Vous aimerez peut-être aussi
- Cha - MMCDocument32 pagesCha - MMCSphinx InfiniPas encore d'évaluation
- Vis BoulonnerieDocument4 pagesVis BoulonnerieAchraf Moutahar100% (1)
- Magnétisme QuantiqueDocument16 pagesMagnétisme QuantiqueOthmane El BazPas encore d'évaluation
- Cours Mécanique Du Solide PDFDocument78 pagesCours Mécanique Du Solide PDFAnonymous GuTrdmh07100% (6)
- Correction de La Série N°3 de MPM - 2020-2021Document9 pagesCorrection de La Série N°3 de MPM - 2020-2021MounirPas encore d'évaluation
- Trains ÉpicycloïdauxDocument18 pagesTrains ÉpicycloïdauxadibPas encore d'évaluation
- Cours MMCDocument102 pagesCours MMCchadiPas encore d'évaluation
- TD 18 - Lois Entrée-Sortie en Position Et en VitesseDocument6 pagesTD 18 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- TD GrafcetDocument6 pagesTD GrafcetJovy Berny100% (1)
- Portiques MEFDocument10 pagesPortiques MEFArt Sceno100% (1)
- Torseur Action MecaniqueDocument8 pagesTorseur Action MecaniqueMaha Karray100% (1)
- ENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020Document8 pagesENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020NANA EmmanuelPas encore d'évaluation
- Merged 20230818 225501Document4 pagesMerged 20230818 225501djarir yahiaouiPas encore d'évaluation
- TD Dynamique 2Document2 pagesTD Dynamique 2Mak AlPas encore d'évaluation
- CHAPIII MG MPI 20 21 Visio 06 01 2021Document14 pagesCHAPIII MG MPI 20 21 Visio 06 01 2021mahdi cherifPas encore d'évaluation
- Série N°3 de Physique II SVII 2017 2018 FacultatifDocument8 pagesSérie N°3 de Physique II SVII 2017 2018 Facultatifbenkhaleqmaroua1Pas encore d'évaluation
- Gaz ElecDocument7 pagesGaz ElecgouretPas encore d'évaluation
- PDF Annales Examens Corrig S de M Canique Du Point SMPC Smia - CompressDocument63 pagesPDF Annales Examens Corrig S de M Canique Du Point SMPC Smia - Compressbihi.102.haytamPas encore d'évaluation
- Chapitre: Mesure Des Grandeurs Systemes D'Unite Equations Aux DimentionsDocument10 pagesChapitre: Mesure Des Grandeurs Systemes D'Unite Equations Aux Dimentionsyoannaffantodji750Pas encore d'évaluation
- Examen de Rattrapage MPM SMC 2017 2018Document2 pagesExamen de Rattrapage MPM SMC 2017 2018ibrahimhauryaraPas encore d'évaluation
- Chap0 Int MMCDocument43 pagesChap0 Int MMCAtif BelaidPas encore d'évaluation
- C7 - Cours StatiqueDocument24 pagesC7 - Cours Statiqueelouen.wurmserPas encore d'évaluation
- Cours Econométrie S6Document61 pagesCours Econométrie S6Jeriah VatusidiPas encore d'évaluation
- TP 5 Loi de NewtonDocument8 pagesTP 5 Loi de NewtonYasmine HaddadPas encore d'évaluation
- Econométrie Partie 1 Régression Linéaire Simple PDFDocument3 pagesEconométrie Partie 1 Régression Linéaire Simple PDFHanane FlawritaPas encore d'évaluation
- Sujet D'examen de Résistance Des Matériaux 2019Document6 pagesSujet D'examen de Résistance Des Matériaux 2019Lala BlanchePas encore d'évaluation
- 1 Bases Et Outils Mathematiques de La MMCDocument22 pages1 Bases Et Outils Mathematiques de La MMCib bacossPas encore d'évaluation
- امتحانات جهوية في الفيزياء والكيمياء خيار فرنسية الثالثة اعدادي 2022Document43 pagesامتحانات جهوية في الفيزياء والكيمياء خيار فرنسية الثالثة اعدادي 2022sarah nabilPas encore d'évaluation
- Exo 1 - 2 - 3 - 6Document10 pagesExo 1 - 2 - 3 - 6hasna zahriPas encore d'évaluation
- Série 2Document4 pagesSérie 2samir ghebouliPas encore d'évaluation
- 5444Document10 pages5444Mohamed OuaggaPas encore d'évaluation
- CCP Tsi 2020 Modelisation SujetDocument16 pagesCCP Tsi 2020 Modelisation Sujetabderrahim najimPas encore d'évaluation
- Chapitre I - MMC - Laasri - 22Document37 pagesChapitre I - MMC - Laasri - 22OumaimaPas encore d'évaluation
- TDmecaniquequantique 2Document17 pagesTDmecaniquequantique 2yassinePas encore d'évaluation
- Chapitre 5 1Document54 pagesChapitre 5 1Daoud El CaidPas encore d'évaluation
- SOUTDocument1 pageSOUTmeriem boutrabaPas encore d'évaluation
- Correction de La Série N°4 de MPM - 2020-2021-FacultatifDocument7 pagesCorrection de La Série N°4 de MPM - 2020-2021-FacultatifMounirPas encore d'évaluation
- C00 Masse Et Inertie Des SolidesDocument5 pagesC00 Masse Et Inertie Des SolidesMarc SalettePas encore d'évaluation
- Systemes MecaniquesDocument4 pagesSystemes MecaniquesCheikh Abdoul Hakim BABOUPas encore d'évaluation
- Cours Electromagnétisme - Chapitre 1 DiélectriqueDocument34 pagesCours Electromagnétisme - Chapitre 1 DiélectriqueAbdessamad ErraouiPas encore d'évaluation
- TD N°3 - SIGNAUX PHYSIQUES - CorrDocument21 pagesTD N°3 - SIGNAUX PHYSIQUES - CorrhermannibetowaPas encore d'évaluation
- 2-Ondes Électromagnétiques Dans Un Conducteur Et Dans Un PlasmaDocument9 pages2-Ondes Électromagnétiques Dans Un Conducteur Et Dans Un PlasmaNoureddine BoxePas encore d'évaluation
- Chap 2Document15 pagesChap 2alex.lamarre2002Pas encore d'évaluation
- Transmission de Puissance, Dimensionnement D'un ReducteurDocument55 pagesTransmission de Puissance, Dimensionnement D'un ReducteurcianyiPas encore d'évaluation
- Régime SinusoïdalDocument10 pagesRégime SinusoïdalSaad ThaminePas encore d'évaluation
- MMC1Document39 pagesMMC1Fouad KehilaPas encore d'évaluation
- Circuits Magnétiques - Principes: Réf.: D1050 V2Document21 pagesCircuits Magnétiques - Principes: Réf.: D1050 V2mehdii.ouazizPas encore d'évaluation
- Poly TD Ma PDFDocument131 pagesPoly TD Ma PDFMohamed Ali Chebbi100% (1)
- S2-TD2 (Matrice&déterminant)Document1 pageS2-TD2 (Matrice&déterminant)ANAAS benooPas encore d'évaluation
- Cours Mecaniquequantiqueii FinalDocument30 pagesCours Mecaniquequantiqueii FinalazzamPas encore d'évaluation
- Chapitre 3Document19 pagesChapitre 3Dehamon YllasPas encore d'évaluation
- Cours Theorie Des MecanismesDocument6 pagesCours Theorie Des MecanismesHamza GeulbiPas encore d'évaluation
- TP Physique PointageDocument6 pagesTP Physique Pointagecyrals lysPas encore d'évaluation
- Présentation - Mécanique Des Structures 1 - Partie 1Document97 pagesPrésentation - Mécanique Des Structures 1 - Partie 1ladjouzilyndaPas encore d'évaluation
- PHYSIQUE DES ONDES II DevoirDocument1 pagePHYSIQUE DES ONDES II DevoirPaul EssongPas encore d'évaluation
- Polycope Const Meca GM1Document96 pagesPolycope Const Meca GM1Nourdine EL-HASANYPas encore d'évaluation
- CNC MP 2012 Physique 2 EpreuveDocument8 pagesCNC MP 2012 Physique 2 EpreuveSalah GamerPas encore d'évaluation
- Sujet D'examen de Résistance Des Matériaux 2020Document8 pagesSujet D'examen de Résistance Des Matériaux 2020Lala BlanchePas encore d'évaluation
- Calibrage Géométrique D'une Caméra Ou D'un Capteur de Vision StéréoscopiqueDocument32 pagesCalibrage Géométrique D'une Caméra Ou D'un Capteur de Vision StéréoscopiqueAymen KeChiouchPas encore d'évaluation
- PHYSIQUE DES ONDES II RattrapagesDocument1 pagePHYSIQUE DES ONDES II RattrapagesPaul EssongPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1mohammedbahedixPas encore d'évaluation
- Traité de Mécanique Élémentaire (5e (... ) Francoeur Louis-Benjamin Bpt6k210174vDocument549 pagesTraité de Mécanique Élémentaire (5e (... ) Francoeur Louis-Benjamin Bpt6k210174vAndré Bernard PierrePas encore d'évaluation
- Notre RapportDocument39 pagesNotre RapportOussema SlimenPas encore d'évaluation
- Projet 4 - Workshop Energie 2021Document2 pagesProjet 4 - Workshop Energie 2021Bapt RoyPas encore d'évaluation
- Metho Choix Moteur Courant Continu.i4303.v085Document3 pagesMetho Choix Moteur Courant Continu.i4303.v085imadPas encore d'évaluation
- Cours ThermoDocument95 pagesCours ThermoNorfal McAwsomePas encore d'évaluation
- Calculs Efforts de SerrageDocument6 pagesCalculs Efforts de SerrageMarchalPas encore d'évaluation
- Examen Simulateurs des procédés 'Aspen HYSYS' L3 GP (variante 1 avec corrigé type)Document2 pagesExamen Simulateurs des procédés 'Aspen HYSYS' L3 GP (variante 1 avec corrigé type)Salah Eddine BENALLAL100% (1)
- TD4 - Méc Trans Puis - Frein SABDocument5 pagesTD4 - Méc Trans Puis - Frein SABskanderz408Pas encore d'évaluation
- HydrauliqueDocument17 pagesHydrauliqueAhmed EL ArfaouiPas encore d'évaluation
- QCM Moteur À Courant ContinuDocument3 pagesQCM Moteur À Courant ContinuMed Hedi Chabchoub100% (1)
- Physique Tles DCEF Capitre 7 - COURS OSCILLATIONS MECANIQUESDocument6 pagesPhysique Tles DCEF Capitre 7 - COURS OSCILLATIONS MECANIQUESprécieux le dignitairePas encore d'évaluation
- 528 Etude Des Caractéristiques Mécaniques D'un Joint SoudéDocument87 pages528 Etude Des Caractéristiques Mécaniques D'un Joint Soudéyoucef khenchoulPas encore d'évaluation
- Rappel Euler BernoulliDocument27 pagesRappel Euler Bernoulliaithssainkhalid054Pas encore d'évaluation
- Construction Métallique3Document20 pagesConstruction Métallique3Talouth TourePas encore d'évaluation
- Meca Exam 2012Document5 pagesMeca Exam 2012Nam KolyaPas encore d'évaluation
- OSB - Work Mémoire LicenceDocument67 pagesOSB - Work Mémoire LicenceOint MIMBPas encore d'évaluation
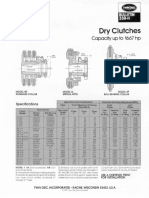
- Clutch 339 HDocument2 pagesClutch 339 Hvipequi50100% (1)
- Projet Fin Etude CorrigeéDocument83 pagesProjet Fin Etude CorrigeéHqm zqPas encore d'évaluation
- Solutions TD No.3 Exercice 1Document9 pagesSolutions TD No.3 Exercice 1pwremilyPas encore d'évaluation
- Cours 1Document18 pagesCours 1Robert PrincePas encore d'évaluation
- Matière: TECHNOLOGIE Devoir de Synthèse N°2: Automatique de Levage 1 Partie: Système CombinatoireDocument5 pagesMatière: TECHNOLOGIE Devoir de Synthèse N°2: Automatique de Levage 1 Partie: Système CombinatoireMarouen MekkiPas encore d'évaluation
- 8 - Catalogue Lindab Ventilation 2012-13 - Montage - Accessoires de Supportage, D'étanchéité Et D'isolationDocument20 pages8 - Catalogue Lindab Ventilation 2012-13 - Montage - Accessoires de Supportage, D'étanchéité Et D'isolationTOPASOPas encore d'évaluation
- Generalités Sur Les MécanismesDocument5 pagesGeneralités Sur Les MécanismesHouariPas encore d'évaluation
- BETON ARME - Chapitre 1et 2Document42 pagesBETON ARME - Chapitre 1et 2Qastali AbdeLlatifPas encore d'évaluation
- Cycle Combine 1 PDocument1 pageCycle Combine 1 PMohamed Soibaha ChaambanePas encore d'évaluation