Académique Documents
Professionnel Documents
Culture Documents
CCCT Mas - Partie 2
CCCT Mas - Partie 2
Transféré par
fanny.menager8Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
CCCT Mas - Partie 2
CCCT Mas - Partie 2
Transféré par
fanny.menager8Droits d'auteur :
Formats disponibles
Polytech Nantes
Département génie électrique
Contrôle des chaînes de conversion
triphasées
Pr. ECHALIH Salwa
Contenu
3: Commande machine asynchrone
Machine asynchrone: types, principe de fonctionnement, schéma équivalent
en régime statique.
o Commande scalaire: Commande V/f constant
Modèle dynamique de la machine asynchrone.
Commande vectorielle
Polytech Nantes Pr. Echalih Salwa
Objectif de la commande de la MAS
Equivalence entre la commande d’une MCC et la commande vectorielle d’un MAS
𝐼 𝑖
𝒊𝒔𝒅
𝒊𝒔𝒂
Découplage 𝒊𝒔𝒃
MCC d -q MAS
𝒊𝒔𝒒 𝒊𝒔𝒄
𝑻𝒆𝒎 = 𝒌′. 𝑰. 𝒊 𝑻𝒆𝒎 = 𝑲𝒕 . 𝒊𝒔𝒅 . 𝒊𝒔𝒒
Composante Composante Composante Composante
Du couple Du flux Du flux Du couple
Pour réaliser un contrôle de la MAS similaire à celui de la MCC à excitation indépendante, il
est nécessaire de déterminer la position du flux et l’orienté en quadrature avec le couple.
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Modélisation de la machine asynchrone dans le référentiel naturel ( triphasé ):
Hypothèses de travail:
- Entrefer constant ;
- Effet d'encochage négligeable;
𝜃
- Circuit magnétique non saturé et a perméabilité constante,
- Pertes ferromagnétiques négligeables,
- L’influence de l’effet de peau et l’échauffement n’est pas prise
en compte.
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Considérons la phase a:
Le flux qui traverse la phase a est dû au:
- flux produit par l’enroulement a,
- flux produit par l’enroulement b, 𝜃
- flux produit par l’enroulement c.
La relation entre les courants des autres phases et leur flux
traversant la phase a est exprimée par les inductances mutuelles.
𝚽𝒂𝒔 = 𝚽𝒂𝒔,𝒔 + 𝚽𝒂𝒔,𝒓
𝑳𝒂𝒔 𝒊𝒂𝒔 + 𝑳𝒂𝒃𝒔 𝒊𝒃𝒔 + 𝑳𝒂𝒄𝒔 𝒊𝒄𝒔 𝑳 𝒂𝒓 𝒊𝒂𝒓 + 𝑳𝒂𝒔,𝒃𝒓 𝒊𝒃𝒓 + 𝑳𝒂𝒔,𝒄𝒓 𝒊𝒄𝒓
Inductance mutuelle entre Inductance mutuelle entre phase a du
phases a et b du stator stator et phase b du rotor
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
- Équation électrique: De même, au rotor:
Pour l’ensemble des phases au stator: 𝑣𝑎𝑟 𝑅𝑟 0 0 𝑖𝑎𝑟 𝑑 Φ𝑎𝑟
𝑣𝑏𝑟 = 0 𝑅𝑟 0 𝑖𝑏𝑟 + Φ𝑏𝑟
𝑣𝑎𝑠 𝑅𝑠 0 0 𝑑𝑡
𝑖𝑎𝑠 𝑑 Φ𝑎𝑠 𝑣𝑐𝑟 0 0 𝑅𝑟 𝑖𝑐𝑟 Φ𝑐𝑟
𝑣𝑏𝑠 = 0 𝑅𝑠 0 𝑖𝑏𝑠 + Φ𝑏𝑠
𝑣𝑐𝑠 0 0 𝑅𝑠 𝑖𝑐𝑠 𝑑𝑡 Φ
𝑐𝑠
Ou:
𝑑
𝑣𝑟 = 𝑅𝑟 𝑖𝑟 + Φ𝑟
Ou: 𝑑 𝑑𝑡
𝑣𝑠 = 𝑅𝑠 𝑖𝑠 + Φ𝑠
𝑑𝑡
𝑣𝑠 : matrice des tensions par phase au stator 𝑣𝑟 : matrice des tensions par phase au rotor
𝑖𝑠 : matrice des courants par phase au stator 𝑖𝑟 : matrice des courants par phase au rotor
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
- Équation magnétique:
Stator rotor
Φ𝑎𝑠 𝑙𝑠 𝑚𝑠 𝑚𝑠 𝑖𝑎𝑠 𝑚1 𝑚3 𝑚2 𝑖𝑎𝑟 Φ𝑎𝑟 𝑙𝑟 𝑚𝑟 𝑚𝑟 𝑖𝑎𝑟 𝑚1 𝑚2 𝑚3 𝑖𝑎𝑠
Φ𝑏𝑠 = 𝑚𝑠 𝑙𝑠 𝑚𝑠 𝑖𝑏𝑠 + 𝑚2 𝑚1 𝑚3 𝑖𝑏𝑟 Φ𝑏𝑟 = 𝑚𝑟 𝑙𝑟 𝑚𝑠 𝑖𝑏𝑟 + 𝑚3 𝑚1 𝑚2 𝑖𝑏𝑠
Φ𝑐𝑠 𝑚𝑠 𝑚𝑠 𝑙𝑠 𝑖𝑐𝑠 𝑚3 𝑚2 𝑚1 𝑖𝑐𝑟 Φ𝑐𝑟 𝑚𝑟 𝑚𝑟 𝑙𝑟 𝑖𝑐𝑟 𝑚2 𝑚3 𝑚1 𝑖𝑐𝑠
2𝜋 2𝜋
𝑚1 = 𝑚𝑠𝑟 cos(𝜃) 𝑚2 = 𝑚𝑠𝑟 cos(𝜃 − ) 𝑚3 = 𝑚𝑠𝑟 cos(𝜃 + )
3 3
𝑙𝑠 , 𝑙𝑟 : inductance propre d’un bobinage seul (du stator/rotor).
𝑚𝑠 ∶ inductance mutuelle de couplage entre bobinages du stator.
𝑚𝑟 : inductance mutuelle de couplage entre bobinages du rotor.
𝑚𝑠𝑟 : valeur maximale de l’inductance entre phases rotoriques et statoriques
𝜃: angle électrique définit la position instantanée relative entre les axes statoriques et les axes
rotoriques qui sont choisi comme axes de références.
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Ecriture des équations de la MAS dans un repère commun (d-q):
Transformation de Park
𝜽𝒔 𝒕 = 𝜽𝒓 + 𝜽 𝒕
Transformation de Park (abc) (dq0) :
Transformation de Park (dq0) (abc) :
Polytech Nantes Pr. Echalih Salwa
Modèle dynamique de la MAS à rotor bobiné dans le repère d-q (𝜽𝒔 = 𝜽𝒓 + 𝜽)
𝒅𝚽𝐬𝐝
𝒗𝒔𝒅 = 𝑹𝒔 𝒊𝒔𝒅 + − 𝝎𝒔 𝝓𝒔𝒒
𝑣𝑎𝑠 𝑣𝑠𝑑 𝐝𝐭 𝑖𝑠𝑑
𝑣𝑏𝑠 Park 𝒅𝚽𝐬𝐪 Park 𝑖𝑎𝑠
𝑣𝑐𝑠 𝑣𝑠𝑞 𝒗𝒔𝒒 = 𝑹𝒔 𝒊𝒔𝒒 + + 𝝎𝒔 𝝓𝒔𝒅 𝑖𝑠𝑞 inverse 𝑖𝑏𝑠
𝑃 𝜃𝑠 𝐝𝐭
𝒅𝚽𝐫𝐝 𝑃−1 𝜃𝑠 𝑖𝑐𝑠
𝜃𝑠 𝒗𝒓𝒅 = 𝑹𝒓 𝒊𝒓𝒅 + − 𝝎𝒓 𝝓𝒓𝒒
𝐝𝐭 𝜃𝑠
𝑣𝑟𝑑 𝒅𝚽𝐫𝐪 𝑖𝑟𝑑
𝑣𝑎𝑟 𝒗𝒓𝒒 = 𝑹𝒓 𝒊𝒓𝒒 + + 𝝎𝒓 𝝓𝒓𝒅 Park 𝑖𝑎𝑟
𝑣𝑏𝑟 Park 𝐝𝐭 𝑖𝑏𝑟
𝑖𝑟𝑞 inverse
𝑣𝑐𝑟 𝑣𝑟𝑞 𝝓𝒔𝒅 = 𝑳𝒔 𝒊𝒔𝒅 + 𝑴𝒊𝒓𝒅 𝑖𝑐𝑟
𝑃 𝜃𝑟 𝑃−1 𝜃𝑟
𝝓𝒔𝒒 = 𝑳𝒔 𝒊𝒔𝒒 + 𝑴𝒊𝒓𝒒
𝜃𝑟 𝜃𝑟
𝝓𝒓𝒅 = 𝑳𝒓 𝒊𝒓𝒅 + 𝑴𝒊𝒔𝒅
𝝓𝒓𝒒 = 𝑳𝒓 𝒊𝒓𝒒 + 𝑴𝒊𝒔𝒒
𝑻𝒆𝒎 = 𝟑/𝟐𝑷 𝜱𝒔𝒅 𝒊𝒔𝒒 − 𝜱𝒔𝒒 𝒊𝒔𝒅 = 𝟑/𝟐𝑷𝑴(𝒊𝒓𝒅 𝒊𝒔𝒒 − 𝒊𝒓𝒒 𝒊𝒔𝒅 )
Ω
𝑇𝐿 𝒅𝜴 Cem
𝐿𝑠 = 𝑙𝑠 − 𝑚𝑠 𝑱 + 𝒇𝜴 = 𝑻𝒆𝒎 − 𝑻𝒓
𝒅𝒕
𝐿𝑟 = 𝑙𝑟 − 𝑚𝑟 𝒅𝜽𝒔 𝒅𝜽𝒓
3 𝝎𝒔 = , 𝝎𝒓 = , 𝜽𝒔 = 𝜽 + 𝜽𝒓
𝒅𝒕 𝒅𝒕
𝑀 = 𝑚𝑠𝑟
2
Inductances cycliques
Polytech Nantes Pr. Echalih Salwa
Modèle dynamique de la MAS à cage dans le repère d-q (𝜽𝒔 = 𝜽𝒓 + 𝜽)
Machine à cage (rotor en court-circuit) 𝒗𝒓𝒅 = 𝒗𝒓𝒒 = 𝟎
𝒅𝚽𝐬𝐝 𝑖𝑠𝑑
𝒗𝒔𝒅 = 𝑹𝒔 𝒊𝒔𝒅 + − 𝝎𝒔 𝝓𝒔𝒒 Park
𝑣𝑠𝑑 𝐝𝐭 𝑖𝑎𝑠
𝑣𝑎𝑠
Park 𝒅𝚽𝐬𝐪 𝝓𝒔𝒅 = 𝑳𝒔 𝒊𝒔𝒅 + 𝑴𝒊𝒓𝒅 𝑖𝑠𝑞 inverse 𝑖𝑏𝑠
𝑣𝑏𝑠
𝑣𝑠𝑞 𝒗𝒔𝒒 = 𝑹𝒔 𝒊𝒔𝒒 + + 𝝎𝒔 𝝓𝒔𝒅 𝑃−1 𝜃𝑠 𝑖𝑐𝑠
𝑣𝑐𝑠 𝐝𝐭 𝝓𝒔𝒒 = 𝑳𝒔 𝒊𝒔𝒒 + 𝑴𝒊𝒓𝒒
𝑃 𝜃𝑠
𝒅𝚽𝐫𝐝 𝜃𝑠
𝜃𝑠 𝟎 = 𝑹𝒓 𝒊𝒓𝒅 + − 𝝎𝒓 𝝓𝒓𝒒 𝝓𝒓𝒅 = 𝑳𝒓 𝒊𝒓𝒅 + 𝑴𝒊𝒔𝒅
𝐝𝐭 𝑖𝑟𝑑
𝑣𝑟𝑑 𝝓𝒓𝒒 = 𝑳𝒓 𝒊𝒓𝒒 + 𝑴𝒊𝒔𝒒 Park 𝑖𝑎𝑟
𝑣𝑎𝑟 𝒅𝚽𝐫𝐪
𝑣𝑏𝑟 Park 𝟎 = 𝑹𝒓 𝒊𝒓𝒒 + + 𝝎𝒓 𝝓𝒓𝒅 𝑖𝑟𝑞 inverse 𝑖𝑏𝑟
𝐝𝐭 𝑃−1 𝜃𝑟 𝑖𝑐𝑟
𝑣𝑐𝑟 𝑣𝑟𝑞
𝑃 𝜃𝑟
𝜃𝑟
𝜃𝑟 𝑻𝒆𝒎 = 𝟑/𝟐𝑷 𝜱𝒔𝒅 𝒊𝒔𝒒 − 𝜱𝒔𝒒 𝒊𝒔𝒅 = 𝟑/𝟐𝑷𝑴(𝒊𝒓𝒅 𝒊𝒔𝒒 − 𝒊𝒓𝒒 𝒊𝒔𝒅 ) Cem
𝑇𝐿 Ω
𝒅𝜴
𝐿𝑠 = 𝑙𝑠 − 𝑚𝑠 𝑱 + 𝒇𝜴 = 𝑻𝒆𝒎 − 𝑻𝒓
𝒅𝒕
𝐿𝑟 = 𝑙𝑟 − 𝑚𝑟
3 𝒅𝜽𝒔 𝒅𝜽𝒓
𝑀 = 𝑚𝑠𝑟 𝝎𝒔 = , 𝝎𝒓 = , 𝜽𝒔 = 𝜽 + 𝜽𝒓
𝒅𝒕 𝒅𝒕
2
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Développement de calcul:
𝟏
𝝓𝒔𝒅 = 𝑳𝒔 𝒊𝒔𝒅 + 𝑴𝒊𝒓𝒅 𝚽𝒓𝒅 = 𝑳𝒓 𝒊𝒓𝒅 + 𝑴𝒊𝒔𝒅 𝒊𝒓𝒅 = (𝜱𝒓𝒅 − 𝑴𝒊𝒔𝒅 )
𝑳𝒓
𝝓𝒔𝒒 = 𝑳𝒔 𝒊𝒔𝒒 + 𝑴𝒊𝒓𝒒 𝚽𝒓𝒒 = 𝑳𝒓 𝒊𝒓𝒒 + 𝑴𝒊𝒔𝒒 𝟏
𝒊𝒓𝒒 = (𝜱𝒓𝒒 − 𝑴𝒊𝒔𝒒 )
𝑳𝒓
Les équations des tensions du stator deviennent alors :
𝒅𝒊𝒔𝒅 𝑴 𝒅𝜱𝒓𝒅 𝑴𝒅𝒊𝒔𝒅 𝑴
𝒗𝒔𝒅 = 𝑹𝒔 𝒊𝒔𝒅 + 𝑳𝒔 + − − 𝝎𝒔 (𝑳𝒔 𝒊𝒔𝒒 + 𝜱 − 𝑴𝒊𝒔𝒒
𝒅𝒕 𝑳𝒓 𝒅𝒕 𝒅𝒕 𝑳𝒓 𝒓𝒒
𝑴𝟐 𝒅𝐢𝐬𝒅 𝑴 𝒅𝜱 𝑴𝟐 𝑴𝟐
= 𝑹𝒔 𝒊𝒔𝒅 + 𝑳𝒔 − 𝑳 𝐝𝐭 + 𝑳 𝒅𝒕𝒓𝒅 − 𝝎𝒔 𝒊𝒔𝒒 𝑳𝒔 − − 𝝎𝒔 𝜱𝒓𝒒
𝒓 𝒓 𝑳𝒓 𝑳𝒓
𝑴𝟐 𝒅𝐢𝐬𝒅 𝑴 𝒅𝜱𝒓𝒅 𝑴𝟐 𝑴𝟐
= 𝑹𝒔 𝒊𝒔𝒅 + 𝑳𝒔 𝟏 − 𝑳𝒔 𝑳𝒓 𝐝𝐭
+ 𝑳𝒓 𝒅𝒕
− 𝝎𝒔 𝑳𝒔 𝒊𝒔𝒒 𝟏 −𝑳 − 𝑳 𝝎𝒔 𝜱𝒓𝒒
𝒓 𝒓
𝒅𝐢𝐬𝒅 𝑴 𝒅𝜱𝒓𝒅 𝑴
𝒗𝒔𝒅 = 𝑹𝒔 𝒊𝒔𝒅 + 𝑳𝒔 𝝈𝒔 +𝑳 − 𝝎𝒔 𝑳𝒔 𝝈𝒔 𝒊𝒔𝒒 − 𝑳 𝝎𝒔 𝜱𝒓𝒒
𝐝𝐭 𝒓 𝒅𝒕 𝒓
𝑴𝟐
Avec 𝝈𝒔 = 𝟏 − : coefficient de fuite totale (coeff. de dispersion)
𝑳𝒔 𝑳𝒓
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Développement de calcul:
𝟏
𝝓𝒔𝒅 = 𝑳𝒔 𝒊𝒔𝒅 + 𝑴𝒊𝒓𝒅 𝚽𝒓𝒅 = 𝑳𝒓 𝒊𝒓𝒅 + 𝑴𝒊𝒔𝒅 𝒊𝒓𝒅 = (𝜱 − 𝑴𝒊𝒔𝒅 )
𝑳𝒓 𝒓𝒅
𝝓𝒔𝒒 = 𝑳𝒔 𝒊𝒔𝒒 + 𝑴𝒊𝒓𝒒 𝚽𝒓𝒒 = 𝑳𝒓 𝒊𝒓𝒒 + 𝑴𝒊𝒔𝒒 𝟏
𝒊𝒓𝒒 = (𝜱𝒓𝒒 − 𝑴𝒊𝒔𝒒 )
𝑳𝒓
Les équations des tensions du stator deviennent alors :
𝒅𝒊𝒔𝒒 𝑴 𝒅𝜱𝒓𝒒 𝑴𝒅𝒊𝒔𝒒 𝑴
𝒗𝒔𝒒 = 𝑹𝒔 𝒊𝒔𝒒 + 𝑳𝒔 + − + 𝝎𝒔 (𝑳𝒔 𝒊𝒔𝒅 + 𝜱 − 𝑴𝒊𝒔𝒅
𝒅𝒕 𝑳𝒓 𝒅𝒕 𝒅𝒕 𝑳𝒓 𝒓𝒅
𝑴𝟐 𝒅𝐢𝐬𝒒 𝑴 𝒅𝜱𝒓𝒒 𝑴𝟐 𝑴𝟐
= 𝑹𝒔 𝒊𝒔𝒅 + 𝑳𝒔 − 𝑳 𝐝𝐭 + 𝑳𝒓 𝒅𝒕
+ 𝝎𝒔 𝒊𝒔𝒅 𝑳𝒔 − 𝑳𝒓
+ 𝑳𝒓
𝝎𝒔 𝜱𝒓𝒅
𝒓
𝑴𝟐 𝒅𝐢𝐬𝒒 𝑴 𝒅𝜱𝒓𝒒 𝑴𝟐 𝑴𝟐
= 𝑹𝒔 𝒊𝒔𝒅 + 𝑳𝒔 𝟏 −
𝑳𝒔 𝑳𝒓 𝐝𝐭
+
𝑳𝒓 𝒅𝒕
+ 𝝎𝒔 𝑳𝒔 𝒊𝒔𝒅 𝟏 −
𝑳𝒓
+
𝑳𝒓
𝝎𝒔 𝜱𝒓𝒅
𝒅𝐢𝐬𝒒 𝑴 𝒅𝜱𝒓𝒒 𝑴
𝒗𝒔𝒒 = 𝑹𝒔 𝒊𝒔𝒒 + 𝑳𝒔 𝝈𝒔 +𝑳 + 𝝎𝒔 𝑳𝒔 𝝈𝒔 𝒊𝒔𝒅 + 𝑳 𝝎𝒔 𝜱𝒓𝒅
𝐝𝐭 𝒓 𝒅𝒕 𝒓
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Développement de calcul:
𝟏
𝚽𝒓𝒅 = 𝑳𝒓 𝒊𝒓𝒅 + 𝑴𝒊𝒔𝒅 𝒊𝒓𝒅 = (𝜱 − 𝑴𝒊𝒔𝒅 )
𝑳𝒓 𝒓𝒅
𝚽𝒓𝒒 = 𝑳𝒓 𝒊𝒓𝒒 + 𝑴𝒊𝒔𝒒 𝟏
𝒊𝒓𝒒 = (𝜱𝒓𝒒 − 𝑴𝒊𝒔𝒒 )
𝑳𝒓
Les équations des tensions du rotor deviennent alors :
𝒅𝚽𝐫𝐝 𝒅𝚽𝐫𝐪
𝟎 = 𝑹𝒓 𝒊𝒓𝒅 + − 𝝎𝒓 𝝓𝒓𝒒 𝟎 = 𝑹𝒓 𝒊𝒓𝒒 + + 𝝎𝒓 𝝓𝒓𝒅
𝐝𝐭 𝐝𝐭
𝑹𝒓 𝒅𝚽𝐫𝐝 𝑹𝒓 𝒅𝚽𝐫𝒒
𝟎= 𝜱𝒓𝒅 − 𝑴𝒊𝒔𝒅 + − 𝝎𝒓 𝝓𝒓𝒒 𝟎= 𝜱𝒓𝒒 − 𝑴𝒊𝒔𝒒 + + 𝝎𝒓 𝝓𝒓𝒅
𝑳𝒓 𝐝𝐭 𝑳𝒓 𝐝𝐭
𝑹𝒓 𝒅𝚽𝐫𝐝 𝑹𝒓 𝑹𝒓 𝒅𝚽𝐫𝒒 𝑹𝒓
𝟎= 𝜱𝒓𝒅 + − 𝝎𝒓 𝝓𝒓𝒒 − 𝑴𝒊𝒔𝒅 𝟎= 𝜱𝒓𝒒 + + 𝝎𝒓 𝝓𝒓𝒒 − 𝑴𝒊𝒔𝒒
𝑳𝒓 𝐝𝐭 𝑳𝒓 𝑳𝒓 𝐝𝐭 𝑳𝒓
𝒅𝚽𝐫𝐝 𝒅𝚽𝐫𝒒
𝟎 = 𝜱𝒓𝒅 + 𝝉𝒓 − 𝝎𝒓 𝝉𝒓 𝝓𝒓𝒒 − 𝑴𝒊𝒔𝒅 𝟎 = 𝜱𝒓𝒒 + 𝝉𝒓 + 𝝎𝒓 𝝉𝒓 𝝓𝒓𝒅 − 𝑴𝒊𝒔𝒒
𝐝𝐭 𝐝𝐭
Avec 𝝉𝒓 = 𝑳𝒓 /𝑹𝒓 : constante du temps rotorique
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Développement de calcul:
𝟏
𝚽𝒓𝒅 = 𝑳𝒓 𝒊𝒓𝒅 + 𝑴𝒊𝒔𝒅 𝒊𝒓𝒅 = (𝜱 − 𝑴𝒊𝒔𝒅 )
𝑳𝒓 𝒓𝒅
𝚽𝒓𝒒 = 𝑳𝒓 𝒊𝒓𝒒 + 𝑴𝒊𝒔𝒒 𝟏
𝒊𝒓𝒒 = (𝜱𝒓𝒒 − 𝑴𝒊𝒔𝒒 )
𝑳𝒓
Le couple électromagnétique:
𝟑
𝑻𝒆𝒎 = 𝑷𝑴 𝒊𝒓𝒅 𝒊𝒔𝒒 − 𝒊𝒓𝒒 𝒊𝒔𝒅
𝟐
𝟑𝑷
= 𝑴 𝚽𝐫𝒅 𝒊𝒔𝒒 − 𝑴𝒊𝒔𝒅 𝒊𝒔𝒒 ) − (𝚽𝒓𝒒 𝒊𝒔𝒅 − 𝑴𝒊𝒔𝒒 𝒊𝒔𝒅
𝟐𝑳𝒓
𝟑𝑷
𝑻𝒆𝒎 = 𝑴(𝚽𝐫𝒅 𝒊𝒔𝒒 − 𝚽𝒓𝒒 𝒊𝒔𝒅 )
𝟐𝑳𝒓
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Modèle dynamique de la MAS à cage dans le repère d-q
𝒅𝐢𝐬𝒅 𝑴 𝒅𝜱𝒓𝒅 𝑴
𝒗𝒔𝒅 = 𝑹𝒔 𝒊𝒔𝒅 + 𝑳𝒔 𝝈𝒔 +𝑳 − 𝝎𝒔 𝑳𝒔 𝝈𝒔 𝒊𝒔𝒒 − 𝑳 𝝎𝒔 𝜱𝒓𝒒
𝐝𝐭 𝒓 𝒅𝒕 𝒓
𝒅𝐢𝐬𝒒 𝑴 𝒅𝜱𝒓𝒒 𝑴
𝒗𝒔𝒒 = 𝑹𝒔 𝒊𝒔𝒒 + 𝑳𝒔 𝝈𝒔 +𝑳 + 𝝎𝒔 𝑳𝒔 𝝈𝒔 𝒊𝒔𝒅 + 𝑳 𝝎𝒔 𝜱𝒓𝒅
𝐝𝐭 𝒓 𝒅𝒕 𝒓
𝒅𝚽𝐫𝐝
𝟎 = 𝜱𝒓𝒅 + 𝝉𝒓 − 𝝎𝒓 𝝉𝒓 𝝓𝒓𝒒 − 𝑴𝒊𝒔𝒅
𝐝𝐭
𝒅𝚽𝐫𝒒
𝟎 = 𝜱𝒓𝒒 + 𝝉𝒓 + 𝝎𝒓 𝝉𝒓 𝝓𝒓𝒅 − 𝑴𝒊𝒔𝒒
𝐝𝐭
𝟑𝑷
𝑻𝒆𝒎 = 𝑴(𝚽𝐫𝒅 𝒊𝒔𝒒 − 𝚽𝒓𝒒 𝒊𝒔𝒅 )
𝟐𝑳𝒓
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Modèle dynamique de la MAS à cage dans le repère d-q
𝒅𝐢𝐬𝒅 𝑴 𝑴
𝒗𝒔𝒅 = 𝑹𝒔 𝒊𝒔𝒅 + 𝑳𝒔 𝝈𝒔 +𝑳 𝑴𝒊𝒔𝒅 − 𝚽𝐫𝒅 + 𝝎𝒓 𝝉𝒓 𝚽𝐫𝐪 − 𝝎𝒔 𝑳𝒔 𝝈𝒔 𝒊𝒔𝒒 − 𝑳 𝝎𝒔 𝜱𝒓𝒒
𝐝𝐭 𝒓 𝝉𝒓 𝒓
𝒅𝐢𝐬𝒒 𝑴 𝑴
𝒗𝒔𝒒 = 𝑹𝒔 𝒊𝒔𝒒 + 𝑳𝒔 𝝈𝒔 +𝑳 𝑴𝒊𝒔𝒒 − 𝝎𝒓 𝝉𝒓 𝚽𝐫𝐝 − 𝚽𝐫𝐪 + 𝝎𝒔 𝑳𝒔 𝝈𝒔 𝒊𝒔𝒅 + 𝑳 𝝎𝒔 𝜱𝒓𝒅
𝐝𝐭 𝒓 𝝉𝒓 𝒓
𝒅𝚽𝐫𝐝 𝟏
= 𝑴𝒊𝒔𝒅 − 𝜱𝒓𝒅 + 𝝎𝒓 𝝉𝒓 𝝓𝒓𝒒
𝐝𝐭 𝝉𝒓
𝒅𝚽𝐫𝒒 𝟏
= 𝑴𝒊𝒔𝒒 − 𝝎𝒓 𝝉𝒓 𝚽𝐫𝐝 − 𝚽𝐫𝐪
𝐝𝐭 𝝉𝒓
𝟑𝑷
𝑻𝒆𝒎 = 𝑴(𝚽𝐫𝒅 𝒊𝒔𝒒 − 𝚽𝒓𝒒 𝒊𝒔𝒅 )
𝟐𝑳𝒓
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Modélisation
Modèle dynamique général de la MAS à cage dans le repère d-q
𝒅𝐢𝐬𝒅 𝟏 𝑴𝟐 𝑴 𝑴 𝟏
= −𝑹𝒔 − 𝒊𝒔𝒅 + 𝝎𝒔 𝒊𝒔𝒒 + 𝚽 + (𝝎𝒔 − 𝝎𝒓 ) 𝜱𝒓𝒒 + 𝒗
𝐝𝐭 𝑳𝒔 𝝈𝒔 𝑳𝒓 𝝉𝒓 𝑳𝒓 𝑳𝒔 𝝈𝒔 𝝉𝒓 𝐫𝒅 𝑳𝒓𝑳𝒔 𝝈𝒔 𝑳𝒔 𝝈𝒔 𝒔𝒅
𝒅𝐢𝐬𝒒 𝟏 𝑴𝟐 𝑴 𝑴 𝟏
= −𝝎𝒔 𝒊𝒔𝒅 + −𝑹𝒔 − 𝒊 − 𝝎 − 𝝎𝒓 𝜱𝒓𝒅 + 𝚽 + 𝒗
𝐝𝐭 𝑳𝒔 𝝈 𝒔 𝑳𝒓 𝝉𝒓 𝒔𝒒 𝑳𝒓 𝑳𝒔 𝝈𝒔 𝒔 𝑳𝒓 𝑳𝒔 𝝈𝒔 𝝉𝒓 𝐫𝒒 𝑳𝒔 𝝈𝒔 𝒔𝒒
𝒅𝚽𝐫𝐝 𝑴 𝟏
= 𝒊𝒔𝒅 − 𝜱𝒓𝒅 + 𝝎𝒓 𝝉𝒓 𝝓𝒓𝒒
𝐝𝐭 𝝉𝒓 𝝉𝒓
𝒅𝚽𝐫𝒒 𝑴 𝟏
= 𝒊𝒔𝒒 −𝝎𝒓 𝜱𝒓𝒅 − 𝚽𝐫𝐪
𝐝𝐭 𝝉𝒓 𝝉𝒓
𝟑𝑷
𝑻𝒆𝒎 = 𝑴(𝚽𝐫𝒅 𝒊𝒔𝒒 − 𝚽𝒓𝒒 𝒊𝒔𝒅 )
𝟐𝑳𝒓
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Commande vectorielle d’une MAS
❑ Architecture pour la commande vectorielle d’une machine asynchrone triphasée (MAS)
𝑖𝑐 𝑡
𝜃 𝑡
Polytech Nantes Pr. Echalih Salwa
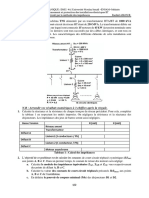
Moteur asynchrone Commande vectorielle de la MAS
❖ Principe du contrôle vectoriel de la machine asynchrone
Pour contrôler la vitesse ou la position d’un système d’entrainement électromécanique, il faut être capable de
maitriser parfaitement le couple instantané fourni par le moteur électrique.
Expression du couple instantané: 𝟑𝑷
𝑻𝒆𝒎 = 𝑴(𝚽𝐫𝒅 𝒊𝒔𝒒 − 𝚽𝒓𝒒 𝒊𝒔𝒅 )
𝟐𝑳𝒓
Question : Est-il possible de simplifier cette expression par un choix judicieux du positionnement du repère d-q
pour se ramener à celle d’une machine à courant continu (commande simple)?
⬧ Si on réussit à éliminer le deuxième terme (𝚽𝒓𝒒 𝒊𝒔𝒅 ) de l’expression du couple, alors on obtient
une expression similaire à celle d’une MCC ou d’une MSAP → flux × courant.
⬧ Pour cela, il faut choisir convenablement l'angle de rotation de Park 𝜃𝑠 𝑡 de sorte que le courant
magnétisant rotorique soit entièrement porté sur l'axe direct (d) et donc d'avoir Φ𝑟𝑞 = 0.
Polytech Nantes Pr. Echalih Salwa
Moteur asynchrone Commande vectorielle de la MAS
❖ Principe du contrôle vectoriel de la machine asynchrone
d
q
Φ𝑟
d q
Φ𝑟𝑞 Φ𝑟𝑑 = Φ𝑟
Φ𝑟𝑑
𝜃𝑠
𝜃𝑠 Φ𝑟𝑞 = 0
Contrôle par orientation du flux rotorique
𝟑 𝟑
𝑻𝒆𝒎 = 𝑷𝑴 𝚽𝒓𝒅 𝒊𝒔𝒒 − 𝚽𝒓𝒒 𝒊𝒔𝒅 𝑻𝒆𝒎 = 𝑷𝑴𝚽𝒓𝒅 𝒊𝒔𝒒 = 𝑲𝒕 𝒊𝒔𝒒
𝟐𝑳𝒓 𝟐
- Le courant 𝑖𝑠𝑞 𝑡 permettra de contrôler le couple.
- Il faudra maitriser à chaque instant la position du repère de
Park pour imposer Φ𝑟𝑞 = 0
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle de la MAS
❖ Simplification des équations si le repère d-q est fixe
𝒅𝐢𝐬𝒅 𝟏 𝑴𝟐 𝑴 𝑴 𝟏
= −𝑹𝒔 − 𝒊𝒔𝒅 + 𝝎𝒔 𝒊𝒔𝒒 + 𝚽 + (𝝎𝒔 − 𝝎𝒓 ) 𝜱𝒓𝒒 + 𝒗
𝐝𝐭 𝑳𝒔 𝝈𝒔 𝑳𝒓 𝝉𝒓 𝑳𝒓 𝑳𝒔 𝝈𝒔 𝝉𝒓 𝐫𝒅 𝑳𝒓𝑳𝒔 𝝈𝒔 𝑳𝒔 𝝈𝒔 𝒔𝒅
𝒅𝐢𝐬𝒒 𝟏 𝑴𝟐 𝑴 𝑴 𝟏
= −𝝎𝒔 𝒊𝒔𝒅 + −𝑹𝒔 − 𝒊 − 𝝎 − 𝝎𝒓 𝜱𝒓𝒅 + 𝚽 + 𝒗
𝐝𝐭 𝑳𝒔 𝝈 𝒔 𝑳𝒓 𝝉𝒓 𝒔𝒒 𝑳𝒓 𝑳𝒔 𝝈𝒔 𝒔 𝑳𝒓 𝑳𝒔 𝝈𝒔 𝝉𝒓 𝐫𝒒 𝑳𝒔 𝝈𝒔 𝒔𝒒
𝒅𝚽𝐫𝐝 𝑴 𝟏
= 𝒊𝒔𝒅 − 𝜱𝒓𝒅 + 𝝎𝒓 𝝉𝒓 𝝓𝒓𝒒
𝐝𝐭 𝝉𝒓 𝝉𝒓
𝒅𝚽𝐫𝒒 𝑴 𝟏
= 𝒊𝒔𝒒 −𝝎𝒓 𝜱𝒓𝒅 − 𝚽𝐫𝐪
𝐝𝐭 𝝉𝒓 𝝉𝒓
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle de la MAS
❖ Simplification des équations si le repère d-q est fixe
𝒅𝐢𝐬𝒅 𝟏 𝑴𝟐 𝑴 𝟏
= −𝑹𝒔 − 𝒊𝒔𝒅 + 𝝎𝒔 𝒊𝒔𝒒 + 𝚽𝐫𝒅 + 𝒗
𝐝𝐭 𝑳𝒔 𝝈 𝒔 𝑳𝒓 𝝉𝒓 𝑳𝒓 𝑳𝒔 𝝈𝒔 𝝉𝒓 𝑳𝒔 𝝈𝒔 𝒔𝒅
𝒅𝐢𝐬𝒒 𝟏 𝑴𝟐 𝑴 𝟏
= −𝑹𝒔 − 𝒊𝒔𝒒 − 𝝎𝒔 𝒊𝒔𝒅 − 𝝎𝒔 − 𝝎𝒓 𝜱𝒓𝒅 + + 𝒗
𝐝𝐭 𝑳𝒔 𝝈 𝒔 𝑳𝒓 𝝉𝒓 𝑳𝒓 𝑳𝒔 𝝈𝒔 𝑳𝒔 𝝈𝒔 𝒔𝒒
𝒅𝚽𝐫𝐝 𝑴 𝟏
= 𝒊𝒔𝒅 − 𝜱𝒓𝒅
𝐝𝐭 𝝉𝒓 𝝉𝒓
𝑴
𝟎 = 𝒊𝒔𝒒 −𝝎𝒓 𝜱𝒓𝒅
𝝉𝒓
𝟑𝑷
𝑻𝒆𝒎 = 𝑴(𝚽𝐫𝒅 𝒊𝒔𝒒 )
𝟐𝑳𝒓
Cette technique de commande nécessite une bonne connaissance de la position et l'amplitude
du flux à orienter a chaque instant.
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle de la MAS Commande vectorielle directe (CVD)
Pour la commande vectorielle directe CVD le module du flux et sa phase sont estimés en utilisant
un modèle dynamique ou électriquement par capteur physique de flux. L’utilisation d'un modèle
dynamique s’effectue à partir de la mesure des grandeurs statoriques (courant et tension).
∗
𝑇𝑒𝑚 ∗
Ω∗ vsd
Bloc Park Onduleur
MAS
∗
vsq inverse à MLI
Ω ∗ DFOC
𝜙rd
Défluxage
𝜃መ𝑠
𝑣𝑠𝑑𝑞
rd
Φ Estimation ou 𝑖𝑠𝑑𝑞 Park
mesure de flux
Schéma de principe de la commande vectorielle directe
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle de la MAS Commande vectorielle directe (CVD)
Les capteurs physiques permettant d’avoir des mesures directes du flux, ils sont placés
convenablement dans l'entrefer. Ces capteurs peuvent être :
Des capteurs à effet hall placés sous les dents du stator, ils donnent les valeurs locales du flux,
ils sont mécaniquement fragiles et ne peuvent pas travailler dans les conditions de sévères telles
que les vibrations et les échauffements excessifs.
Une mauvaise identification de module de flux et sa phase ⟹ conduit un découplage entre le
flux et le couple n’est pas exact
Solution
Observateur/ estimateur ⟹ besoin de connaitre l’amplitude de flux
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle de la MAS Commande vectorielle indirecte (CVI)
la commande vectorielle indirecte CVI consiste à calculer la position du flux à partir d’une relation donnant
la vitesse de glissement orienté et la position du rotor.
Relation autopilotage: 𝑴𝒊𝒔𝒒
𝜽𝒔 = 𝜽 + න 𝒅𝒕
𝝉𝒓 𝚽𝒓𝒅
Tr. de Laplace
𝒅𝚽𝐫𝐝 𝟏 𝐌 𝟏
= 𝑴𝒊𝒔𝒅 − 𝜱𝒓𝒅 ⇒ 𝚽𝐫𝐝 = 𝒊 𝟎= 𝑴𝒊𝒔𝒒 − 𝝎𝒓 𝝉𝒓 𝚽𝐫𝐝
𝐝𝐭 𝝉𝒓 𝟏 + 𝒑𝝉𝒓 𝒔𝒅 𝝉𝒓
𝑑Φ𝑟𝑑 𝑴𝒊𝒔𝒒
En régime permanent =0 𝝎𝒓 = 𝝉
𝑑𝑡 𝒓 𝚽𝒓𝒅
𝚽𝒓𝒅 = 𝑴𝒊𝒔𝒅
∫
La composante d’axe d du courant statorique
(𝑖𝑠𝑑 ) permettra de contrôler le flux (Φ𝑟𝑑 ) dans 𝝎𝒔 = 𝑷𝛀 + 𝝎𝒓
la machine (contrôle indirect du flux)
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle de la MAS Commande vectorielle indirecte (CVI)
Contrôle indirect du flux par 𝑖𝑠𝑑
Tr. de Laplace 𝒊𝒔𝒅 𝑀 𝚽𝐫𝐝
𝒅𝚽𝐫𝐝 𝟏 𝐌
= 𝑴𝒊𝒔𝒅 − 𝜱𝒓𝒅 ⇒ 𝚽𝐫𝐝 = 𝒊 1 + 𝑝𝜏𝑟
𝐝𝐭 𝝉𝒓 𝟏 + 𝒑𝝉𝒓 𝒔𝒅
/ flux
Le courant 𝒊𝒔𝒅 permet de fixer le flux dans la machine (𝑖𝑠𝑑 𝑟𝑒𝑓 ) : il faut attendre 3𝜏𝑟 pour que le flux (Φ𝑟𝑑 )
s’établisse avant d’imposer une référence de couple par l’intermédiaire du courant 𝑖𝑠𝑞 .
3𝑃𝑀
À 𝑡 = 3𝜏𝑟 ⇒ Φ𝑟𝑑 = 𝑀𝑖𝑠𝑑 𝑟𝑒𝑓 𝑇𝑒𝑚 = 𝑀𝑖𝑠𝑑 𝑟𝑒𝑓 𝑖𝑠𝑞 = 𝐾𝑡 𝑖𝑠𝑞
2𝐿𝑟
On peut faire un contrôle direct de 𝚽𝒓𝒅 mais cela est rarement fait en pratique car il faut estimer 𝜱𝒓𝒅 qui est non mesurable
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle de la MAS Commande vectorielle indirecte (CVI)
Schéma de principe de la commande vectorielle indirecte (contrôle de flux par 𝑖𝑠𝑑 )
𝑖𝑠𝑞
∗
∗
𝑖𝑠𝑞 vsd
Ω∗ +- C(p)Ω C(p)𝑖𝑠𝑞
Onduleur
Bloc
∗
vsq Park MAS
Ω à MLI
inverse
IFOC
Défluxage 𝜃𝑟 𝜃𝑠
++
∗
𝟏
𝑖𝑠𝑑 𝑖𝑎𝑏𝑐
𝐶 𝑝 𝑖𝑠𝑑
∗ 𝑴 𝑖𝑠𝑑
𝜙rd Park
𝑖𝑠𝑑 𝜃 𝑖𝑠𝑞
∫ P
La signification de la méthode indirecte, est la possibilité d'éliminer l'estimateur du flux mais elle exige
la présence d'un capteur de position du rotor.
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle de la MAS Commande vectorielle indirecte (CVD)
1
Le courant 𝑖𝑠𝑑 permet de fixer le flux dans la machine (𝑖𝑠𝑑𝑟𝑒𝑓 ): 𝑖𝑠𝑑 𝑟𝑒𝑓 = 𝑀 Φ𝑟𝑑 𝑟𝑒𝑓
𝟑
𝑻𝒆𝒎 = 𝑷𝑴𝚽𝒓𝒅 𝒓𝒆𝒇 𝒊𝒔𝒒 Le courant 𝑖𝑠𝑞 permet de contrôler le couple
𝟐𝑳𝒓
𝑴𝒊𝒔𝒒
𝜽𝒔 = 𝑷𝜽 + න 𝒅𝒕 Angle de positionnement de repère 𝜃𝑠
𝝉𝒓 𝚽𝒓𝒅
𝑻𝒆𝒎 𝟐 𝑳𝒓
𝟑 𝑷𝑴𝜱𝒓𝒒 𝒓𝒆𝒇
𝑴𝒊𝒔𝒒
𝜽𝒔 = 𝜽 + න 𝒅𝒕
𝝉𝒓 𝚽𝒓𝒅
Schéma de la commande vectorielle indirect (contrôle de flux par 𝑖𝑠𝑑 )
Polytech Nantes Pr. Echalih Salwa
Découplage par compensation et contrôle de
Commande vectorielle du MAS courant
On a:
𝑀2 𝑑is𝑑 𝑀
𝑣𝑠𝑑 = (𝑅𝑠 + )𝑖𝑠𝑑 + 𝐿𝑠 𝜎𝑠 − 𝜔𝑠 𝐿𝑠 𝜎𝑠 𝑖𝑠𝑞 − Φ
𝐿 𝑟 𝜏𝑟 dt 𝐿𝑟 𝜏𝑟 r𝑑
𝑀2 𝑑is𝑞 𝑀
𝑣𝑠𝑞 = (𝑅𝑠 + )𝑖𝑠𝑞 + 𝐿𝑠 𝜎𝑠 + 𝜔𝑠 𝐿𝑠 𝜎𝑠 𝑖𝑠𝑑 + 𝜔 − 𝜔𝑟 𝛷𝑟𝑑
𝐿 𝑟 𝜏𝑟 dt 𝐿𝑟 𝑠
𝑴
𝟎= 𝒊 − 𝝎𝒓 𝜱𝒓𝒅
𝝉𝒓 𝒔𝒒
𝑀2 𝑑is𝑞 𝑀 𝑀2
𝑣𝑠𝑞 = (𝑅𝑠 + )𝑖 + 𝐿𝑠 𝜎𝑠 + 𝜔𝑠 𝐿𝑠 𝜎𝑠 𝑖𝑠𝑑 + 𝜔𝑠 𝛷𝑟𝑑 − 𝑖
𝐿𝑟 𝜏𝑟 𝑠𝑞 dt 𝐿𝑟 𝐿𝑟 𝜏𝑟 𝑠𝑞
𝑑is𝑞 𝑀
𝑣𝑠𝑞 = 𝑅𝑠 𝑖𝑠𝑞 + 𝐿𝑠 𝜎𝑠 + 𝜔𝑠 𝐿𝑠 𝜎𝑠 𝑖𝑠𝑑 + 𝜔𝑠 𝛷𝑟𝑑
dt 𝐿𝑟
Polytech Nantes Pr. Echalih Salwa
Découplage par compensation et contrôle de
Commande vectorielle du MAS courant
On a:
𝑀2 𝑑is𝑑 𝑀 𝑑is𝑞 𝑀
𝑣𝑠𝑑 = (𝑅𝑠 + )𝑖𝑠𝑑 + 𝐿𝑠 𝜎𝑠 − 𝜔𝑠 𝐿𝑠 𝜎𝑠 𝑖𝑠𝑞 − Φ 𝑣𝑠𝑞 = 𝑅𝑠 𝑖𝑠𝑞 + 𝐿𝑠 𝜎𝑠 + 𝜔𝑠 𝐿𝑠 𝜎𝑠 𝑖𝑠𝑑 + 𝜔𝑠 𝛷𝑟𝑑
𝐿 𝑟 𝜏𝑟 dt 𝐿𝑟 𝜏𝑟 r𝑑 dt 𝐿𝑟
On définit les termes de couplage entre les deux axes (perturbations):
𝑀 𝑀
Φ 𝑒𝑠𝑞 = 𝜔𝑠 𝐿𝑠 𝜎𝑠 𝑖𝑠𝑑 + 𝜔𝛷
𝑒𝑠𝑑 = −𝜔𝑠 𝐿𝑠 𝜎𝑠 𝑖𝑠𝑞 −
𝐿𝑟 𝜏𝑟 r𝑑 𝐿𝑟 𝑠 𝑟𝑑
On peut négliger l’impact de 𝜱𝒓𝒅 car sa variation est très Comme le flux doit être fixé avant le contrôle du couple,
lente (temps de réponse égale 3𝜏𝑟 par rapport à 𝑖𝑠𝑑 ). Si on on suppose que 𝚽𝒓𝒅 est établi avant toute variation sur
veut en tenir compte, on peut l’estimer (non mesurable). 𝒊𝒔𝒒 , on a alors 𝚽𝒓𝒅 = 𝑴𝒊𝒔𝒅 (sinon on peut estimer…):
𝑒𝑠𝑞 = 𝜔𝑠 𝐿𝑠 𝜎𝑠 𝑖𝑠𝑑 + (1 − 𝜎𝑠 )𝐿𝑠 𝜔𝑠 𝑖𝑠𝑑
𝒆𝒔𝒅 ≈ −𝝎𝒔 𝑳𝒔 𝝈𝒔 𝒊𝒔𝒒
𝒆𝒔𝒒 = 𝝎𝒔 𝑳𝒔 𝒊𝒔𝒅
𝑴𝟐 𝒅𝒊𝒔𝒅 𝒅𝒊𝒔𝒒
𝒗𝒔𝒅 = (𝑹𝒔 + )𝒊𝒔𝒅 + 𝑳𝒔 𝝈𝒔 + 𝒆𝒔𝒅 𝒗𝒔𝒒 = 𝑹𝒔 𝒊𝒔𝒒 + 𝑳𝒔 𝝈𝒔 + 𝒆𝒔𝒒
𝑳𝒓 𝝉𝒓 𝒅𝒕 𝒅𝒕
Polytech Nantes Pr. Echalih Salwa
Découplage par compensation et contrôle de
Commande vectorielle du MAS courant
▪ Découplage par compensation
On définit les termes de découplage suivants:
𝒆 𝒔𝒅 = 𝝎𝒔 𝑳𝒒 𝝈𝒔 𝒊𝒔𝒒
𝒆 𝒔𝒒 = −𝝎𝒔 𝑳𝒔 𝒊𝒔𝒅
On peut alors définir deux nouvelles variables de commande 𝒗𝒔𝒅𝟏 et 𝒗𝒔𝒒𝟏 telles que:
𝒅𝒊𝒔𝒅
𝒗𝒔𝒅𝟏 = 𝑹𝒆𝒒 𝒊𝒔𝒅 + 𝑳𝒔 𝝈𝒔
𝒅𝒕 𝑀2
Avec : 𝑅𝑠 + 𝐿𝑟 𝜏𝑟
𝒅𝒊𝒔𝒒
𝒗𝒔𝒒𝟏 = 𝑹𝒔 𝒊𝒔𝒒 + 𝑳𝒔 𝝈𝒔
𝒅𝒕
Polytech Nantes Pr. Echalih Salwa
Découplage par compensation et contrôle de
Commande vectorielle du MAS courant
Les perturbation 𝒆𝒔𝒅 et 𝒆𝒔𝒒 sont compensées par 𝒆 𝒔𝒅 et 𝒆 𝒔𝒒 de manière à ce que les fonctions de transfert
équivalentes:
𝒊𝒔𝒅 𝟏
𝒗𝒔𝒅𝟏 = (𝑹𝒆𝒒 +𝝈𝒔 𝑳𝒔 . 𝒑)𝒊𝒔𝒅 =
𝒗𝒔𝒅𝟏 𝑹𝒆𝒒 + 𝝈𝒔 𝑳𝒔 . 𝒑
𝒊𝒔𝒒 𝟏
𝒗𝒔𝒒𝟏 = (𝑹𝒆𝒒 +𝝈𝒔 𝑳𝒔 . 𝒑)𝒊𝒔𝒒 =
𝒗𝒔𝒒𝟏 𝑹𝒔 + 𝝈𝒔 𝑳𝒔 . 𝒑
Les tensions directe et quadratique 𝑣𝑆𝑑 et 𝑣𝑠𝑞 sont alors:
𝒗𝒔𝒅 = 𝒗𝒔𝒅𝟏 − 𝒆 𝒔𝒅
𝒗𝒔𝒒 = 𝒗𝒔𝒒𝟏 − 𝒆 𝒔𝒒
Polytech Nantes Pr. Echalih Salwa
Découplage par compensation et contrôle de
Commande vectorielle du MAS courant
𝑖𝑠𝑞 𝜔𝑠
Compensateur
d’axe d
𝑒ǁ𝑠𝑑 𝑒ǁ𝑠𝑑
∗
∗ 𝑣𝑠𝑑1 𝑣𝑠𝑑 1
𝑖𝑠𝑑 +- 𝐶 𝑝 𝑑 +- ++ 𝑖𝑠𝑑
𝑅𝑒𝑞 + 𝜎𝑠 𝐿𝑠 . 𝑝
𝑒ǁ𝑠𝑞
∗ 𝑣𝑠𝑞1 𝑣𝑠𝑞∗ 1
𝑖𝑠𝑞 +- 𝐶 𝑝 + +
+ 𝑖𝑠𝑞
𝑞 - 𝑅𝑠 + 𝜎𝑠 𝐿𝑠 . 𝑝
𝑒ǁ𝑠𝑞
Correction + découplage
Compensateur
d’axe q
𝑖𝑠𝑑 𝜔𝑠
Polytech Nantes Pr. Echalih Salwa
Découplage par compensation et contrôle de
Commande vectorielle du MAS courant
Synthèse du correcteur de courant d’axe d (contrôle du flux)
Le correcteur PI de courant selon l’axe d:
∗ 𝑣𝑠𝑑1 𝟏 1+𝜏𝑖 𝑝
𝑖𝑠𝑑 +-
𝒌𝒊𝒅 𝑖𝑠𝑑 𝐶 𝑆 𝑑 = 𝑘𝑝𝑑 , 𝜏𝑖𝑑 = 𝑘𝑝𝑑 /𝑘𝑖𝑑
𝒌𝒑𝒅 + 𝑹𝒆𝒒 + 𝝈𝒔 𝑳𝒔 . 𝒑 𝜏𝑖 𝑝
𝒑
La fonction de transfert en boucle ouverte du courant selon d:
1 + 𝜏𝑖𝑑 𝑝 1/𝑅𝑒𝑞
𝐹𝑇𝐵𝑂 𝑝 𝑑 = 𝑘𝑝𝑑 ∗
𝜏𝑖𝑑 𝑝 𝜎𝐿
1 + 𝑅𝑠 𝑠 . 𝑝
𝑒𝑞
𝜎𝑠 𝐿𝑠
En appliquant la méthode de déplacement de pôle, on compense le pôle dominant: 𝜏𝑖𝑑 =
𝑅𝑒𝑞
1 + 𝜏𝑖𝑑 𝑝 1/𝑅𝑒𝑞 𝑘𝑝𝑑 1
𝐹𝑇𝐵𝑂(𝑝)𝑑 = 𝑘𝑝𝑑 ∗ 𝐹𝑇𝐵𝑂(𝑝)𝑑 = ∗
𝜏𝑖𝑑 𝑝 𝜎𝐿 𝑅𝑒𝑞 𝜏𝑖𝑑 𝑝
1 + 𝑅𝑠 𝑠 . 𝑝
𝑒𝑞
Polytech Nantes Pr. Echalih Salwa
Découplage par compensation et contrôle de
Commande vectorielle du MAS courant
Synthèse du correcteur de courant d’axe d (contrôle du flux)
En boucle fermée, on a :
1 1 1
𝐹𝑇𝐵𝐹 𝑆 𝑑 = = =
1 𝜏𝑖𝑑 𝑅𝑒𝑞 1 + 𝜏𝐵𝐹1 . 𝑝
1+ 1+ .𝑝
𝐻 𝑠 𝐵𝑂 𝑘𝑝𝑑
𝜏𝐵𝐹1 est la constante du temps en boucle fermée.
𝑅𝑒𝑞 𝜏𝑖𝑑 𝜎𝑠 𝐿𝑠 𝜎𝑠 𝐿𝑠
𝜏𝐵𝐹1 = avec 𝜏𝑖𝑑 = ⇒ 𝑘𝑝𝑑 =
𝑘𝑝𝑑 𝑅𝑒𝑞 𝜏𝐵𝐹1
𝑅𝑒𝑞
𝜏𝑖𝑑 = 𝑘𝑝𝑑 /𝑘𝑖𝑑 ⇒ 𝑘𝑖𝑑 =
𝜏𝐵𝐹1
Polytech Nantes Pr. Echalih Salwa
Découplage par compensation et contrôle de
Commande vectorielle du MAS courant
Synthèse du correcteur de courant d’axe q (contrôle du couple)
Le correcteur PI de courant selon l’axe q:
∗ 𝒌𝒊𝒅
𝑣𝑠𝑞1 𝟏 1+𝜏𝑖𝑞 𝑝
𝑖𝑠𝑞 +- 𝒌𝒑𝒅 +
𝑖𝑠𝑞 𝐶 𝑆 𝑑 = 𝑘𝑝𝑞 , 𝜏𝑖𝑞 = 𝑘𝑝𝑞 /𝑘𝑖𝑞
𝑹𝒔 + 𝝈𝒔 𝑳𝒔 𝒑 𝜏𝑖𝑞 𝑝
𝒑
La fonction de transfert en boucle ouverte du courant selon q:
1 + 𝜏𝑖𝑞 𝑝 1/𝑅𝑠
𝐹𝑇𝐵𝑂 𝑝 𝑞 = 𝑘𝑝𝑞 ∗
𝜏𝑖𝑞 𝑝 𝜎𝑠 𝐿𝑠
1+ 𝑅 𝑝
𝑠
𝜎𝑠 𝐿𝑠
En appliquant la méthode de déplacement de pôle, on compense le pôle dominant: 𝜏𝑖𝑞 =
𝑅𝑠
1 + 𝜏𝑖 𝑝 1/𝑅𝑠 𝑘𝑝𝑞 1
𝐹𝑇𝐵𝑂(𝑝)𝑞 = 𝑘𝑝𝑞 ∗ 𝐹𝑇𝐵𝑂(𝑝)𝑞 = ∗
𝜏𝑖𝑞 𝑝 𝜎𝐿
1 + 𝑠 𝑠 .𝑝 𝑅𝑠 𝜏𝑖𝑞 𝑝
𝑅𝑠
Polytech Nantes Pr. Echalih Salwa
Découplage par compensation et contrôle de
Commande vectorielle du MAS courant
Synthèse du correcteur de courant d’axe q (contrôle du couple)
En boucle fermée, on a :
1 1 1
𝐹𝑇𝐵𝐹 𝑝 𝑞 = = =
1 𝜏𝑖𝑞 𝑅𝑠 1 + 𝜏𝐵𝐹2 . 𝑝
1+ 1+ .𝑝
𝐻 𝑝 𝐵𝑂 𝑘𝑝𝑑
𝜏𝐵𝐹2 est la constante du temps en boucle fermée.
𝑅𝑠 𝜏𝑖𝑞 𝜎𝑠 𝐿𝑠 𝜎𝑠 𝐿𝑠
𝜏𝐵𝐹2 = avec 𝜏𝑖𝑞 = ⇒ 𝑘𝑝𝑞 =
𝑘𝑝 2 𝑞 𝑅𝑠 𝜏𝐵𝐹2
𝑅𝑠
𝜏𝑖𝑞 = 𝑘𝑝𝑞 /𝑘𝑖𝑞 ⇒ 𝑘𝑖𝑞 =
𝜏𝐵𝐹2
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle du MAS Correcteur de vitesse
Synthèse du correcteur PI de vitesse:
𝑇𝐿
Boucle interne de courant 𝑖𝑞
∗ 𝑖𝑠𝑞 𝑻𝒆𝒎 𝟏 Ω
Ω∗ 𝒌𝒊𝛀 𝑖𝑠𝑞 +-
+- 𝒌𝒑𝛀 + +- 𝑮(𝒔) 𝑲𝒕 𝑱. 𝒑 + 𝒇
𝒑
Comme la boucle de courant répond avec une erreur nulle et très rapidement par rapport
à la dynamique de la vitesse, on peut la modéliser par un gain unitaire
Boucle interne de courant 𝐼𝑞
𝐼𝑞 ∗ 𝑖𝑠𝑞
𝑖𝑞∗ 𝑖𝑠𝑞
+- 𝑮(𝒔) 𝟏
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle du MAS Correcteur de vitesse
Conception du correcteur PI de vitesse:
Le schéma bloc de régulation de vitesse peut être représenté par le schéma suivant:
𝑇𝐿
∗
𝑖𝑠𝑞 𝑻𝒆𝒎 Ω 𝟑
Ω∗ 𝒌𝒊𝛀 +-
𝟏 Gain du couple: 𝑲𝒕 = 𝟐𝑳 . 𝑷. 𝑴. 𝚽𝒓𝒅 𝒓𝒆𝒇
+- 𝒌𝒑𝛀 + 𝑲𝒕 𝑱. 𝒑 + 𝒇 𝒓
𝒑
▪ La fonction de transfert en boucle ouverte (𝑇𝐿 = 0)
𝑘𝑖𝛺 1
GΩBO 𝑝 = 𝑘𝑝𝛺 + ∗ 𝐾𝑡 ∗
𝑝 𝐽. 𝑝 + 𝑓
1 + 𝑘𝑝𝛺 /𝑘𝑖Ω 𝑝 1/𝑓
GΩBO s = 𝑘𝑖𝛺 𝐾𝑡
𝑝 𝐽
1+ .𝑝
𝑓
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle du MAS Correcteur de vitesse
Conception du correcteur PI de vitesse:
𝑇𝐿
∗
𝑖𝑠𝑞 𝑻∗𝒆𝒎 Ω
Ω∗ 𝒌𝒊𝛀 +-
𝟏 𝟑
+- 𝒌𝒑𝛀 + 𝑲𝒕 𝑱. 𝒑 + 𝒇 Gain du couple: 𝑲𝒕 = 𝟐𝑳 . 𝑷. 𝑴. 𝜱𝒓𝒅 𝒓𝒆𝒇
𝒑 𝒓
▪ En boucle fermée:
𝑘𝑖Ω 𝐾𝑡 𝑘𝑝Ω
𝐽 ∗ 1 + 𝑘𝑖Ω 𝑝 𝐾𝜔02
GΩBF p = = 2
𝑓 + 𝐾𝑡 𝑘𝑝Ω 𝐾𝑡 𝑘𝑖Ω 𝑝 + 2𝜉𝜔0 𝑝 + 𝜔02
𝑝2 + 𝑝 +
𝐽 𝐽
Par identification: 𝑦
2
𝐾𝑡 𝑘𝑖Ω 𝟐
𝑱 𝒚
𝑡𝑟 5% . 𝜔0 = 𝑦 ⇒ = 𝒌𝒊𝜴 =
𝐾𝑡 𝑘iΩ 𝑡𝑟 𝐽 𝑲𝒕 𝒕𝒓
𝜔02 = ⇒
𝐽 𝒚
𝟐. 𝑱. 𝝃. 𝒕 − 𝒇
𝑓 + 𝐾𝑡 𝑘𝑝Ω 𝒓
𝒌𝒑𝛀 =
2𝜉𝜔0 = 𝑲𝒕
𝐽
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle du MAS Correcteur de vitesse
⬧ Erreur statique nulle (échelon) → grâce au PI
⬧ Temps de réponse à 5% : 𝑡𝑟 (5%) = 0,5s
⬧ Système le plus rapide sans dépassement : impose 𝜉 = 1
𝒕𝒓(𝟓%) 𝝎𝟎 𝜉 = 1 → 𝑡𝑟 5% 𝜔0 = 5 soit 𝜔0 = 10 rad/s
𝝃
𝝃=𝟏 2. 𝐽. 𝜉. 𝜔0 − 𝑓
𝑘𝑝Ω = = 0.4910
3 𝐾𝑡
𝐾𝑡 = 2𝐿 𝑃𝑀Φ𝑟𝑑 𝑟𝑒𝑓 = 1.22 𝑁𝑚/𝐴
𝑟
𝐽 2
𝑓= 1.10−3 𝑁𝑚𝑠/𝑟𝑎𝑑, 𝐽 = 0.03 𝑘𝑔𝑚2 𝑘𝑖𝛺 = 𝜔0 = 2.4590
𝐾𝑡
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle du MAS Structure globale du contrôle vectoriel indirect de la MAS
𝑣𝑠𝑑1
𝑒ǁ𝑠𝑑
𝑣𝑠𝑞1
𝑒ǁ𝑠𝑞
𝑀𝑖𝑠𝑞
𝜃𝑠 = 𝜃 + න 𝑑𝑡
𝜏𝑟 Φ𝑟𝑑
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle du MAS Structure globale du contrôle vectoriel indirect de la MAS
▪ On mesure les courants ( 𝑖𝑠𝑎 , 𝑖𝑠𝑏 , 𝑖𝑠𝑐 ) avec des
capteurs de courant à effet Hall.
▪ On mesure la position mécanique du rotor 𝜃 :
codeur incrémental.
▪ On calcule ( 𝑖𝑠𝑑 , 𝑖𝑠𝑞 ) à partir de ( 𝑖𝑠𝑎 , 𝑖𝑠𝑏 , 𝑖𝑠𝑐 ) : 𝑣𝑠𝑑1
transformation de Park.
▪ On effectue la régulation des courants 𝑖𝑠𝑑 , 𝑖𝑠𝑞 à 𝑒ǁ𝑠𝑑
l’aide de correcteurs PI (erreur statique nulle car 𝑖𝑠𝑑 𝑣𝑠𝑞1
et 𝑖𝑠𝑞 sont constants en régime établi); on intègre les
termes de découplage. 𝑒ǁ𝑠𝑞
▪ On effectue la régulation de vitesse à l’aide d’un 𝜃𝑠 = 𝜃 + න
𝑀𝑖𝑠𝑞
𝑑𝑡
correcteur PI: on limite la sortie du régulateur de 𝜏𝑟 Φ𝑟𝑑
vitesse à ±𝐼𝑠𝑞𝑟𝑒𝑓𝑚𝑎𝑥 pour éviter que le courant
statorique atteigne des valeurs excessives.
∗ ∗ ∗
▪ On calcule les références de tension (𝑣𝑠𝑎 , 𝑣𝑠𝑏 , 𝑣𝑠𝑐 )à
appliquer au moteur à partir des tensions ( partir
∗ ∗
de ( 𝑣𝑠𝑑 , 𝑣𝑠𝑞 ) issues des correcteur de courant
(transformation de Park inverse), On en déduit les
ordres de commande des IGBT (MLI) (𝑆𝑎 , 𝑆𝑏 , 𝑆𝑐 ).
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle du MAS Défluxage
Le moteur est dimensionné pour atteindre la tension nominale 𝑣𝑠𝑛 pour
le couple nominal 𝑇𝑛 et la vitesse nominale Ω𝑛 → puissance nominale.
Pour aller au-delà de Ω𝑛 , il faut « défluxer » la machine car on ne peut
plus augmenter la tension. On travaille alors à puissance apparente
constante (𝑖𝑠 = 𝑖𝑠𝑛 et 𝑣𝑠 = 𝑣𝑠𝑛 ).
A des vitesses inférieures ou égales à la vitesse nominale du moteur, le
flux est maintenu constant à sa valeur nominale, par contre, il faut qu’il
décroisse lorsque la vitesse augmente au-delà de la vitesse nominale
afin de limiter la tension aux bornes du moteur. Pour cela, il est utilisé
le bloc de défluxage qui est défini par la non-linéarité suivante
𝚽𝒓𝐧 Si 𝛀 ≤ 𝛀𝐧
∗
𝚽𝒓𝒅 =
𝛀𝐧
𝚽𝒓𝐧 Si 𝛀 > 𝛀𝐧
|𝛀|
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle du MAS Estimateur de flux
Le module du flux rotorique est estimé par la relation: 𝜔
ෝ𝑠 𝑖𝑠𝑑𝑞
Estimation ou
𝑴 𝜃መ𝑠 mesure de flux
𝒓𝒅 =
𝚽 𝒊 rd
𝝉𝒓 𝒔𝒅 Φ
𝑴
La pulsation 𝜔
ෝ𝑠 est obtenue par la combinaison de la loi d’autopilotage et 𝟎 = 𝒊𝒔𝒒 − 𝝎𝒓 𝜱𝒓𝒅
𝝉𝒓
𝑴
𝝎𝒔 = 𝝎 + 𝝎𝒓 = 𝑷𝛀 + 𝒊
𝝉𝒓 𝚽𝒓𝒅 𝒔𝒒
L’absence de flux au démarrage ne permet pas l’exploitation de cette relation en cet état, d’où la
modification suivante:
𝑴 Avec par exemple 𝜀 = 0.01
𝝎ෝ 𝒔 = 𝑷𝛀 + 𝒊𝒔𝒒
𝒓𝒅 + 𝜺
𝝉𝒓 𝜱
La position du flux rotorique sera obtenue par intégration de la pulsation statorique, soit :
𝒔 = න 𝝎
𝜽 ෝ𝒔
Polytech Nantes Pr. Echalih Salwa
Commande vectorielle du MAS Estimateur de flux
Schéma bloc de l’estimateur du vecteur flux rotorique
𝜏𝑟 𝜏𝑟
Polytech Nantes Pr. Echalih Salwa
Schéma de principe d’une commande vectorielle directe pour
moteur asynchrone
Vous aimerez peut-être aussi
- Questionnaire CorrigeDocument166 pagesQuestionnaire CorrigeYouman BIGG100% (13)
- 4 Transp CMD Vec Mas Master2 S3ea 2021 2022Document70 pages4 Transp CMD Vec Mas Master2 S3ea 2021 2022Dorsaf DorsafPas encore d'évaluation
- Slides de Présentation - Laboratoire Sur La MAS À CageDocument24 pagesSlides de Présentation - Laboratoire Sur La MAS À Cagelifeja5732Pas encore d'évaluation
- CCCT - MAS Partie 1Document56 pagesCCCT - MAS Partie 1fanny.menager8Pas encore d'évaluation
- Tpstabilitéangufinal 1Document14 pagesTpstabilitéangufinal 1الشاكر لله100% (1)
- QCM CorDocument5 pagesQCM Corhabibo 2009Pas encore d'évaluation
- Chapitre II - Machine Asynchrone - S4 - ETT4 - 2022Document34 pagesChapitre II - Machine Asynchrone - S4 - ETT4 - 2022Balayira BakaryPas encore d'évaluation
- Mini Projet Modélisation Des MASDocument20 pagesMini Projet Modélisation Des MASislambenhamidaPas encore d'évaluation
- CHAPITRE3 MOEUR AsynchroneDocument43 pagesCHAPITRE3 MOEUR AsynchroneMed ElkotbiPas encore d'évaluation
- Chapitre I - Machine Synchrone - S4 - ETT4 - 2022Document41 pagesChapitre I - Machine Synchrone - S4 - ETT4 - 2022Balayira BakaryPas encore d'évaluation
- Transmission de PuissanceDocument111 pagesTransmission de PuissanceSaley NouroudinePas encore d'évaluation
- Electro - Transformateur TriphaséDocument4 pagesElectro - Transformateur TriphasértuiojPas encore d'évaluation
- Turbomachines Thermiques III - Considérations Sur Le Dimensionnement Et Les Performances - Turbomachines AxialesDocument45 pagesTurbomachines Thermiques III - Considérations Sur Le Dimensionnement Et Les Performances - Turbomachines AxialesRialPas encore d'évaluation
- Chapitre 3 Regulation de La Vitesse Des Machines A Courant ContinuDocument7 pagesChapitre 3 Regulation de La Vitesse Des Machines A Courant Continuwalid aribiPas encore d'évaluation
- Modelisation de La MASDocument20 pagesModelisation de La MASsaadbaraa100% (1)
- Universite Sultan Moulay SlimaneDocument16 pagesUniversite Sultan Moulay SlimaneNadia ElbouaazzaouiPas encore d'évaluation
- Exercice 1 (Circuit RLC)Document6 pagesExercice 1 (Circuit RLC)Mohamed Soibaha Chaambane0% (2)
- TP 3 Commande Vectorielle Directe de La GadaDocument5 pagesTP 3 Commande Vectorielle Directe de La Gadatouatit tamerPas encore d'évaluation
- Moteurs Asynchrones Triphasés CorrigéDocument12 pagesMoteurs Asynchrones Triphasés Corrigéffa46701Pas encore d'évaluation
- TP 01 Avec Annexe PDFDocument11 pagesTP 01 Avec Annexe PDFLaila RabhiPas encore d'évaluation
- Simulation de La Machine Asynchrone en DQDocument7 pagesSimulation de La Machine Asynchrone en DQadil bakkariPas encore d'évaluation
- CH14Document6 pagesCH14AFAFPas encore d'évaluation
- CHAP3Document27 pagesCHAP3Abdellah El khamlichiPas encore d'évaluation
- Cours MAS 2024Document14 pagesCours MAS 2024NGUIE Innonge GrâcePas encore d'évaluation
- Commande Du Machine AsynchroneDocument16 pagesCommande Du Machine AsynchroneKhaireddine WeslatiPas encore d'évaluation
- TD Moteur AsynDocument4 pagesTD Moteur AsynYoussef NajihPas encore d'évaluation
- Cours Commande Chap4Document16 pagesCours Commande Chap4Youcef BistoPas encore d'évaluation
- tp°2COMMANDE VECTORILLE DIRACTEpdfDocument19 pagestp°2COMMANDE VECTORILLE DIRACTEpdfمكتبة الأمانيPas encore d'évaluation
- TP3 Commande Dune Machine McceDocument7 pagesTP3 Commande Dune Machine McceGhaffari WalidPas encore d'évaluation
- TP1 Commande en Boucle Ouverte de Lassociation Moteur Asynchrone-OnduleurDocument8 pagesTP1 Commande en Boucle Ouverte de Lassociation Moteur Asynchrone-OnduleurMohamed AbidPas encore d'évaluation
- ModelisationDocument23 pagesModelisationAymen43lal Aymen 43manPas encore d'évaluation
- CH18-C Machine AsynchroneDocument6 pagesCH18-C Machine Asynchroneyassirtm el outmani100% (1)
- Solution Ex01 TD2Document2 pagesSolution Ex01 TD2Ромаисса СамедPas encore d'évaluation
- TP CommondDocument8 pagesTP CommondBilal HBPas encore d'évaluation
- Oscillateurs Harmoniques Partie 2Document45 pagesOscillateurs Harmoniques Partie 2ilyass bkPas encore d'évaluation
- RlccoursDocument8 pagesRlccoursKamal KamalPas encore d'évaluation
- Tp3 Mas CaractDocument5 pagesTp3 Mas CaractDaly ZeddiniPas encore d'évaluation
- Chapitre-I Modélisation de La MASDocument14 pagesChapitre-I Modélisation de La MASSaliha ZmPas encore d'évaluation
- DL AutomatiqueDocument12 pagesDL AutomatiqueYouness AitetalbPas encore d'évaluation
- TD2 Dimensi Inst Elec BT Calcul Icc 2021Document2 pagesTD2 Dimensi Inst Elec BT Calcul Icc 2021younes boudounitPas encore d'évaluation
- Var - Chap - 3 - Modélisation Et Commande de MAS V1Document22 pagesVar - Chap - 3 - Modélisation Et Commande de MAS V1Gérald KIKIPas encore d'évaluation
- Moteur AsynchroneDocument61 pagesMoteur AsynchronesaidoualiPas encore d'évaluation
- Chapitre5 Syst Électrom ÉlectriqueDocument40 pagesChapitre5 Syst Électrom ÉlectriqueKader MekkiPas encore d'évaluation
- CHAP 7 ConducteurDocument14 pagesCHAP 7 ConducteurMaram DhahriPas encore d'évaluation
- CH08 PDFDocument4 pagesCH08 PDFFarid AfifiPas encore d'évaluation
- Manuel Exercices SolutionsDocument12 pagesManuel Exercices SolutionssaidPas encore d'évaluation
- Mon Cours DTCDocument2 pagesMon Cours DTCYounesPas encore d'évaluation
- Cours MAS RésuméDocument7 pagesCours MAS RésuméMak HimPas encore d'évaluation
- Cours Turbomachine PDFDocument18 pagesCours Turbomachine PDFGasmi KrPas encore d'évaluation
- COM ELNI MACHINE 2020 2021 EXAM CorrectionDocument5 pagesCOM ELNI MACHINE 2020 2021 EXAM CorrectionNguefa FabricePas encore d'évaluation
- Cours 1 Turbomachine 3 HCDocument8 pagesCours 1 Turbomachine 3 HCNak awadPas encore d'évaluation
- HDR Ouari KamelDocument48 pagesHDR Ouari KameljyPas encore d'évaluation
- CF 1730Document6 pagesCF 1730oussama messaoudiPas encore d'évaluation
- Chapitre 6 LET52Document8 pagesChapitre 6 LET52Lionel ThiombianoPas encore d'évaluation
- VACOALT1Document50 pagesVACOALT1Bruno LambertPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Corrélation croisée: Déverrouiller des modèles dans la vision par ordinateurD'EverandCorrélation croisée: Déverrouiller des modèles dans la vision par ordinateurPas encore d'évaluation
- Thermo ST 2018Document27 pagesThermo ST 2018benzedira yasminePas encore d'évaluation
- Etude D'un Groupe Electrogene - BOUCHRI Yousra - 2669 PDFDocument35 pagesEtude D'un Groupe Electrogene - BOUCHRI Yousra - 2669 PDFAZIZ50% (2)
- Correction Facteur de Puissance A L'entré D'un Concertisseur AC DCDocument134 pagesCorrection Facteur de Puissance A L'entré D'un Concertisseur AC DClibayagherbiPas encore d'évaluation
- Swot Total 2Document2 pagesSwot Total 2Wail Ben AbdenbiPas encore d'évaluation
- Fichesynthese Paulin Iuvtt 2021Document3 pagesFichesynthese Paulin Iuvtt 2021Yanis HadriPas encore d'évaluation
- TP D'électrotechnique: Onduleur Triphasé 24 VoltsDocument5 pagesTP D'électrotechnique: Onduleur Triphasé 24 VoltsJason BonePas encore d'évaluation
- CarnotDocument7 pagesCarnotHoussem Eddine KAFIPas encore d'évaluation
- TP6 Etude de La Génératrice À Excitation IndépendanteDocument3 pagesTP6 Etude de La Génératrice À Excitation Indépendantethieke0% (1)
- CRITT-ADEME Mesurecombustible PDFDocument62 pagesCRITT-ADEME Mesurecombustible PDFDaniel Cauich LópezPas encore d'évaluation
- Liebherr PDFDocument98 pagesLiebherr PDFTahar BenacherinePas encore d'évaluation
- Guide Anc Rages Pass If Sen MontagneDocument148 pagesGuide Anc Rages Pass If Sen MontagneelbinclusolPas encore d'évaluation
- 02 - Tourelle 02 - ALDES - VELONE 10.5 - 4T 1.5kWDocument3 pages02 - Tourelle 02 - ALDES - VELONE 10.5 - 4T 1.5kWghjkfPas encore d'évaluation
- Chapitre Iii Analyse Et Interpretation Des ResultatsDocument4 pagesChapitre Iii Analyse Et Interpretation Des Resultatshalima elbadaouyPas encore d'évaluation
- Chapitre 5Document68 pagesChapitre 5Billel KALACHEPas encore d'évaluation
- Pocket Guide Courroies PDFDocument124 pagesPocket Guide Courroies PDFFrancisPas encore d'évaluation
- 1 Analyse Fonctionnelle Median: Mode de MarchesDocument11 pages1 Analyse Fonctionnelle Median: Mode de MarchesToufik YemniPas encore d'évaluation
- Serie N°5 (2em Info) La Diode Et Le Transistor BipolaireDocument4 pagesSerie N°5 (2em Info) La Diode Et Le Transistor BipolaireRiadh MarouaniPas encore d'évaluation
- 14 Guide Technique PDFDocument24 pages14 Guide Technique PDFDahim OualiPas encore d'évaluation
- Rapport de Stage) 02Document12 pagesRapport de Stage) 02Mjadri BassemPas encore d'évaluation
- Rapport Mini ProjetDocument37 pagesRapport Mini Projetlaouali hamadou mahamadouPas encore d'évaluation
- Meth Calc PVDocument3 pagesMeth Calc PVAbdessadek HamdaouiPas encore d'évaluation
- QCM Puissance Et Energie Électrique 333Document8 pagesQCM Puissance Et Energie Électrique 333lina baccariPas encore d'évaluation
- SST 1552-2Document44 pagesSST 1552-2Fatiha ZelmatPas encore d'évaluation
- Cours de Turbomachine A Fluide CompressibleDocument90 pagesCours de Turbomachine A Fluide CompressibleHermas SEYIKPEPas encore d'évaluation
- Diagnostiquer Depanner Reparer AllumageDocument11 pagesDiagnostiquer Depanner Reparer AllumageATMANE ZIDOUHPas encore d'évaluation
- Machine Electrique II Sujet 2Document2 pagesMachine Electrique II Sujet 2Oncle LinkPas encore d'évaluation
- Verifier Et Entretenir Les Installations Techniques Dun ERPDocument5 pagesVerifier Et Entretenir Les Installations Techniques Dun ERPAldany Berancy Dorvela BitsindouPas encore d'évaluation
- 724 Bts Domo U4 2011Document64 pages724 Bts Domo U4 2011Ougribe OuijdanePas encore d'évaluation
- Phaseo ABL8BBU24200Document2 pagesPhaseo ABL8BBU24200Alexandre ThorelPas encore d'évaluation