┐
│ 70├─┤ENLE;│
└─┬─┘ └─────┘
│
71─┼─ m||e||o &&(!h||!c)
│
Corrigé Page 3-39 OFPPT/TECCART
Corrigé Automates Programmables II
3.2 Examen Théorique #2
Question #1 - (3 points)
1. Le tableau présente le fichier de sorties et indique donc le nombre de modules de sorties,
en l’occurrence, trois.
2. Il indique l’emplacement de ces modules de sorties ; 1, 2, et 5.
3. Il indique le genre de module, i.e. les deux premiers sont tout-ou-rien et le dernier
analogique.
4. Finalement, il permet de connaître la valeur présente à chaque bit de chaque module.
Question #2 - (3 points)
Il s’agit des signets, drapeaux ou bits d’états arithmétiques permettant de connaître l’état de
la dernière opération mathématique.
Sign : Ce bit est à 1 lorsque le résultat est négatif (SIGN).
Zero : Ce bit est à 1 sit le résultat de l’opération est zéro (0) (ZERO).
Verflow : Ce bit est à 1 si le résultat dépasse le maximum de +32768.
Carry : Ce bit est à 1 si une retenue est effectué lors de l’opération.
Question #3 - (3 points)
Réponse : ____4.5_________seconde(s)
Question #4 - (3 points)
Non. Il est impossible de connaître la valeur à l’entrée, puisque les bits représentés par des «.»
ne force ni la valeur à 1 ni à 0. Par contre, nous pourrions affirmer que l’entrée I :7.2 est à
&H0FFF après une action de forçage puisque tous les bits sont forcés.
Question #5 - (2 points)
1. Télémécanique________________
2. Omron _______________________
3. Allen-Bradley _________________
4. Siemens ______________________
Question #6 - (2 points)
Les logiciels de supervision font partie de la couche APPLICATION du standard OSI tandis
que les modules de liaisons font référence à la couche LIAISON.
Question #7 - (2 points)
1. Coût. ________________________
2. Simplicité et versatilité du ou des logiciels.
3. Disponibilité des pièces de remplacement.
4. Service après vente.
5. Automate déjà existant dans l’entreprise.
Corrigé Page 3-40 OFPPT/TECCART
Corrigé Automates Programmables II
Question #8 - (3 points)
3- 1 : D E S C R I P T I O N D ’ U N API SLC 500
T AB L E AU
Marque ALLEN-BRADLEY Modèle SLC 500 ( 5/03)
Constitution : Langage de programmation
Modulaire ; LADDER et blocs de fonctions
Monobloc ; liste d’instruction
# Entrées/sorties : logigramme ;
discrètes (tout-ou-rien) ; GRAFCET.
analogiques ; Jeu d’instructions
déportées. Nombre d’instructions
Capacité mémoire en kmots : nombre de sous-programmes
programme ; BCD/DCB
mots de données ; > 256 Console de programmation
bits internes ; > 256 De poche
temporisateur / compteur. 256/256 Moniteur portable PC
Type mémoire programme : PC ou compatible
RAM RAM nécessaire
EEPROM interfaces RS 232C
Fonctions internes : systèmes d’exploitation MS/DOS
Modification en mode RUN ; Réseau
horloge en temps réel ; Marques DH-485
calendrier ; capacité d’adressage
configuration logicielle ; protocole
interruption ; topologie
sous-programme ; norme RS485
accès par mot de passe. Vitesse de transmission 19 200 bps
Diagnostic Média
par DEL sur l’UC ; Distance de liaisons
bits de diagnostic du système ; Commercialisation
table de diagnostic. Date
Cartes intelligentes : Pays d’origine E.U
axe ; Documentation Ang/Fran
comptage rapide ; Divers (inscrire)
communication série ;
réseau ;
analogiques ;
régulateur PID ;
Information que le stagiaire devrait se souvenir après un an d’utilisation ! ! !
Corrigé Page 3-41 OFPPT/TECCART
Corrigé Automates Programmables II
Question #9 - (3 points)
Un contact à fermeture X82 doit être placé en parallèle avec le barreau de l’étape initiale
du GRAFCET PRINCIPAL. Ceci permettra de forcer ce GRAFCET à l’étape X1 tel que
prévu à l’étape X82 par F/BASE : (1) ;
Placer les étapes du mode automatique dans un MCR contrôlé par l’étape X80.
Placer les étapes du mode manuel dans un MCR contrôlé par l’étape X82.
Question #10 - (3 points)
Un contact à fermeture X41 doit être placé en parallèle avec le barreau de l’étape initiale
du GRAFCET PRINCIPAL. Ceci permettra de forcer ce GRAFCET à l’étape X1 tel que
prévu à l’étape X82 par F/BASE : (1) ;
Placer les étapes du mode automatique dans un MCR contrôlé par l’étape X40.
Réaliser le GRAFCET D’ARRÊT
Question #11 - (3 points)
Il suffit simplement de placer un contact normalement fermé en série avec les sorties.
3.3 Examen Pratique #1
Aucune solution
Corrigé Page 3-42 OFPPT/TECCART
Corrigé Automates Programmables II
4. Questionnaires Périodiques
4.1 Questionnaire Périodique (TP1 & TP2)
Question #1 - Les réponses peuvent varier en fonction de la précision et de la calibration des
modules analogiques.
Question #2 - Les réponses peuvent varier en fonction de la précision et de la calibration des
modules analogiques.
Question #3 - La réponse peut varier en fonction de l’automate utilisé dans chaque
établissement.
Question #4 - La réponse peut varier en fonction des procédés de chaque établissement.
4.2 Questionnaire Périodique (TP3 & TP4)
Question #1 - PINCE =1 pour SET, PINCE = 0 pour RESET.
Question #2 - La réponse peut varier selon les stagiaires.
Question #3 - La réponse peut varier selon les stagiaires.
Question #4 - La réponse peut varier selon les stagiaires.
Question #5 - Avec l’aide de l’instruction MCR de l’automate.
4.3 Questionnaire Périodique (TP5 & TP6)
Question #1 - La réponse peut varier selon les stagiaires.
Question #2 - Des indicateurs « ON » et « OFF » se place au coté de l’instruction.
Question #3 - Les instructions de bobines mémorisées se nomment SET et RES (Réf :
RT8_AP2).
Question #4 - La famille TSX 07 possède une configuration maximale de 24E/S avec 14
entrées et 10 sorties (Réf : RT8_AP2)
Question #5 - 32 temporisateurs de 0,01 à 9990 sec. et 32 compteurs (Réf : RT8_AP2).
Question #6 - Un détrompeur mécanique assigne un emplacement à un module empêchant
toute inversion lors du remplacement d’un module (Réf : RT8_AP2, page 8-39, en bas à droite).
Corrigé Page 4-43 OFPPT/TECCART
Vous aimerez peut-être aussi
- TD CodeursDocument6 pagesTD CodeursMohamed Lahnine100% (2)
- Mr361espace IV Equipements ElectriqueDocument288 pagesMr361espace IV Equipements Electriquenicoj30100% (9)
- Exercices de Programmation TIA Step7Document4 pagesExercices de Programmation TIA Step7faqdani75% (4)
- TD2 Gemma PDFDocument3 pagesTD2 Gemma PDFyousef ouasfia100% (1)
- Checklist Engins Et Materiels ChantierDocument43 pagesChecklist Engins Et Materiels ChantierHamza Handour100% (6)
- Automate Partie AnalogiqueDocument153 pagesAutomate Partie AnalogiqueMassin agnawaPas encore d'évaluation
- Reglage_AFMDocument15 pagesReglage_AFMMatthieu FontenierPas encore d'évaluation
- API Emd2015Document1 pageAPI Emd2015jij le grandPas encore d'évaluation
- Cablage Ravoux BouchageDocument3 pagesCablage Ravoux BouchagepfePas encore d'évaluation
- Manual Zelio FrancesDocument86 pagesManual Zelio FrancesTimoty AvilaPas encore d'évaluation
- Unité3Document19 pagesUnité3Emilio del RioPas encore d'évaluation
- Circuit de Soupape Régulatrice de Pression de Commande D'injection - EssaiDocument8 pagesCircuit de Soupape Régulatrice de Pression de Commande D'injection - Essaihajar100% (1)
- DSF CF CCZDFDDocument8 pagesDSF CF CCZDFDhajarPas encore d'évaluation
- 5267766Document29 pages5267766Elvis OuattaraPas encore d'évaluation
- TD Cna-CanDocument5 pagesTD Cna-CanEmmanuelPas encore d'évaluation
- Catalogue ATS22 32ac166fDocument19 pagesCatalogue ATS22 32ac166fAbderrahmane BinPas encore d'évaluation
- ALI 2020-21 FinalDocument10 pagesALI 2020-21 Finalmariemhsini8Pas encore d'évaluation
- Automate TSX3705Document8 pagesAutomate TSX3705Hans lionel ABAGHA ELLAPas encore d'évaluation
- MP Amc Macpuarsa VFDocument26 pagesMP Amc Macpuarsa VFOli LurquinPas encore d'évaluation
- 09 - TD - FiabiliteDocument7 pages09 - TD - FiabiliteAymen HssainiPas encore d'évaluation
- Interbus: Guide de Démarrage RapideDocument84 pagesInterbus: Guide de Démarrage RapideIMAD MESKACHEPas encore d'évaluation
- Gammeoperatoirego4 091009011123 Phpapp02Document5 pagesGammeoperatoirego4 091009011123 Phpapp02JàMàl MejorPas encore d'évaluation
- Technique CDocument8 pagesTechnique CMahdi NjehPas encore d'évaluation
- Retour ONEE Note N°043Document3 pagesRetour ONEE Note N°043Best of game playPas encore d'évaluation
- Robomax Mise en Marche - FRDocument62 pagesRobomax Mise en Marche - FRHajar AsPas encore d'évaluation
- Delta Ia-Plc Dvp-Eh2 I Tse 20140730Document20 pagesDelta Ia-Plc Dvp-Eh2 I Tse 20140730Mauricio VillarroelPas encore d'évaluation
- SondeDocument5 pagesSondekaragaine100% (1)
- Sujet U32 2013Document13 pagesSujet U32 2013mouf zerargaPas encore d'évaluation
- Servo Sous FlowcodeDocument10 pagesServo Sous Flowcodezouaoua slimanePas encore d'évaluation
- Bts 2019 Elect de Puissance Asservissement Inf IndustDocument5 pagesBts 2019 Elect de Puissance Asservissement Inf IndustOk OkokPas encore d'évaluation
- Altistart 48 Telemecanique: Démarreurs-Ralentisseurs ProgressifsDocument82 pagesAltistart 48 Telemecanique: Démarreurs-Ralentisseurs ProgressifsZakaria AzekriPas encore d'évaluation
- Manuel TSX17Document70 pagesManuel TSX17Moctar TallePas encore d'évaluation
- 3-Principe de Programmation AnalogiqueDocument13 pages3-Principe de Programmation AnalogiqueKhalil BelghiyatiPas encore d'évaluation
- TD 6 Eno Corr-2 PDocument3 pagesTD 6 Eno Corr-2 PEs.sabery IsmailPas encore d'évaluation
- Twido PLCDocument5 pagesTwido PLCⵎⴻⵀⴷⵉⵡⵉ ⴱⵉⵍⴰⵍPas encore d'évaluation
- Gino Aka Akamas2.0 - FRDocument6 pagesGino Aka Akamas2.0 - FRharratmoussa6Pas encore d'évaluation
- TestDocument5 pagesTestNacer MaatiPas encore d'évaluation
- 07 Dem 2sensDocument8 pages07 Dem 2sensfatiham100% (1)
- ATV31C Installation Manual FR 1624728 04Document19 pagesATV31C Installation Manual FR 1624728 04anm bPas encore d'évaluation
- MultiplexeurDocument2 pagesMultiplexeurHouda FakhorPas encore d'évaluation
- Technique MalaxeurDocument19 pagesTechnique MalaxeurOssama DraouiPas encore d'évaluation
- RT c220 Cdi Part11Document21 pagesRT c220 Cdi Part11coyote41100% (1)
- 8848 Ave4scp Dossier RcponsesDocument9 pages8848 Ave4scp Dossier RcponsesMahrez Zaafouri0% (1)
- Architecture API - Partie 2Document9 pagesArchitecture API - Partie 2AbdoPas encore d'évaluation
- TD Optocoupleurs ProfDocument5 pagesTD Optocoupleurs ProfSalah-Eddine NasmiPas encore d'évaluation
- CD-610 Service ManualDocument32 pagesCD-610 Service ManualJuan SerprecoPas encore d'évaluation
- 01 - Séminaire API TELEMECANIQUE - GE-FF-S01 PDFDocument111 pages01 - Séminaire API TELEMECANIQUE - GE-FF-S01 PDFLotfi ElaoudPas encore d'évaluation
- 01 - Séminaire API TELEMECANIQUE - GE-FF-S01Document111 pages01 - Séminaire API TELEMECANIQUE - GE-FF-S01BOURASSPas encore d'évaluation
- Aii FF TheorieDocument5 pagesAii FF Theoriewisam100% (1)
- HacheuregDocument17 pagesHacheuregchabizahoPas encore d'évaluation
- 3-Principe de Programmation AnalogiqueDocument13 pages3-Principe de Programmation AnalogiquewalidjafPas encore d'évaluation
- 5.cours MCCDocument2 pages5.cours MCCmajdoubPas encore d'évaluation
- 490B - MANUAL - ESPANOL - (CRT Restorer) PDFDocument68 pages490B - MANUAL - ESPANOL - (CRT Restorer) PDFlalala99999Pas encore d'évaluation
- TD N°1Document4 pagesTD N°1Sanda OumarouPas encore d'évaluation
- Dossier Sti PDFDocument33 pagesDossier Sti PDFspiders12345678Pas encore d'évaluation
- TP 34.1 Trieur de BoîtesDocument6 pagesTP 34.1 Trieur de BoîtesMohamed Amine ZouhriPas encore d'évaluation
- Dik DunkDocument10 pagesDik DunkZakPas encore d'évaluation
- 2021 Guide de La Robotique StaubliDocument354 pages2021 Guide de La Robotique StaubliomarPas encore d'évaluation
- Introduction À La Programmation Des Systèmes Robotiques Industriels. Stéphane BazeilleDocument46 pagesIntroduction À La Programmation Des Systèmes Robotiques Industriels. Stéphane Bazeilleomar100% (1)
- MANUEL DE RÉFÉRENCE VAL3. Version 7Document192 pagesMANUEL DE RÉFÉRENCE VAL3. Version 7Vincent PateloupPas encore d'évaluation
- JournaldesSavanturiers 15webDocument5 pagesJournaldesSavanturiers 15webomarPas encore d'évaluation
- GradateursDocument17 pagesGradateursOmar MourtadaPas encore d'évaluation
- Exercices Regulation HEI42TCDocument60 pagesExercices Regulation HEI42TCMohamed Ben Fredj79% (14)
- Soit Le Circuit LogiqueDocument1 pageSoit Le Circuit LogiqueomarPas encore d'évaluation
- Capt Cond FMDocument1 pageCapt Cond FMomarPas encore d'évaluation
- Pic en C - TempsDocument19 pagesPic en C - TempsomarPas encore d'évaluation
- TD 1 CorrigéDocument4 pagesTD 1 Corrigéharoun tarifaPas encore d'évaluation
- MU S01 MY22 FRA Manuel Utilisation S01 MY22 V006Document68 pagesMU S01 MY22 FRA Manuel Utilisation S01 MY22 V006amine zaidiPas encore d'évaluation
- DC1 (15 11 08)Document7 pagesDC1 (15 11 08)Seif Souid100% (1)
- Cours Complet de Electricite de Batiment - Watermark PDFDocument38 pagesCours Complet de Electricite de Batiment - Watermark PDFSøu ÀbkPas encore d'évaluation
- T200i FR PDFDocument30 pagesT200i FR PDFdilo001Pas encore d'évaluation
- Topo Monte Charge PDFDocument27 pagesTopo Monte Charge PDFWilio VaguebleuPas encore d'évaluation
- Sujet RL RCDocument3 pagesSujet RL RCrihabPas encore d'évaluation
- 18 Tds GemmaDocument47 pages18 Tds GemmaMak HimPas encore d'évaluation
- A630 - Instructions de Montage Pont Suspendu EDL, EDK, DLVMDocument15 pagesA630 - Instructions de Montage Pont Suspendu EDL, EDK, DLVMerwan.leguen382Pas encore d'évaluation
- Changeurs de Prises Hors Tension Et en Charge (03-2009)Document49 pagesChangeurs de Prises Hors Tension Et en Charge (03-2009)merghem aminePas encore d'évaluation
- Guide 3Document12 pagesGuide 3Hind TananiPas encore d'évaluation
- Boudour Barkia Rapport FinalDocument36 pagesBoudour Barkia Rapport FinalBoudour BarkiaPas encore d'évaluation
- TP PneumatiqueDocument18 pagesTP Pneumatiquemoyabo0031Pas encore d'évaluation
- Fiche Produit Interruptuer DA Et DVV MusikDocument3 pagesFiche Produit Interruptuer DA Et DVV Musikjaouad id boubkerPas encore d'évaluation
- TD NumeriqueDocument7 pagesTD NumeriqueAmzil YouvitchPas encore d'évaluation
- Serie 2Document7 pagesSerie 2Ahmed TalebPas encore d'évaluation
- DOSSIER RESSOURCE Telerupteur MinuterieDocument6 pagesDOSSIER RESSOURCE Telerupteur MinuterieDann Fiesta100% (1)
- Manual FAIN66 V12-2013 FRANCÉSDocument83 pagesManual FAIN66 V12-2013 FRANCÉSPOULO BAPas encore d'évaluation
- Notice Broyeur MTD S2500Document12 pagesNotice Broyeur MTD S2500starf78Pas encore d'évaluation
- Cad J1Document98 pagesCad J1dan659Pas encore d'évaluation
- Classe TCDocument12 pagesClasse TCNemir MimirPas encore d'évaluation
- SSP 364 Audi Q7 - Équipement ÉlectriqueDocument60 pagesSSP 364 Audi Q7 - Équipement ÉlectriqueHAMDANE HAMDANEPas encore d'évaluation
- Selector OtisDocument36 pagesSelector OtisnesisPas encore d'évaluation
- Echographe: Mise en RouteDocument149 pagesEchographe: Mise en RouteFoued MbarkiPas encore d'évaluation
- Cour Techno Le Relais 2Document4 pagesCour Techno Le Relais 2Sylvain Nomenjanahary100% (1)
- TD1 Epreuve Du Brevet Technicien Supérieur ATIDocument30 pagesTD1 Epreuve Du Brevet Technicien Supérieur ATItamamlahmacunPas encore d'évaluation
- Les Taches EffectueDocument6 pagesLes Taches EffectueAberbri AbderrahimPas encore d'évaluation
- 244 Transmission Electrohydraulique Des 950G 962G PDFDocument37 pages244 Transmission Electrohydraulique Des 950G 962G PDFbrahim100% (1)