Vous aimerez peut-être aussi
- La Cité de La Peur - ScriptDocument26 pagesLa Cité de La Peur - Scriptjbkern1431Pas encore d'évaluation
- Exercices Partie1Document8 pagesExercices Partie1Paola CinnellaPas encore d'évaluation
- Calcul CareneDocument2 pagesCalcul Careneمحمد الأمين شرفاويPas encore d'évaluation
- TP ResistanceDocument11 pagesTP ResistancehamzaPas encore d'évaluation
- Master M1-Essais en MerDocument12 pagesMaster M1-Essais en MerNabil ZahmaniPas encore d'évaluation
- Dynamique Des Engins de Peche COPIEDocument41 pagesDynamique Des Engins de Peche COPIEMöhćîńé LāmīņēPas encore d'évaluation
- SIMines PSIDocument17 pagesSIMines PSImothsnorPas encore d'évaluation
- ModélisationDocument6 pagesModélisationpitetePas encore d'évaluation
- 2022 MP SI MinesPonts SDocument26 pages2022 MP SI MinesPonts Sleobrut28Pas encore d'évaluation
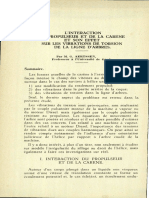
- L'Interaction D U Propulseur E T D E La Carene Et Soneffet Sur Les Vibrations de Torsion D E La Ligne D'Arbres. Par M. G. AerïssenDocument33 pagesL'Interaction D U Propulseur E T D E La Carene Et Soneffet Sur Les Vibrations de Torsion D E La Ligne D'Arbres. Par M. G. AerïssenMed Amine RessadPas encore d'évaluation
- 2018-09 DNB Techno Metropole Pilotage-Bateau-2Document5 pages2018-09 DNB Techno Metropole Pilotage-Bateau-2juliedelys18Pas encore d'évaluation
- Attinage PositionnableDocument10 pagesAttinage PositionnableUnica Figlia KenzaPas encore d'évaluation
- CCMP PSI 2021 BassinTractionLHEEA SujetDocument36 pagesCCMP PSI 2021 BassinTractionLHEEA SujetNizar SahidPas encore d'évaluation
- Si MP 2022Document16 pagesSi MP 2022NguyenPas encore d'évaluation
- ThA Se Arnault TremoletDocument227 pagesThA Se Arnault TremoletKHADIJA LAMKALECHPas encore d'évaluation
- CCMP MP 2021 LHEEA SujetDocument32 pagesCCMP MP 2021 LHEEA SujetJules ThoravalPas encore d'évaluation
- Introduction GeneraleDocument54 pagesIntroduction Generaleامين البحري꧁Pas encore d'évaluation
- Memento de Stabilite 1Document17 pagesMemento de Stabilite 1Abd OuPas encore d'évaluation
- Sujet PSI 2022Document17 pagesSujet PSI 20224pc5dj89c4Pas encore d'évaluation
- E4 U41 Bts CN 2018 SujetDocument13 pagesE4 U41 Bts CN 2018 Sujetcoulibaly kassimPas encore d'évaluation
- EolienneDocument2 pagesEolienneLeila KhalijPas encore d'évaluation
- Le Rotor de Flettner - AudeBunel - AntoninRival-1 ImportantDocument23 pagesLe Rotor de Flettner - AudeBunel - AntoninRival-1 Importantenguerrandvauby2Pas encore d'évaluation
- VIS ARCHIMEDE TURBINE INSA STRASBOURG G.DELLINGER AUGC Rev1 PDFDocument8 pagesVIS ARCHIMEDE TURBINE INSA STRASBOURG G.DELLINGER AUGC Rev1 PDFIsmael ChomoPas encore d'évaluation
- Introduction PompesDocument97 pagesIntroduction PompesMohammed Amine Kened100% (4)
- TD4-mécanique Des FluidesDocument12 pagesTD4-mécanique Des FluidesSAYOURI MOHAMMEDPas encore d'évaluation
- Baccalaur at Technologique 2022 - STL - Physique Chimie Et Math Matiques 114257 - 0Document22 pagesBaccalaur at Technologique 2022 - STL - Physique Chimie Et Math Matiques 114257 - 0admin efbPas encore d'évaluation
- Efforts Sur Une Conduite Sous-Marine en Zone CôtièreDocument12 pagesEfforts Sur Une Conduite Sous-Marine en Zone CôtièrekbenjikaPas encore d'évaluation
- Projet Meca Flu 2022Document10 pagesProjet Meca Flu 2022AminPas encore d'évaluation
- Cours2 CIRCUITS HYDRAULIQUES BASESDocument71 pagesCours2 CIRCUITS HYDRAULIQUES BASESAbdrezzak Mounouar100% (1)
- Université Mohammed V - Rabat Ecole Nationale Supérieure D'arts Et MétiersDocument2 pagesUniversité Mohammed V - Rabat Ecole Nationale Supérieure D'arts Et MétiersManal QuorsanePas encore d'évaluation
- Labo EcoulementsDocument15 pagesLabo EcoulementsSaid DhimdiPas encore d'évaluation
- 2011.TH18228.Rammal - Hussein.Chapitre 4Document34 pages2011.TH18228.Rammal - Hussein.Chapitre 4halmoPas encore d'évaluation
- Comité National de Sélection Des Sujets P3 3.2 0691.docx Ocqp 2017Document7 pagesComité National de Sélection Des Sujets P3 3.2 0691.docx Ocqp 2017Florimond NcPas encore d'évaluation
- CH4 .Bis - Dim. R Eau Usée GC 20Document5 pagesCH4 .Bis - Dim. R Eau Usée GC 20Le GéniePas encore d'évaluation
- Mesure de ViscositéDocument5 pagesMesure de ViscositéFeroudja TaouesPas encore d'évaluation
- DNB Barrage de NavigationDocument7 pagesDNB Barrage de NavigationPetits talents symphoniques du Nord PTSNPas encore d'évaluation
- Circuit HydrauliqueDocument29 pagesCircuit HydrauliqueAbdoul Fatré KienouPas encore d'évaluation
- DNB SciencesDocument7 pagesDNB SciencesPetits talents symphoniques du Nord PTSNPas encore d'évaluation
- DNB 2018 Liban SciencesDocument7 pagesDNB 2018 Liban SciencesLETUDIANTPas encore d'évaluation
- Epreuve Master 21-22Document3 pagesEpreuve Master 21-22Venveslas BALOUBIPas encore d'évaluation
- Exercices EoliennesDocument3 pagesExercices Eoliennesmohamed farah100% (1)
- Arnal PDFDocument13 pagesArnal PDFBayari ArPas encore d'évaluation
- CNC 2022 Mécanique de FluidesDocument6 pagesCNC 2022 Mécanique de Fluidesomarboulakhrif7100% (1)
- CH05 Mécanisme de Transmission Du MouvementDocument8 pagesCH05 Mécanisme de Transmission Du Mouvementmouf zerargaPas encore d'évaluation
- Master M1-AutopropulsionDocument3 pagesMaster M1-AutopropulsionNabil ZahmaniPas encore d'évaluation
- Tpfluides L3Document14 pagesTpfluides L3Diae BenzekriPas encore d'évaluation
- Exo Dynamique Des Fluides Réels PDFDocument2 pagesExo Dynamique Des Fluides Réels PDFClaudio BelalahyPas encore d'évaluation
- UntitledDocument19 pagesUntitledOussama OussamqPas encore d'évaluation
- Calcul de L'energie D'accostageDocument6 pagesCalcul de L'energie D'accostageCLEMENTPas encore d'évaluation
- Chap 0 Cours D Aerotechnique GeneralitesDocument17 pagesChap 0 Cours D Aerotechnique Generalitesqzm74l100% (1)
- Capt EursDocument30 pagesCapt Eursقرين لطفيPas encore d'évaluation
- Aerodynamique de BaseDocument53 pagesAerodynamique de BaseAli ElmahaouiPas encore d'évaluation
- CM8 Biomécanique Des APSADocument38 pagesCM8 Biomécanique Des APSAlucienbolt28Pas encore d'évaluation
- Fonctionnement AvionDocument19 pagesFonctionnement Avionjacques EDOHPas encore d'évaluation
- TD-Mecanique Des Fluides IIDocument4 pagesTD-Mecanique Des Fluides IIThillo SOWPas encore d'évaluation
- Annales de Stabilite Pour OCQPDocument6 pagesAnnales de Stabilite Pour OCQPFlorimond NcPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Fiche Analyse Du Cycle de VieDocument2 pagesFiche Analyse Du Cycle de VieAndré TuoPas encore d'évaluation
- Processus de RecrutementDocument8 pagesProcessus de Recrutementnassy13100% (1)
- Catalogo 2021 FraDocument17 pagesCatalogo 2021 FraMarvin PathPas encore d'évaluation
- 1 - Ton Guide de Perte de PoidsDocument23 pages1 - Ton Guide de Perte de PoidsInes HADJ SAIDPas encore d'évaluation
- Plano - Topografico - de - La - Ciudad - de Caracas - Siglo XIXDocument3 pagesPlano - Topografico - de - La - Ciudad - de Caracas - Siglo XIXEloisaOTPas encore d'évaluation
- B-P-U Tout Laes PartiesDocument18 pagesB-P-U Tout Laes PartiesSabri RemremPas encore d'évaluation
- Fascicule IcDocument21 pagesFascicule IcWagane FAYEPas encore d'évaluation
- ESE Solar - Schéma de Principe SSC Avec Module Production ECS Instantanée - V2Document1 pageESE Solar - Schéma de Principe SSC Avec Module Production ECS Instantanée - V2monnomPas encore d'évaluation
- Optique Géométrique SMPDocument36 pagesOptique Géométrique SMPMOHAMMED ZAKARIA BAALIPas encore d'évaluation
- Introduction À L - Épistémologie - A. Virieux-ReymondDocument12 pagesIntroduction À L - Épistémologie - A. Virieux-ReymondErwan MorelPas encore d'évaluation
- Cours AJEL Université de Bordj Bou Arreridj PDFDocument24 pagesCours AJEL Université de Bordj Bou Arreridj PDFRe Sab RinaPas encore d'évaluation
- LIVRESCOLAIRE 2nde - Livre Du Professeur - Chapitre 10 - Statistiques DescriptivesDocument28 pagesLIVRESCOLAIRE 2nde - Livre Du Professeur - Chapitre 10 - Statistiques DescriptivesplumagathaPas encore d'évaluation
- Formation SpssDocument33 pagesFormation Spsslfg fsegn100% (1)
- As TN FR Enduit Souple AstralDocument11 pagesAs TN FR Enduit Souple AstralMehdi BSZPas encore d'évaluation
- Dossier PCRSDocument2 pagesDossier PCRSBachir FethizaPas encore d'évaluation
- dpt06 Service - Tourisme Clef VerteDocument1 pagedpt06 Service - Tourisme Clef Verteoumayma oufirPas encore d'évaluation
- TDR - Perso 2 PCI AFRISTATDocument3 pagesTDR - Perso 2 PCI AFRISTATVanawaPas encore d'évaluation
- RECAP - DPS - Atteintes À La Nation, À L'état Et À La Paix PubliqueDocument1 pageRECAP - DPS - Atteintes À La Nation, À L'état Et À La Paix PubliquedelphouPas encore d'évaluation
- La Petite Danseuse de Quatorze Ans by Laurens CamilleDocument104 pagesLa Petite Danseuse de Quatorze Ans by Laurens CamilleClarisse Meunier100% (1)
- Crédit ScoringDocument11 pagesCrédit ScoringAshraf Borzym100% (1)
- Andre Noel - FévrierDocument4 pagesAndre Noel - FévrierFrontNational22Pas encore d'évaluation
- Devis EstimatifDocument4 pagesDevis EstimatifAnonymous FIZzeYDCgpPas encore d'évaluation
- Troubles NVDocument26 pagesTroubles NVEccoPas encore d'évaluation
- Glucides (NXPowerLite)Document131 pagesGlucides (NXPowerLite)Mohamed Habib BrinsiPas encore d'évaluation
- IMSLP569176 PMLP917211 Me Thode - Pour - La - Trompette - Pre Ce de e - ... Methode - 1Document83 pagesIMSLP569176 PMLP917211 Me Thode - Pour - La - Trompette - Pre Ce de e - ... Methode - 1wwdlvjhumgr100% (1)
- Lean ManagementDocument21 pagesLean ManagementNadhir NadPas encore d'évaluation
- Althusser Initiation À La Philosophie - XMLDocument136 pagesAlthusser Initiation À La Philosophie - XMLCésar González OchoaPas encore d'évaluation
- Gouvernance DentrepriseDocument70 pagesGouvernance DentrepriseShinPas encore d'évaluation
- Avantis 70 HV - Fenêtres en Aluminium Avec Ouvrant Caché - Sapa Building SystemDocument12 pagesAvantis 70 HV - Fenêtres en Aluminium Avec Ouvrant Caché - Sapa Building SystemSapa Building SystemPas encore d'évaluation