Vous aimerez peut-être aussi
- Projet PalanDocument84 pagesProjet PalanYassire SamirPas encore d'évaluation
- Calcul Des Arbres Application Au Cas de L Arbre Tambour Du Treuil Oil Well 8Document61 pagesCalcul Des Arbres Application Au Cas de L Arbre Tambour Du Treuil Oil Well 8siPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Dimensionnement D'un Système de Chargement/déchargement Des CasiersDocument47 pagesDimensionnement D'un Système de Chargement/déchargement Des Casiersyoussef essasnoui100% (2)
- TD Palan Électrique À Chaine1Document2 pagesTD Palan Électrique À Chaine1Ncib_Mohsen_468383% (6)
- Mémoire ZEDDAM MOHAMED AYMANEDocument95 pagesMémoire ZEDDAM MOHAMED AYMANEZEDDAM100% (1)
- Etude Et Dimensionnement Du Système Hydraulique D'un Pont Élévateur A Deux ColonnesDocument3 pagesEtude Et Dimensionnement Du Système Hydraulique D'un Pont Élévateur A Deux ColonnesNzeko Nicaise100% (2)
- Analyse FonctionnelleDocument12 pagesAnalyse FonctionnelleAsmae AsseraouPas encore d'évaluation
- Etude Et Conception Pont ElevateurDocument74 pagesEtude Et Conception Pont ElevateurNdakadhthi Mendy Befiay100% (6)
- Etude de Conception D'une Roul - Mohamed TAIBI ALAOUI & Ahmed N - 5554Document50 pagesEtude de Conception D'une Roul - Mohamed TAIBI ALAOUI & Ahmed N - 5554gougam100% (3)
- Cours Vprocess PDFDocument47 pagesCours Vprocess PDFMohamed LaliouiPas encore d'évaluation
- PFE FinalDocument82 pagesPFE FinalfoufouaPas encore d'évaluation
- Pfe Machine Gravure VerinDocument82 pagesPfe Machine Gravure VerinHsyn Haj Mabrouk100% (3)
- RapportDocument47 pagesRapportoussamaPas encore d'évaluation
- Réducteurs de Vitesse À Engrenages PDFDocument44 pagesRéducteurs de Vitesse À Engrenages PDFerzrzretgertfertge91% (11)
- Rapport: Conception Et Dimensionnent D'une Éolienne TripaleDocument27 pagesRapport: Conception Et Dimensionnent D'une Éolienne TripaleHAMDAOUI Mohamed Amine81% (16)
- Conception D'une Machine de Po - Bouchra KHILOU - 4717Document42 pagesConception D'une Machine de Po - Bouchra KHILOU - 4717Adil EL AttarPas encore d'évaluation
- Catalogue Choix Vérins HydrauliquesDocument60 pagesCatalogue Choix Vérins HydrauliquesStephane Tchoriang100% (1)
- Rapport FinaleDocument50 pagesRapport FinaleFirass ChafaiPas encore d'évaluation
- Dimenstionnement de REDUCTEURDocument73 pagesDimenstionnement de REDUCTEURMichaël Paradjian100% (5)
- Cherif BorhenDocument127 pagesCherif BorhenFajjeri HadilPas encore d'évaluation
- Cours Elément Machine 2015 CH4-EngDocument36 pagesCours Elément Machine 2015 CH4-Engjaweher100% (6)
- DS3 3Document7 pagesDS3 3Sami BennourPas encore d'évaluation
- Ponts ÉlévateurDocument11 pagesPonts Élévateurchla100% (9)
- Étude Conception D'un Doseur de Solution de Saumure 2020Document101 pagesÉtude Conception D'un Doseur de Solution de Saumure 2020Aymen Gassara0% (2)
- Conception Et Dimensionnement D'une Rouleuse À Quatre RouleauxDocument180 pagesConception Et Dimensionnement D'une Rouleuse À Quatre Rouleauxwilfried100% (2)
- MINI PROJET ConceptionDocument40 pagesMINI PROJET Conceptionzehii ghofranPas encore d'évaluation
- Mini Projet de Table ElevatriceDocument35 pagesMini Projet de Table ElevatriceKawtar BenPas encore d'évaluation
- 02 Convoyeur CorrigeDocument6 pages02 Convoyeur CorrigeYnsip Smix100% (10)
- Recherche BibliographiqueDocument24 pagesRecherche BibliographiqueZEDDAMPas encore d'évaluation
- Projet Pont Roulant 2 5 T Appareils de Levage 3Document98 pagesProjet Pont Roulant 2 5 T Appareils de Levage 3Yassire Samir0% (1)
- Conception Par La Cao Des Parties Fixes D Une EolienneDocument82 pagesConception Par La Cao Des Parties Fixes D Une EolienneZantar Abdelhaq67% (3)
- PFE: Conception Et Réalisation Dun Malaxeur de Ciment-Sable Pour Laboratoire 5kg MaxDocument62 pagesPFE: Conception Et Réalisation Dun Malaxeur de Ciment-Sable Pour Laboratoire 5kg MaxYoussef El-mchichiPas encore d'évaluation
- Sujet de Projet Banc D'essai de FlexionDocument73 pagesSujet de Projet Banc D'essai de FlexionHajar Oumnas100% (3)
- Etude Et Conception D'une Mach - Mohammed MAAKOUL - 3939Document61 pagesEtude Et Conception D'une Mach - Mohammed MAAKOUL - 3939Sabrine Ben Hmida100% (1)
- Eolienne Bond GrapheDocument17 pagesEolienne Bond GrapheGH0% (2)
- Gamme D Usinage de La Piece 2Document3 pagesGamme D Usinage de La Piece 2Med Amine HattakiPas encore d'évaluation
- PDF CintreuseDocument67 pagesPDF CintreuseHichem Arfaoui100% (1)
- Dimensionnement Des Arbres PDFDocument42 pagesDimensionnement Des Arbres PDFounaies mohamed100% (1)
- Sujets Pfe MecaniqueDocument1 pageSujets Pfe Mecaniqueham50% (2)
- Présentation Soutenance Wafi MoufidDocument71 pagesPrésentation Soutenance Wafi MoufidMaroua LHPas encore d'évaluation
- Généralités Des Pont RoulantsDocument169 pagesGénéralités Des Pont RoulantsJeremie Ivann NGOYEPas encore d'évaluation
- Chapitre III Taillage Des EngrenagesDocument6 pagesChapitre III Taillage Des EngrenagesMehdi Hassine100% (1)
- Rapport Chariot ElevateurDocument53 pagesRapport Chariot ElevateurAymen Nasr100% (1)
- Train ÉpicycloidalDocument3 pagesTrain ÉpicycloidalAhmed Farahidi75% (4)
- Mini ProjetDocument14 pagesMini ProjetGhaith Soudani0% (1)
- Pont RoulantDocument6 pagesPont RoulantKhaled Ouni100% (2)
- Cintreuse Pour ToleDocument25 pagesCintreuse Pour Tolengouo100% (4)
- Dimensionnement de La Structure Mécanique D 'Un Pont RoulantDocument121 pagesDimensionnement de La Structure Mécanique D 'Un Pont RoulantElmehdi Elmessaoudi100% (2)
- Rapport de Stage GMODocument33 pagesRapport de Stage GMOKhàliiDo's Dik100% (1)
- 5-Calcul D'un Câble SouterrainDocument29 pages5-Calcul D'un Câble Souterraindandy0% (1)
- 1.MMC - Chapitres 1 Et 2Document51 pages1.MMC - Chapitres 1 Et 2kamal saqatPas encore d'évaluation
- 3-Cours Conception - Dimensionnement Et Fabrication Des Machines ÉlectriquesDocument76 pages3-Cours Conception - Dimensionnement Et Fabrication Des Machines ÉlectriquesnouhailaPas encore d'évaluation
- Cours de Transmission Mécanique 2015 (Enregistré Automatiquement)Document31 pagesCours de Transmission Mécanique 2015 (Enregistré Automatiquement)Boris Cathérin Vidjannagni DOHOUPas encore d'évaluation
- Security Training ManualDocument28 pagesSecurity Training ManualNoureddine KhelifiPas encore d'évaluation
- Les Microréacteurs Sont Des Réacteurs PlugDocument11 pagesLes Microréacteurs Sont Des Réacteurs Plugbelkacem kisriPas encore d'évaluation
- Projet Sur OnduleurDocument60 pagesProjet Sur Onduleurtanweer100% (1)
- Énergie Solaire : Guide Complet pour l'Installation de Panneaux Photovoltaïques sur Votre Maison à Pontault-CombaultD'EverandÉnergie Solaire : Guide Complet pour l'Installation de Panneaux Photovoltaïques sur Votre Maison à Pontault-CombaultPas encore d'évaluation
- Exo Soutien Decembre 2011Document6 pagesExo Soutien Decembre 2011Driss ZiedPas encore d'évaluation
- Forces AerodynamiquesDocument5 pagesForces AerodynamiquesFranco FrancoPas encore d'évaluation
- TD M7: Changement de Référentiel: Plan Prévisionnel Du ChapitreDocument6 pagesTD M7: Changement de Référentiel: Plan Prévisionnel Du ChapitreArbia CherietPas encore d'évaluation
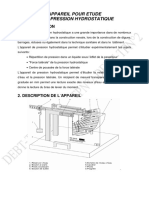
- TPN2 Pressionhydrostatique PDFDocument8 pagesTPN2 Pressionhydrostatique PDFmohPas encore d'évaluation
- Série TD (Compresseur Axial)Document6 pagesSérie TD (Compresseur Axial)NIAMPAPas encore d'évaluation
- SX021a - Panne Sur Deux Appuis en Profilé IPEDocument10 pagesSX021a - Panne Sur Deux Appuis en Profilé IPEWissem TaktakPas encore d'évaluation
- Exercices S FDocument3 pagesExercices S FihebkazPas encore d'évaluation
- Lubrification HydrodynamiqueDocument101 pagesLubrification HydrodynamiqueSmail Lebbal100% (1)
- Organigramme FlexionDocument2 pagesOrganigramme FlexionSiii Sili100% (1)
- Theme 15 Scie SauteuseDocument5 pagesTheme 15 Scie SauteuseCasa Maestro100% (1)
- Rdm8-Flambage 2Document9 pagesRdm8-Flambage 2Mohamed SahilPas encore d'évaluation
- F.bouny - Leçons de Mécanique Rationnelle - T2Document668 pagesF.bouny - Leçons de Mécanique Rationnelle - T2belgam2100% (2)
- Memoir Fin D'etude Mehdi BESSAIHDocument166 pagesMemoir Fin D'etude Mehdi BESSAIHBADRA NOUR BOUABDALLAHPas encore d'évaluation
- Expose Sur L Echangeur de ChaleurDocument19 pagesExpose Sur L Echangeur de ChaleurkhaledrevialPas encore d'évaluation
- Mini Manuel D'electrocinetiqueDocument240 pagesMini Manuel D'electrocinetiqueWissal Ben Slama80% (5)
- Équilibre D'un Clown Sur Un Ballon: Dans Tout Le Problème, Les Vecteurs Sont Notés en Caractères Gras. (R)Document3 pagesÉquilibre D'un Clown Sur Un Ballon: Dans Tout Le Problème, Les Vecteurs Sont Notés en Caractères Gras. (R)m0lcKy best playerPas encore d'évaluation
- Projet Sur La Torsion PDFDocument7 pagesProjet Sur La Torsion PDFMori NessrinePas encore d'évaluation
- Cours - Transferts Thermiques - SMP6 - AU2019-20Document54 pagesCours - Transferts Thermiques - SMP6 - AU2019-20ZahirPas encore d'évaluation
- NOTE DE CALCUL MGP Meknès PDFDocument106 pagesNOTE DE CALCUL MGP Meknès PDFMed KilaniPas encore d'évaluation
- Azote Liquide Pour Refrigeration PDFDocument7 pagesAzote Liquide Pour Refrigeration PDFAdonis Aristide KouadioPas encore d'évaluation
- Rapport Barrage en Bcr-Elkhatabi AbdelhadiDocument27 pagesRapport Barrage en Bcr-Elkhatabi AbdelhadiABDELHADI ELKHATABI100% (3)
- 2011CLF22143 BihinaDocument206 pages2011CLF22143 BihinaabdoulhabiPas encore d'évaluation
- Actions Mecaniques CorrectionDocument6 pagesActions Mecaniques CorrectionMayouMohAmed100% (1)
- Dyn FL CDocument32 pagesDyn FL CChourouk MeskiniPas encore d'évaluation
- Simulation D'un Ecoulement Diphasique Granulaire Par L'approche Euler LagrangeDocument90 pagesSimulation D'un Ecoulement Diphasique Granulaire Par L'approche Euler LagrangeBadre Ddine Jah-Gon PhénoménalePas encore d'évaluation
- Ecoulements ExternesDocument21 pagesEcoulements ExternesMouad MelloukiPas encore d'évaluation
- Étude Géotechnique 1Document5 pagesÉtude Géotechnique 1Yassin AmiriPas encore d'évaluation
- TRANSFERTS THERMIQUES-be8207Document10 pagesTRANSFERTS THERMIQUES-be8207Mouhamed Rassoul GueyePas encore d'évaluation
- TD Mecanique Des Fluides PC Ribiere PDFDocument56 pagesTD Mecanique Des Fluides PC Ribiere PDFdiopPas encore d'évaluation
- Mecanique 1BTSDocument30 pagesMecanique 1BTSKonan Wilfried100% (1)