Vous aimerez peut-être aussi
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFAdil El AzzouziPas encore d'évaluation
- Devoir de Contrôle #2 - Electricité - 3ème Technique (2009-2010) Ghanmi NasrDocument7 pagesDevoir de Contrôle #2 - Electricité - 3ème Technique (2009-2010) Ghanmi Nasrmatmatijamel100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenKämîŁyä Nádïta100% (1)
- Schema 4eme Annee 2Document4 pagesSchema 4eme Annee 2BAMALJoseph Firmin100% (5)
- Planning Ménage Gratuit Maman OrganisationDocument1 pagePlanning Ménage Gratuit Maman Organisationhelewaut100% (1)
- Devoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument14 pagesDevoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFYosra Flh100% (2)
- Dossier TechniqueDocument6 pagesDossier Techniqueمحمد بن موسى الخوارزمي0% (1)
- PERҪAGE OU FORAGEDocument34 pagesPERҪAGE OU FORAGEBusiness 228100% (1)
- DT DS2 3ST 23 24Document7 pagesDT DS2 3ST 23 24Nejib JallouliPas encore d'évaluation
- Machine de Découpage de Carton: Devoir de Controle N°1 Prénom: Classe: 2Sc N°Document5 pagesMachine de Découpage de Carton: Devoir de Controle N°1 Prénom: Classe: 2Sc N°Adel KmimechPas encore d'évaluation
- DT DS2 3ST 23 24Document7 pagesDT DS2 3ST 23 24Nejib JallouliPas encore d'évaluation
- BTS 2018 Sujet Hydraulique Pneumatique (MM)Document4 pagesBTS 2018 Sujet Hydraulique Pneumatique (MM)cheikh ahmed tidiane fayePas encore d'évaluation
- DCN°3 3ScT 16-17 DTDocument3 pagesDCN°3 3ScT 16-17 DTBouabdellaoui saif ennasr100% (1)
- DeoirDocument6 pagesDeoirbasmaPas encore d'évaluation
- DevoirDocument2 pagesDevoirsoufiane8fkaPas encore d'évaluation
- DT DS1 3STDocument2 pagesDT DS1 3STKadri MongiPas encore d'évaluation
- DS1 2019-DTDocument5 pagesDS1 2019-DTMouad MemniPas encore d'évaluation
- Devoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFDocument15 pagesDevoir de Synthèse N°3 2011 2012 (Ben Abdallah Marouan) PDFmohamed1101Pas encore d'évaluation
- DT DC3 FinaleDocument6 pagesDT DC3 FinaleChaabane BOUALIPas encore d'évaluation
- Devoir Corrigé de Synthèse N°3 - Génie Mécanique Unité Flexible D'usinage - Bac Technique (2011-2012) MR Ben Abdallah Marouan - 2Document15 pagesDevoir Corrigé de Synthèse N°3 - Génie Mécanique Unité Flexible D'usinage - Bac Technique (2011-2012) MR Ben Abdallah Marouan - 2Bouabdellaoui saif ennasrPas encore d'évaluation
- 4714 Bts Cpi E51 2014Document29 pages4714 Bts Cpi E51 2014wexah38798Pas encore d'évaluation
- CHAP VI Leçon 1 TR Pignon Crémaillère Vis Ecrou.Document8 pagesCHAP VI Leçon 1 TR Pignon Crémaillère Vis Ecrou.Jaouher BakloutiPas encore d'évaluation
- Système Automatique de Découpage - Perçage: TechnologieDocument6 pagesSystème Automatique de Découpage - Perçage: TechnologieChaabane BOUALIPas encore d'évaluation
- SUJET Info Indus Section CC 2019Document5 pagesSUJET Info Indus Section CC 2019Naomie JenniferPas encore d'évaluation
- dc2 3tech 2011 2012Document7 pagesdc2 3tech 2011 2012Bouabdellaoui saif ennasrPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZDocument4 pagesDevoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZsuiton fzPas encore d'évaluation
- TD Secateur Pellenc TotalDocument10 pagesTD Secateur Pellenc Totaljusticedark6Pas encore d'évaluation
- Dessin TectnoDocument3 pagesDessin TectnoESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- DC3 4 SCT (12-13) Corr Came XDocument16 pagesDC3 4 SCT (12-13) Corr Came XWagih MrassiPas encore d'évaluation
- Dossier Tech Dev14Document5 pagesDossier Tech Dev14Nejib JallouliPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - MACHINE DE PRODUCTION DU CAF E CHAUD - 3ème Technique (2017-2018) MR GHORBEL MamdouhDocument7 pagesDevoir de Contrôle N°1 - Technologie - MACHINE DE PRODUCTION DU CAF E CHAUD - 3ème Technique (2017-2018) MR GHORBEL MamdouhakouPas encore d'évaluation
- Malaxeur de Sable AutomatiseDocument9 pagesMalaxeur de Sable AutomatiseHamada HamadaPas encore d'évaluation
- Epreuve Zéro de Commande de Machines Bac F3 Sessio 2023Document4 pagesEpreuve Zéro de Commande de Machines Bac F3 Sessio 2023ymmichel19Pas encore d'évaluation
- ASE 1er GR 2014-1Document22 pagesASE 1er GR 2014-1joshuakimmichjr06Pas encore d'évaluation
- Dossier TechniquexDocument3 pagesDossier TechniquexezzinePas encore d'évaluation
- Chap8 Aut Log Vol3 v2Document19 pagesChap8 Aut Log Vol3 v2Phoe NixPas encore d'évaluation
- Dossier Technique 95spDocument7 pagesDossier Technique 95spouhssainanouarPas encore d'évaluation
- DS2 2014 (DT)Document4 pagesDS2 2014 (DT)Bouabdellaoui saif ennasrPas encore d'évaluation
- S A D T D C: Ysteme Utomatique E RI E AissesDocument6 pagesS A D T D C: Ysteme Utomatique E RI E Aisseslou louPas encore d'évaluation
- DS1-DT-Carreaux CeramiquesDocument4 pagesDS1-DT-Carreaux CeramiquesMouad MemniPas encore d'évaluation
- Auto - BACF1 - 201901Document13 pagesAuto - BACF1 - 201901fopamervinPas encore d'évaluation
- Dossier TechniquexDocument3 pagesDossier TechniquexezzinePas encore d'évaluation
- Auto Tih Blanc2024Document12 pagesAuto Tih Blanc2024LoÏC MINTO'O100% (2)
- DC2 Bras Manipulateur PDFDocument8 pagesDC2 Bras Manipulateur PDFMohamed Adem GhorbelPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Bras Manipulateur - 3ème Technique (2017-2018) MR Ghorbel MamdouhDocument8 pagesDevoir de Contrôle N°2 - Génie Mécanique - Bras Manipulateur - 3ème Technique (2017-2018) MR Ghorbel Mamdouhfiras shiliPas encore d'évaluation
- 4 SC Tech-dt-11-12-Systeme Automatique de MoulageDocument3 pages4 SC Tech-dt-11-12-Systeme Automatique de MoulageezzinePas encore d'évaluation
- Dev3 - Shema Bac F3Document3 pagesDev3 - Shema Bac F3Daouda OUEDRAOGOPas encore d'évaluation
- Auto - 1 - 2023 OkDocument8 pagesAuto - 1 - 2023 OkfjosephfabricePas encore d'évaluation
- DS1 2021-DTDocument6 pagesDS1 2021-DTramziPas encore d'évaluation
- ISTE TD Auto ET3 Fev 2023Document9 pagesISTE TD Auto ET3 Fev 2023bertrand Nathan ayenePas encore d'évaluation
- 34 - Systèmes Séquentiels - GRAFCET - Structure de Base OU Et ET Divers TDDocument8 pages34 - Systèmes Séquentiels - GRAFCET - Structure de Base OU Et ET Divers TDFadwa GHANIPas encore d'évaluation
- 1tronconneuse AutomatiqueDocument40 pages1tronconneuse Automatique2ste3100% (1)
- Devoir de Synthèse N°3 2010 2011 (Ben Abdallah Marouan) PDFDocument16 pagesDevoir de Synthèse N°3 2010 2011 (Ben Abdallah Marouan) PDFmohamed1101Pas encore d'évaluation
- Contrôle 2 - 2022Document11 pagesContrôle 2 - 2022Bilal LaakelPas encore d'évaluation
- (Zone D'étude) : 1. Mise en Situ Ation 2. Présentation Du SystèmeDocument4 pages(Zone D'étude) : 1. Mise en Situ Ation 2. Présentation Du SystèmeMarouen MekkiPas encore d'évaluation
- Devoir+synt 3SCTech 2010Document8 pagesDevoir+synt 3SCTech 2010Bouabdellaoui saif ennasr100% (1)
- Machine de Perçage Et Découpage Automatisée: I. Cahier de ChargeDocument3 pagesMachine de Perçage Et Découpage Automatisée: I. Cahier de ChargeSyrine Mzoughi100% (1)
- Tte95ce1 PDFDocument4 pagesTte95ce1 PDFphoto videoPas encore d'évaluation
- Tte 95 Ce 1Document4 pagesTte 95 Ce 1l mPas encore d'évaluation
- Application 3 Perceuse SensitiveDocument2 pagesApplication 3 Perceuse SensitiveISMAIL ABOUESAADPas encore d'évaluation
- Manuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013D'EverandManuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- Doss Tech Dess Ensemble Principal2013 A3Document1 pageDoss Tech Dess Ensemble Principal2013 A3Nejib JallouliPas encore d'évaluation
- DC1 3st DR 2014Document5 pagesDC1 3st DR 2014Nejib JallouliPas encore d'évaluation
- DC1 3st DT 2014Document3 pagesDC1 3st DT 2014Nejib JallouliPas encore d'évaluation
- Dossier Technique Sess Principale2010Document6 pagesDossier Technique Sess Principale2010Nejib JallouliPas encore d'évaluation
- D-T Cadreuse 2018Document2 pagesD-T Cadreuse 2018Nejib JallouliPas encore d'évaluation
- Nom Et PrénomDocument4 pagesNom Et PrénomNejib JallouliPas encore d'évaluation
- TP-B11 FinDocument9 pagesTP-B11 FinNejib JallouliPas encore d'évaluation
- TP-A42 FinDocument24 pagesTP-A42 FinNejib JallouliPas encore d'évaluation
- DC1 DT 4ST 2016 2017Document4 pagesDC1 DT 4ST 2016 2017Nejib JallouliPas encore d'évaluation
- ds1 3st 2012Document5 pagesds1 3st 2012Nejib JallouliPas encore d'évaluation
- Circuit ÉlecDocument82 pagesCircuit ÉlecNejib JallouliPas encore d'évaluation
- Formation MikropascalDocument69 pagesFormation MikropascalNejib JallouliPas encore d'évaluation
- ElevDocument12 pagesElevNejib JallouliPas encore d'évaluation
- ElevDocument15 pagesElevNejib JallouliPas encore d'évaluation
- RappelDocument6 pagesRappelNejib JallouliPas encore d'évaluation
- FICHE DE PREPARATION Et de DéroulementDocument3 pagesFICHE DE PREPARATION Et de DéroulementNejib JallouliPas encore d'évaluation
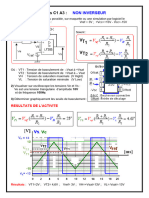
- CHAPITRE C1 Act C1 A3corrigéDocument2 pagesCHAPITRE C1 Act C1 A3corrigéNejib JallouliPas encore d'évaluation
- ProfDocument15 pagesProfNejib JallouliPas encore d'évaluation
- Les Automates ProgrammablesDocument64 pagesLes Automates ProgrammablesNejib JallouliPas encore d'évaluation
- Moteur A Courant ContinuDocument79 pagesMoteur A Courant ContinuNejib JallouliPas encore d'évaluation
- Fiche de Pre Et de DerDocument3 pagesFiche de Pre Et de DerNejib JallouliPas encore d'évaluation
- Exercice D'évaluationDocument5 pagesExercice D'évaluationNejib JallouliPas encore d'évaluation
- Sujet 34Document3 pagesSujet 34Nejib JallouliPas encore d'évaluation
- Sujet 63Document2 pagesSujet 63Nejib JallouliPas encore d'évaluation
- Sujet 83Document2 pagesSujet 83Nejib JallouliPas encore d'évaluation
- Système TriphaséDocument11 pagesSystème TriphaséNejib JallouliPas encore d'évaluation
- Sujet 74Document2 pagesSujet 74Nejib JallouliPas encore d'évaluation
- Sujet 33Document2 pagesSujet 33Nejib JallouliPas encore d'évaluation
- Sujet 13Document3 pagesSujet 13Nejib JallouliPas encore d'évaluation
- Sujet 24Document2 pagesSujet 24Nejib JallouliPas encore d'évaluation
- Fontaine 5Document1 pageFontaine 5khiralouibiPas encore d'évaluation
- Pipe SizingDocument4 pagesPipe SizingmarwitosPas encore d'évaluation
- 5 - Information de Dématerialisation - Bulletin de PaieDocument3 pages5 - Information de Dématerialisation - Bulletin de PaieyalydialloPas encore d'évaluation
- 260 Doc dockit80FRDocument2 pages260 Doc dockit80FRALBATROSPas encore d'évaluation
- Excercices Sur Les Liaisons TD 1,2,3,4,5Document14 pagesExcercices Sur Les Liaisons TD 1,2,3,4,5hello youPas encore d'évaluation
- LE PIED A COULISSE FONCTION - PPT Video Online TéléchargerDocument6 pagesLE PIED A COULISSE FONCTION - PPT Video Online TéléchargerYahya KhadhraPas encore d'évaluation
- Couple Serrage Bte Vitesse Meca Pages244 254Document11 pagesCouple Serrage Bte Vitesse Meca Pages244 254constantine ilyesPas encore d'évaluation
- 6 - Les Contacts TemporisésDocument3 pages6 - Les Contacts Temporisészakarialouni3Pas encore d'évaluation
- Exercice TouretDocument7 pagesExercice TouretL'homme BaldezPas encore d'évaluation
- 109 InspDocument16 pages109 InspKevinCollinPas encore d'évaluation
- User Guide FELCO 802 - 802G - 812 - 822 - HP - V09 - 19 HD PRINT PDFDocument96 pagesUser Guide FELCO 802 - 802G - 812 - 822 - HP - V09 - 19 HD PRINT PDFAleksandar StojilkovicPas encore d'évaluation
- Zombicide Faq 2.0Document8 pagesZombicide Faq 2.0Bull RerollPas encore d'évaluation
- Equipement de Lhabitât Promotion 2019 PDFDocument8 pagesEquipement de Lhabitât Promotion 2019 PDFZaidi FodilPas encore d'évaluation
- Chapitre 2 - Procédés D UsinageDocument10 pagesChapitre 2 - Procédés D UsinageErraji HichamPas encore d'évaluation
- Livret Ball Trap V5Document8 pagesLivret Ball Trap V5beno3t3quettierPas encore d'évaluation
- Mécanique de Précision - Travaux Pratiques de FraisageDocument116 pagesMécanique de Précision - Travaux Pratiques de FraisageЛюбить ЕннеттPas encore d'évaluation
- Tarif 6 Export Mei Janvier 2021Document108 pagesTarif 6 Export Mei Janvier 2021Belgacem ArramiPas encore d'évaluation
- RA Depose Et Repose - Remplacement de L Embrayage SACDocument8 pagesRA Depose Et Repose - Remplacement de L Embrayage SACAAPas encore d'évaluation
- Kam ServicesDocument5 pagesKam Servicesulrich BalloPas encore d'évaluation
- XXXXXXXDocument14 pagesXXXXXXXSofianePas encore d'évaluation
- Lxe LavavajillasDocument92 pagesLxe LavavajillasMaria Aydee Leon VPas encore d'évaluation
- Réglementation de Jeux LockzoneDocument8 pagesRéglementation de Jeux Lockzonexbaba.yagax77Pas encore d'évaluation
- Catalogue Bene BV Tarif 24 Avril 2014 PDF 9 6 Mo Bene BV Lcat0Document369 pagesCatalogue Bene BV Tarif 24 Avril 2014 PDF 9 6 Mo Bene BV Lcat0ZPas encore d'évaluation
- Transmettre 2024 - 2steDocument54 pagesTransmettre 2024 - 2stekhamissbenzPas encore d'évaluation
- Feuille D'inventaire ArmurerieDocument3 pagesFeuille D'inventaire Armurerierialdo.vissaPas encore d'évaluation
- Survivre Au Chaos ChevrotineDocument41 pagesSurvivre Au Chaos ChevrotinebertrandPas encore d'évaluation
- I.S.T.E.B: Fiches D'Instruction Armement BlindeDocument40 pagesI.S.T.E.B: Fiches D'Instruction Armement BlindeMoussa SangarePas encore d'évaluation
- Les Vis PDFDocument4 pagesLes Vis PDFTriki BilelPas encore d'évaluation