Vous aimerez peut-être aussi
- Support Formation Gestion Des Services IT ITIL 4 PDFDocument157 pagesSupport Formation Gestion Des Services IT ITIL 4 PDFreo_doo100% (1)
- Formation Veeam Backup & Replication 6.5Document108 pagesFormation Veeam Backup & Replication 6.5rachidPas encore d'évaluation
- RG Introduction Dun CPA A lIADocument25 pagesRG Introduction Dun CPA A lIAGhorbel OmarPas encore d'évaluation
- Ue 344865282Document25 pagesUe 344865282WarrenPas encore d'évaluation
- Présentation D'un Microcontroleur Doc ÉlevDocument4 pagesPrésentation D'un Microcontroleur Doc ÉlevNejib JallouliPas encore d'évaluation
- RappelDocument6 pagesRappelNejib JallouliPas encore d'évaluation
- Formation MikropascalDocument69 pagesFormation MikropascalNejib JallouliPas encore d'évaluation
- Formation PICDocument48 pagesFormation PICbking2380% (5)
- Cours Pic 2010 LST IEEADocument40 pagesCours Pic 2010 LST IEEAomarchrifPas encore d'évaluation
- Electronique Et Loisirs N008Document75 pagesElectronique Et Loisirs N008mechergui100% (2)
- Compte Rendu Mooc Semaine 2Document4 pagesCompte Rendu Mooc Semaine 2TanankemPas encore d'évaluation
- Chap1 - LISI - Généralités Up Et UcDocument23 pagesChap1 - LISI - Généralités Up Et UcInes DhamerPas encore d'évaluation
- Electronique Et Loisirs N009Document75 pagesElectronique Et Loisirs N009mechergui100% (5)
- Electronique Et Loisirs N017Document74 pagesElectronique Et Loisirs N017mechergui100% (2)
- Capteur de SonDocument12 pagesCapteur de SonEmēry ChylerPas encore d'évaluation
- CF Cont 9 20Document4 pagesCF Cont 9 20Ayman LamzouriPas encore d'évaluation
- Electronique Et Loisirs N013Document76 pagesElectronique Et Loisirs N013mechergui100% (5)
- Microcontrolleurs C13Document16 pagesMicrocontrolleurs C13Coop ZkuberveitPas encore d'évaluation
- PIC LeçonN°1Document16 pagesPIC LeçonN°1Smart ClassePas encore d'évaluation
- Electronique Et Loisirs N011Document73 pagesElectronique Et Loisirs N011mecherguiPas encore d'évaluation
- La MinuterieDocument19 pagesLa MinuterieYoucef SamiPas encore d'évaluation
- Electronique Et Loisirs N007Document77 pagesElectronique Et Loisirs N007mechergui100% (1)
- Initiation Au PicsDocument41 pagesInitiation Au PicsLamenace QatarisPas encore d'évaluation
- Micro Control EurDocument7 pagesMicro Control EurHasina RakotondraveloPas encore d'évaluation
- Epreuve E4 Bts SN Ir 2016 SujetDocument10 pagesEpreuve E4 Bts SN Ir 2016 SujetMouhamadPas encore d'évaluation
- Cours Architecture IOT 3Document17 pagesCours Architecture IOT 3Sourour JellaliPas encore d'évaluation
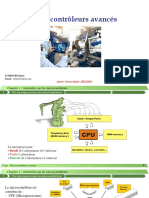
- Microcontroeluers AvancésDocument83 pagesMicrocontroeluers AvancésFeesher DragwelPas encore d'évaluation
- Acquerire SMB Idrissi 2019Document8 pagesAcquerire SMB Idrissi 2019mahmoudPas encore d'évaluation
- Initiation Mycropython 2Document25 pagesInitiation Mycropython 2rolandPas encore d'évaluation
- Cours 1Document56 pagesCours 1ElMegoPas encore d'évaluation
- Microprocesseur Vs Microcontrôleur - Quelle Est La Différence - Shunlongwei Co. LTDDocument9 pagesMicroprocesseur Vs Microcontrôleur - Quelle Est La Différence - Shunlongwei Co. LTDASSANI PATAULEPas encore d'évaluation
- Walid Hakimi: Travaux Pratique N°1 de M Accès À La Mémoire RAM Du PIC 16F877Document6 pagesWalid Hakimi: Travaux Pratique N°1 de M Accès À La Mémoire RAM Du PIC 16F877amaniPas encore d'évaluation
- Chapitre 4Document37 pagesChapitre 4Ahmed JguirimPas encore d'évaluation
- Arduino Uno SchematicDocument5 pagesArduino Uno SchematicTabet KhPas encore d'évaluation
- Formation stm32f4 Discovery 200705142633Document46 pagesFormation stm32f4 Discovery 200705142633mohamed.saidi212001Pas encore d'évaluation
- CHP IV - Conditionnement Du Signal Du Capteur PDFDocument98 pagesCHP IV - Conditionnement Du Signal Du Capteur PDFAFAF100% (1)
- DIAPO - Microcontroleurs Et ApplicationsDocument57 pagesDIAPO - Microcontroleurs Et ApplicationskibongilankiambiPas encore d'évaluation
- Exo Chap1 Chap2Document7 pagesExo Chap1 Chap2Adil MehdaryPas encore d'évaluation
- AII - Chap 2 - Les APIDocument16 pagesAII - Chap 2 - Les APIfazfrito lacaviataPas encore d'évaluation
- Mi 2Document18 pagesMi 2pedroPas encore d'évaluation
- 5 L ApiDocument10 pages5 L ApiArfaoui AymenPas encore d'évaluation
- Cours Capteur Spécifiques ProfDocument5 pagesCours Capteur Spécifiques Proffedelogement allierPas encore d'évaluation
- Cours Lignes de TransmissionDocument74 pagesCours Lignes de TransmissionAHMADOU Abdoul koudoussePas encore d'évaluation
- Chapitre 1Document13 pagesChapitre 1timo timoPas encore d'évaluation
- Exerc I8224 Capteurs - Analogiques Fonctions - Affines.v075Document7 pagesExerc I8224 Capteurs - Analogiques Fonctions - Affines.v075Stéphane SantonPas encore d'évaluation
- Cours de TransmissionDocument40 pagesCours de TransmissionTresor BrouPas encore d'évaluation
- 1774853Document32 pages1774853meryemPas encore d'évaluation
- Fonctionnement Du Transistor Bipolaire en Régime Saturé Ou BloquéDocument9 pagesFonctionnement Du Transistor Bipolaire en Régime Saturé Ou BloquébraindzPas encore d'évaluation
- 2023 Manuel TP PIC18F45K22 MPLABX 2Document21 pages2023 Manuel TP PIC18F45K22 MPLABX 2Amine LahlalPas encore d'évaluation
- TP Ensa07Document14 pagesTP Ensa07The geek CuestaPas encore d'évaluation
- 2 - Les Composants - EnPu PDFDocument43 pages2 - Les Composants - EnPu PDFAnonymous 78iAn6Pas encore d'évaluation
- Cours PIC-1Document136 pagesCours PIC-1dbmariem8Pas encore d'évaluation
- Cours CapteursDocument16 pagesCours Capteursyouri59490100% (1)
- 2015 Cours1 Intro MicroDocument4 pages2015 Cours1 Intro MicrobouchenebPas encore d'évaluation
- Capteurs AcoustiquesDocument34 pagesCapteurs AcoustiquesKhd AchourPas encore d'évaluation
- Un Microcontrôleur Est Un Circuit Intégré Rassemblant Dans Un Même Boitier Un MicroprocesseurDocument9 pagesUn Microcontrôleur Est Un Circuit Intégré Rassemblant Dans Un Même Boitier Un MicroprocesseuromarPas encore d'évaluation
- Grain 5Document5 pagesGrain 5Elo TarikPas encore d'évaluation
- Formation 1 Tabsit 3olomDocument61 pagesFormation 1 Tabsit 3olomakkaredouane89Pas encore d'évaluation
- Expose MicrocontroleurDocument29 pagesExpose MicrocontroleurAssia Bakali88% (8)
- Pfe Serrure Codee AliDocument32 pagesPfe Serrure Codee AliAly Bendlala83% (12)
- Informatique physique: Explorer la vision par ordinateur dans l'informatique physiqueD'EverandInformatique physique: Explorer la vision par ordinateur dans l'informatique physiquePas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Filtre adaptatif: Améliorer la vision par ordinateur grâce au filtrage adaptatifD'EverandFiltre adaptatif: Améliorer la vision par ordinateur grâce au filtrage adaptatifPas encore d'évaluation
- La révolution technologique qui va bientôt nous surprendreD'EverandLa révolution technologique qui va bientôt nous surprendrePas encore d'évaluation
- Doss Tech Dess Ensemble Principal2013 A3Document1 pageDoss Tech Dess Ensemble Principal2013 A3Nejib JallouliPas encore d'évaluation
- Dossier Technique Sess Principale2010Document6 pagesDossier Technique Sess Principale2010Nejib JallouliPas encore d'évaluation
- D-T Cadreuse 2018Document2 pagesD-T Cadreuse 2018Nejib JallouliPas encore d'évaluation
- DC1 DT 4ST 2016 2017Document4 pagesDC1 DT 4ST 2016 2017Nejib JallouliPas encore d'évaluation
- DC1 3st DT 2014Document3 pagesDC1 3st DT 2014Nejib JallouliPas encore d'évaluation
- Nom Et PrénomDocument4 pagesNom Et PrénomNejib JallouliPas encore d'évaluation
- TP-A42 FinDocument24 pagesTP-A42 FinNejib JallouliPas encore d'évaluation
- ElevDocument12 pagesElevNejib JallouliPas encore d'évaluation
- DC1 3st DR 2014Document5 pagesDC1 3st DR 2014Nejib JallouliPas encore d'évaluation
- TP-B11 FinDocument9 pagesTP-B11 FinNejib JallouliPas encore d'évaluation
- ds1 3st 2012Document5 pagesds1 3st 2012Nejib JallouliPas encore d'évaluation
- Circuit ÉlecDocument82 pagesCircuit ÉlecNejib JallouliPas encore d'évaluation
- FICHE DE PREPARATION Et de DéroulementDocument3 pagesFICHE DE PREPARATION Et de DéroulementNejib JallouliPas encore d'évaluation
- CHAPITRE C1 Act C1 A3corrigéDocument2 pagesCHAPITRE C1 Act C1 A3corrigéNejib JallouliPas encore d'évaluation
- ElevDocument15 pagesElevNejib JallouliPas encore d'évaluation
- ProfDocument15 pagesProfNejib JallouliPas encore d'évaluation
- Les Automates ProgrammablesDocument64 pagesLes Automates ProgrammablesNejib JallouliPas encore d'évaluation
- Exercice D'évaluationDocument5 pagesExercice D'évaluationNejib JallouliPas encore d'évaluation
- Fiche de Pre Et de DerDocument3 pagesFiche de Pre Et de DerNejib JallouliPas encore d'évaluation
- Sujet 63Document2 pagesSujet 63Nejib JallouliPas encore d'évaluation
- Moteur A Courant ContinuDocument79 pagesMoteur A Courant ContinuNejib JallouliPas encore d'évaluation
- Sujet 24Document2 pagesSujet 24Nejib JallouliPas encore d'évaluation
- Système TriphaséDocument11 pagesSystème TriphaséNejib JallouliPas encore d'évaluation
- Sujet 83Document2 pagesSujet 83Nejib JallouliPas encore d'évaluation
- Sujet 74Document2 pagesSujet 74Nejib JallouliPas encore d'évaluation
- Sujet 33Document2 pagesSujet 33Nejib JallouliPas encore d'évaluation
- Sujet 34Document3 pagesSujet 34Nejib JallouliPas encore d'évaluation
- Sujet 13Document3 pagesSujet 13Nejib JallouliPas encore d'évaluation
- G120C Doc ProgrammationDocument98 pagesG120C Doc ProgrammationHanen MejbriPas encore d'évaluation
- IpDocument92 pagesIpSouka BhiriPas encore d'évaluation
- Manon Le Galès CR Conférence Jacques DonguyDocument7 pagesManon Le Galès CR Conférence Jacques DonguyFerial HachemiPas encore d'évaluation
- TPN 02Document2 pagesTPN 02zina15172Pas encore d'évaluation
- Microsoft PowerPoint - Convertir Du Texte en Graphique SmartArt Et InversementDocument5 pagesMicrosoft PowerPoint - Convertir Du Texte en Graphique SmartArt Et InversementmuselhakPas encore d'évaluation
- Série 4 Gestion de La Mémoire CentraleDocument3 pagesSérie 4 Gestion de La Mémoire Centrale사라SaraPas encore d'évaluation
- U S Government Research ReportsDocument816 pagesU S Government Research ReportsCarbonelPas encore d'évaluation
- STIC1 2020-2021 TD/TP1 Par DR KADJO T. Lambert: EvaluationsDocument2 pagesSTIC1 2020-2021 TD/TP1 Par DR KADJO T. Lambert: EvaluationsTanon lambert KadjoPas encore d'évaluation
- CVBELARBINOURDocument1 pageCVBELARBINOURAymenPas encore d'évaluation
- Formation Basique ExcelDocument10 pagesFormation Basique ExcelOmar AbdouPas encore d'évaluation
- Correction TD de RévisionDocument1 pageCorrection TD de Révisionmeriem hasPas encore d'évaluation
- Master 1672 PDFDocument46 pagesMaster 1672 PDFSaloua SalouaPas encore d'évaluation
- TP 1 Réplication Asymetrique Synchrone MySQLDocument2 pagesTP 1 Réplication Asymetrique Synchrone MySQLBakary SallPas encore d'évaluation
- COVADIS-AUTOCAD (Compatibilité Versions)Document3 pagesCOVADIS-AUTOCAD (Compatibilité Versions)Anonymous xJs23KoroO25% (4)
- Pas À PasDocument14 pagesPas À PasYoucef ChaibelainPas encore d'évaluation
- Microsoft Official Course: Implémentation Du Système DNS (Domain Name System)Document50 pagesMicrosoft Official Course: Implémentation Du Système DNS (Domain Name System)chaimaa morabitPas encore d'évaluation
- Rapport Openimsasterisk Abs 170529135404Document40 pagesRapport Openimsasterisk Abs 170529135404Wassim Dan100% (1)
- Linux Tome1Document550 pagesLinux Tome1LamaseuPas encore d'évaluation
- Case Study 1 ING1 2012 PDFDocument2 pagesCase Study 1 ING1 2012 PDFFatma RouissiPas encore d'évaluation
- EXAMEN FIN T1-5eme-2023-2024Document2 pagesEXAMEN FIN T1-5eme-2023-2024konanfrdassisePas encore d'évaluation
- 5-Manipulation des ED requetes MDX 22-23Document46 pages5-Manipulation des ED requetes MDX 22-23nour souabniPas encore d'évaluation
- Aymen Kefis CVDocument2 pagesAymen Kefis CVZeeshan AhmedPas encore d'évaluation
- EQUANS Quantes FR WEB 2022Document3 pagesEQUANS Quantes FR WEB 2022Loredana LorePas encore d'évaluation
- La Maintenance PredictiveDocument6 pagesLa Maintenance PredictiveMirado Nasandratra AndriarimalalaPas encore d'évaluation
- Tuto SQUIDDocument5 pagesTuto SQUIDGael MaianoPas encore d'évaluation
- CTL Eval ABD SolDocument5 pagesCTL Eval ABD SolzarourePas encore d'évaluation