REPUBLIQUE TUNISIENNE Devoir de contrôle N°3
MINISTERE DE L’EDUCATION : Epreuve : Section
Technologie Sciences Techniques
Lycée: oasis chenini
Durée : 2h Mécanique
STATION DE PEINTURE DE CABINES
1. Présentation
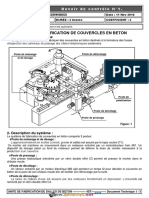
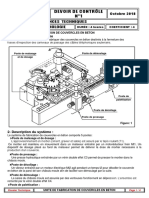
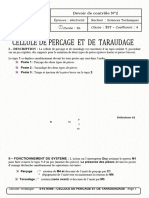
Dans une usine de fabrication de camions, la station de peinture (figure 1) est destinée à peindre
les cabines. Elle est composée essentiellement d’un convoyeur et de trois robots sur lesquels sont
montés des pulvérisateurs pour peindre les côtés et le toit de la cabine.
z
y
Pulvérisateurs de
peinture (PLV2)
Pulvérisateurs de x
peinture (PLV1)
S2 Convoyeur
Robot latéral
S1
Robot de toit
Cabine
Robot
latéral
Capteur Figure 1
Infrarouge
Chacun des deux robotslatéraux est muni de trois mouvements permettant au pulvérisateur
correspondant de suivre le profil exact de la cabine (figure 2). Ces mouvements sont:
- Une translation horizontale suivant l’axe X : course utile x = 400mm. Le déplacement en
translation du pulvérisateur (PLV1) suivant l'axe X est assuré par un système pignon crémaillère ;
- Une translation verticale suivant l’axe Z : course utile z = 2700mm. Le déplacement en translation
du pulvérisateur (PLV1) suivant l'axe Z est assuré par un système poulies courroie ;
- Unpivotement du pulvérisateur d’un angle α autour de l’axe Y d’amplitude-45°≤α≤+45°.
Le robot de peinture de toit (figure 2) permet au pulvérisateur (PLV2) un pivotement autour de l’axe
X d’un angle d’oscillation réglé entre deux valeurs extrêmesde 45° et 140° imposées par le cahier
des charges fonctionnel.
Dossier technique STATION DE PEINTURE DE CABINES Page 1/4
Robot de toit
Oscillation Moteur M4 + mécanisme de pivotement de PLV
PLV2
Axe du moteur de pivotement MP
Axe du moteur M2
PLV1
Pivotement
Cabine
Translation suivant X
Z
Translation suivant Z
X
Y
Robot latéral Axe du moteur M3
Schéma cinématique de la station de peinture (Figure 2)
)
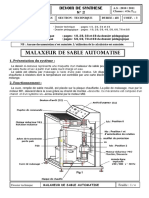
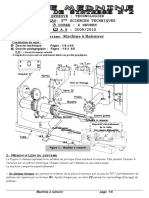
1.1. Fonctionnement du robot de toit
Le mécanisme du robot, représenté en 3D ci-dessous et sur le dessin d’ensemble du dossier
technique, transforme le mouvement de rotation continu du moteur électrique M4 (Pm=3Kwatt) en
un mouvement oscillant (rotation alternative) de l’axe (31)porte pulvérisateur (PLV2).
Le mouvement de rotation de l’arbre d’entrée (44) est transformé en mouvement de translation
alternative de la bielle à portée sphérique (21) à l’aide d’un système bielle manivelle (44+38,28).
Le mouvement d’oscillation de l’axe de sortie (31) d’un angle est assuré par un système bielle et
excentrique (18, 16,14 et 36). L’axe excentré (14) est monté serrer dans le plateau (36).
Il est possible de régler l’angle d’oscillation du pulvérisateur (PLV2) en variant l’excentrique «E»
par le déplacement du doigt de réglage (38) par rapport à (44).
6 2
37
13 31 1 44
Dossier technique STATION DE PEINTURE DE CABINES Page 2/4
2. Nomenclature
Re Matière
Nb DESIGNATION
p
1 1 Carter inférieur fixe Al Si 13
2 1 Carter supérieur pivotant Al Si 13
3 2 Ecrou hexagonal ISO 4032 - M10
4 1 Rondelle plate ISO 10673 – Type N - 10
5 1 Axe fileté à tête fendu
6 1 Plat de fermeture S 235
7 7 Rondelle plate ISO 10673 – Type N - 5
8 1 Bride de liaison support coussinets Al Cu 4 Mg Si
9 1 Bride de liaison gauche Al Cu 4 Mg Si
10 2 Coussinet Cu Sn 12 P
11 1 Tube carter
12 1 Bride de liaison droite Al Cu 4 Mg Si
13 1 Carter cylindrique
14 1 Axe excentré
15 4 Vis à tête cylindrique à six pans creux ISO 4762 - M5-50
16 1 Chape mâle C 45
17 2 Goupille cylindrique ISO 8734 - 2x16
18 1 Bielle rotule C 45
19 1 Cale de réglage
20 1 Fermeture rotule
21 1 Bielle à portée sphérique
22 3 Vis à tête cylindrique à six pans creux ISO 4762 - M5-30
23 1 Goupille cylindrique ISO 8734 - 3x30
24 1 Chape femelle C 45
25 1 Axe de chape
26 1 Anneau élastique pour arbre, 4 x 0,4
27 2 Coussinet à collerette Cu Sn 12 P
28 1 Bielle C 45
29 3 Vis à tête cylindrique à six pans creux ISO 4762 - M5-18
30 1 Axe d'articulation
31 1 Axe de sortie 100 Cr 6
32 1 Support d'axe de sortie C 45
33 1 Ecrou hexagonal ISO 4032 - M24
34 1 Rondelle plate ISO 10673 – Type S - 24
35 2 Coussinet à collerette Cu Sn 12 P
36 1 Plateau support excentrique
37 1 Vis à tête moletée
38 1 Doigt de réglage C 22
39 1 Coussinet Cu Sn 12 P
40 1 Entretoise
41 2 Anneau élastique pour arbre, 6 x 0,7
42 1 Anneau élastique pour alésage, 32 x 1,5
43 1 Anneau élastique pour arbre, 12 x 1
44 1 Arbre d’entrée 100 Cr 6
45 2 Roulement à une rangée de billes à contact radial
46 1 Support roulements Al Cu 4 Mg Si
Dossier technique STATION DE PEINTURE DE CABINES Page 3/4
Dossier technique STATION DE PEINTURE DE CABINES Page 4/4
Page 4/4
Vous aimerez peut-être aussi
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFAdil El AzzouziPas encore d'évaluation
- dcn3 3t2 Dispositif D Entrainement CorrectionDocument4 pagesdcn3 3t2 Dispositif D Entrainement CorrectionGuiliass100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenKämîŁyä Nádïta100% (1)
- ISO 10006-Management de ProjetDocument32 pagesISO 10006-Management de ProjetBadro ELwahraniPas encore d'évaluation
- Dessin D'ensembleDocument9 pagesDessin D'ensembleBouabdellaoui saif ennasr100% (1)
- 2cahiermeca4stpart1 PDFDocument74 pages2cahiermeca4stpart1 PDFMrnadhir MecaniquePas encore d'évaluation
- Cours PPT LogistiqueDocument47 pagesCours PPT LogistiquejackdijaPas encore d'évaluation
- Devoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument14 pagesDevoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFYosra Flh100% (2)
- Lecture D'un Dessin D'ensemble (Correction)Document4 pagesLecture D'un Dessin D'ensemble (Correction)Kereme JulienPas encore d'évaluation
- TD3 CorDocument2 pagesTD3 Corsaida100% (2)
- EN ISO 14031 (2021) (F) CodifiedDocument8 pagesEN ISO 14031 (2021) (F) CodifiedNORM CONSULTINGPas encore d'évaluation
- DT 1Document4 pagesDT 1Hassine AliPas encore d'évaluation
- SKILLS Elements Composes ComprimesDocument82 pagesSKILLS Elements Composes ComprimesaliPas encore d'évaluation
- 4 SC Tech-dt-11-12-Systeme Automatique de MoulageDocument3 pages4 SC Tech-dt-11-12-Systeme Automatique de MoulageezzinePas encore d'évaluation
- Devoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFDocument15 pagesDevoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFmohamed1101Pas encore d'évaluation
- Devoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Document7 pagesDevoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Youssef CherniPas encore d'évaluation
- Poste Automatique de Peinture de Paraboles1Document5 pagesPoste Automatique de Peinture de Paraboles1Badreddine KraiemPas encore d'évaluation
- Dossier TechniquexDocument3 pagesDossier TechniquexezzinePas encore d'évaluation
- Dossier TechniquexDocument3 pagesDossier TechniquexezzinePas encore d'évaluation
- DT DC3 FinaleDocument6 pagesDT DC3 FinaleChaabane BOUALIPas encore d'évaluation
- Devoir de Controle N°2Document8 pagesDevoir de Controle N°2yves100% (2)
- 06 Trancheur MecaDocument10 pages06 Trancheur MecaYahya AIDARAPas encore d'évaluation
- Devoir Corrigé de Synthèse N°3 - Génie Mécanique Unité Flexible D'usinage - Bac Technique (2011-2012) MR Ben Abdallah Marouan - 2Document15 pagesDevoir Corrigé de Synthèse N°3 - Génie Mécanique Unité Flexible D'usinage - Bac Technique (2011-2012) MR Ben Abdallah Marouan - 2Bouabdellaoui saif ennasrPas encore d'évaluation
- Poste Automatique de Cisaillage de BarresDocument10 pagesPoste Automatique de Cisaillage de Barresوسيم زعفوريPas encore d'évaluation
- bts2009 TecDocument7 pagesbts2009 TecMakrem CherifPas encore d'évaluation
- Support Sujets GIM S3Document9 pagesSupport Sujets GIM S3Thierry BoulayPas encore d'évaluation
- Chapitre 3 Guidage Mai 2020Document33 pagesChapitre 3 Guidage Mai 2020Loic ReyesPas encore d'évaluation
- Expression Du Besoin D'un Guidage: Schémas D'une Liaison PivotDocument9 pagesExpression Du Besoin D'un Guidage: Schémas D'une Liaison PivotntayoubPas encore d'évaluation
- 228460P02 PDFDocument159 pages228460P02 PDFsldwPas encore d'évaluation
- ds1 0506 PDFDocument14 pagesds1 0506 PDFzaouia ayoubPas encore d'évaluation
- Devoir de Synthèse N°3 2010 2011 (Hazel T)Document9 pagesDevoir de Synthèse N°3 2010 2011 (Hazel T)Kereme JulienPas encore d'évaluation
- Devoir de Synthèse N°3 - Technologie - Bac Technique (2010-2011) MR Hazel-TDocument9 pagesDevoir de Synthèse N°3 - Technologie - Bac Technique (2010-2011) MR Hazel-TKhalil BkekriPas encore d'évaluation
- Capteur Fin de Course PneumatiqueDocument25 pagesCapteur Fin de Course PneumatiqueSERRAI Salah eddinePas encore d'évaluation
- Système Automatique de Découpage - Perçage: TechnologieDocument6 pagesSystème Automatique de Découpage - Perçage: TechnologieChaabane BOUALIPas encore d'évaluation
- Correction Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021Document5 pagesCorrection Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021aliPas encore d'évaluation
- DS3 4ST 0809 DT GR Kairouan Unite DusinageDocument5 pagesDS3 4ST 0809 DT GR Kairouan Unite DusinageArwa Berrich0% (1)
- Cours TransmissionDocument11 pagesCours TransmissionezzinePas encore d'évaluation
- Aii TP FF 2012Document144 pagesAii TP FF 2012Free FairePas encore d'évaluation
- Encaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeDocument4 pagesEncaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeTaieb BentaherPas encore d'évaluation
- Sujet 16 - LogoDocument6 pagesSujet 16 - Logohousinmechani1Pas encore d'évaluation
- DS3 REG 2006 2007fini (DT)Document6 pagesDS3 REG 2006 2007fini (DT)Moh BraberPas encore d'évaluation
- TD Percage de PieceDocument5 pagesTD Percage de Piecevalou cnPas encore d'évaluation
- Le Montage D'usinage Corrigé PDFDocument4 pagesLe Montage D'usinage Corrigé PDFD. n50% (2)
- Malaxeur de Sable AutomatiseDocument9 pagesMalaxeur de Sable AutomatiseHamada HamadaPas encore d'évaluation
- FERME TYPE HOWE Corrige PDFDocument3 pagesFERME TYPE HOWE Corrige PDFMounder Lsm100% (1)
- Cours Tournage PDFDocument10 pagesCours Tournage PDFOumeima ChaoualiPas encore d'évaluation
- DeoirDocument6 pagesDeoirbasmaPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZDocument4 pagesDevoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZsuiton fzPas encore d'évaluation
- Dev3 - Shema Bac F3Document3 pagesDev3 - Shema Bac F3Daouda OUEDRAOGOPas encore d'évaluation
- DT DC2 3ST 23 24Document3 pagesDT DC2 3ST 23 24Badreddine KraiemPas encore d'évaluation
- Correction dc2 1as 2022Document3 pagesCorrection dc2 1as 2022Karim AmmiPas encore d'évaluation
- Devoir de Controle n1 Bac MecaniqueDocument3 pagesDevoir de Controle n1 Bac Mecaniqueأحمد رائد الفضاءPas encore d'évaluation
- MTA DocumentationDocument9 pagesMTA DocumentationsaidloubarPas encore d'évaluation
- Corrigé TD1 TRSF de MVTDocument5 pagesCorrigé TD1 TRSF de MVTأشرف عبودPas encore d'évaluation
- Devoir+synt 3SCTech 2010Document8 pagesDevoir+synt 3SCTech 2010Bouabdellaoui saif ennasr100% (1)
- TD TmoemDocument12 pagesTD TmoemAhmed GhribiPas encore d'évaluation
- Dossier TechniqueDocument4 pagesDossier TechniqueNejib JallouliPas encore d'évaluation
- DC3 4ScT (09-10)Document9 pagesDC3 4ScT (09-10)Wagih MrassiPas encore d'évaluation
- TD Percage de PieceDocument3 pagesTD Percage de PieceIlyes BeyPas encore d'évaluation
- Devoir 3 Si 2 Bac STM Tri de CaisseDocument11 pagesDevoir 3 Si 2 Bac STM Tri de CaisseHajar Ben GaraâPas encore d'évaluation
- Forod 2bac Si STM s1 3Document17 pagesForod 2bac Si STM s1 3Ben abd el jalil AyoubPas encore d'évaluation
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- Manuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013D'EverandManuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Infographie bidimensionnelle: Explorer le domaine visuel : l'infographie bidimensionnelle en vision par ordinateurD'EverandInfographie bidimensionnelle: Explorer le domaine visuel : l'infographie bidimensionnelle en vision par ordinateurPas encore d'évaluation
- Soupapes FicheDocument2 pagesSoupapes Fichelaetitia Zambou100% (1)
- Vos ContratsDocument68 pagesVos ContratsFlora VilpontPas encore d'évaluation
- Kia XCeed Zubehoer FDocument11 pagesKia XCeed Zubehoer Fmarco gomesPas encore d'évaluation
- TP Routage StatiqueDocument7 pagesTP Routage StatiquediedhiouPas encore d'évaluation
- Architecture Des Ordinateurs8interruptionsDocument31 pagesArchitecture Des Ordinateurs8interruptionsOumaima ZiatPas encore d'évaluation
- ConvocationDocument3 pagesConvocationloukoumartial4Pas encore d'évaluation
- MEHARI Principes Fondamentaux Et Spécifications Fonctionnelles by Club de La Sécurité de L'information Du QuébecDocument46 pagesMEHARI Principes Fondamentaux Et Spécifications Fonctionnelles by Club de La Sécurité de L'information Du QuébecbbbPas encore d'évaluation
- Extraits Cinemas Berberes Intro Et Chapt 1 PartialDocument35 pagesExtraits Cinemas Berberes Intro Et Chapt 1 PartialADM DOCPas encore d'évaluation
- Les Secrets de L'AubeDocument26 pagesLes Secrets de L'AubeStéphane GrarePas encore d'évaluation
- Mircea Eugen Radu - CVDocument2 pagesMircea Eugen Radu - CVRaduTu1 RaduTu1Pas encore d'évaluation
- Maths LicenceDocument269 pagesMaths Licencevenanceharold100% (1)
- Swift Corporate Rules FRDocument51 pagesSwift Corporate Rules FRAnge WikPas encore d'évaluation
- DPE ds1Document4 pagesDPE ds1Bouderbala JamelPas encore d'évaluation
- RAP Suivi de Realisation en BatimentDocument20 pagesRAP Suivi de Realisation en BatimentOuezna Bahloul100% (1)
- Sous DifférentielDocument11 pagesSous DifférentielFatima DocPas encore d'évaluation
- TD Adresse IPDocument2 pagesTD Adresse IPYoussef ChennoufPas encore d'évaluation
- CMTDDocument11 pagesCMTDNazim AberkanePas encore d'évaluation
- Controle Esa Semiconducteur V1Document2 pagesControle Esa Semiconducteur V1El Hasnaoui YsfPas encore d'évaluation
- L'informatique Décisionnelle de A À Z Sur Le Cas Orion Star Table Des MatièresDocument204 pagesL'informatique Décisionnelle de A À Z Sur Le Cas Orion Star Table Des MatièresMohamed ESSALBI100% (1)
- ccf3 Morsang ClavaudDocument15 pagesccf3 Morsang ClavaudPhilippeTavernierPas encore d'évaluation
- Résonateur Notice-Francais-Effet-DumasDocument4 pagesRésonateur Notice-Francais-Effet-Dumasjos34800Pas encore d'évaluation
- RAQ SESSII Management de La Qualité-1Document28 pagesRAQ SESSII Management de La Qualité-1Ali SulaimanPas encore d'évaluation
- Installation Guide - FRDocument66 pagesInstallation Guide - FRjovoPas encore d'évaluation
- Currat BenjaminDocument52 pagesCurrat BenjaminwafaPas encore d'évaluation
- Schéma 2016Document7 pagesSchéma 2016Thierry roland UmPas encore d'évaluation
- Cours 12 Wifi ReseauDocument10 pagesCours 12 Wifi ReseauŁaśsaèd ĆĥèķimaPas encore d'évaluation