Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- M0motech Structures Extrait PDFDocument14 pagesM0motech Structures Extrait PDFMohamadou Ndjidda33% (3)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Exercices Regulation HEI42TCDocument60 pagesExercices Regulation HEI42TCMohamed Ben Fredj79% (14)
- Td4 Regulation IndustrielleDocument5 pagesTd4 Regulation IndustrielleZakaria BencherkiPas encore d'évaluation
- Cahier Exercices PIDDocument12 pagesCahier Exercices PIDGrue Volante100% (7)
- TP AutomatiqueDocument24 pagesTP AutomatiqueHoussam Haddani100% (1)
- Étude-D'une Poutre Continue CaquotDocument18 pagesÉtude-D'une Poutre Continue Caquotwajdi jaili100% (2)
- TD Automatique 1A JMD 2011Document20 pagesTD Automatique 1A JMD 2011Hajri MohamedPas encore d'évaluation
- TD01 Asservissements 1Document10 pagesTD01 Asservissements 1fekielyes100% (1)
- Etablissement Des MétrésDocument49 pagesEtablissement Des Métrésedouard dudePas encore d'évaluation
- Td7-Correction Et CorrigésDocument16 pagesTd7-Correction Et CorrigésHeni DaoudPas encore d'évaluation
- TD AsservissementDocument8 pagesTD AsservissementMohamed OuddourPas encore d'évaluation
- TD6 - Regulateurs PDFDocument4 pagesTD6 - Regulateurs PDFbenlamlih100% (1)
- GegmDocument6 pagesGegmAhmed LaoudiPas encore d'évaluation
- TD Automatique 1A 2016 JMDDocument20 pagesTD Automatique 1A 2016 JMDFaïssolath Achirou100% (1)
- Travail de Master LopezDocument121 pagesTravail de Master LopezMohamedChekibSkhiriPas encore d'évaluation
- TD Automatique 1A 2016 JMD 2Document20 pagesTD Automatique 1A 2016 JMD 2Adil ChentoufPas encore d'évaluation
- Seriemcc 1Document2 pagesSeriemcc 1lazraqy100% (1)
- TD01Asservissements1 PDFDocument10 pagesTD01Asservissements1 PDFELmokhtar Hamrouni100% (2)
- En 14488-2 Testing Sprayed ConcreteDocument10 pagesEn 14488-2 Testing Sprayed Concretelando buzzancaPas encore d'évaluation
- Automatique Des Systemes Lineaires (1GE & 1GIL) TD #5Document1 pageAutomatique Des Systemes Lineaires (1GE & 1GIL) TD #5Houssein OussyadPas encore d'évaluation
- Exam 2020 Geseer - GecsiDocument3 pagesExam 2020 Geseer - GecsiKooraNow HDPas encore d'évaluation
- TD 05Document2 pagesTD 05meriemfrik2Pas encore d'évaluation
- Soit Un Système de Second Ordre Défini Par La Fonction de Transfert en Boucle OuverteDocument3 pagesSoit Un Système de Second Ordre Défini Par La Fonction de Transfert en Boucle OuverteamalPas encore d'évaluation
- CC Bis Asser - LGE - 2023Document2 pagesCC Bis Asser - LGE - 2023Leroy Lionel SonfackPas encore d'évaluation
- Examen Principal SALC 3EMA - Novembre2017Document5 pagesExamen Principal SALC 3EMA - Novembre2017djamilPas encore d'évaluation
- TD6 PrecisonDocument2 pagesTD6 Precisonzakariae ben-akkaPas encore d'évaluation
- TD AutomatiqueDocument7 pagesTD AutomatiqueMartinien YawoloPas encore d'évaluation
- Série Rég GM - GIDocument5 pagesSérie Rég GM - GINisrine DaoukiPas encore d'évaluation
- Epreuve Automatique Mai 2013Document6 pagesEpreuve Automatique Mai 2013jobPas encore d'évaluation
- TDN°1Document4 pagesTDN°1samad marPas encore d'évaluation
- Auro1a2 TDDocument2 pagesAuro1a2 TDZu YadPas encore d'évaluation
- EMD2 AsservDocument2 pagesEMD2 AsservalimaPas encore d'évaluation
- Mai_2015 (2)Document6 pagesMai_2015 (2)Ali brahim MahamatPas encore d'évaluation
- TD AsservissementDocument9 pagesTD AsservissementAyoub ELJAFRYPas encore d'évaluation
- Enoncés Tpauto 2022 2023Document7 pagesEnoncés Tpauto 2022 2023Jj SimonPas encore d'évaluation
- TDasservissementDocument10 pagesTDasservissementSIDATIPas encore d'évaluation
- TD AsservissementDocument17 pagesTD AsservissementSOUFIANE BOURCHIHPas encore d'évaluation
- TD 3 Etude Des Systèmes DynamiquesDocument5 pagesTD 3 Etude Des Systèmes Dynamiqueskhaled hammiPas encore d'évaluation
- Travaux Dirigés ITDocument4 pagesTravaux Dirigés ITTHONYPas encore d'évaluation
- TD 06 - Comportement Temporel Des SLCI Du 2ème OrdreDocument8 pagesTD 06 - Comportement Temporel Des SLCI Du 2ème OrdreMohamed AbaakilPas encore d'évaluation
- TD3 Ge1 ArcDocument3 pagesTD3 Ge1 Arcfakhri menjliPas encore d'évaluation
- TD6 AsservissementDocument2 pagesTD6 AsservissementredPas encore d'évaluation
- Séance4 3EMBDocument4 pagesSéance4 3EMBselim ourariPas encore d'évaluation
- TD N°2 PDFDocument2 pagesTD N°2 PDFAbdou VerrattiPas encore d'évaluation
- Examen SALC 2022Document1 pageExamen SALC 2022nurPas encore d'évaluation
- TP2 Asservissement de Vitesse Dun VéhiculeDocument2 pagesTP2 Asservissement de Vitesse Dun VéhiculeSaint Cyr AhouaPas encore d'évaluation
- 144 Tdautomatique Tsi SpeDocument4 pages144 Tdautomatique Tsi SpeYoussef SadikPas encore d'évaluation
- TD3 CSLDocument4 pagesTD3 CSLgamerzxs681Pas encore d'évaluation
- RattrapageDocument1 pageRattrapagealimaPas encore d'évaluation
- Compte Rendu D'automatiqueDocument12 pagesCompte Rendu D'automatiqueMOHAMED TAMZAITIPas encore d'évaluation
- 2 Serie Notion Du Modèle La Transformé de Laplace CorrectionDocument3 pages2 Serie Notion Du Modèle La Transformé de Laplace Correctionmalika elorfPas encore d'évaluation
- TD Gestion de La Maintenance Et Sûreté de Fonctionnement FMDDocument3 pagesTD Gestion de La Maintenance Et Sûreté de Fonctionnement FMDAyaPas encore d'évaluation
- Ex cc2 2016Document1 pageEx cc2 2016malika elorfPas encore d'évaluation
- chapitreII de TdsDocument117 pageschapitreII de Tdsmalika elorfPas encore d'évaluation
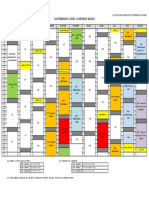
- Calendrier Académique 2022-2023Document1 pageCalendrier Académique 2022-2023malika elorfPas encore d'évaluation
- ExercicesRésolus InstrumentationDocument83 pagesExercicesRésolus Instrumentationmalika elorfPas encore d'évaluation
- 1 - Cours (Numérique) Part 1Document38 pages1 - Cours (Numérique) Part 1malika elorfPas encore d'évaluation
- 2 - Cours (Numérique) Part 2Document68 pages2 - Cours (Numérique) Part 2malika elorfPas encore d'évaluation
- TD 2 Mecanique Solide 2022-2023Document1 pageTD 2 Mecanique Solide 2022-2023malika elorfPas encore d'évaluation
- TP No 1Document4 pagesTP No 1malika elorfPas encore d'évaluation
- Projet Sur Le Fameux Circuit NE555Document12 pagesProjet Sur Le Fameux Circuit NE555malika elorfPas encore d'évaluation
- Corrigé de La Série 2 MhsDocument9 pagesCorrigé de La Série 2 Mhsmalika elorfPas encore d'évaluation
- Mémoire BourezgDocument71 pagesMémoire BourezgWalidBenHamidouche100% (1)
- FONDATIONDocument27 pagesFONDATIONŘÄŅÆ starsPas encore d'évaluation
- Modeles de Grilles de Selection Des Fournisseurs v2 UtilDocument34 pagesModeles de Grilles de Selection Des Fournisseurs v2 UtilMEHDIPas encore d'évaluation
- L'Esprit de Service: Le CatalogueDocument28 pagesL'Esprit de Service: Le CatalogueWalid RzigPas encore d'évaluation
- Béton de MiscanthusDocument2 pagesBéton de MiscanthussalvadorPas encore d'évaluation
- Fiche de Révision Genie LogicielDocument7 pagesFiche de Révision Genie LogicielBrairain DupontPas encore d'évaluation
- BTP Pfe Elbaqia Imane 18Document123 pagesBTP Pfe Elbaqia Imane 18Hakimâ AbátàlebPas encore d'évaluation
- Mermet - Limite de QuantificationDocument64 pagesMermet - Limite de QuantificationLangelusyfairePas encore d'évaluation
- Chapitre 3 Dureté Des AgrégatsDocument20 pagesChapitre 3 Dureté Des AgrégatsGianPas encore d'évaluation
- Memoire PFE Mostefa 2009Document87 pagesMemoire PFE Mostefa 2009Najwa ElfadilePas encore d'évaluation