Vous aimerez peut-être aussi
- TP N°1Document4 pagesTP N°1Marouane TaibiniPas encore d'évaluation
- Anatomie de L'oesophageDocument26 pagesAnatomie de L'oesophageilham bzikha33% (3)
- ISEMath 2018 CDocument20 pagesISEMath 2018 CFabrice EwoloPas encore d'évaluation
- Corrigé Du Partiel: Soient Et Deux Réels. Soit La Fonction Définie Par SiDocument6 pagesCorrigé Du Partiel: Soient Et Deux Réels. Soit La Fonction Définie Par SiFabrice Faboulouze MissidiPas encore d'évaluation
- Kholle 2 MP2corrigeDocument9 pagesKholle 2 MP2corrigemh2742004Pas encore d'évaluation
- Cours 1Document14 pagesCours 1Ako BeatsPas encore d'évaluation
- Algèbre - Résumé Applications LinéairesDocument5 pagesAlgèbre - Résumé Applications Linéairesyoussefselmi2004Pas encore d'évaluation
- DM7 CorrectionDocument8 pagesDM7 CorrectionPatrick NgakouPas encore d'évaluation
- Rechercher Sur Le Site..Document30 pagesRechercher Sur Le Site..Othniel MeignanPas encore d'évaluation
- Série de TD 1Document7 pagesSérie de TD 1zineb ElkhbiziPas encore d'évaluation
- 5 exorevfonctionMP2324Document2 pages5 exorevfonctionMP2324SoufianeMoustakbalPas encore d'évaluation
- ConvexiteDocument17 pagesConvexitelamsafPas encore d'évaluation
- 4 Cours LTI Maths1Document33 pages4 Cours LTI Maths1Michel OuedraogoPas encore d'évaluation
- Chap24 (Espaces Préhilbertiens Réels)Document14 pagesChap24 (Espaces Préhilbertiens Réels)Stanislas JubaultPas encore d'évaluation
- Solutions TD02 Applications LinéairesDocument13 pagesSolutions TD02 Applications LinéairesMaster MathPas encore d'évaluation
- Correction TD2 S2Document7 pagesCorrection TD2 S2Koffi Pierre D. KoumassiPas encore d'évaluation
- Applications Lin É AiresDocument10 pagesApplications Lin É AiresMehdi Ouben SaidPas encore d'évaluation
- Analyse de FourierDocument11 pagesAnalyse de FourierPrince BountsenguiPas encore d'évaluation
- A Rendre Le Samedi 12 Mars 2022: Evoir LibreDocument2 pagesA Rendre Le Samedi 12 Mars 2022: Evoir LibreFatinePas encore d'évaluation
- Math 1 MP2023 BisDocument4 pagesMath 1 MP2023 BisJalal ELMOTCHOUPas encore d'évaluation
- CCP 2011 MP M1Document4 pagesCCP 2011 MP M1Sara MarouchePas encore d'évaluation
- Correction Feuille 9 Continuite Et DerivabiliteDocument10 pagesCorrection Feuille 9 Continuite Et DerivabiliteMaryam MaryamPas encore d'évaluation
- Exocor App DiffDocument7 pagesExocor App DiffBocar DiongPas encore d'évaluation
- CHP 2 SMIDocument8 pagesCHP 2 SMIothmane hanaPas encore d'évaluation
- TD 16 Dimension FinieDocument3 pagesTD 16 Dimension FinieTarik El BarakaPas encore d'évaluation
- ISEMath 2018Document14 pagesISEMath 2018Fabrice EwoloPas encore d'évaluation
- Tous Les Sujets Corriges ISE Maths 2018 SujetsDocument34 pagesTous Les Sujets Corriges ISE Maths 2018 Sujetszokou bi joelPas encore d'évaluation
- Examen1 Algèbre 2 M-I 2023Document6 pagesExamen1 Algèbre 2 M-I 2023طائر الرخPas encore d'évaluation
- Applications Linéaires 1Document9 pagesApplications Linéaires 1ndeyemaremediongue7Pas encore d'évaluation
- TD 07 - Limites Et ContinuitéDocument4 pagesTD 07 - Limites Et Continuitéyassine elguasryPas encore d'évaluation
- ConvexDocument4 pagesConvexayoub8100% (1)
- PDFDocument18 pagesPDFBIKOLA FFPas encore d'évaluation
- Exo Calcul DifférentielDocument4 pagesExo Calcul DifférentielDylanPas encore d'évaluation
- Espaces Vectoriels D Eveloppements Limit Es: Corrig eDocument2 pagesEspaces Vectoriels D Eveloppements Limit Es: Corrig eYahya MazouariPas encore d'évaluation
- Analyse MathématiquesDocument105 pagesAnalyse MathématiquesAlizeta OUEDRAOGOPas encore d'évaluation
- Chapitre 2 Integration NumériqueDocument18 pagesChapitre 2 Integration NumériqueSarah BardiPas encore d'évaluation
- Chap 17Document8 pagesChap 17Jonathan wawehPas encore d'évaluation
- Fic 00083Document10 pagesFic 00083Sara GhazouaniPas encore d'évaluation
- 2017 ExamDocument5 pages2017 ExamSchalom KOUNEDEDJIPas encore d'évaluation
- Laplace MP 2023Document5 pagesLaplace MP 2023Younes EL BAHRAOUIPas encore d'évaluation
- Td01 Algebre CorrigeDocument12 pagesTd01 Algebre Corrigekhalfallah MohamedPas encore d'évaluation
- Integration Sur Un Segment ExercicesDocument2 pagesIntegration Sur Un Segment Exercicesالضحك حتى تصبح مضحكPas encore d'évaluation
- DerivabiliteDocument7 pagesDerivabiliteMar Yam SarhanePas encore d'évaluation
- DS8 - Cor VLDocument18 pagesDS8 - Cor VLthe ghostPas encore d'évaluation
- Cours Primitives Prep Int 2021Document7 pagesCours Primitives Prep Int 2021Zouari AmeniPas encore d'évaluation
- Cours Chapitre5 Intégration NumériqueDocument17 pagesCours Chapitre5 Intégration Numériquedz15dzPas encore d'évaluation
- Correction de TD2Document4 pagesCorrection de TD2Anouar MddPas encore d'évaluation
- Fic 00049Document6 pagesFic 00049jupitemma19Pas encore d'évaluation
- Serie 3Document2 pagesSerie 3Youssef ZghariPas encore d'évaluation
- TD1 Mat132 2023Document2 pagesTD1 Mat132 2023stoneariel491Pas encore d'évaluation
- Corriges Exercices de Revisions D Algebre LineaireDocument5 pagesCorriges Exercices de Revisions D Algebre Lineairepeace.oumaimaPas encore d'évaluation
- Cours - Math - Fonction Continue Et Strictement Monotone - Bac Technique (2013-2014) MR Salah Hannachi PDFDocument5 pagesCours - Math - Fonction Continue Et Strictement Monotone - Bac Technique (2013-2014) MR Salah Hannachi PDFعبد الحميدPas encore d'évaluation
- MMC Practice ExercisesDocument4 pagesMMC Practice ExercisescharidPas encore d'évaluation
- TD RiemannDocument2 pagesTD RiemannThierry Laarbi OmeyerPas encore d'évaluation
- Bac Blanc 3Document2 pagesBac Blanc 3Malek AwlaqiPas encore d'évaluation
- Fonctions UsuellesDocument14 pagesFonctions UsuellesAbdjalil AchehabPas encore d'évaluation
- Chap10 Primitives Equation DiffDocument9 pagesChap10 Primitives Equation DiffJoe OkoumouPas encore d'évaluation
- TD3 SolDocument10 pagesTD3 SolounallymedPas encore d'évaluation
- S1-Fonctions DerivablesDocument2 pagesS1-Fonctions DerivablesT3C GamingPas encore d'évaluation
- td5 - Calcul Differentie 17-18lDocument3 pagestd5 - Calcul Differentie 17-18lnzijohann2003Pas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Correction de L'exerciceDocument2 pagesCorrection de L'exerciceYoussefyassinPas encore d'évaluation
- Chapitre 3 Méthode Du Simplexe: Université Hassan II de Casablanca FSJES Ain Sebaa LF Mass - S4 Pr. Abderrahim KADIRIDocument58 pagesChapitre 3 Méthode Du Simplexe: Université Hassan II de Casablanca FSJES Ain Sebaa LF Mass - S4 Pr. Abderrahim KADIRIYoussefyassinPas encore d'évaluation
- Examen BlancDocument5 pagesExamen BlancYoussefyassinPas encore d'évaluation
- TD - Intérêts Composés 2019-2020Document1 pageTD - Intérêts Composés 2019-2020YoussefyassinPas encore d'évaluation
- Ain Chok FsjesDocument1 pageAin Chok FsjesYoussefyassinPas encore d'évaluation
- Guide Installation OctaveDocument7 pagesGuide Installation OctaveYoussefyassinPas encore d'évaluation
- TD AnnuitésDocument1 pageTD AnnuitésYoussefyassinPas encore d'évaluation
- CHP 3Document7 pagesCHP 3YoussefyassinPas encore d'évaluation
- Exercice 1Document1 pageExercice 1YoussefyassinPas encore d'évaluation
- TD2 - S2 - Inérets Simples 2019-2020 PDFDocument2 pagesTD2 - S2 - Inérets Simples 2019-2020 PDFYoussefyassinPas encore d'évaluation
- Correction AnnuitéDocument3 pagesCorrection AnnuitéYoussefyassinPas encore d'évaluation
- Correction - TD - Gestion de Portefeuille Des Actifs FinanciersDocument35 pagesCorrection - TD - Gestion de Portefeuille Des Actifs FinanciersYoussefyassinPas encore d'évaluation
- TD 1 - Décision - InvestissementDocument2 pagesTD 1 - Décision - InvestissementYoussefyassinPas encore d'évaluation
- Actuariat Vie - Intervention 1Document29 pagesActuariat Vie - Intervention 1YoussefyassinPas encore d'évaluation
- DocDocument7 pagesDocYoussefyassinPas encore d'évaluation
- Table Des Matières: 1 L'espace Vectoriel R 2Document12 pagesTable Des Matières: 1 L'espace Vectoriel R 2YoussefyassinPas encore d'évaluation
- Note RDocument2 pagesNote RYoussefyassinPas encore d'évaluation
- Les Risques Assurance 5Document15 pagesLes Risques Assurance 5YoussefyassinPas encore d'évaluation
- Rapport D Activité 2018Document52 pagesRapport D Activité 2018YoussefyassinPas encore d'évaluation
- L'assurance VieDocument9 pagesL'assurance VieYoussefyassinPas encore d'évaluation
- TD N°1 de L'assurance Non-VieDocument2 pagesTD N°1 de L'assurance Non-VieYoussefyassinPas encore d'évaluation
- Gestion Du Risque Actuariel - Chapitre - 3 - Partie1Document9 pagesGestion Du Risque Actuariel - Chapitre - 3 - Partie1YoussefyassinPas encore d'évaluation
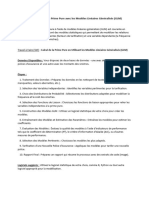
- TP - Modélisation de La Prime Pure Avec Les Modèles Linéaires GénéralisésDocument1 pageTP - Modélisation de La Prime Pure Avec Les Modèles Linéaires GénéralisésYoussefyassinPas encore d'évaluation
- Chapitre 4. Notion de Provision MathématiqueDocument11 pagesChapitre 4. Notion de Provision MathématiqueYoussefyassinPas encore d'évaluation
- Educationdidactique 7776Document31 pagesEducationdidactique 7776YoussefyassinPas encore d'évaluation
- Gestions de PortefeuilleDocument21 pagesGestions de PortefeuilleYoussefyassinPas encore d'évaluation
- DCHTFVVDocument30 pagesDCHTFVVYoussefyassinPas encore d'évaluation
- Construction D'une MaisonDocument2 pagesConstruction D'une MaisonYoussefyassinPas encore d'évaluation
- Corrigé Du TD #3 D'assurance VieDocument3 pagesCorrigé Du TD #3 D'assurance VieYoussefyassin100% (1)
- Analyse Des Séries ChronologiquesDocument34 pagesAnalyse Des Séries ChronologiquesYoussefyassinPas encore d'évaluation
- Crédit ManagementDocument25 pagesCrédit Managementjosuedassi1Pas encore d'évaluation
- Le Guide de La Gestion de CriseDocument17 pagesLe Guide de La Gestion de CriseThierry KOUAME100% (3)
- Naples BOUCHIBA Farid Ibadism Napoli 1Document32 pagesNaples BOUCHIBA Farid Ibadism Napoli 1Ayman UchihaPas encore d'évaluation
- Systeme 2DDLDocument25 pagesSysteme 2DDLSamado Tips46Pas encore d'évaluation
- Chapitre 1Document31 pagesChapitre 1Chahid ChokoutPas encore d'évaluation
- Contrat Type PPPDocument69 pagesContrat Type PPPDecour Paul-JeanPas encore d'évaluation
- Cook Expert Magimix 10 RecettesDocument20 pagesCook Expert Magimix 10 RecettesdilonPas encore d'évaluation
- CE1 Anglais Lets Travel To Australia CompressedDocument11 pagesCE1 Anglais Lets Travel To Australia CompressedFifi liloPas encore d'évaluation
- Evaluation SommativeDocument14 pagesEvaluation SommativeAnonymous wzl1VpDoz6Pas encore d'évaluation
- Devis de Construction Du Bureau AvenueDocument5 pagesDevis de Construction Du Bureau AvenueDivin IkundjiPas encore d'évaluation
- Sanda Rituels de Gurison Par Les Archanges PDFDocument23 pagesSanda Rituels de Gurison Par Les Archanges PDFEric MerlinPas encore d'évaluation
- DEPLIANT 16e SOCAPED COMPLET 02092022Document4 pagesDEPLIANT 16e SOCAPED COMPLET 02092022SamuelPas encore d'évaluation
- Jeu 3 UPEC S4 Examen Semestriel Cardio-Neuro-Digestif Aout 2011Document2 pagesJeu 3 UPEC S4 Examen Semestriel Cardio-Neuro-Digestif Aout 2011safemindPas encore d'évaluation
- Guide Juridique PDFDocument754 pagesGuide Juridique PDFMariem AssafiPas encore d'évaluation
- Guide de Massage Lomi-LomiDocument3 pagesGuide de Massage Lomi-Lomibittencourt.caroline108Pas encore d'évaluation
- TP 1-1Document3 pagesTP 1-1ammarfatimazohra6Pas encore d'évaluation
- LeFa, GéomancieAfricainePDF 1712184199545Document37 pagesLeFa, GéomancieAfricainePDF 1712184199545Bachir Maman MoustaphaPas encore d'évaluation
- Delonghi Ec695Document18 pagesDelonghi Ec695Kaddouri KaddaPas encore d'évaluation
- Gestion de ProcessusDocument4 pagesGestion de ProcessusMomedPas encore d'évaluation
- Vini Oral BTSDocument14 pagesVini Oral BTSheiariiverPas encore d'évaluation
- Cours de Digital Control SystemsDocument172 pagesCours de Digital Control SystemsarcPas encore d'évaluation
- Réflexion Et Réfraction Notions À RetenirDocument14 pagesRéflexion Et Réfraction Notions À Retenirsarra takfaouiPas encore d'évaluation
- Prevision Et Suivi Des Depenses Du Maitre D'ouvrage PDFDocument9 pagesPrevision Et Suivi Des Depenses Du Maitre D'ouvrage PDFPower TimePas encore d'évaluation
- Comptabilite Generale Partie IDocument32 pagesComptabilite Generale Partie IYEBOU jeremiePas encore d'évaluation
- GRAM Mardi 31 COD COI Et Pronoms Perso Compléments ConvertiDocument2 pagesGRAM Mardi 31 COD COI Et Pronoms Perso Compléments ConvertiAbanoubPas encore d'évaluation
- Krigeage DualDocument5 pagesKrigeage DualkaderPas encore d'évaluation
- Master TOX1 PDFDocument17 pagesMaster TOX1 PDFSidahmed MilPas encore d'évaluation
- Cas Pratique 1 Final - ÉnoncéDocument6 pagesCas Pratique 1 Final - ÉnoncéAmina KirechePas encore d'évaluation