Vous aimerez peut-être aussi
- Cours Modelisation Des AM (GOP)Document19 pagesCours Modelisation Des AM (GOP)Bassma Mrani100% (1)
- Tension Et Courant Alternatif Cours 1Document9 pagesTension Et Courant Alternatif Cours 1moudlimPas encore d'évaluation
- Cours de La Contruction Mã©canique 1Document106 pagesCours de La Contruction Mã©canique 1AdamAmmiPas encore d'évaluation
- Cours de RDM2 GCIDocument53 pagesCours de RDM2 GCICyrille prince Messi BITOMOLPas encore d'évaluation
- CAM - Rappel Sur Les Liaisons Mécaniques 1Document20 pagesCAM - Rappel Sur Les Liaisons Mécaniques 1Moslem ZariatPas encore d'évaluation
- Diapo Poulie CourroieDocument17 pagesDiapo Poulie CourroieAbi ClémentPas encore d'évaluation
- TP 32 ParaboleDocument7 pagesTP 32 ParaboleKesraoui HichemPas encore d'évaluation
- Cours Transistor CorrigeDocument2 pagesCours Transistor CorrigelifekingPas encore d'évaluation
- 3 - La Conversion Alternatif - Continu PDFDocument41 pages3 - La Conversion Alternatif - Continu PDFhamza0% (1)
- TorsionDocument8 pagesTorsionAchraf MoutaharPas encore d'évaluation
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Document2 pagesCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Bouraoui Ben AyedPas encore d'évaluation
- Ex c1 Pelle HydrauliqueDocument3 pagesEx c1 Pelle Hydrauliqueyounes100% (1)
- Chapitre 2 Resistance Elements MachineDocument4 pagesChapitre 2 Resistance Elements MachineImad BouhafsPas encore d'évaluation
- Chaine CinematiqueDocument8 pagesChaine CinematiqueBRAHAM Alaeddine100% (3)
- Technologie Et Maintenance Des Circuits FluidiquesDocument92 pagesTechnologie Et Maintenance Des Circuits FluidiquesMichael NyampaPas encore d'évaluation
- Partie4 PDFDocument33 pagesPartie4 PDFMoulod MouloudPas encore d'évaluation
- Variateur - Exercice PDFDocument2 pagesVariateur - Exercice PDFyassine safraouiPas encore d'évaluation
- Ge Esa 2018Document16 pagesGe Esa 2018othmane mrichPas encore d'évaluation
- Enroulement FilamentaireDocument6 pagesEnroulement Filamentaireالحمد لله100% (1)
- Liaison Hélicoidale ProfDocument12 pagesLiaison Hélicoidale ProftounsiPas encore d'évaluation
- Les Organes de GuidagesDocument4 pagesLes Organes de GuidagesHamza BNBPas encore d'évaluation
- Corrige de TPDocument3 pagesCorrige de TPfaridPas encore d'évaluation
- Bts Blanc 2elt Ese s1 2023bDocument14 pagesBts Blanc 2elt Ese s1 2023bAbi ClémentPas encore d'évaluation
- Série 3 2020-2021Document2 pagesSérie 3 2020-2021Siwar AbbesPas encore d'évaluation
- Matière CMIL Vs CMDocument2 pagesMatière CMIL Vs CMDjamel DjamPas encore d'évaluation
- Dossier Technique Sur Le Fonctionnement Du VariateurDocument6 pagesDossier Technique Sur Le Fonctionnement Du VariateurmllpoijPas encore d'évaluation
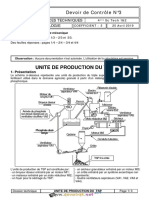
- Devoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenDocument7 pagesDevoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenYasmine SolenePas encore d'évaluation
- Liaison Pivot PDFDocument5 pagesLiaison Pivot PDFKouki NizarPas encore d'évaluation
- Fonction Distribuer - Eleve - CopieDocument6 pagesFonction Distribuer - Eleve - CopieHoussam HadPas encore d'évaluation
- Roule MentsDocument63 pagesRoule MentsYassine ElbiadPas encore d'évaluation
- Transmission de Puissance Avec Transformation de MouvementDocument19 pagesTransmission de Puissance Avec Transformation de MouvementPhil ČhrýstaĺPas encore d'évaluation
- 1.étude de La Chaîne CinématiqueDocument12 pages1.étude de La Chaîne Cinématiquegono playerPas encore d'évaluation
- STI Genie Electronique PhyApplDocument17 pagesSTI Genie Electronique PhyApplLetudiant.frPas encore d'évaluation
- Construction Liaison PivotDocument128 pagesConstruction Liaison PivotBen Slimen MohamedPas encore d'évaluation
- DS4 SujetDocument8 pagesDS4 SujetPierre BeckPas encore d'évaluation
- Loi Des Noeuds Loi Des Mailles - 1Document10 pagesLoi Des Noeuds Loi Des Mailles - 1Ima NePas encore d'évaluation
- TD N°2 Cinématique Du Solide Composition Des Vitesses Torseur CinématiqueDocument4 pagesTD N°2 Cinématique Du Solide Composition Des Vitesses Torseur CinématiquemzoughiPas encore d'évaluation
- Traction Et Compression Simple FiniDocument10 pagesTraction Et Compression Simple FiniToxic DEVPas encore d'évaluation
- Corrigé Afs2016Document6 pagesCorrigé Afs2016Ibrahim Êl BæzPas encore d'évaluation
- FDocument13 pagesFAziz AidaraPas encore d'évaluation
- TD Equipement Elect N 3Document2 pagesTD Equipement Elect N 3Oussama Chabbi100% (1)
- Devoir Libre (19-12-2018)Document4 pagesDevoir Libre (19-12-2018)Riham abPas encore d'évaluation
- Exercice 2 PoulieDocument1 pageExercice 2 Poulieben salem NaofelPas encore d'évaluation
- dm1 MathsDocument14 pagesdm1 Mathssamim1971Pas encore d'évaluation
- TP Scie SauteuseDocument5 pagesTP Scie SauteuseremivsnPas encore d'évaluation
- Machine AsychroneDocument63 pagesMachine AsychroneAriston DecorPas encore d'évaluation
- TD - Coupe Tube - Cor PDFDocument2 pagesTD - Coupe Tube - Cor PDFAdrien LupinPas encore d'évaluation
- CCS TSI 2022 VeloTDF SujetDocument18 pagesCCS TSI 2022 VeloTDF SujetKaled MRASSIPas encore d'évaluation
- Disjoncteur BT 2Document13 pagesDisjoncteur BT 2Moncef SkPas encore d'évaluation
- Chapitre Transistor Bip 16-17Document18 pagesChapitre Transistor Bip 16-17abdelkanPas encore d'évaluation
- Exercices de Révision Chapitres 1 Et 2 ETENP2Document7 pagesExercices de Révision Chapitres 1 Et 2 ETENP2Paul FagniardPas encore d'évaluation
- Correction Des ApplicationsDocument11 pagesCorrection Des ApplicationsYoussef Gharsallah100% (1)
- Régime Sinusoïdal 2018 - Partie 1 - ROGEDocument46 pagesRégime Sinusoïdal 2018 - Partie 1 - ROGEEsli AmbinintsoaPas encore d'évaluation
- Text MarkDocument72 pagesText MarkKaouari DalilaPas encore d'évaluation
- Formulaire Elec MecaDocument6 pagesFormulaire Elec MecaRyan Watts100% (3)
- Formulaire de Mécanique PDFDocument1 pageFormulaire de Mécanique PDFjbcharpePas encore d'évaluation
- SamediDocument13 pagesSamediBoris Cathérin Vidjannagni DOHOUPas encore d'évaluation
- Chapitre V Mouvement Des Solides en RotationDocument18 pagesChapitre V Mouvement Des Solides en Rotationradu70Pas encore d'évaluation
- Formulaire de Mecanique PDFDocument11 pagesFormulaire de Mecanique PDFsldwPas encore d'évaluation
- DsdsDocument11 pagesDsdsMuhammad YudhistiraPas encore d'évaluation
- REFERENCES BIBLIOGRAPHIQUES Du PolycopeDocument1 pageREFERENCES BIBLIOGRAPHIQUES Du PolycopeTriki BilelPas encore d'évaluation
- Cours AjustementsDocument6 pagesCours Ajustementsabder2222Pas encore d'évaluation
- 2 Encastrement Cours PDFDocument7 pages2 Encastrement Cours PDFdidinedPas encore d'évaluation
- Le Seisme Et Les Constructions en Metal Et en BoisDocument32 pagesLe Seisme Et Les Constructions en Metal Et en BoisNguyen Tran Tuan AnhPas encore d'évaluation
- Amenagement HydrauliqueDocument66 pagesAmenagement HydrauliqueTriki Bilel100% (1)
- 05-Fonctions 2Document9 pages05-Fonctions 2Triki BilelPas encore d'évaluation
- Sommaire de PolycopieDocument3 pagesSommaire de PolycopieTriki BilelPas encore d'évaluation
- Cotation Tolerancee-AjustemetDocument3 pagesCotation Tolerancee-AjustemetTriki BilelPas encore d'évaluation
- Page de Garde PolycopieDocument1 pagePage de Garde PolycopieTriki BilelPas encore d'évaluation
- 2 Devoir de Synthèse N°3 Math Bac Technique 2Document2 pages2 Devoir de Synthèse N°3 Math Bac Technique 2Triki BilelPas encore d'évaluation
- 3 Detendeurs 2016Document26 pages3 Detendeurs 2016Triki BilelPas encore d'évaluation
- 4M DS3Document4 pages4M DS3Triki BilelPas encore d'évaluation
- 4M005 Final W PDFDocument137 pages4M005 Final W PDFTriki BilelPas encore d'évaluation
- Étude Des FonctionsDocument20 pagesÉtude Des FonctionsYacine Boufeniche100% (1)
- Étude Des FonctionsDocument20 pagesÉtude Des FonctionsYacine Boufeniche100% (1)
- 2 Devoir de Synthèse N°3 Math Bac Technique 2 - 2Document2 pages2 Devoir de Synthèse N°3 Math Bac Technique 2 - 2Triki BilelPas encore d'évaluation
- 0018 Plaque Signaletique PDFDocument1 page0018 Plaque Signaletique PDFTriki BilelPas encore d'évaluation
- 3 Devoir de Synthèse N°3 Math Bac Technique 3Document4 pages3 Devoir de Synthèse N°3 Math Bac Technique 3Triki BilelPas encore d'évaluation
- 3 Devoir de Synthèse N°3 Math Bac Technique 3Document4 pages3 Devoir de Synthèse N°3 Math Bac Technique 3Triki BilelPas encore d'évaluation
- 04 Cours Continuite Derivabilite Fonction PDFDocument12 pages04 Cours Continuite Derivabilite Fonction PDFhammouda25100% (1)
- 04 Cours Continuite Derivabilite Fonction PDFDocument12 pages04 Cours Continuite Derivabilite Fonction PDFhammouda25100% (1)
- 15 Tubes Et Profils 50.000 PDFDocument18 pages15 Tubes Et Profils 50.000 PDFMohamed AbidatPas encore d'évaluation
- 1 TEC Devoir Corrigé de Synthèse N°3Document6 pages1 TEC Devoir Corrigé de Synthèse N°3Triki BilelPas encore d'évaluation
- 1 SaDocument8 pages1 SaStephane Durel MbidaPas encore d'évaluation
- 39 KM Pression Atmospheriqu PDFDocument2 pages39 KM Pression Atmospheriqu PDFTriki BilelPas encore d'évaluation
- 02 Cours Fctns FCTN Reference Variation FCTN AssocieesDocument14 pages02 Cours Fctns FCTN Reference Variation FCTN AssocieesTriki BilelPas encore d'évaluation
- 13 DistributeursDocument7 pages13 DistributeursAbdeltif BelquorchiPas encore d'évaluation
- 12 VerinsDocument10 pages12 VerinsSeVILLA8DzPas encore d'évaluation
- 14 Fonction Memoire PDFDocument5 pages14 Fonction Memoire PDFTriki BilelPas encore d'évaluation
- Le Fruit DéfenduDocument6 pagesLe Fruit DéfenduStradin Bien-aimePas encore d'évaluation
- Programme Français Niveaua1 - 1Document4 pagesProgramme Français Niveaua1 - 1bluegreeneyesPas encore d'évaluation
- Lauzanne L. Loubens G. Peces Del Río Mamoré (1985)Document113 pagesLauzanne L. Loubens G. Peces Del Río Mamoré (1985)Lila da Silva MoralesPas encore d'évaluation
- Ebook Petit Cours D Autodefense IntellectuelleDocument345 pagesEbook Petit Cours D Autodefense IntellectuelleZoula Khidri100% (5)
- Supports de CoursDocument62 pagesSupports de CoursSoufian Ouenzar100% (1)
- Preparation A L'envir ProfessDocument12 pagesPreparation A L'envir Professeya.jemaiPas encore d'évaluation
- tp15 MaiverDocument19 pagestp15 MaiverhenryPas encore d'évaluation
- Chapitre 2 Aftis Expo 3Document12 pagesChapitre 2 Aftis Expo 3Ayyoub DriouechPas encore d'évaluation
- Droit Des Contrats SpéciauxDocument18 pagesDroit Des Contrats SpéciauxTamih TamihPas encore d'évaluation
- Elle Est Bénie de DieuDocument1 pageElle Est Bénie de Dieudark musPas encore d'évaluation
- Viento Recio - Partitura CompletaDocument4 pagesViento Recio - Partitura CompletaAdonayPas encore d'évaluation
- 02 Excel Avancé PDFDocument29 pages02 Excel Avancé PDFans1390Pas encore d'évaluation
- Règlement D'application de L'accord Portant Révision de L'accord de Bangui 1977Document8 pagesRèglement D'application de L'accord Portant Révision de L'accord de Bangui 1977Adrien RainPas encore d'évaluation
- 3 Phase RectifierDocument72 pages3 Phase RectifierViet VietPas encore d'évaluation
- Les Médiétés - Paul-Henri MichelDocument41 pagesLes Médiétés - Paul-Henri MichelalfredoandradePas encore d'évaluation
- Denombrement PDFDocument5 pagesDenombrement PDFAhmed EnnajiPas encore d'évaluation
- (Elena Cassin) La Splendeur DivineDocument82 pages(Elena Cassin) La Splendeur DivineomarnsheaPas encore d'évaluation
- Bedel Olle Josiana RAPPORT DE STAGE 3ème3 (10) .OdtDocument13 pagesBedel Olle Josiana RAPPORT DE STAGE 3ème3 (10) .OdtjosianaPas encore d'évaluation
- Méthodologie Écrit BacDocument10 pagesMéthodologie Écrit Baclucienhardy73Pas encore d'évaluation
- ME Resume Conception Des Mecanismes Version 2022 2023 AV 10 01 2023 Période 3Document55 pagesME Resume Conception Des Mecanismes Version 2022 2023 AV 10 01 2023 Période 3ghali besriPas encore d'évaluation
- FREN 4101 B ExercicesDocument5 pagesFREN 4101 B ExercicesMa BeleuPas encore d'évaluation
- Swade Deadlandstheweirdwest ScntoutceqDocument2 pagesSwade Deadlandstheweirdwest ScntoutceqLaurentPas encore d'évaluation
- M26 - Moyens de Recherche D'emploi GE-ESA PDFDocument7 pagesM26 - Moyens de Recherche D'emploi GE-ESA PDFMohammed Amine KenedPas encore d'évaluation
- 10 Sujets Pour Lesquels Nous Devrions Prier Plus SouventDocument4 pages10 Sujets Pour Lesquels Nous Devrions Prier Plus SouventJacques ZinsePas encore d'évaluation
- Cours Initiation À L'architectureDocument271 pagesCours Initiation À L'architectureFoufa Archi100% (3)
- Marie-Madeleine by Sylvaine Landrivon (Landrivon, Sylvaine)Document126 pagesMarie-Madeleine by Sylvaine Landrivon (Landrivon, Sylvaine)Gabriela Negru100% (1)
- Cécile DemaudeDocument4 pagesCécile DemaudeliliphinexPas encore d'évaluation
- Guide Lire Ecrire CP 18 Version1juin18 PDFDocument5 pagesGuide Lire Ecrire CP 18 Version1juin18 PDFMustapha OUDIJAPas encore d'évaluation
- Cours Maintenance 2BENIM 1 PDFDocument99 pagesCours Maintenance 2BENIM 1 PDFhocine100% (1)
- Les Socles de Competences - Formation Mathematique (Ressource 1653) PDFDocument15 pagesLes Socles de Competences - Formation Mathematique (Ressource 1653) PDFdgsqfruerjtrsPas encore d'évaluation