Vous aimerez peut-être aussi
- Chap 6 - Calcul Vectoriel Et Produit ScalaireDocument5 pagesChap 6 - Calcul Vectoriel Et Produit ScalaireOlivia fnsPas encore d'évaluation
- T 22 OrthogonaliteDocument3 pagesT 22 OrthogonaliteidPas encore d'évaluation
- 1S2 CoursbarycentresDocument5 pages1S2 CoursbarycentresAbderrahmane BekhtiPas encore d'évaluation
- Geometrie Du PlanDocument40 pagesGeometrie Du PlanMultiple ContentPas encore d'évaluation
- Vecteurs de L Espace Cours FR 2Document3 pagesVecteurs de L Espace Cours FR 2Hiba LemnouarPas encore d'évaluation
- Cours Vecteur Et Produit ScalaireDocument14 pagesCours Vecteur Et Produit Scalairearthur.brun12Pas encore d'évaluation
- Cours Sur Les VecteursDocument4 pagesCours Sur Les Vecteursscalibur1Pas encore d'évaluation
- Calcul Vectoriel EspaceDocument9 pagesCalcul Vectoriel EspaceEmmanuel leoPas encore d'évaluation
- Web Page-5Document4 pagesWeb Page-5chloe07penaPas encore d'évaluation
- Produit Scalaire DefDocument4 pagesProduit Scalaire DefAymen MerabtiPas encore d'évaluation
- Calculs Vectoriels Et BarycentreDocument11 pagesCalculs Vectoriels Et BarycentreLycée sathoud fasucePas encore d'évaluation
- TD Electrostatique INSADocument20 pagesTD Electrostatique INSAPFEPas encore d'évaluation
- TD Vecteurs TorseurDocument2 pagesTD Vecteurs Torseurmoise moyePas encore d'évaluation
- 1594879511Document16 pages1594879511achrafPas encore d'évaluation
- Chap 3Document38 pagesChap 3jhjjjjPas encore d'évaluation
- Fiche 7-CoursDocument11 pagesFiche 7-CoursMaxime AkakpoPas encore d'évaluation
- Produit Scalaire Dans LespaceDocument3 pagesProduit Scalaire Dans Lespaceapi-302372012Pas encore d'évaluation
- Outils Mathématiques Pour La Physique - RousselDocument25 pagesOutils Mathématiques Pour La Physique - RousselAli NouriPas encore d'évaluation
- Vecteurs Et Opérations FEDocument3 pagesVecteurs Et Opérations FESacha BellaïchePas encore d'évaluation
- Cours Du Produit Scalaire 2bac PCDocument11 pagesCours Du Produit Scalaire 2bac PCapi-302372012Pas encore d'évaluation
- GeomDocument28 pagesGeomIlyasse LemezaliPas encore d'évaluation
- Geometrie-Plane 2Document1 pageGeometrie-Plane 2Zouber AzamPas encore d'évaluation
- Chapitre 1Document8 pagesChapitre 1stop وقفPas encore d'évaluation
- Chapitre Complexes Et GeometrieDocument43 pagesChapitre Complexes Et GeometrieDimitris KapetanakisPas encore d'évaluation
- Polycop 1TD de Mécanique - isauBTP-Architecture 2021Document3 pagesPolycop 1TD de Mécanique - isauBTP-Architecture 2021landrytgvPas encore d'évaluation
- Chapitre IDocument20 pagesChapitre IUrsule YaméogoPas encore d'évaluation
- Rennes Mathelem Juin 1967Document2 pagesRennes Mathelem Juin 1967PRESTY FRANSTHENE KoumbaPas encore d'évaluation
- Vecteurs Et TranslationDocument5 pagesVecteurs Et TranslationHalima SaouiPas encore d'évaluation
- Synthèse Vecteur Et Produit ScalaireDocument3 pagesSynthèse Vecteur Et Produit Scalairearthur.brun12Pas encore d'évaluation
- 03-1 Modélisation Cinématique - Etude Géométrique - Cours PDFDocument16 pages03-1 Modélisation Cinématique - Etude Géométrique - Cours PDFKim JkPas encore d'évaluation
- VecteursDocument1 pageVecteursJulien SeguretPas encore d'évaluation
- 03-1 Modélisation Cinématique - Etude Géométrique - Cours-1Document16 pages03-1 Modélisation Cinématique - Etude Géométrique - Cours-1Adonaï SOLANGA KIASALATATAPas encore d'évaluation
- Travaux Dirig ES: Exercice 1Document2 pagesTravaux Dirig ES: Exercice 1Ÿøüs SëfPas encore d'évaluation
- Vect 2Document4 pagesVect 2sanders traorePas encore d'évaluation
- Produit ScalaireDocument3 pagesProduit ScalaireZouber AzamPas encore d'évaluation
- Chapitre 1 Rappels Danalyse Vectorielle 2023Document47 pagesChapitre 1 Rappels Danalyse Vectorielle 2023القرآن الكريمPas encore d'évaluation
- Le Produit Scalaire Cours FR 2Document4 pagesLe Produit Scalaire Cours FR 2الايوبي اسماعيلPas encore d'évaluation
- FRESNELDocument6 pagesFRESNELAbdesslam GuennouniPas encore d'évaluation
- Vecteurs Et Droites Du Plan: I RappelsDocument5 pagesVecteurs Et Droites Du Plan: I RappelsYohann BellayerPas encore d'évaluation
- VecteursDocument4 pagesVecteursDjamel BoutagougaPas encore d'évaluation
- Cours PDFDocument6 pagesCours PDFSaid NaimPas encore d'évaluation
- DL 04Document4 pagesDL 04mmPas encore d'évaluation
- Ste303 4Document4 pagesSte303 4boutana walidPas encore d'évaluation
- MTH 227 - 022602-1Document50 pagesMTH 227 - 022602-1Tino AyiPas encore d'évaluation
- Chap08 1011Document16 pagesChap08 1011imadPas encore d'évaluation
- Cours Barycentre Et Produit ScalaireDocument1 pageCours Barycentre Et Produit Scalairefrank sopPas encore d'évaluation
- Sol NB Complexes Geom 2018Document4 pagesSol NB Complexes Geom 2018marc.lagier2Pas encore d'évaluation
- Vecteurs - TranslationsDocument12 pagesVecteurs - TranslationsrossfelderPas encore d'évaluation
- Web Page-6Document6 pagesWeb Page-6chloe07penaPas encore d'évaluation
- Ch09 - Produit ScalaireDocument2 pagesCh09 - Produit ScalaireManseriPas encore d'évaluation
- Calcul Vectoriel 21: Opérations Sur Les VecteursDocument23 pagesCalcul Vectoriel 21: Opérations Sur Les VecteursIgnace BagrePas encore d'évaluation
- Fiche Methodes Geometrie Dans LespaceDocument6 pagesFiche Methodes Geometrie Dans LespaceAbdstar IssawiPas encore d'évaluation
- Outils Mathématique Pour La PhysiqueDocument12 pagesOutils Mathématique Pour La PhysiqueYassine Ben saadPas encore d'évaluation
- Ma 6 Aschap 6Document12 pagesMa 6 Aschap 6Hassen JinyorPas encore d'évaluation
- Chap 4 Nombres Complexes Geometrie PDFDocument8 pagesChap 4 Nombres Complexes Geometrie PDFAmen RouissiPas encore d'évaluation
- Vecteurs AlgébriquesDocument36 pagesVecteurs Algébriquesali BourenanePas encore d'évaluation
- Exo M閏anique Du PointDocument4 pagesExo M閏anique Du PointLoundou ortegaPas encore d'évaluation
- M12 - Principes de Moteurs Et de Génératrices À C.C. GE-EEIDocument86 pagesM12 - Principes de Moteurs Et de Génératrices À C.C. GE-EEIYoussef SadikPas encore d'évaluation
- Presentation Domo Enr2015Document2 pagesPresentation Domo Enr2015Youssef SadikPas encore d'évaluation
- Demande InscriptionDocument1 pageDemande InscriptionYoussef SadikPas encore d'évaluation
- TP1 CorrectionDocument4 pagesTP1 CorrectionYoussef SadikPas encore d'évaluation
- 1tronconneuse - Automatique ImpDocument8 pages1tronconneuse - Automatique ImpYoussef SadikPas encore d'évaluation
- Approche Interne de L'analyse FonctionnelleDocument6 pagesApproche Interne de L'analyse FonctionnelleYoussef SadikPas encore d'évaluation
- M04 - Traçage de Croquis Et de Schémas GE-EEIDocument127 pagesM04 - Traçage de Croquis Et de Schémas GE-EEIYoussef SadikPas encore d'évaluation
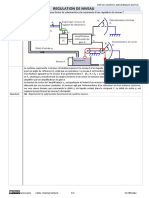
- Regulation NiveauDocument1 pageRegulation NiveauYoussef SadikPas encore d'évaluation
- Approche Externe de L'analyse Fonctionnelle: Etude Des Différents Systèmes de CommandeDocument5 pagesApproche Externe de L'analyse Fonctionnelle: Etude Des Différents Systèmes de CommandeYoussef SadikPas encore d'évaluation
- 502af904572be-Polycop Electro-Filtrage - 2012 - CompteDocument35 pages502af904572be-Polycop Electro-Filtrage - 2012 - CompteYoussef SadikPas encore d'évaluation
- Crs dc04 AcuDocument4 pagesCrs dc04 AcuYoussef SadikPas encore d'évaluation
- Resume STS1 01 Electricite GeneraleDocument6 pagesResume STS1 01 Electricite GeneraleYoussef SadikPas encore d'évaluation
- ELE1300 JCours 07Document24 pagesELE1300 JCours 07Youssef SadikPas encore d'évaluation
- 144 Tdautomatique Tsi SpeDocument4 pages144 Tdautomatique Tsi SpeYoussef SadikPas encore d'évaluation
- TD FiltresDocument10 pagesTD FiltresYoussef SadikPas encore d'évaluation
- Fiche de Cours Régime SinusoïdalDocument2 pagesFiche de Cours Régime SinusoïdalYoussef SadikPas encore d'évaluation
- Problème: Etude D'un TeslamètreDocument3 pagesProblème: Etude D'un TeslamètreYoussef SadikPas encore d'évaluation
- BAC 2013 Sciences de Lingénieur SMBDocument18 pagesBAC 2013 Sciences de Lingénieur SMBYoussef SadikPas encore d'évaluation
- Cours VHDLDocument32 pagesCours VHDLYoussef SadikPas encore d'évaluation
- PLDsDocument6 pagesPLDsYoussef SadikPas encore d'évaluation
- ch01 Logique - Com1Document6 pagesch01 Logique - Com1Youssef SadikPas encore d'évaluation
- TD FiltresDocument10 pagesTD FiltresYoussef SadikPas encore d'évaluation
- Transf CorrigéDocument8 pagesTransf CorrigéYoussef SadikPas encore d'évaluation
- Transfo Mono Colbert PDFDocument9 pagesTransfo Mono Colbert PDFYoussef SadikPas encore d'évaluation
- 2306 - Layout 2Document12 pages2306 - Layout 2GRADUATEPas encore d'évaluation
- RésuméDocument26 pagesRésumésousanaskiPas encore d'évaluation
- Automatique COURSDocument5 pagesAutomatique COURSToto Le boPas encore d'évaluation
- TD4 Electronique Numérique DIC1Document3 pagesTD4 Electronique Numérique DIC1Jacques GregoirePas encore d'évaluation
- kh1092 FRDocument5 pageskh1092 FRAkim LatifouPas encore d'évaluation
- Comparaison Sujet de DissertationDocument8 pagesComparaison Sujet de DissertationBaPas encore d'évaluation
- Abraham Aboulafia - Le Livre Du SigneDocument59 pagesAbraham Aboulafia - Le Livre Du SigneAmparoPas encore d'évaluation
- TEP SubatomiqueDocument56 pagesTEP SubatomiqueKhalid GarbaPas encore d'évaluation
- Oraux ' A L' Ecole Polytechnique: 1 Oraux de Math EmatiquesDocument3 pagesOraux ' A L' Ecole Polytechnique: 1 Oraux de Math EmatiquesSamia KarroumiPas encore d'évaluation
- TP 4: Intégration Numérique: Exercice 1Document5 pagesTP 4: Intégration Numérique: Exercice 1FATIMA ZAHRAE EZZEJJARIPas encore d'évaluation
- ÜüüüDocument2 pagesÜüüüRamboAkkkoPas encore d'évaluation
- Correspondance Avec Vasile Lovinescu, René Guénon - 19 Mai 1935Document2 pagesCorrespondance Avec Vasile Lovinescu, René Guénon - 19 Mai 1935WadoudPas encore d'évaluation
- La Banque Crédit Agricole Est LDocument2 pagesLa Banque Crédit Agricole Est LHanan KHEZOUPas encore d'évaluation
- Gestion CoutsDocument13 pagesGestion Coutskyle_namgal1679Pas encore d'évaluation
- Révision Unité 1 Et 2Document2 pagesRévision Unité 1 Et 2Sol Study gramPas encore d'évaluation
- DCG 6 FinanceDocument156 pagesDCG 6 FinanceRamanamanjato Nah100% (5)
- GastroDocument15 pagesGastroNy Antra RazafimanantsoaPas encore d'évaluation
- CARDIO CollegeDocument645 pagesCARDIO CollegeLouis GhoPas encore d'évaluation
- Kristeva - L'Engendrement de La FormuleDocument5 pagesKristeva - L'Engendrement de La FormuleamicusphilologiaePas encore d'évaluation
- A Une Passante AnalyseDocument3 pagesA Une Passante Analysezarouk.anass.comPas encore d'évaluation
- Plan de Cours FLE-1141Document8 pagesPlan de Cours FLE-1141عبد الحميد الجزائريPas encore d'évaluation
- Ccna2 Module 11Document34 pagesCcna2 Module 11Be Happy - كن سعيداPas encore d'évaluation