Académique Documents
Professionnel Documents
Culture Documents
Cherif Borhen
Transféré par
Fajjeri HadilCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Cherif Borhen
Transféré par
Fajjeri HadilDroits d'auteur :
Formats disponibles
République Tunisienne
Université de Carthage
*** ***
Ministère de l’Enseignement Supérieur, Ecole Nationale d’Ingénieurs de Bizerte
de la Recherche Scientifique, des Technologies
de l’Information et de la Communication
N°M14-18
MEMOIRE
DE PROJET DE FIN D’ETUDES
Présenté à
L’Ecole Nationale d’Ingénieurs de Bizerte
Pour obtenir le
Diplôme National d’Ingénieur en Génie Mécanique
Réalisé par :
CHERIF BORHEN
Conception d’un bobinoir
Présenté et soutenu le 18 juin 2014, devant le jury d’examen
Mme Mona BEN ABDELKADER Président
M Lotfi SOUISSI Rapporteur
M Mohamed Mouldi BESAADI Encadreur
M Wajdi RAJHI Encadreur
Mlle Taysir REZGUI Encadreur
Année Universitaire : 2013 / 2014
Projet de fin d’études 2013/2014
Dédicaces
A mes très chers parents
Dont leurs mérites, leurs sacrifices, leurs qualités humaines m’ont
permis de vivre ce jour. Les mots me manquent pour exprimer toute la
reconnaissance, la fierté et le profond amour que je vous porte pour les
sacrifices qu’ils ont consenti pour ma réussite, qu’ils trouvent ici le
témoignage de mon attachement ma reconnaissance, gratitude et
respect, que dieu leur préservent bonne santé et longue vie. Tous mes
sentiments de reconnaissance pour vous.
A mes frères
J’espère atteint le seuil de vos espérances. Que ce travail soit
l’expression de ma profonde affection Je vous remercie pour le soutien
moral et l’encouragement que vous m’avez accordés .Je vous souhaite
tout le bonheur que vous méritez En leur souhaitant un brillant
avenir.
A ma famille et mes ami(e)s
Que je ne pourrais nommer de peur d’en oublier mon attachement et
mes affections les plus sincères
Conception d’un bobinoir Cherif Borhen
Projet de fin d’études 2013/2014
Remerciements
Avant de présenter mon rapport du projet de fin d’études, Je tiens à
remercier tous ceux qui, de près ou de loin, ont contribué à sa réalisation.
Ce travail est l’agrégat des résultats des trois années de formation à
l’ENIB en ce sens que c’est grâce aux connaissances acquises durant
toutes ces années de formation que j’ai pu réaliser ce travail.
Je tiens à remercier Mr. Lotfi SOUISSI pour l’honneur qui m’a fait
d’avoir accepté d’être rapporteur de ce projet.
Mes remerciements vont aussi à Mme Mona BEN ABDELKADER pour
avoir accepté de juger ce travail.
J’adresse mes remerciements les plus sincères à Mr. Wajdi Rajhi et Mlle
Taysir Rezgui pour leur encadrement, leur disponibilité et leur conseils
fructueux qu’il m’a prodiguées le long de mon projet.
J’adresse aussi mes remerciements à Mr. Mohamed Mouldi Bessadi, le
chef département Trèflerie dans la société « ELFOULADH » qui, malgré
ses multiples engagements, a accepté de se mettre à mon service en
dirigeant mes travaux.
Conception d’un bobinoir Cherif Borhen
Projet de fin d’études 2013/2014
Sommaire
INTRODUCTION GENERALE ................................................................................................ 1
Chapitre I : Présentation du cadre de projet ............................................................................... 2
I.1 Présentation de l’entreprise d’accueil................................................................................ 3
I.1.1 Activités D’ELFOULADH ......................................................................................... 3
I.1.2 Départements de production ....................................................................................... 3
I.2. Présentation de tréfilerie................................................................................................... 7
I.2.1. Patentage .................................................................................................................... 7
I.2.3. Cuivrage ..................................................................................................................... 7
I.2.4. Tréfilage..................................................................................................................... 8
I.2.5. Galvanisation ............................................................................................................. 8
I.2.6. Recuit ........................................................................................................................ 9
I.2.7. Rebobinage ................................................................................................................ 9
I.3. Ligne de rebobinage ......................................................................................................... 9
I.4. Problématique et cahier de charge.................................................................................. 12
I.4.1. Emplacement de la machine .................................................................................... 12
I.4.2. Géométrie de Bobine ............................................................................................... 13
I.4.3. Données de fonctionnement .................................................................................... 13
I.4.4. Cahier des charges fonctionnel (CDCF) ................................................................. 14
Chapitre II : Analyse des mécanismes de la machine existante dans l’entreprise ................ 15
II.1. Spécifications fonctionnelles de la machine ............................................................... 16
II.2. Spécifications technologiques ....................................................................................... 17
II.3. Description du dérouleur............................................................................................... 18
II.4. Analyse fonctionnelle du besoin ................................................................................... 19
II.4.1. Organigramme A-0................................................................................................. 21
II.5. Analyse fonctionnelle technique ................................................................................... 26
Chapitre III : Calcul et dimensionnement ................................................................................ 32
III.1. Conception des différentes parties de machine ........................................................... 33
III.1.1. Démarche de conception ....................................................................................... 33
III.1.2 Structure du bobinoir ............................................................................................. 33
III.1.3 Contre pointe motrice............................................................................................. 35
Conception d’un bobinoir Cherif Borhen
Projet de fin d’études 2013/2014
III.1.3.1. Arbre Moteur .................................................................................................. 36
III.1.4 Contre pointe coulissante ....................................................................................... 37
III.1.5. Système de trancanage .......................................................................................... 38
III.2. Calcul et dimensionnement.......................................................................................... 38
III.2.1. Dimensionnement Moteur..................................................................................... 39
III.2.2. Calcul du couple moteur ....................................................................................... 39
III.2.3. Choix de réducteur et moteur ................................................................................ 40
III.2.4. Conception préliminaire de l’axe de transmission ................................................ 41
III.2.5. Calcul d’arbre moteur ........................................................................................... 47
III.2.5.1 Détermination de coefficient de sécurité ......................................................... 47
III.2.5.2 Vérification de diamètre de l’arbre ................................................................. 53
III.2.6. Calcul de roulements............................................................................................. 53
III.2.6.1. Validation sous sollicitation dynamique ........................................................ 55
III.3. Conception du système de trancanage ......................................................................... 56
III.3.1. Motorisation individuelle du système de trancanage ............................................ 56
III.3.1.1. Calcul de Jv .................................................................................................... 57
III.3.1.2. Condition de fonctionnement nominale ......................................................... 58
III.3.1.3. Encombrement................................................................................................ 59
III.3.2.1. Calcul de courroie .......................................................................................... 60
III.4. Dimensionnement des vérins ....................................................................................... 64
III.4.1. Calcul .................................................................................................................... 65
III.4.1.1. Calcul Vérin 1 et 3......................................................................................... 65
III.4.1.2. Calcul vérin 2 ................................................................................................. 67
Chapitre IV Analyse des contraintes appliquées sur la bobine ................................................ 70
IV.1. Vérification de résistance au chargement .................................................................... 71
IV.1.2. Méthode d’éléments finis...................................................................................... 71
IV.1.2.3. Etapes logiques du calcul par éléments finis : [11] ........................................ 72
IV.1.2.4. Etapes pratiques du calcul par éléments finis ................................................ 72
IV.1.3. Etude de la bobine sous Abaqus ........................................................................... 73
IV.1.3.1. Le préprocessing ............................................................................................ 73
Conception d’un bobinoir Cherif Borhen
Projet de fin d’études 2013/2014
IV.1.3.2. Le Postprocessing .......................................................................................... 76
IV.2. Vérification au flambage ............................................................................................. 78
IV.2.1. Calcul au flambement ........................................................................................... 79
Chapitre V : Maintenance et sécurité ....................................................................................... 81
V.1. Sécurité de la machine et de l’opérateur ....................................................................... 82
V.1.1. Sécurité de la machine .......................................................................................... 82
V.1.2. Sécurité de l’opérateur .......................................................................................... 83
V.2. Vérification chaine de cote ........................................................................................... 85
V.3. Maintenance du bobinoir .............................................................................................. 86
Conclusion ............................................................................................................................ 88
Conclusion ................................................................................................................................ 89
Références Bibliographiques.................................................................................................... 90
ANNEXES ............................................................................................................................... 91
Conception d’un bobinoir Cherif Borhen
Projet de fin d’études 2013/2014
Liste des figures
Figure 1 : Fabrication de l’acier en biellette .............................................................................. 4
Figure 2 : Fil galvanisé recuit fabriqué dans le département tréfilerie ....................................... 6
Figure 3 : Dérouleur ................................................................................................................. 10
Figure 4 : Enrouleur ................................................................................................................. 11
Figure 5 : Compensateur .......................................................................................................... 11
Figure 6 : Rebobineuse ............................................................................................................. 12
Figure 7 : Géométrie de la bobine ............................................................................................ 13
Figure 8 : Structure formelle de la machine ............................................................................. 18
Figure 9 : Diagramme bête à cornes......................................................................................... 20
Figure 10 : Organigramme A-0 ................................................................................................ 21
Figure 11 : Cycle de vie de la machine .................................................................................... 22
Figure 12 : Diagramme pieuvre du bobinoir ............................................................................ 23
Figure 13 : Décomposition de la fonction principale ............................................................... 26
Figure 14 : Solutions techniques possibles de FP1 .................................................................. 27
Figure 15 : Solutions techniques possibles de FP2 .................................................................. 27
Figure 16 : Solutions techniques possibles de FP3 .................................................................. 28
Figure 17 : Décomposition de la première fonction contrainte ................................................ 28
Figure 18 : Décomposition de FC3 .......................................................................................... 29
Figure 19 : Décomposition de FC4 .......................................................................................... 29
Figure 20 : Décomposition de FC5 .......................................................................................... 30
Figure 21 : Décomposition de FC7 .......................................................................................... 30
Figure 22 : Décomposition de FC8 .......................................................................................... 31
Figure 23 : Les différents composants du bobinoir .................................................................. 34
Figure 24 : Structure générale du bobinoir............................................................................... 34
Conception d’un bobinoir Cherif Borhen
Projet de fin d’études 2013/2014
Figure 25 : Vue 3D du bobinoir ............................................................................................... 35
Figure 26 : Contre pointe motrice ............................................................................................ 36
Figure 27 : Modèle de l’arbre du contre pointe motrice........................................................... 37
Figure 28 : Modèle de la contre pointe coulissante .................................................................. 38
Figure 29 : Pièces en rotation autour de l’axe du moteur (Axe X) .......................................... 40
Figure 30 : Schéma cinématique de l'arbre de transmission .................................................... 41
Figure 31 : Diagramme des efforts tranchants ......................................................................... 46
Figure 32 : Diagramme des moments fléchissant .................................................................... 46
Figure 33 : Diagramme des moments de torsion ...................................................................... 47
Figure 34 : Facteur de service Ks en fonction de la rugosité et Rm......................................... 50
Figure 35 : Coefficient Ke en fonction du diamètre de l’arbre ................................................ 50
Figure 36 : Géométrie de l’arbre moteur .................................................................................. 51
Figure 37 : Abaques Kt en fonction du rapport d/D et r/t ........................................................ 52
Figure 38 : Rapport Kf/Kt en fonction du Rm ......................................................................... 52
Figure 39 : Modélisation du système de trancannage .............................................................. 57
Figure 40 : Modélisation du système de trancannage .............................................................. 60
Figure 41 : Disposition du mécanisme ..................................................................................... 61
Figure 42 : Placements des vérins ............................................................................................ 64
Figure 43 : Tige du vérin flambant........................................................................................... 66
Figure 44 : Traçage du point I .................................................................................................. 67
Figure 45 : Traçage du point I .................................................................................................. 68
Figure 46 : Nœuds du maillage d’une bille .............................................................................. 71
Figure 47 : Géométrie importé de la bobine ............................................................................ 73
Figure 48 : Géométrie crée de fil acier ..................................................................................... 74
Figure 49 : Bobine et fil assemblés .......................................................................................... 75
Figure 50 : Chargement de la bobine ....................................................................................... 75
Figure 51 : Bobine maillée ....................................................................................................... 76
Conception d’un bobinoir Cherif Borhen
Projet de fin d’études 2013/2014
Figure 52 : Géométrie du fil maillée ........................................................................................ 76
Figure 53 : Vérification du critère de Von Mises ..................................................................... 77
Figure 54 : Déplacement résultant............................................................................................ 77
Figure 55 : Modèle de poutre en compression sur deux appuis ............................................... 78
Figure 56 : Détermination du diamètre nominale .................................................................... 82
Figure 57 : Dimensions de sécurité de la norme ISO 12100-1 ................................................ 84
Figure 58 : Détermination de la distance du protecteur par rapport à la machine ................... 84
Conception d’un bobinoir Cherif Borhen
Projet de fin d’études 2013/2014
Liste des tableaux
Tableau 1 : Produit finis du Département Exploitation Aciérie ................................................. 5
Tableau 2 : Inventaire des contraintes ...................................................................................... 17
Tableau 3 : Niveau de flexibilité .............................................................................................. 24
Tableau 4 : Caractérisation des fonctions de services .............................................................. 25
Tableau 5 : Détermination de couple moteur ........................................................................... 40
Tableau 6 : Caractéristiques de moteur choisi ......................................................................... 41
Tableau 7 : Réaction d’appuis et données dimensionnelles du système .................................. 43
Tableau 8 : Détermination des efforts de cohésion .................................................................. 44
Tableau 9 : Coefficient Kp selon le mode de sollicitation ....................................................... 49
Tableau 10 : Caractéristiques de la vis ..................................................................................... 58
Tableau 11 : Caractéristiques de moteur choisi ....................................................................... 59
Tableau 12 : Caractéristiques des vérins .................................................................................. 65
Tableau 13 : Caractéristiques du frein choisi ........................................................................... 83
Tableau 14 : Opérations d’entretien pour chaque pièce ........................................................... 86
Conception d’un bobinoir Cherif Borhen
Projet de fin d’études 2013/2014
INTRODUCTION GENERALE
Le développement économique mondial actuel a créé un environnement très dynamique,
où les technologies dans tous les domaines sont devenues de plus en plus avancées, par
rapport à quelques années seulement auparavant. Devant ce fait, et ayant à faire face aussi à
une clientèle qui devient de plus en plus exigeante, les industriels ne cessent de veiller à
pousser leur productivité tout en gardant un haut niveau de qualité.
Pour rester compétitives, les entreprises doivent assurer un processus de progrès
permanent en améliorant continuellement la qualité et la fiabilité de leurs produits et leurs
équipements. Elles doivent toujours innover et concevoir de nouveaux produits et développer
des nouvelles méthodes d’essais afin de satisfaire le besoin du client.
Dans le cadre du projet de fin d’études en génie Mécanique à l’Ecole Nationale
d’Ingénieurs de Bizerte, l’entreprise « EL FOULADH » m’a chargé de concevoir un bobinoir
qui set à enrouler le fil d’acier dur le long de la bobine. Le nouveau bobinoir à axe horizontal
est disposé dans une nouvelle ligne de tréfilage.
Afin de répondre à cette problématique, la premier chapitre sera consacrer à la
présentation de l’entreprise d’accueil plus précisément le département Trèflerie et la ligne
existante de rebobinage. Le chapitre suivant détaillera la composition du bobinoir existant et
une description du nouveau bobinoir en répondant aux besoins décrits par une analyse
fonctionnelle descriptive. Le troisième chapitre développera la conception mécanique
détaillée de la machine et l’étude du comportement de la bobine aux différents chargements
Possibles.
Le dernier chapitre présentera le choix des dispositifs de sécurité pour la machine et
l’opérateur, ainsi que les opérations de maintenance nécessaires.
Conception d’un bobinoir 1 Cherif Borhen
Projet de fin d’études 2013/2014
Chapitre I : Présentation du cadre de projet
Conception d’un bobinoir 2 Cherif Borhen
Projet de fin d’études 2013/2014
Nous évoquons dans ce premier chapitre le cadre générale du projet, l’entreprise
d’accueil «El Fouladh » et plus particulièrement le département tréfilerie. Ensuite, nous
allons décrire la ligne de rebobinage existante dans la société et on finira par spécifier la
problématique et le cahier de charge.
I.1 Présentation de l’entreprise d’accueil
La société Tunisienne de sidérurgie EL FOULADH, une société à caractère industriel et
commercial soumise à la tutelle du ministère de l’industrie, a été créée en 1962 et sa
production a démarré en 1965.
L’état tunisien détient plus de 90 de son capital, le reliquat étant détenu par des
organismes bancaires et privés. Son chiffre d’affaire s’élève à près de 170 million de Dinars.
EL FOULADH emploie environ 1200 personnes dans son usine implantée à Menzel-
Bourguiba au nord de la Tunisie ou se trouve également son siège social.
I.1.1 Activités D’ELFOULADH
La mission initiale d’EL FOULADH était de valoriser le minerai de tunisien, de satisfaire
le marché local en rond à béton et de créer de l’emploi.
Actuellement, compte tenu des changements qui s’opèrent dans son environnement
socioéconomique, EL FOULADH vise à satisfaire sa clientèle en quantité et qualité.
ELFouladh offre des activités diverses pour sa clientèle : les
- Activités sidérurgiques (Acier en billettes, et produits laminés oings).
- Activités tréfilerie (divers produits tréfiles).
- Activité structures métalliques galvanisées à chaud (pylônes, charpentes, et
galvanisation à façon).
I.1.2 Départements de production
La société comporte quatre départements séparés : le :
- Département Exploitation Aciérie (DEA), le :
- Département d’Exploitation Laminoirs (DEL), le :
Conception d’un bobinoir 3 Cherif Borhen
Projet de fin d’études 2013/2014
- Département d’Exploitation Tréfilerie (DETF), et le :
- Département d’Exploitation des Structures Métalliques (DESM).
Ces départements de production sont soutenus par d’autre entités supports assurant les
fonction telles que : Etudes et Développement, Achats, Ventes et Marketing, Maintenance,
Mouvement, Contrôle Qualité, Financier, Comptabilité, Formation, Administratif , Juridique,
contrôle de gestion, Informatique, Magasins, Utilité.
I.1.2.1. Département exploitation aciérie (DEA)
Ce département produit les billets. Ce sont des barres d’acier de section carrée (110mm x
110mm) de longueur 3m et d’un poids variant entre 300kg et 350kg.
La billette sert par la suite pour la production des barres ou des fils métalliques.
L’aciérie électrique produit 90 000 tonnes de billettes / ans, l’approvisionnement de
l’aciérie en ferrailles est assuré par un service ferraille doté de moyens appropriés.
Les billettes fabriquées par l’aciérie sont vendues au Département d’Exploitation
Laminoirs.
Figure 1 : Fabrication de l’acier en biellette
Ce département comporte plusieurs équipements :
- un mélangeur de capacité 400 tonnes.
- 2 convertisseurs (CD) de capacité 20 tonnes pour chacun.
- 3 machines à couler continue à 2 lignes.
- un four électrique de 20 tonnes.
Conception d’un bobinoir 4 Cherif Borhen
Projet de fin d’études 2013/2014
- un four à poche de 20 tonnes.
I.1.2.1.1. Appareils d’élaboration
Le processus de fabrication des billets passe les appareils suivants :
- Trois machines de coulée continue à deux lignes chacune. Ces machines
transforment l’acier liquide en billettes (lingots) de section carrée (118 x 118) et
de longueur 3.4 m l’une des trois machines a été acquise en 1977 en même temps
que le four ares.
- Un four à chaux.
- Une centrale à oxygène.
- Une fumisterie (atelier de maçonnage des poches acier et des tondisse ou
répartiteurs de jet).
- Un service de maintenance électromécanique.
- Un atelier de préparation des poches (système à tiroir, système d’insufflation…).
- Des ponts roulants, des engins et d’autres équipements de transport, manutention
et levage.
I.1.2.2. Département exploitation laminoir (DEL)
Ce département fabrique des produit laminées longs à partir des billettes ou emportées,
par laminage à chaud. (Tableau 1). La capacité de production de ce département est définit en
fonction des appareils utilisés. En effet, le train à barres (installé en 1965) produit 140 000
tonnes/ an et le train à fils (installé en 1974) produit 85 000 tonnes/ an.
Tableau 1 : Produit finis du Département Exploitation Aciérie
Train à barres Train à fils
Diamètre 10.12.14.16.20mm
Diamètre 6.8 et 10 crénelé ou lisse en
Crénelé lisse en barres
couennes
Diamètre 25 crénelé ou lisse en barres Fini ou à dresser en barres
Carré 10,12 et 14 en barres Fini on à dresser en barres
Ce département se compose de plusieurs appareils :
Conception d’un bobinoir 5 Cherif Borhen
Projet de fin d’études 2013/2014
- Un train à barres (démarrage en 1965).
- Un train à fils (démarrage en 1974).
- Des machines à dresser.
- Un atelier des cylindres (usinage).
- Un service maintenance.
- Un pare de stockage des billettes.
- Deux fours poussant.
- Equipement axillaire.
I.1.2.3. Département exploitation tréfilerie (DETF)
Ce département fabrique des produits tréfilés. Il a démarré en 1971 avec une capacité de
12000 tonnes par an. Sa capacité atteint aujourd’hui environ 25000 tonnes/an.
Plusieurs produits sont fabriqués dans le département tréfilerie et qui sont exploités dans
plusieurs domaines.
Figure 2 : Fil galvanisé recuit fabriqué dans le département tréfilerie
I.1.2.4. Département exploitation de structure métallique (DESM)
Ce département a été créé en 1971 pour répondre aux besoins des industriels, agriculteurs
et commerçants en bâtiment, Tagar, pylônes, et autres structures spécifiques.
Les activités principales de ce département sont
o la fabrication des pylônes et charpentes métalliques galvanisées à chaud
Conception d’un bobinoir 6 Cherif Borhen
Projet de fin d’études 2013/2014
o la galvanisation
o le montage des charpentes.
I.2. Présentation de tréfilerie
La tréfilerie contient le patentage, décapage, recuit, galvanisation, normalisation et
bobinage avec tous les conditionnements des fils exigés par les normes internationales.
I.2.1. Patentage
Le patentage est une installation de traitement thermique et isotherme qui consiste à
changer la structure de l’acier au carbone (acier dure) en fil très filable.
Cette étape est réalisée par les équipements suivants :
- Une section d’évitage.
- Un four de traitement thermique qui est divisé en trois zones de chauffage.
- Un bain de plombe pour refroidissements du fils à la sortie du four.
- Un enrouleur de fils après patentage.
I.2. 2. Décapage
C’est une opération qui consiste à enlever de la calamine qui se trouve sur les fils.
Cette étape est réalisée à l’aide des bains successifs qui sont :
- Trois bains d’acide chlorhydrique ont pour but d’enlever la calamine, l’oxyde de
fer et rendre le fil propre.
- Un bain d’eau de rinçage permet d’enlever le chlorure de fer.
- Un bain d’eau chaude permet de neutraliser les traces d’acides.
- Un bain de phosphatation consiste à faire une couche de phosphate au fil.
- Un bain de borax pour recouvre le fil d’une mince couche de lubrifiant.
- Une étuve permet de sécher les fils à une température de 300˚C.
I.2.3. Cuivrage
Le cuivrage est un revêtement de surface par le cuivre à fin d’empêcher la corrosion des
fils.
Conception d’un bobinoir 7 Cherif Borhen
Projet de fin d’études 2013/2014
Le cuivrage passe par des étapes successives :
- Décaper le fil d’acier avec de l’acide sulfurique.
- Plonger le fil d’acier dans le bain de cuivrage contenant une solution de sulfate de
cuivre.
- Rincer le fil dans le bain d’eau pour éliminer les effets de l’acide.
- Passer le fil dans un bain de tréfilage pour le lubrifier.
- Bobiner le fil.
I.2.4. Tréfilage
Le tréfilage est une opération qui consiste à diminuer le diamètre du fil d’acier par
l’étirage à froid. La réduction du diamètre est effectuée lorsque le fil d’acier passe par des
filières qui diminuent son dimension pour obtenir à la fin le diamètre désiré (exemple : un fil
de diamètre 6 mm il doit passer par dix filière pour avoir à la fin un diamètre de 2mm).
L’atelier ce compose de 16 machines à tréfiler allant de 10mm jusqu’à 0,7mm.
I.2.5. Galvanisation
La galvanisation est un revêtement de surface par le zinc dont le but est d’éviter la
corrosion.
L’atelier galvanisation regroupe plusieurs machines tel que :
- Un train dévidoir de 22lignes.
- Un four de recuit : température 750˚C.
- Un bain d’eau pour refroidissement après le recuit.
- Un bain d’acide chlorhydrique pour le décapage.
- Un bain d’eau de rinçage (enlever l’acide).
- Un bain de flux.
- Un séchoir (pour sécher les fils).
- Un bain de zinc (pour faire une couche de zinc au fils).
- Un bain d’eau pour le refroidissement.
- Enfin le bobinage (le fil passe par les différents enroulements pour se bobiner).
Conception d’un bobinoir 8 Cherif Borhen
Projet de fin d’études 2013/2014
I.2.6. Recuit
Le recuit a pour but d’améliorer les caractéristiques du fil est surtout de diminuer
la résistance à la rupture du métal.
Les étapes de recuit se résument ainsi :
- Disposer les couronnes sur les paniers.
- Mettre les paniers sur l’embase.
- Fermer avec la cloche.
- Alimenter l’ensemble durant une heure par l’azote pour le neutraliser.
- Mettre l’ensemble à une température bien déterminé pendant 4 ou 5 heures.
- Sortir l’ensemble du four pour un refroidissement.
- Homogénéisation de la température est effectuée à l’aide d’un ventilateur.
Un four de recuit est constitué essentiellement d’une cloche et d’une embase. Dans
l’atelier il existe deux fours de recuit :
Un four dont la cloche est fixe est constitué de briques réfractaires permettant une
isolation thermique.
Un four à commande numérique avec le même principe de fonctionnement mais sa
cloche est constituée de fibre de céramique.
I.2.7. Rebobinage
Le fil à bobiner vient du recuit en couronnes et passe par une dresseuse à fin d’obtenir un
bon bobinage. Le diamètre de fil à bobiner est de 1,80mm et la bobine du fil enroulé est de
2000mm et 50 kg.
I.3. Ligne de rebobinage
La rebobineuse est une ligne complète pour l’enroulement de fil, en acier au carbone et
inox, sous forme de bobines. Elle permet donc de dérouler automatiquement le fil de bobines
avec gros diamètre pour le rebobiner sur bobines de diamètre plus faible. Ces dernières sont
en plastique ou en métal et l’enroulement obtenu est à spires jointives ou random (spires
libres).
Conception d’un bobinoir 9 Cherif Borhen
Projet de fin d’études 2013/2014
Cette machine doit donc assurer :
L’enroulement de fil en spire jointives afin d’améliorer la qualité du produit.
le déroulement de fil mal-enroulé en utilisant le fonctionnement marche arrière pour
éviter le gaspillage des bobines d’où l’augmentation de la production.
D’où la structuration suivante:
un dérouleur : système semi-automatique qui sert à dérouler le fil à partir de grandes
bobines métalliques.
Figure 3 : Dérouleur
un enrouleur : système semi-automatique qui permet l’enroulement de fil en spires
jointives ou random sur des bobines petites en plastique.
Conception d’un bobinoir 10 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 4 : Enrouleur
un compensateur : sert à compenser la tension exercée sur le fil entre l’enrouleur et le
dérouleur et empêcher ainsi la rupture de fil. La tension sur le fil est due à l’écart entre
les vitesses de déroulement et d’enroulement.
Figure 5 : Compensateur
Conception d’un bobinoir 11 Cherif Borhen
Projet de fin d’études 2013/2014
Ces trois parties de la machine apparaissent sur la photo de la rebobineuse semi-
automatique présentée sur la figure 6.
Figure 6 : Rebobineuse
I.4. Problématique et cahier de charge
La conception du nouveau bobinoir requière un emplacement et une géométrie de bobine
bien déterminée.
I.4.1. Emplacement de la machine
Ce nouveau bobinoir multiple à axe horizontal est prédisposé pour recueillir le fil
provenant d’une machine à tréfiler rectiligne. Le bobinoir est conçu pour enrouler le fil acier
dur sur une bobine déjà fabriqué avec une vitesse d’enroulement constant et avec
synchronisation avec tréfileuse. Après bobinage la bobine est libérée et sortie de la machine.
(Annexe 1).
Conception d’un bobinoir 12 Cherif Borhen
Projet de fin d’études 2013/2014
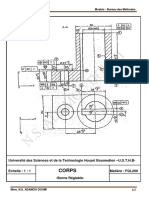
I.4.2. Géométrie de Bobine
Ce nouveau bobinoir fonctionne avec une bobine de diamètre 800mm .La bobine est de
forme cylindrique fabriqué en acier et elle pèse 600 kg. (Annexe 2).
Les dimensions de bobine sont représentées dans la figure 7.
Figure 7 : Géométrie de la bobine
I.4.3. Données de fonctionnement
Les données nécessaires pour le fonctionnement du bobinoir tel que son poids en cours
d’enroulement de fil d’acier, son vitesse, le rapport de réduction sont fournis à l’Annexe 3.
Conception d’un bobinoir 13 Cherif Borhen
Projet de fin d’études 2013/2014
I.4.4. Cahier des charges fonctionnel (CDCF)
L’objectif étant l’étude et conception d’un Bobinoir, il est nécessaire de concevoir un
système ayant une géométrie, un poids et une vitesse de fonctionnement bien définis par
l’entreprise et satisfaisant des exigences techniques (Fiabilité, flexibilité des réglages et
protection de l’opérateur) et des exigences fonctionnelles. Il faut que le système :
o Utilise des composants standards.
o Résiste aux agressions du milieu de travail.
o Facilite l’accès à l’intervention pour la maintenance.
o Garantie la disponibilité des pièces de rechange.
o Dispose de l’outillage adéquat.
o Permet à l’intervenant d’effectuer des tâches de maintenance en toute sécurité.
Ainsi, nous cherchons à déterminer :
o Une Modélisation 3D du bobinoir.
o Les dessins de définition de chaque composant de la machine.
Conclusion
Dans ce chapitre, nous avons présenté une idée sur les activités de la société ainsi sur les
départements de production et la ligne de rebobinage existante. Nous avons fini par présenter
la problématique et le cahier de charge. Dans ce qui suit, nous effectuerons une analyse du
mécanisme de la machine existante.
Conception d’un bobinoir 14 Cherif Borhen
Projet de fin d’études 2013/2014
Chapitre II : Analyse des mécanismes de la machine
existante dans l’entreprise
Conception d’un bobinoir 15 Cherif Borhen
Projet de fin d’études 2013/2014
Nous se proposons, dans cette partie, de décrire les différentes parties de la machine
existante. Ensuite nous allons décrire le fonctionnement de l’enrouleur et nous finirons ce
chapitre par situer la machine dans son environnement à l’aide d’une analyse fonctionnelle
descriptive.
II.1. Spécifications fonctionnelles de la machine
Rebobiner le fil en spires jointives constitue la fonction globale du système, pour cela :
Le fil tréfilé ou stocké sur la bobine de gros diamètre est déroulé, redressé, puis
enroulé sur des petites bobines en plastique. L’enroulement du fil suit une démarche
rigoureuse de distribution guidée qui permet d’obtenir des spires jointives.
Il est nécessaire de synchroniser ces deux tâches complémentaires sinon le fil risque de
se couper chaque fois qu’il y a un problème de dysfonctionnement, ce problème est
alors résolu en amortissant la pression mécanique (tension) sur le fil.
Cette description de niveau très global peut être affinée comme suit :
a. tâche « dérouler le fil » peut se décomposer en tâches composantes.
Positionner la bobine sur le plancher de levage.
Fixer la bobine.
Abaisser le plancher de levage.
Fermer la protection.
Enfiler la machine en faisant attention à faire passer le fil dans la poulie de marche
arrière.
b. tâche « enrouler le fil » est décomposée en :
Fixer la bobine.
Redresser le fil.
Enrouler le fil.
Repartir le fil en spires jointives.
En réalité les fonctions enrouler et repartir le fil se déroulent en parallèle, ce parallélisme
des tâches est nécessaire pour l’obtention des spires jointives.
Conception d’un bobinoir 16 Cherif Borhen
Projet de fin d’études 2013/2014
II.2. Spécifications technologiques
Chaque fonction principale de la machine se compose des fonctions secondaires qui
sont liés à des contraintes imposées.
Tableau 2 : Inventaire des contraintes
Fonction
Fonctions composantes Contraintes imposées
principale
- positionner la bobine
- Dimension de la grande bobine
- fixer la bobine
- Vitesse de fermeture réglable
dérouler - abaisser le plancher de levage
- Vitesse de déroulement réglable
- fermer la protection
- enfiler la machine
- fixer la bobine - Vitesse de fixation de la bobine
- fermer la protection réglable
enrouler - redresser le fil - vitesse d’enroulement réglable
- enrouler le fil - course de répartition prédéfinit
- repartir le fil en spires jointives - comptage de matière à enrouler
- amortir la tension de fil par
pression - Pression réglable (max-min)
compenser
- synchroniser les vitesses
d’enroulement et de déroulement
o Le fonctionnement correct de la machine exige l’exécution simultanée de ces
opérations
trancannage collectivement à l’enroulement.
distribution collectivement au tréfilage (en marche arrière).
déroulement parallèlement à l’enroulement.
Conception d’un bobinoir 17 Cherif Borhen
Projet de fin d’études 2013/2014
D’où, l’organisation générale du système présentée sur la figure 8.
Dérouleur Compensateur Enrouleur
Figure 8 : Structure formelle de la machine
II.3. Description du dérouleur
Le dérouleur de la machine est adapté pour travailler avec bobines de différentes
dimensions, il est équipé :
o d’un moteur à courant continu avec dynamo tachymétrique protégé par fusées
ultrarapides, muni d’actionnement triphasé bidirectionnel permettant de faire la
rotation de la bobine en marche avant et inversement (en inversant la tension sur les
balais du moteur).
o Mandrin fixe liée au moteur qui assure la rotation de la bobine à l’aide d’une
transmission poulie courroie et un disque plateau qui entraine la bobine en rotation par
un pivot d’entrainement.
o un mandrin mobile qui sert à centrer la bobine en cours de bobinage à l’aide d’un cône
porte bobine encastrée sur un arbre coulissant.
Conception d’un bobinoir 18 Cherif Borhen
Projet de fin d’études 2013/2014
II.4. Analyse fonctionnelle du besoin
Tout nouveau produit doit passer par certaines étapes d’analyses, pour qu’il se transforme
d’un simple besoin exprimé par le client à un produit fini qui répond à certaines exigences.
Dans cette partie, nous allons analyser le produit d’une manière précise en l’examinant de
l’extérieur, donc on va traiter son analyse fonctionnelle du besoin (AFB), ce qui nous amènera
à clarifier les points suivants :
Identifier le besoin à satisfaire.
Bien positionner le système dans son environnement.
Traduire le besoin en fonctions et les caractériser.
Le besoin est de Concevoir et Réaliser un bobinoir qui fait enrouler un fil de diamètre
allant de 4 à 8 mm.
Ce besoin doit être exprimé d’une manière concise et précise les buts du système en
posant les questions suivantes :
A qui rend-il service ?
Sur qui (quoi) agit-il ?
Dans quel but
Conception d’un bobinoir 19 Cherif Borhen
Projet de fin d’études 2013/2014
A qui rend ce service ? Sur qui (quoi) agit-il ?
A l’opérateur Fil acier dur
Bobinoir
Dans quel but ?
Permettre à l’utilisateur d’enrouler le fil sur la
bobine provenant d’une machine à
Tréfiler
Figure 9 : Diagramme bête à cornes
nous cherchons à valider ce besoin en prouvant son existence
a) Pourquoi ce produit existe-t-il ?
o Enrouler un fil de longueur 16977 m sur un bobinoir.
o Faciliter l’enroulage de fil d’acier dur
o Réduire le temps de manutention
o Assurer la sécurité de l’operateur
b) Pour quelle raison ?
Ce besoin existe parce qu’il y a une perte de temps et une difficulté d’enroulage
c) Qu’est ce qui pourrait le faire disparaitre ou le faire évoluer ?
Disparition : Disparition de l’emploi des bobines.
Conception d’un bobinoir 20 Cherif Borhen
Projet de fin d’études 2013/2014
Evolution : Intégration d’autres fonctions.
d) Y’a-t-il des risques de faire disparaitre le besoin ? De le voir évoluer ?
Pas de risques de disparition à moyen et à long terme.
Ce produit peut évoluer rapidement grâce au développement des systèmes
automatisés.
Nous venons de montrer que le besoin est bien valide.
II.4.1. Organigramme A-0
L’organigramme de la machine se présente comme suit (Figure 10)
Energies Opérateur
Ordre de commande Réglages
Fil enroulé
Fil non enroulé Bobinoir type BOS Bruit
Informations
Machine à bobiner
Figure 10 : Organigramme A-0
Conception d’un bobinoir 21 Cherif Borhen
Projet de fin d’études 2013/2014
II.4.1.1. Cycle de vie du système
Début Assemblage
Démolition Installation
Mise hors Mise
service
en Marche
Réparation Réglage
Entretien Usage
Normale
Figure 11 : Cycle de vie de la machine
Tout produit est en relation avec ses éléments environnants par des fonctions contraintes.
Comme tout système fonctionnel, la machine à bobiner va se situer dans le département
Tréfilerie et aura les éléments environnants suivants:
Opérateur
Fil
Bobine
Normes de sécurité.
Energie électrique et/ou hydraulique.
Conception d’un bobinoir 22 Cherif Borhen
Projet de fin d’études 2013/2014
Fiabilité.
Ergonomie.
Maintenance.
a) Diagramme de pieuvre
Le digramme pieuvre est constitué par les éléments environnants du système et permet de
mettre en relation ces éléments afin d’extraire la(les) fonction(s) principale(s) et les fonctions
contraintes.
Maintenance
Ergonomie Bobine
FC1 FC1
FC7 FP
Bobinoir FC2
Opérateur Fil
FC6 type BOS
FC3
FC5
FC4
Norme de
Fiabilité
sécurité
Energies
Figure 12 : Diagramme pieuvre du bobinoir
b) Identification des fonctions de services
La fonction principale de notre système est définie comme suit :
FP : Enrouler régulièrement le fil sur toute la largeur de la bobine,
Les fonctions contraintes sont :
FC1 : S’adapter à la dimension de la bobine,
FC2 : S’adapter aux dimensions des fils (diamètres différents),
Conception d’un bobinoir 23 Cherif Borhen
Projet de fin d’études 2013/2014
FC3 : Respecter les normes de sécurité pour l’opérateur et l’agent de maintenance.
FC4 : Être adaptable au réseau d’énergies disponibles.
FC5 : Assurer une bonne durée de vie.
FC6 : Permettre le chargement et le déchargement des bobines.
FC7 : Être facile à utiliser
FC 8: Accès simple pour les opérations de maintenance
II.4.1.2 Caractérisation des fonctions de services
Maintenant nous allons analyser ces fonctions en leurs donnant un niveau de flexibilité
qui résument entre autres les contraintes imposées par le client dans le cahier des charges.
Tableau 3 : Niveau de flexibilité
Classe de Niveau de
Flexibilité
flexibilité flexibilité
Nulle F0 Impératif
Faible F1 Peu négociable
Bonne F2 Négociable
Forte F3 Très négociable
Conception d’un bobinoir 24 Cherif Borhen
Projet de fin d’études 2013/2014
Tableau 4 : Caractérisation des fonctions de services
Critères Niveau Flexibilité
FP Type de la bobine Automatique F0
Temps opératoire Selon la longueur de fil F1
Fiabilité T min=5 ans F2
FC1 Diamètre extérieur 1600mm F0
Diamètre de noyau 800mm F0
Contre pointe Selon les indications F3
Largeur maximale Selon les indications F3
Largeur interne 1000 mm F0
FC2 Diamètre de fil en bobinage Maximum 8 mm F0
Type Minimum 4 mm F0
Fil acier à haut contenu en carbone F2
(acier dur)
C=0.85%
FC3 Sécurité opérateur Isoler la machine F0
Sécurité agent maintenance Variable logique: oui F0
FC4 Réseau électrique 400 V (+-10%) F1
Tension 50 Hz-3 phases
Fréquence
Energie pneumatique
Pression air comprimé 5bars (3 bars minimum) F1
82 dBA
Pression sonore F1
FC5
Environnement Fixation au sol ou support adéquat
Réduire les vibrations F2
FC6 Temps de réglage (chargement et 10 min F3
déchargement de la bobine)
FC7 Facilité d'utilisation Automate programmable F0
FC8
Qualification de l’intervenant Technicien F2
Montage et démontage
30 min F3
Conception d’un bobinoir 25 Cherif Borhen
Projet de fin d’études 2013/2014
II.5. Analyse fonctionnelle technique
Une fois le besoin a été bien identifié, le concepteur doit commencer par chercher les
solutions techniques qui satisferaient les fonctions caractéristiques du produit. Il procédera
par une analyse descendante en traduisant les fonctions de services en fonctions techniques
de plus en plus détaillées. Pour cela, on propose d’utiliser l’outil FAST qui représente, d’une
manière synthétique, un enchaînement logique de la décomposition des fonctions de services
(exprimé en langage utilisateur) en solutions techniques (exprimé en langage concepteur).
Puis, on va utiliser un nouvel outil de capitalisation de l’analyse fonctionnelle qui s’appelle
TAFT (Tableau de l’Analyse Fonctionnelle Technique).
La décomposition des fonctions de service est comme suit
FP1 : Mettre la
bobine en position.
FP2 : Entrainer la bobine en
rotation en maintenant une
FP : Enrouler
vitesse linéaire constante au
régulièrement le fil
fil.
sur toute la largeur
de la bobine
FP3 : Repartir le fil le long de
la bobine suivant le pas
correspondant à son diamètre.
Figure 13 : Décomposition de la fonction principale
Conception d’un bobinoir 26 Cherif Borhen
Projet de fin d’études 2013/2014
Contre- pointe
fixe
Soutenir
la bobine
Arbre
coulissant
FP1 : Mettre
Centrer la bobine Contre -
la bobine en
position. par rapport le pointe
dispositif de coulissante Fourreau
Trancannage Cylindrique
Maintenir Dispositif
la bobine à de
sa place Sécurité
Figure 14 : Solutions techniques possibles de FP1
Générer un Tourner la Moteur
mouvement broche de la principal
de rotation contre-pointe en C.A
FP2 : Entrainer la
bobine en rotation en Transmettre
Système poulie-
maintenant une vitesse la puissance
courroies
linéaire constante au fil. au système
Régler le
Réducteur à
couple
engrenage
transmis
Figure 15 : Solutions techniques possibles de FP2
Conception d’un bobinoir 27 Cherif Borhen
Projet de fin d’études 2013/2014
Deux poulies
Transformer le guide-fil
mouvement de Système de
rotation en trancanage. Chariot
mouvement de
FP3 : Repartir translation.
le fil le long
Double pince
de la bobine
pneumatique
suivant le pas
correspondant Transformer
à son diamètre. l’énergie électrique Moteur
en énergie C.A+transmissio
mécanique et n contrôlé par un
Adapter la puissance convertisseur
nécessaire.
Figure 16 : Solutions techniques possibles de FP3
Boutons de
Régler le pas de
régulation des
Trancanage
fins de course
FC1 : S’adapter à la
dimension de la bobine
Régler la largeur
de trancanage
Figure 17 : Décomposition de la première fonction contrainte
Conception d’un bobinoir 28 Cherif Borhen
Projet de fin d’études 2013/2014
Châssis en tôle de
Assure la
Protéger les grosse épaisseur,
protection contre
équipements soudée et
les blessures
normalisée.
FC3 : Respecter
les normes de Assurer la
protection contre Fil de terre et
sécurité pour
les chocs continuité de masse
l’opérateur et
l’agent de électriques
maintenance.
Assurer un Emplois des
niveau sonore actionneurs faisant un
bas minimum de bruit
Figure 18 : Décomposition de FC3
Automate
Siemens S7
Électrique
Disjoncteurs et
FC4 : Être contacteurs
adaptable au
réseau d’énergies
disponibles.
Distributeurs
Pneumatique
Tuyaux
Figure 19 : Décomposition de FC4
Conception d’un bobinoir 29 Cherif Borhen
Projet de fin d’études 2013/2014
Roulements
Choisir le guidage
en rotation adéquat Paliers
FC5 : Assurer Système vis-
Choisir le guidage
Limiter les écrou
une bonne en translation
frottements
durée de vie. adéquat Double pince
pneumatique
Réduire les Bloc silencieux
vibrations
Douilles à billes et
arbre en acier
Figure 20 : Décomposition de FC5
Régler la bande de
trancannage lors de
Assurer un fonctionnement
réglage facile
Temps arrêt
réglable
Assurer une position Assurer un accès
FC7 : Être facile aux éléments de
confortable lors de
facile à utiliser. machine
l’intervention
Assurer un bon
éclairage du système
en fonctionnement
Figure 21 : Décomposition de FC7
Conception d’un bobinoir 30 Cherif Borhen
Projet de fin d’études 2013/2014
Eviter les
assemblages
permanant
FC8 : Accès simple Eviter
pour les opérations l’encombrement
de maintenance des équipements
Utiliser des
liaisons
démontables
Figure 22 : Décomposition de FC8
Conclusion
Dans ce chapitre, nous avons décrit les différents composants de machine. Ensuite nous
avons donné une description du dérouleur. A l’aide d’une analyse fonctionnelle descriptive,
nous avons caractérisé les différentes fonctions offertes par la machine. Dans ce qui suit, nous
allons proposer un modèle CAO du bobinoir en effectuant le dimensionnement des différents
organes.
Conception d’un bobinoir 31 Cherif Borhen
Projet de fin d’études 2013/2014
Chapitre III : Calcul et dimensionnement
Conception d’un bobinoir 32 Cherif Borhen
Projet de fin d’études 2013/2014
Dans le présent chapitre, nous allons concevoir les différentes organes de machine,
ensuite nous allons dimensionner la contre pointe motrice en effectuant le calcul de moteur et
d’arbre et des roulements, par suite nous allons dimensionner les vérins utilisés et nous
finirons cette partie par une conception de système de trancanage.
III.1. Conception des différentes parties de machine
Toute la conception de cette machine a été faite avec le logiciel CAO « SolidWorks »,
utilisé par cette entreprise.
III.1.1. Démarche de conception
A partir de la géométrie de la bobine, on va concevoir les différentes pièces qui
constituent le bobinoir. Selon les dimensions de la bobine largeur (1050mm) et pour être
facilement libérée on a choisi de la placer à l’extrémité entre contre pointes. Une contre pointe
mobile qui assurer sa rotation, et une contre pointe coulissante pour la centrer lors de
bobinage.
III.1.2 Structure du bobinoir
La structure portante monolithique en tôles épaisses renferme tous les organes
mécaniques. Une portière dans le capot de protection permet d’accéder au logement bobine.
Les deux contres pointes sont bien couverts et sécurisés. Pour la partie droite de coté de contre
pointe motrice on a laissé suffisamment d’espace pour la motorisation du système (moteur-
accouplement-frein) et ont laissé un espace largement suffisant pour l’installation du moteur-
le branchement pneumatique et l’entretien. De côté gauche de bâti la contre pointe coulissante
bien protégé actionné par un vérin pneumatique qui peut être facilement installé. A l’arrière
on a pensé à une motorisation individuelle de système de trancannage.
Conception d’un bobinoir 33 Cherif Borhen
Projet de fin d’études 2013/2014
Cliquet
Vérin Bobine d’entrainement
hydraulique
Plateau
mobile
Contre
pointe
mobile
Contre pointe
coulissante
Figure 23 : Les différents composants du bobinoir
Flanc gauche Flanc droit
du bobinoir du bobinoir
Terrain
Figure 24 : Structure générale du bobinoir
Conception d’un bobinoir 34 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 25 : Vue 3D du bobinoir
III.1.3 Contre pointe motrice
L’arbre de la contre pointe tourne sur des roulements à l’intérieur d’un fourreau
cylindrique logé dans le flanc droit du bobinoir.la broche est fixée à la flasque gauche de
l’arbre. Deux cliquets d’entrainement sur la face externe de ces flasques servent à entrainer la
bobine dans ses deux joues comme indiqué sur la figure. (Annexe 4)
Conception d’un bobinoir 35 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 26 : Contre pointe motrice
III.1.3.1. Arbre Moteur
L’arbre de la contre pointe motrice liée directement à un moteur, tourne sur des
roulements encastrée avec la broche qui fait tourner la bobine. (Annexe 5)
Conception d’un bobinoir 36 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 27 : Modèle de l’arbre du contre pointe motrice
III.1.4 Contre pointe coulissante
La contre pointe est logée dans le flanc gauche du bâti. L’ensemble comprend un arbre
coulissant à l’intérieur d’un fourreau cylindrique. La pointe de centrage est fixée à l’extrémité
droite de l’arbre. Deux cylindres pneumatiques situés de part et d’autres de l’arbre entrainent
la pointe de centrage en avant et en arrière. (Annexe 6)
Conception d’un bobinoir 37 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 28 : Modèle de la contre pointe coulissante
III.1.5. Système de trancanage
L’action de trancaner consiste à enrouler Le câble spire par spire et couche par couche.
Le va et vient du câble devant la bobine est obtenu par le déplacement alternatif de la table de
guidage. Il est réalisé grâce à un retard d’angle (quelques degrés) du câble sur l’enroulement à
une vitesse dépendant de ce retard d’angle.
III.2. Calcul et dimensionnement
Dans cette partie nous allons choisir le moteur selon le couple calculée ensuite on va
chercher les efforts sur l’axe de transmission puis on vérifie la résistance de l’arbre moteur à
l’aide un calcul à la fatigue et enfin on va choisir le type de roulements convenables.
Conception d’un bobinoir 38 Cherif Borhen
Projet de fin d’études 2013/2014
III.2.1. Dimensionnement Moteur
Après la conception des différentes parties de la machine, on doit caractériser la
motorisation de système. La rotation de bobine est assurée par un moteur. Etant donné que la
rotation de bobine est pratiquement faible max 32rd/s et le masse de fil enroulé est très lourds
on a choisi de placer un réducteur. Il faut calculer le couple nécessaire afin de choisir le
meilleur moteur et réducteur.
III.2.2. Calcul du couple moteur
Afin de dimensionner le moteur, on doit calculer le couple nécessaire. Pour ce faire, on se
réfère à la formule suivante : [1]
Où:
Cacc : Couple nécessaire pour accélérer la masse.
Cfrot : Couple pour vaincre les frottements.
Cvisq : Couple pour vaincre la résistance visqueuse (fonction de la vitesse).
Ccharge : Couple pour déplacer la charge
Afin de dimensionner les composantes actives du bobinoir, on démarre notre analyse à
partir de l’extrémité de la bobine du côté de la charge. De cette façon, on intègre les masses
des composantes choisies au fur et à mesure dans le calcul servant au choix des composantes
qui les suivent.
Pour réaliser notre calcul, on utilisera le logiciel SolidWorks afin de déterminer les
moments d’inerties des composantes en rotation.
Grâce au logiciel SolidWorks, nous évaluons le moment d’inertie des pièces en rotation
ramené à l’axe de rotation du moteur
Conception d’un bobinoir 39 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 29 : Pièces en rotation autour de l’axe du moteur (Axe X)
Tableau 5 : Détermination de couple moteur
Paramètres de calcul Résultats de calcul
Moment d’inertie J J=2.73 10E4 kg.m²
Vitesse de rotation t
t= =
t =15 rd/s
Accélération angulaire
= = = 0.5 rd/s²
Ctot [2]Ctot = J x = 2.73 10E4 x 0.5 = 1.365 10E4 Nm
C totale C totale = 1365 x 1.25 = 1706.25 Nm
III.2.3. Choix de réducteur et moteur
Avec un rapport de réduction pratiquement constant = 47 le,
Moteur choisi est un motoréducteur à couple conique MBHGC200 SM1 80M4(18,5KW),
(Annexe 7).
Conception d’un bobinoir 40 Cherif Borhen
Projet de fin d’études 2013/2014
Tableau 6 : Caractéristiques de moteur choisi
Vitesse de sortie n2 = 30 trs/min
Couple de sortie T2 = 5418Nm
Facteur d’utilisation fu = 2,3
Rapport de réduction i= 47,22
Masse = 528Kg
Le réducteur choisi doit correspondre à la formule suivante : [3]
Pour notre cas, T2max vaut 5418 N alors que le second terme de l’équation vaut 3926,675 N.
La condition de fonctionnement est ainsi bien vérifiée.
III.2.4. Conception préliminaire de l’axe de transmission
L’arbre de la contre pointe motrice est soumis à différents efforts, on cherche à localiser
et calculer ces efforts.
III.2.4.1. Dimensionnement de l’axe de transmission
Pour effectuer l’enroulement de fil acier, le moteur va transmettre un couple Cm à l’arbre
de transmission guidé en rotation par deux roulements à billes à contact radial. Cet arbre est
supposé encastré sur la contre pointe coulissante du bobinoir qui exerce une force de poids F
modélisé au point A. La somme des couples résistants est modélisée par Cr.
Le schéma cinématique de l’arbre de transmission est présenté par la figure 30
Figure 30 : Schéma cinématique de l'arbre de transmission
Conception d’un bobinoir 41 Cherif Borhen
Projet de fin d’études 2013/2014
III.2.4.2. Calcul des actions mécaniques aux liaisons
On suppose que les liaisons soient parfaites, on a : [4]
0 Cr
1 A F 0 : Action du poids du système et du couple résistant.
0 0
A
XB 0
2 YB 0 : Action de la liaison rotule en B.
B
Z 0 B
B
0 0
3 YC 0 : Action de la liaison linéaire annulaire en C.
C
Z 0 C
C
0 Cm
4 0 0 : Action du couple moteur.
D
0 0
D
Le Principe fondamental de la statique donne : 0
i B
En transférant les torseurs au point B, nous obtenons :
0 Cr X B 0 0 0 0 Cm
F 0 YB 0 YC bZC 0 0 0
0 aF Z 0B ZC bYC B 0 0 B
B B
Le tableau 7 regroupe les différentes réactions d’appuis, ainsi que les données
dimensionnelles du système.
Conception d’un bobinoir 42 Cherif Borhen
Projet de fin d’études 2013/2014
Tableau 7 : Réaction d’appuis et données dimensionnelles du système
Données dimensionnelles Valeurs
Distance entre le plateau et roulement A=655 mm
Distance entre les deux roulements B=311 mm
Distance entre roulement et extrémité de C=115
l’arbre
Force extérieure F=31360
Résultante de la force normale en B Xb=0 N
Résultante de la force normale en B Yb=98415, 68N
Résultante de la force normale en B Zb=0 N
Résultante de la force normale en C Yc=67055, 95N
Résultante de la force normale en C Zc=0 N
Couple Moteur Cm=5418 Nm
Couple Résistant Cr=5418 Nm
XB 0
F Y Y 0
B C
Z B Z C 0
Cr Cm
bZ C 0
aF bYC 0
III.2.4.3. Efforts de cohésions
La détermination des efforts de cohésion de système, il faut déterminer les efforts de
cohésion pour chaque tronçon de la structure : le tronçon [AB], le tronçon [BC] et pour le
tronçon [CD]. Le tableau 8 résume les différentes expressions des efforts de cohésion.
Conception d’un bobinoir 43 Cherif Borhen
Projet de fin d’études 2013/2014
Tableau 8 : Détermination des efforts de cohésion
Le tronçon Le tronçon [BC] Le tronçon
[AB] [CD]
Effort normal(N) N=0 N=0 N=0
Effort tranchant sur y (N) Ty=F = Ty=F-Yb=31360- Ty=F-Yb-
31360 N 98415.95 Yc=0N
= -67055.95 N
Effort tranchant sur z (N) Tz=0 Tz=-Zb=0 Tz= 0N
Effort tranchant En posant T=31360 N T=67055.95N T=0N
T Ty ² Tz ²
Moment de torsion (N.m) Mt=-Cr=- Mt= - 5418 Nm Mt= - 5418
5418Nm Nm
Moment de flexion sur y (N.m) Mfy=0 Mfy=0 Mfy=0
Moment de flexion sur z (N.m) Mfz= -xF Mfz=-xF-(a-x) Nm Mfz =0 Nm
= - 31360x
Nm
Moment Mf=31360 x Mf=|67055.95x- Mf= 0 Nm
fléchissant Mf Mfy ² Mfz ² Nm 65446.60| Nm.
Pour chaque tronçon on associe un torseur de cohésion
Pour le tronçon [AB], on a 0 x a .On applique le PFS en G :
Conception d’un bobinoir 44 Cherif Borhen
Projet de fin d’études 2013/2014
0 Cr
coh G F 0 0
0 0
A
0 Cr x 0 Cr
M G M A GA F 0 0 F 0
0 0 0 0 xF
0 Cr
coh G F 0 0
0 xF
G
Pour le tronçon [BC] on a : a x a b . On applique le PFS en G :
0 Cr X B 0
coh G F 0 YB 0 0
0 xF Z 0
G B B
X B x a X B 0
M G M B GB YB 0 YB ( x a ) Z B
Z 0 Z (a x)Y
B B B
0 Cr X B 0
coh G F 0 YB ( x a ) Z B 0
0 xF Z (a x)Y
G B B G
Pour le tronçon [CD] on a : a b x a b c . On applique le PFS en G :
0 Cr X B 0 0 0
coh G F 0 YB ( x a)Z B YC 0 0
0 xF Z (a x)Y Z 0
G B B G C C
0 a b x 0 0
M G M C GC YC 0 YC Z C (a b x)
Z 0 Z Y (a b x)
C C C
Conception d’un bobinoir 45 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 31 : Diagramme des efforts tranchants
Figure 32 : Diagramme des moments fléchissant
Conception d’un bobinoir 46 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 33 : Diagramme des moments de torsion
III.2.5. Calcul d’arbre moteur
Pour le choix de matériau de l’arbre, on va adopter le 42CD4 pour sa bonne résistance à
l’usure et à la fatigue, sa bonne usinabilité, il est employé essentiellement pour la fabrication
des arbres de transmissions, engrenages, bielles etc. et sa grande disponibilité dans le marché.
L’arbre de la contre pointe motrice est sollicité en flexion et torsion. Les propriétés du 42CD4
sont Rp0.2=900MPa et RM=1100MPa. Ces sollicitations sont purement alternées R= -1.
(Annexe 8)
D’après les diagrammes représentatifs des efforts tranchants et des moments de torsion et
fléchissant, on remarque que la section la plus sollicitée est celle de l’abscisse x=a :
MF max=20854 Nm
Mt max=5418 Nm
III.2.5.1 Détermination de coefficient de sécurité
Lors d’un calcul de dimensionnement, la connaissance du coefficient de sécurité souhaité
permet de déterminer la dimension minimale requise de la section étudiée. Pour un calcul de
vérification, on détermine la valeur réelle du coefficient de sécurité et on la compare au
coefficient de sécurité souhaité.
Conception d’un bobinoir 47 Cherif Borhen
Projet de fin d’études 2013/2014
En utilisant les contraintes nominales du chargement de fatigue σme et σae et les facteurs
d’influence:
o Concentration de contrainte Kt et Kf
o Etat de surface Ks
o Effet d’échelle Ke
o Effet du mode de sollicitation Kp
On peut calculer un coefficient de sécurité pour l’arbre par une méthode analytique ou
graphique.
III.2.5.1.1Calcul à la fatigue
La plupart des pièces mécaniques, au cours de leur fonctionnement, sont soumises à des
sollicitations variables dans le temps. Ce type de sollicitations entraîne des variations
cycliques des contraintes qui peut provoquer la rupture brutale par le phénomène de la fatigue
du composant mécanique même si ces contraintes sont très faibles par rapport à la limite
élastique du matériau.
détermination des contraintes équivalentes
La contrainte alternée équivalente σae est calculée à partir des contraintes alternées nominales
et prend en compte les défauts, à partir du critère de Von Mises :
σae= [5]
Avec :
σfa :contrainte alternée de flexion :σfa= ;
τa : contrainte alternée de torsion : τa=
Mfa= = 20854 Nm
Mta= = 5418 Nm
Conception d’un bobinoir 48 Cherif Borhen
Projet de fin d’études 2013/2014
D’où σfa= = 212,417 MPa
Et τa = = 27.6 MPa
Finalement
σae= = 47,80 MPa
La contrainte moyenne équivalente σme=0(car les sollicitations sont purement
alternées).
III.2.5.1.2. Calcul des effets de concentration
Généralement les pièces de machine possèdent des changements brusques de section. De
plus elles sont rarement utilisées dans des conditions idéales et subissent des chargements
quelconques. Il faut alors tenir compte de ses différents facteurs.
a) Effet du mode de sollicitation Kp
L’arbre est sollicité en flexion rotative donc Kp=1
Tableau 9 : Coefficient Kp selon le mode de sollicitation
b) Facteur de l’état de surface
Pour caractériser l’influence de l’état de surface sur la tenue de l’arbre en fatigue, on
définit un facteur Ks appelé facteur d’état de surface. Il est en fonction de rugosité de surface.
On suppose que la rugosité de l’arbre est R t=15µm.Ks est déterminée à partir des abaques.
Conception d’un bobinoir 49 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 34 : Facteur de service Ks en fonction de la rugosité et Rm
c) effet d’échelle
L’effet d’échelle en fatigue procède de l’observation suivante : à contrainte nominale
égale, plus les dimensions d’une pièce croissent, plus sa résistance à la fatigue diminue.
On prend le petit diamètre de l’arbre d=100 mm
Figure 35 : Coefficient Ke en fonction du diamètre de l’arbre
A partir de la figure on obtient Ke =0,75
d) facteur de concentration de contraintes
Si la pièce présente des discontinuités de forme (entailles, épaulements, rainures,
trous…), autour de ces zones les contraintes réelles sont beaucoup plus importantes que les
Conception d’un bobinoir 50 Cherif Borhen
Projet de fin d’études 2013/2014
contraintes nominales obtenues à partir des calculs classiques de RDM. Ce phénomène local
est appelé phénomène de concentration de contraintes.
Géométrie de l’arbre
Figure 36 : Géométrie de l’arbre moteur
Il existe deux facteurs de concentration de contraintes en flexion et deux autres pour la
torsion. Il faut retenir la valeur maximale des quatre facteurs .A l’aide de logiciel SolidWorks
on détermine
= = 0.55 mm
=0,05 mm
A partir des abaques Kt=2,8
Conception d’un bobinoir 51 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 37 : Abaques Kt en fonction du rapport d/D et r/t
e)Facteur de concentration effectif Kf
Kf est défini comme étant le rapport de la limite d’endurance d’un échantillon lisse à la
limite d’endurance de l’échantillon possédant des foyers de concentration de contrainte. Kf est
déterminé à partir des abaques
Figure 38 : Rapport Kf/Kt en fonction du Rm
Nous choisissons ainsi : Kf= 0,8×2,8 = 2.24
III.2.5.1.3. Calcul de coefficient de sécurité
La limite d’endurance de l’acier 42CD4 peut être déterminée soit avec la courbe de
Wöhler soit avec la méthode d’escalier. La limite d’endurance de l’acier 42CD4
σD = 195MPa. [6]
Conception d’un bobinoir 52 Cherif Borhen
Projet de fin d’études 2013/2014
La limite d’endurance de l’arbre est définie par la formule suivante [7]
σDarbre = = = 59.41Mpa
Le coefficient de sécurité de l’arbre S= = 1,24 [8]
Le coefficient de sécurité limite S’ = = 4,07
L’arbre résiste en fatigue avec un coefficient de sécurité confortable. On prendra donc
S=1,24
III.2.5.2 Vérification de diamètre de l’arbre
Les propriétés du 42CD4 sont Rp0.2=900MPa et Rm=1100MPa.La contrainte admissible
est défini par σ= = 725,8 MPa
D’après le critère de Von Mises
d≥ = 67 mm
Le diamètre de l’arbre minimal est 100mm.
L’arbre du moteur est lisse et de Ø 100mm, et pour faciliter la conception, on prendra
L’accouplement Eco flex avec pièce d’espacement, taille M, pour distance entre bouts
d’arbres de 180 mm, alésages ø102 mm et ø115 mm H7 avec clavetages normalisés suivant
ISO R773 (Annexe 9).
Donc désormais, on prendra un diamètre minimal de 100mm pour l’arbre de
transmission.
III.2.6. Calcul de roulements
L’étude de l’arbre a montré que des forces de réaction axiales et radiales doivent être
reprises pour garder l’arbre en équilibre.
Conception d’un bobinoir 53 Cherif Borhen
Projet de fin d’études 2013/2014
Fr= et des charges axiales nulles et
pour faciliter le montage des roulements et l’usinage de l’arbre, on a préféré de prendre coté
moteur des roulements rigides à une rangée de billes à contact radial, à rainure profonde type
SKF. (Annexe 10)Ses caractéristiques sont :
d= 180 mm
D=280 mm
B=31 mm
C=183KN
C0=146KN
Vitesse de référence=4800/tr
Après avoir choisi le type de roulement, on vérifie leur résistance à la sollicitation statique et
dynamique
Charge statique équivalente
Lorsque la charge agissant sur un roulement ne correspond pas aux conditions définies
pour la charge statique de base P0, il est nécessaire de calculer une charge statique
équivalente, charge fictive provoquant les mêmes déformations permanentes que la charge
réelle. On l’obtient à l’aide de la formule générale :
P0 = X0Fr + Y0Fa
Pour le calcul de P0, il faut retenir la charge maximale qui puisse se produire et introduire
ses composantes radiale et axiale. Si une charge statique agit sur un roulement dans
différentes directions, l’intensité de ces composantes variera. Dans de tels cas, il convient
d’utiliser les composantes de la charge donnant la plus grande valeur de charge statique
équivalente.
Coefficient de sécurité statique
La formule suivante donne la charge statique de base C0 nécessaire :
C0 = s0 P0
Conception d’un bobinoir 54 Cherif Borhen
Projet de fin d’études 2013/2014
C0 : charge statique de base,
P0: charge statique équivalente,
S0 : coefficient de sécurité statique
Pour les roulements à billes le coefficient de sécurité s0 =1(annexe 11)
P0=Fr N
P0b=Yb =98415.68 NC0
P0c=Yc =67055.95 N C0
Les roulements supportent la charge statique équivalente ainsi le critère est validé pour
les deux roulements.
III.2.6.1. Validation sous sollicitation dynamique
FA
On a 0 pour les deux roulements vu que FA =0, selon le guide des sciences et
FR
FA
technologies industrielles on a e donc la charge dynamique équivalente P FR .
FR
Donc on a Pb=98415.68 N et Pc=67055.95 N
Durée de vie nominale L10 :
3
C
L10 106
Pi
On a (L10) b= ×106=1.85 ×106tours et
(L10) c= ) ³×106=2.72×106 tours
Durée de vie en heure de fonctionnement : Lh :
106
Lh L10 (Heure)
60 N
Conception d’un bobinoir 55 Cherif Borhen
Projet de fin d’études 2013/2014
On suppose que l’arbre moteur tourne à sa vitesse maximale N=30 tr/min.
Lhb=1.027×109 heures
Lhc=1.51 ×109 heures
On suppose que le moteur va fonctionner à raison de 20h/jours, or MTBF=5ans.
Donc le temps d’utilisation est tu=5x260x20=26000h alors :
tu< Lhb et tu< Lhc
d’où la durée de vie est validée.
Finalement, le choix des roulements est désormais définitif.
III.3. Conception du système de trancanage
Le vas et viens de fil est assuré par une translation du table de guidage. On a pensé à séparer
l’entrainement de deux systèmes (rotation du bobine et translation du table) par la
motorisation individuelle du chacun du mécanisme. Pour cela on a choisi de placer un moteur
asynchrone piloté par un variateur de vitesse pour une bonne synchronisation de la vitesse
d’enroulement et la vitesse de déplacement de la table de guidage, une transmission poulie
courroie du moteur vers une vis écrou lié à la table de guidage.
III.3.1. Motorisation individuelle du système de trancanage
On modélise le mécanisme à vis de commande de déplacement de table du bobinoir par la
figure 39.
Conception d’un bobinoir 56 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 39 : Modélisation du système de trancannage
Ce mécanisme est constitué par :
o Un moteur asynchrone à vitesse variable (piloté par un variateur de vitesse)
o Un réducteur à courroies de rapport de réduction i1 et de rendement η1
o Un ensemble de vis écrou de rapport de transmission iv et de rendement ηv constitué
d’une vis d’inertie propre Jv, d’un écrou lié à une table de guidage de masse met
animé d’une vitesse variable v (on va jouer sur la vitesse maximale). Ce chariot
nécessite un effort de déplacement Q.
o La masse de la table de guidage : m= 27 Kg.
o La vis de transmission est une vis trapézoïdale de pas p = 10 mm et de longueur
L=1650mm et d’inertie propre: Jv
III.3.1.1. Calcul de Jv
La vis est assimilée à un cylindre de diamètre 𝑑𝑚𝑜𝑦 et de longueur L= 1650 mm
Conception d’un bobinoir 57 Cherif Borhen
Projet de fin d’études 2013/2014
Tableau 10 : Caractéristiques de la vis
Paramètres de vis Résultats de calcul
Longueur de la vis L L=1650 mm
Diamètre de la vis d d=50mm
Diamètre moyen de la vis 𝑑𝑚𝑜𝑦 𝑑𝑚𝑜𝑦=𝑑−0,6495×𝑝=43,505 𝑚𝑚
Volume de la vis V =L×π×𝑟𝑚𝑜𝑦2
Masse de la vis M M= ρ×V = ρ× L×π×𝑟𝑚𝑜𝑦2=18.8 kg
Inertie propre de la vis
Jv = =0.004 Kg m2
Les rendements considères sont :
Pour la transmission poulie courroie η1 = 0,85
Pour le système vis-écrou : ηv= 0,4
L’effort nécessaire au déplacement du chariot dépend bien de beaucoup de paramètres
d’usinage et de leur variation. On suppose que l’effort Q résistant équivalent sur la table de
guidage vaut Qéqu = 250 N.
III.3.1.2. Condition de fonctionnement nominale
La vitesse maximale de rotation de la vis 𝑁𝑚𝑎𝑥 est calculée à partir de la vitesse
nominale N du moteur existant et du rapport de réduction R. On a : N= 2500 trs /min
* d’après la cinématique de la machine, on aura : R= 0,25
On obtient ainsi : 𝑁𝑚𝑎𝑥=𝑁×𝑅= 625 trs /min
𝑉𝑚𝑎𝑥 = Avec : P : pas de vis = 10 mm
𝑉𝑚𝑎𝑥 : C’est la vitesse maximale de rotation de la vis, 𝑉𝑚𝑎𝑥 = 104,16 mm/s
D’où la puissance d’entrainement nécessaire est égale a :
Conception d’un bobinoir 58 Cherif Borhen
Projet de fin d’études 2013/2014
Pne= ×
Le facteur de correction d’altitude kh = 1 puisque le moteur est installé une hauteur
inferieure a 1000 mm.
Le facteur de correction de température kT = 1 puisque système est installé en plein air a
une température inferieur a 400C.
Le facteur de surcharge mécanique est détermine suivant le fonctionnement du moteur,
on prend km = 1,15.
= η1× ηv
Pne = 88 w
La puissance nominale doit être supérieure à la puissance nécessaire à l’entrainement.
Moteur choisi Type : LSMV 80 L (Annexe 12)
Tableau 11 : Caractéristiques de moteur choisi
Puissance nominale : 0,55 KW Couple nominal : 3,7 Nm
Tension nominale : 230 / 400 V Rendement : 0,73
Courant nominal : 1,65 A Masse : 8,2 Kg
Vitesse nominale : 1420 trs / min 𝛼=2,7
Pn=550 w ≥ =120, 54 w
La condition de fonctionnement nominale est bien vérifiée.
III.3.1.3. Encombrement
Avant d’installer notre moteur, il faut prendre une idée sur les côtes données par le
catalogue du constructeur (Annexe 13) :
Conception d’un bobinoir 59 Cherif Borhen
Projet de fin d’études 2013/2014
Largeur du moteur (AB) : 157 mm
Longueur du moteur (LB) : 212 mm
Hauteur de l’axe rapport (H) : 80 mm
Longueur de l’arbre moteur (E) : 50 mm
Diamètre de l’arbre moteur (D):19 j6
Figure 40 : Modélisation du système de trancannage
III.3.2. Système d’entrainement de mécanisme
La rotation de la vis est assuré par un le moteur choisi à l’aide d’une transmission poulie-
courroie
III.3.2.1. Calcul de courroie
On a choisi d’utiliser une transmission par poulies courroies pour assurer le mouvement
de rotation de la vis [9]
Conception d’un bobinoir 60 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 41 : Disposition du mécanisme
Les étapes de calcul de courroie sont comme suit :
Etape 1: Les données nécessaires :
Puissance : 0,55 Kw
Vitesse d’entrée : 1420 trs /mn
Vitesse de sortie : 710 trs /mn
L’entraxe approximatif ea= 320 mm
Etape 2 : Choix de la durée de vie :
S = facteur de service
Ce facteur dépend de la nature des organes moteur et récepteur et de la durée du service
journalier.
Notre machine est à couple variable et la condition de fonctionnement est de 24 heures
par jours (Annexe 14) On choisit S= 1,4 (Annexe 15)
Etape 3 : Calcul de la puissance corrigée (en KW) :
Pc = S.P = 1,4 x 0,55 = 0,77KW Cette puissance nous permet le choix d’une section
de courroie normalisée.
Conception d’un bobinoir 61 Cherif Borhen
Projet de fin d’études 2013/2014
Etape 4 : Choix de la section S de courroie :
On a une puissance Pc=0,77 KW et une vitesse de 1420 trs/min. D’après l’Annexe 16,
on choisit la section de courroie XPZ.
Etape 5 : Rapport de transmission R:
R : Ce rapport nous permet de choisir le couple de poulies normalisées.
R= =2
Etape 6 : choix des poulies normalisées d1et d2 (en mm) :
L’annexe 17 propose un couple de poulies normalisées offrant un rapport R= 2 On aura
donc :
d1=75 mm ; d2=150 mm
Etape 7: Vitesse linéaire de la courroie V (en m/s):
On doit vérifier que la vitesse de la courroie n’excède pas la valeur limite indiqué dans
l’annexe 17.
V= = 5, 57 m/s < 45 m/s
Etape 8 : Longueur approximative de la courroie La (en mm):
La= 2ea + 1,57 (d1+d2) +
AN : La= 2x320 +1,57 (75+150) + = 997,64 mm
Cette longueur approximative (La) permet le choix d’une longueur standard.
Etape 9 : choix de la Longueur standard L (en mm):
D’après la gamme de longueurs normalisées, on choisit L=1000 mm (Annexe 18)
Conception d’un bobinoir 62 Cherif Borhen
Projet de fin d’études 2013/2014
Etape 10 : Détermination de l’entraxe réel par le calcul (en mm):
𝑒r : Entraxe réel.
𝑒r= [L− 1,57x (𝑑1+𝑑2)] − = 321,2 mm
Etape 11 : calcul de puissance nette P0 (en KW):
La puissance nette est la puissance transmissible par un brin de courroie dans la série
déterminée en début de calcul. P0 est déterminée à partir de l’annexe 19 en connaissant d1 et
N1.
P0 = 2,1 KW.
Etape 12 : Nombre de courroies:
On peut déterminer le nombre de courroies suivant la formule suivante :
N= = =0,4 soit une seule courroie
Avec :
Pc: puissance corrigée
P0 : puissance brute transmissible
a : facteur de correction d’arc de contact (Annexe 17) =0.23 d’où a=0.97
CL : facteur de correction de longueur (Annexe18) : L=1000 d’où CL= 0,9
Pour le système de trancannage, on valide le moteur LSMV 80, deux poulies motrices de
diamètre respectives 75 et 150mm et une courroie de section normalisée XPZ et de
longueur L=1000 mm.
Conception d’un bobinoir 63 Cherif Borhen
Projet de fin d’études 2013/2014
III.4. Dimensionnement des vérins
Notre machine comprend trois vérins hydrauliques. Le vérin 1 sert à dégager la bobine de
la contre pointe motrice, le vérin 2 sert à centrer la bobine en faisant translater la contre pointe
coulissante, le vérin 3 situé au-dessous de la bobine, après l’opération de bobinage et pendants
le déchargement, le vérin pousse la bobine en haut pour aider l’opérateur à libérer la bobine
de la machine.
Le dimensionnement du chaque vérin permettra de définir la taille du vérin, c’est-à-dire
son diamètre de piston et le diamètre de l’alésage en fonction des données du cahier des
charges de l’application, qui sont :
o la fonction opérative du vérin ;
o la situation de montage ;
o la course ;
o la masse déplacée ;
o la charge appliquée ;
o le temps d’action requis.
Vérin 1
Vérin 2
Vérin 3
Figure 42 : Placements des vérins
Les données relatives à chaque vérin sont représentées dans le tableau 12.
Conception d’un bobinoir 64 Cherif Borhen
Projet de fin d’études 2013/2014
Tableau 12 : Caractéristiques des vérins
Extrémité de
Fixation Corps du vérin Course
tige
Fixée
Vérin 1 Bride avant rigidement 400 mm
guidée
Tenon Articulation
Vérin 2 400 mm
intermédiaire guidée
Fixée
Vérin 3 Bride avant rigidement 400 mm
guidée
III.4.1. Calcul
On cherche à déterminer le diamètre de l’alésage et de tige de chaque vérin
III.4.1.1. Calcul Vérin 1 et 3
Les vérins 1 et 3 possèdent les mêmes caractéristiques et déplacent la même charge
(masse de la bobine).Pour dimensionner ces deux vérins, il faudra suivre ces démarche. [10]
Etape 1 : calcul de la charge appliquée, la force théorique et la section.
Charge= M×g = 3200×10=32000 N=3200daN
Force théorique : Fth = = = 3555.6 daN
Section Sc = = = 17,778 cm2
Etape 2: choix de section et diamètre de l’alésage.
On choisit la section normalisée Sa la plus proche de Sc. (Annexe 20)
Section normalisée : Sa = 19,63 cm2
Diamètre de l’alésage Øa = 50 mm
On a deux choix pour la tige. (Annexe 20)
Conception d’un bobinoir 65 Cherif Borhen
Projet de fin d’études 2013/2014
Øt = 28 mm ou Øt = 36 mm
Section annulaire 13,48 ou 21 cm2
Etape 3 : vérification au flambage et choix de diamètre de tige
Pour choisir le diamètre de tige, il faudra vérifier sa résistance au flambage.
Sous l’action d’une charge axiale, la tige du vérin est sollicitée au flambage. Plus la
course est longue et le diamètre de tige petit, plus le flambage est élevé.
Figure 43 : Tige du vérin flambant
On cherche le facteur de fixation d’après l’annexe 21
Fc =0,5 N
La Longueur libre de flambage Lf est donnée par la formule suivante
Lf = Fc × course = 0,5× 400= 200 mm
On trace les droites passant respectivement par (Fth, 0) vertical et (0, Lf) horizontale et on
regarde l’intersection (I).
Les courbes se trouvant en dessous de I flambent
Les diamètres se trouvant en dessus ne flambent pas
Conception d’un bobinoir 66 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 44 : Traçage du point I
Les deux tiges ne flambent pas
On retient, donc, Øt = 28 mm
III.4.1.2. Calcul vérin 2
Le vérin 2 sert à translater la contre pointe coulissante pour centrer la bobine. Pour
garantir que la bobine est en équilibre lors de bobinage, il faut que charge appliqué au vérin
est de même valeur que le couple résistant. On applique la même démarche pour le calcul
Etape 1 : calcul de la charge appliquée, la force théorique et la section.
Charge = 13545 N = 1354daN
Force théorique : Fth = = = 1504,4 daN
Section Sc= = = 7,52 cm2
Etape 2: choix de section et diamètre de l’alésage.
Conception d’un bobinoir 67 Cherif Borhen
Projet de fin d’études 2013/2014
On choisit la section normalisée Sa la plus proche de Sc (Annexe 20)
Sa = 8,04cm2
Alésage Øa = 32 mm
On a deux choix pour la tige
Øt = 16 mm ou Øt = 22 mm
Section annulaire = 6,03 cm2
Etape 3 : vérification au flambage et choix de diamètre de tige
On cherche le facteur de fixation d’après l’annexe 21
Fc =1,5
Lf = Fc × course = 1,5× 400= 600 mm
On retient Øt = 22 mm. D’après la figure 46
Figure 45 : Traçage du point I
Conception d’un bobinoir 68 Cherif Borhen
Projet de fin d’études 2013/2014
Conclusion
Dans ce qui précède, on va suivre une méthode de calcul structurée pour valider le
choix des différents composants (arbre-moteur-roulement-système de trancannage-vérins).On
étudiera, dans le chapitre suivant, la résistance du bobinoir au chargement et au flambage.
Conception d’un bobinoir 69 Cherif Borhen
Projet de fin d’études 2013/2014
Chapitre IV Analyse des contraintes appliquées sur
la bobine
Conception d’un bobinoir 70 Cherif Borhen
Projet de fin d’études 2013/2014
On étudie dans cette partie le comportement de la bobine face à la masse de fil enroulé et
face au flambement.
IV.1. Vérification de résistance au chargement
Le but de cette étude est de déterminer la résistance de la bobine à la masse de fil enroulé
sur toute sa largeur à l’aide de logiciel Abaqus 6 .10. L’étude se basera sur une analyse
statique des contraintes et des déformations, correspondantes à un cas de charge maximal de
la bobine aux conditions réelles.
IV.1.2. Méthode d’éléments finis
La méthode éléments finis MEF est basée sur une idée simple : subdiviser (discrétiser)
une forme complexe en un grand nombre de sous-domaines élémentaires de forme
géométrique simple (éléments finis) interconnectés en des points appelés nœuds.
Figure 46 : Nœuds du maillage d’une bille
Nous considérons le comportement mécanique de chaque élément séparément, puis nous
assemblons ces éléments de telle façon que l’équilibre des forces et la compatibilité des
déplacements soient satisfaits en chaque nœud.
La MEF utilise des approximations simples des variables inconnues dans chaque élément
pour transformer les équations aux dérivées partielles en équations algébriques.
Les nœuds et les éléments n’ont pas forcement de signification physique particulière,
mais sont basés sur des considérations de précision de l’approximation.
Conception d’un bobinoir 71 Cherif Borhen
Projet de fin d’études 2013/2014
IV.1.2.3. Etapes logiques du calcul par éléments finis : [11]
1. Définir les nœuds et les éléments (Créer le maillage)
2. Pour chaque élément, établir la matrice de rigidité élémentaire [Ke] reliant les
degrés de libertés (déplacements) nodaux {ue} et les forces {fe} appliquées aux
nœuds : [Ke] {ue} = {fe}
3. Assembler les matrices et les vecteurs élémentaires en un système global
4. [K] {U} = {F} de manière à satisfaire les conditions d’équilibre aux nœuds
5. Modifier le système global en tenant compte des conditions aux limites
6. Résoudre le système [K] {U} = {F} et obtenir les déplacements {U} aux nœuds
7. Calculer les gradients (flux de chaleur, déformations et contraintes) dans les
éléments et les réactions aux nœuds sur lesquels les conditions aux limites sont
imposées.
IV.1.2.4. Etapes pratiques du calcul par éléments finis
Organisation générale d’un code de calcul
Pré-processeur
Solveur
Post-processeur
Pré-processeur :
Maillage (type d’éléments, nombre de nœuds)
Propriétés géométriques et
physiques de la structure
Sollicitations externes
Conditions aux limites
Solveur :
Choisir le type d’analyse (statique, dynamique,…)
Matrice de rigidité K et le vecteur de forces nodales F
Conception d’un bobinoir 72 Cherif Borhen
Projet de fin d’études 2013/2014
Détermination des déplacements et forces nodales inconnus [K] {U} = {F}
Calculer les variations additionnelles (gradients, réactions, σ, ε…)
Post-processeur :
Présenter les résultats de façon intelligible et synthétique : sous forme numérique
ou sous forme graphique.
Effectuer des fonctions complémentaires : combinaisons, interprétations,
interpolations, animation, …
IV.1.3. Etude de la bobine sous Abaqus
Pour calculer le champ de contrainte et la déformé en tout point du modèle nous avons
besoin de discrétiser notre géométrie et extraire le comportement mécanique pour chaque
élément.
IV.1.3.1. Le préprocessing
On va entrer la géométrie en Abaqus, affecter les propriétés mécaniques, appliquer les
sollicitations et définir le maillage.
IV.1.3.1.1. Modélisation géométrique
On va importer la géométrie de la bobine du fichier SolidWorks (Fichier SLDPRT
(.SLDPRT)) (Annexe 2).Le fichier importé dans Abaqus est de format IGES*.
Figure 47 : Géométrie importé de la bobine
Pour le cas de fil en acier dur on a choisi de le représenter par un cylindre creux de
même diamètre minimal 800mm que la bobine et de diamètre maximal 1100 mm qui
Conception d’un bobinoir 73 Cherif Borhen
Projet de fin d’études 2013/2014
correspond à la rangée numéro 35(annexe 3).La géométrie de fil est représentée par la figure
48.
Figure 48 : Géométrie crée de fil acier
IV.1.3.1.2. Création des matériaux
On définit les propriétés mécaniques des matériaux constitutifs des deux pièces .Nous
affectons les mêmes caractéristiques mécaniques aux deux géométries.
Densité 7,8 E-006Kg/mm 3
Module d’Young 210000Mpa
Coefficient de poisson 0,3
Limite élastique Re=235Mpa
IV.1.3.1.3. Assemblage des pièces
On positionne les deux pièces les uns par rapport aux autres. La géométrie de fil est
collée sur toute la largeur de bobine.
Conception d’un bobinoir 74 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 49 : Bobine et fil assemblés
IV.1.3.1.4. Fixation et chargements
On spécifie dans ce module les chargements à appliquer aux deux pièces
Les conditions aux limites :
Fixation du bobinoir sur les extrémités 0ddl
Chargement gravity uniforme 6000 N(masse de la bobine 600Kg) pour la bobine .
Chargement gravity 26000 N (masse de fil 2600Kg) pour le fil dirigé vers le bas
axe
Figure 50 : Chargement de la bobine
IV.1.3.1.5. Maillage
Le but du maillage est d’obtenir une distribution de contraintes et de déformations sur
toute la structure.
Le maillage choisi pour le bobinoir est un maillage tétraédrique de taille globale 100
éléments.
Conception d’un bobinoir 75 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 51 : Bobine maillée
Le maillage choisi pour le fil est un maillage hexagone de taille globale 170 Explicit
Figure 52 : Géométrie du fil maillée
IV.1.3.2. Le Postprocessing
Critère de résistance [12] : un critère de plasticité, ou critère d'écoulement plastique, est un
critère permettant de savoir, sous des sollicitations données, si une pièce se déforme
plastiquement ou si elle reste dans le domaine élastique. De nombreux essais ont montré que
l'on pouvait utiliser deux critères principaux : le critère de Tresca-Guest ou le critère de Von
Mises. En résistance des matériaux, on désire parfois rester dans le domaine élastique, on
parle alors de critère de résistance.
La figure 53 montre la répartition de contrainte (basé sur la théorie de Von Mises). Elle
confirme que les contraintes du bobinoir découlent principalement du poids de fil enroulé.
Conception d’un bobinoir 76 Cherif Borhen
Projet de fin d’études 2013/2014
La figure 54 montre le déplacement de la bobine : l’action de poussée de fil entraine un
déplacement sur toute la largeur de la bobine.
Les résultats obtenus sont :
la contrainte Von MisesσVM =232 MPa
Figure 53 : Vérification du critère de Von Mises
Le déplacement résultant 1,24 mm sur la bobine
Figure 54 : Déplacement résultant
A partir des données calculées, nous pouvons maintenant vérifier chaque critère de
dimensionnement demandé :
Le matériau utilisé est le S235JR son limite d’élasticité Re=235N/mm2, avec un
coefficient de sécurité S=2. (Annexe 22)
σVM ≥ = = 117,5MPa
Conception d’un bobinoir 77 Cherif Borhen
Projet de fin d’études 2013/2014
σVM=232MPa>117,5MPa
Le critère de Von Mises n’est pas vérifié.
La bobine ne résiste pas à la masse totale du fil enroulé, il faut agir sur la limite
d’élasticité du matériau c’est pour cela nous proposons de faire un traitement thermique pour
le matériau de bobine tel que la trempe- revenu pour améliorer ces caractéristiques
mécaniques notamment sa limite élastique. Si non il faut diminuer le poids du fil.
IV.2. Vérification au flambage
La bobine est maintenue entre deux contres pointes, on modélise les deux l’action de la
contre pointe motrice par une liaison pivot, et la liaison rotule pour l’action de la contre pointe
coulissante
Pour vérifier le flambement du bobinoir, on considère le cas d’une poutre de longueur L
(longueur du bobinoir) soumise à un effort de compression F comme il est représenté dans le
model suivant : En A, une articulation. En B, un appui simple.
Figure 55 : Modèle de poutre en compression sur deux appuis
Conception d’un bobinoir 78 Cherif Borhen
Projet de fin d’études 2013/2014
IV.2.1. Calcul au flambement
Equation d’équilibre
Paramètres de calcul
E IGZ + F Uy =0 E : Module d’Young
IGZ : Moment quadratique
Résolution d’équation de second degré U : La déformée
L : Longueur de la bobine
Uy=Acosx + B sinx avec ² = (1) D:Diamètre extérieure de la bobine
d : Diamètre inférieure de la bobine
Fcr : Charge critique d’Euler.
Conditions aux limites : Uy (0) =0 A = 0
F : Force Axiale
Uy(L) =0 B sin ωL=0 ω = avec K=1,2… (2) s : Coefficient de sécurité
(1) + (2) F= avec K= 1,2….
Pour K=1, F= Fcr = ; IGZ = (D²-d²) ; s=2
IGZ = (800²-170²) m4
Fcr = = 56392 N
F×s Fcr
La compression est usuelle, la poutre reste droite, elle
est en équilibre stable Donc, pas de risque de
flambage de la bobine
Conception d’un bobinoir 79 Cherif Borhen
Projet de fin d’études 2013/2014
Conclusion
Dans ce chapitre, on a vérifié la résistance de la bobine vis-à-vis du poids de fil et au
flambement. Dans ce qui suit on abordera la sécurité et la maintenance du bobinoir.
Conception d’un bobinoir 80 Cherif Borhen
Projet de fin d’études 2013/2014
Chapitre V : Maintenance et sécurité
Conception d’un bobinoir 81 Cherif Borhen
Projet de fin d’études 2013/2014
La machine peut affronter quelques problèmes tels que la coupure de fil d’acier en cours
de bobinage, un arrêt du moteur principal ou moteur de trancannage. C’est pour cela on va
choisir dans ce chapitre un dispositif de sécurité pour la machine et pour l’opérateur tout en
vérifiant la chaine de cote des composants pour faciliter leurs entretiens.
V.1. Sécurité de la machine et de l’opérateur
L’usage incorrect de la machine peut causer des accidents et des dommages à personnes,
pour réduire cette inconvenance il faut équiper la machine de protections adéquates et
respecter les normes de sécurité pour l’opérateur.
V.1.1. Sécurité de la machine
Quand la bobine est pleine, il faut arrêter le moteur dès que possible sans
provoquer la cassure de fil, c’est pour cela on va placer un frein à disque sur la
contre pointe motrice. Cette Arrêt est réalisé par frein à disque pneumatique.
L’emplacement du frein est entre l’accouplement et l’arbre moteur.
Le moteur choisi nous donne un couple constant qui vaut 5400 Nm.
Figure 56 : Détermination du diamètre nominale
Pour cela il faut un couple plus grand avec un diamètre minimal de l’accouplement choisi
sur la contre pointe motrice = Ø102 mm donc on a choisi la pince GMXS qui convient pour
toutes les applications de freinage et de maintien et d’arrêt d’urgence pour des facteurs de
Conception d’un bobinoir 82 Cherif Borhen
Projet de fin d’études 2013/2014
services moyen à sévères (Série de frein Twiflex très connue dans les applications de
déroulage et treuil).
Choix : frein disque GMXSH Rattrapage d’usure automatique-Freinage par ressort-
ouverture pneumatique. (Annexe 23)
Tableau 13 : Caractéristiques du frein choisi
Diamètre nominal = 915 mm
A=914 mm
B=762 mm
Dmin=102 mm
Couple de freinage=5500 Nm
V.1.2. Sécurité de l’opérateur
Il est indispensable de placer un carter de protection au niveau de la machine. Pour cela il
nous faut un micro-interrupteur qui indique la fermeture de carter pendant le fonctionnement,
en cas d’ouverture accidentelle du carter, la machine s’arrête automatiquement et le
fonctionnement peut être rétabli seulement en poussant le bouton de mise en marche at après
avoir bien fermé les protections.
Selon la norme NF EN ISO 12100-1, un protecteur est une barrière physique, conçu
comme élément de la machine, et qui assure une fonction de protection vis-à-vis d’un ou
plusieurs phénomènes dangeureux.Cette fonction ne peut être assuré que lorsque le protecteur
en position fermé.
Les protecteurs destinés à empêcher l’accès aux zones dangereuses doivent être conçu,
réalisés et disposés de manière à empêcher toutes les parties du corps à atteindre.
Conception d’un bobinoir 83 Cherif Borhen
Projet de fin d’études 2013/2014
Figure 57 : Dimensions de sécurité de la norme ISO 12100-1
o Hauteur ou se situe le phénomène dangereux1458 (hauteur de bobine) soit 1400 mm
o Hauteur de protecteur (hauteur de capot de protection) 1790mm soit 1800 mm
Figure 58 : Détermination de la distance du protecteur par rapport à la machine
D’après la figure 58 la distance par rapport le phénomène dangereux c=800 mm
Il faut placer le capot de protection à une distance horizontale de 800 mm par rapport à la
bobine
Conception d’un bobinoir 84 Cherif Borhen
Projet de fin d’études 2013/2014
V.2. Vérification chaine de cote
Lors de la conception du bobinoir, on a pensé à espacer les flancs du bobinoir afin
d’installer les composants déjà choisi pour faciliter leurs entretiens par l’agent de
maintenance.
On choisira des plaques en tôles épaisses pour contenir ces composants.
Au niveau de l’arbre moteur et le moteur principal (partie droite de la machine)
Les cotes des composants déjà choisis (moteur principal-frein-accouplement) données par
le constructeur sont disponibles à l’Annexe (7, 8 et 23)
Longueur des composants : suivant l’axe de rotation de la bobine
Largeur des composants :
Hauteur des composants :
Il nous faut une plaque pour les trois composants de dimension(x=764mm, y=1705mm),
situé à z = -355mm de l’axe principal de l’arbre moteur.
Au niveau de système de trancannage, on a choisi de placer le moteur LSMV à la
partie gauche de la machine pour éviter l’encombrement des composants.
Longueur du moteur : 212 mm
Largeur du moteur : 157 mm
On a déjà un espace largement suffisant pour placer le moteur, la poulie motrice.
Espace derrière la contre pointe coulissante (partie gauche) :
o Longueur 1155 mm largeur 588 mm hauteur du moteur 220 mm
Conception d’un bobinoir 85 Cherif Borhen
Projet de fin d’études 2013/2014
On a déjà choisi l’entraxe entre les deux poulies e=321mm, donc le moteur doit s’installer
au-dessous de la vis de transmission de
Finalement il nous faut une plaque de dimension (212mm, 157mm) situé au-dessous
de la vis de transmission de 331 mm, pour installer le moteur et la poulie motrice.
V.3. Maintenance du bobinoir
Un entretien régulier de la machine augmente sa durée e sa sécurité de fonctionnement
l’entretien doit être effectué par un technicien exercé
Entretien périodique :
Les opérations d’entretien sont indiquées dans le tableau 14.
Tableau 14 : Opérations d’entretien pour chaque pièce
Pièce à contrôler Fréquence contrôle Opération à faire
Engrenage Tous les six mois Contrôle général-lubrification
Courroies Tous les six mois Contrôle
Moteur, brosses Tous les six mois Contrôle
Partie de la machine Chaque 100h Contrôle/graissage
Filtre ventilateur moteur Tous les 30 jours remplacement
Poulies et partie en
Tous les 2 mois Contrôle usure
mouvement
Boulons Tous les 6 mois Contrôler et fixer
Equipement électrique Tous les 3 mois nettoyer
Maintenance :
Pour un fonctionnement correct et durable de la machine il faut exécuter quelques
opérations spécifiques pour le bobinoir.
Les opérations d’entretien mécanique, électrique, hydraulique doivent être exécutées par
personnel exercé ; toute opération doit être faite avec machine arrêté.
Conception d’un bobinoir 86 Cherif Borhen
Projet de fin d’études 2013/2014
Les temps el les moyens d’intervention doivent être considérés le minimum indispensable
pour une utilisation sure de la machine.
Voici quelques opérations pour le bobinoir [14]
- Serrage mécanique : vérifier le serrage des vis, écrous, boulons et des différents
éléments de fixage en particulier des parties en mouvement.
- Brosses moteurs : vérifier l’état d’usure des brosses des moteurs en courant
continu en suivant les instructions du constructeur et les données de la plaque.
Vérifier aussi l’état de l’usure des lamelles du commutateur. Ces contrôles
doivent être fais par personnel qualifiée (vérifier chaque 2000h)
- Coussinet : contrôler le fonctionnement correct des coussinets et relever bruits,
vibrations.
- Frein : vérifier l’état d’usure des éléments de freinage et frottement. Contrôler
disque frein (contrôler chaque 2000h).
- Filtres et ventilateur : pour maintenir en plein régime les filtres des ventilateurs et
des aspirateurs il faut remplacer l’élément filtrant selon les conditions de
l’environnement de travail.
- Courroies de transmission : vérifier la tension et l’état d’usure des courroies en
réglant les systèmes de tension.
- Contrôle et nettoyage : effectuer un contrôle de bon état de tous les parties de la
machine.il est préférable de faire un nettoyage systématique surtout des parties en
mouvement, comme par exemple guides, cylindre.
- Garnitures et joints : contrôler le bon état des garnitures et joints afin d’éviter
pertes d’air et de fluides.
- Pertes d’air : vérifier s’il y a des pertes d’air dans le circuit pneumatique en
particulier sur les points de jonction et dans les cylindres.
- Tuyaux : contrôler l’état des tuyaux hydrauliques et pneumatiques qui composent
l’installation.
- Contrepointes : avec l’augmentation des heures de travail les contrepointes
peuvent s’usure .Vérifier que cette usure ne compromette pas le bon
fonctionnement de la machine et l’efficacité du blocage. Contrôler chaque mois.
Conception d’un bobinoir 87 Cherif Borhen
Projet de fin d’études 2013/2014
Conclusion
Afin de garantir un bon fonctionnement du bobinoir en toute sécurité, on a développé
quelques dispositifs de sécurité et on a traité sa maintenance.
Conception d’un bobinoir 88 Cherif Borhen
Projet de fin d’études 2013/2014
Conclusion
Le présent projet m’a permis d’acquérir des nouvelles connaissances, de mettre en valeur
des acquisitions ainsi de savoir réfléchir et réagir face à des problèmes pratiques. On a tenu, à
travers ce projet à ce que la base de recherche des solutions soit la plus vaste possible.
Cependant, on a été guidé par le souci de respect du cahier des charges ainsi que les
contraintes technologiques du système à concevoir. On a également essayé d’optimiser le
travail en essayant d’utiliser le maximum des pièces standards pour minimiser le coût de
fabrication de la machine.
La problématique était de concevoir un bobinoir à axe horizontale qui sert à enrouler le fil
d’acier dur situant dans une nouvelle ligne de rebobinage dans le département Trèflerie.
L’objectif de projet est de concevoir et modéliser un bobinoir qui satisfait des exigences
précises tel que la géométrie du bobine, la vitesse, le poids de machine en cours de
fonctionnement.
J’ai commencé par une étude bibliographique afin de mettre le problème en situation et
de présenter les différents systèmes de rebobinage. Ensuite, j’ai présenté une analyse
fonctionnelle descriptive pour aboutir à un cahier des charges fonctionnelles. Puis j’ai fait le
choix et le dimensionnement de différents composants du mécanisme ainsi l’étude au
chargement de la bobine. Dans la dernière partie, j’ai étudié la sécurité et la maintenance du
bobinoir.
La machine proposée est modélisé en 3D, ses composants sont bien définis dans des
dessins de définition, la motorisation du système est réalisé après le choix des éléments de
machine qui sont validés et disponibles dans les annexes avec leur cotations.
Pour valider notre choix, nous avons réalisé des calculs RDM et de vérifications de
contraintes en passant par des simulations par éléments finis en utilisant le code de calcul
« Abaqus » et un calcul de chaîne de cotes pour vérifier sa mise en place.
La société « EL FOULADH » cherche à accomplir ce projet en faisant sa réalisation au
début de juillet.
Conception d’un bobinoir 89 Cherif Borhen
Projet de fin d’études 2013/2014
Références Bibliographiques
[1] : GAUVIN, RAYMOND, Systèmes hydrauliques, édition Polytechnique de
Montréal, 1981.
[2] théorème du moment cinétique et est l'équivalent du principe fondamental de
la dynamique (deuxième loi de Newton) pour la dynamique de rotation.
[3] SERMES motorisation : Motoréducteurs/Réducteurs <http://www.sermes.fr>
[4] : Cours Conception mécanique : Etude des liaisons entre les solides .Mr
Mohamed Ben Ali 2011/2012
[5] : Alain DAIDIE Manuel PAREDES André FERRAND Modélisation des
systèmes mécaniques, Version 2008/2009
[6] Cours Mécanique de l’endommagement et de rupture. Mr : Wajdi Rajhi
2013/2014
[7] A.Brand.Données technologiques sur la fatigue, Senlis, CETIM, 1999,4eme
édition, 384p.
[8] GILBERT DROUIN, Éléments de machines, édition Polytechnique de
Montréal, 1986.
[9] Catalogue : Courroies trapézoïdales. TEXROPE METHODE DE CALCUL
[10] Cours Transmissions Fluidiques. Mr .Ayed Mahfoud 2012/1013
[11] Cours Mécanique de Structures. Mme Taysir Rezgui.2013/2014
[12] Critère de Résistance
[13] Ligne de rebobinage Mod.Robomatic SS/1.Manuel d’utilisation Version
1995
Conception d’un bobinoir 90 Cherif Borhen
Projet de fin d’études 2013/2014
ANNEXES
Conception d’un bobinoir 91 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 1
Conception d’un bobinoir 92 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 2
Conception d’un bobinoir 93 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 3
Conception d’un bobinoir 94 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 4
Conception d’un bobinoir 95 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 5
Conception d’un bobinoir 96 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 6
Annexe 7
Conception d’un bobinoir 97 Cherif Borhen
Projet de fin d’études 2013/2014
Conception d’un bobinoir 98 Cherif Borhen
Projet de fin d’études 2013/2014
Conception d’un bobinoir 99 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 8
Conception d’un bobinoir 100 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 9
Conception d’un bobinoir 101 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 10
Conception d’un bobinoir 102 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 11
Conception d’un bobinoir 103 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 12
Conception d’un bobinoir 104 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 13
Conception d’un bobinoir 105 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 14
Conception d’un bobinoir 106 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 15
Conception d’un bobinoir 107 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 16
Conception d’un bobinoir 108 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 17
Conception d’un bobinoir 109 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 18
Conception d’un bobinoir 110 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 19
Conception d’un bobinoir 111 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 20
Annexe 21
Conception d’un bobinoir 112 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 22
Conception d’un bobinoir 113 Cherif Borhen
Projet de fin d’études 2013/2014
Annexe 23
Conception d’un bobinoir 114 Cherif Borhen
Projet de fin d’études 2013/2014
Résumé
Dans le cadre du projet de fin d’étude, j’étais appelé par la société « EL FOULADH » à faire
l’étude et la conception d’un bobinoir. Pour arriver à cette finalité, j’ai mené une étude qui
m’a permis en premier lieu de bien définir le besoin de l’entreprise à travers l’analyse
fonctionnelle descriptive afin de choisir les composants de la machine. Puis, je me suis
intéressé à réaliser le calcul et le dimensionnement des éléments en tenant compte de
différentes contraintes. Ensuite j’ai étudié le comportement du bobinoir face au chargement
Enfin, j’ai cité quelques dispositifs de sécurités pour la machine et sa maintenance.
Abstract
Within the framework of the graduation project, I was asked by the company «EL
FOULADH» to study and design a winder. To achieve this purpose, I conducted a study that
allowed me in the first place to clearly define the need of the company through the functional
analysis to select the components of the machine. Then I'm interested in doing the calculation
and dimensioning of the elements sizing taking into account various constraints. Then I
studied the behavior of the winder front loading. Finally, I mentioned some safety devices for
the machine and its maintenance.
Mots clés
Bobine-Contre pointe-Fatigue-Concentration des contraintes-Eléments finis
Conception d’un bobinoir 115 Cherif Borhen
Projet de fin d’études 2013/2014
Conception d’un bobinoir 116 Cherif Borhen
Vous aimerez peut-être aussi
- ABDELMOULA Amine PDFDocument137 pagesABDELMOULA Amine PDFchaima zrelliPas encore d'évaluation
- Pfe MecaniqueDocument5 pagesPfe MecaniqueAmira Warhéni100% (1)
- Pfe Uas Souhail New1Document69 pagesPfe Uas Souhail New1saif eddine msiliniPas encore d'évaluation
- Sujet Projets GM 2017-2018 v2 - 3Document16 pagesSujet Projets GM 2017-2018 v2 - 3EL MATADORPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Ptv-Roue À GorgeDocument5 pagesPtv-Roue À Gorgeadem bengharsaPas encore d'évaluation
- Catalogue Choix Vérins HydrauliquesDocument60 pagesCatalogue Choix Vérins HydrauliquesStephane Tchoriang100% (1)
- Rapport Modélisation Du Retour Élastique en Pliage Des Tôles en LairDocument92 pagesRapport Modélisation Du Retour Élastique en Pliage Des Tôles en LairriadhbacharPas encore d'évaluation
- Poly 2004Document192 pagesPoly 2004Skander TmarPas encore d'évaluation
- Cours Techniques D'usinage AvancéesDocument79 pagesCours Techniques D'usinage AvancéesFadwa ZRPas encore d'évaluation
- Département de Génie Mécanique MÉMOIRE.Document110 pagesDépartement de Génie Mécanique MÉMOIRE.btkmouradPas encore d'évaluation
- Pfe Banc de TP RDMDocument52 pagesPfe Banc de TP RDMNouh Hamnal100% (1)
- Rapoort Socio NouraneDocument21 pagesRapoort Socio Nouraneiheb trabelsi TGPas encore d'évaluation
- Compte Rendu:: Influence Des Paramètres de Coupe Sur L'état de SurfaceDocument10 pagesCompte Rendu:: Influence Des Paramètres de Coupe Sur L'état de SurfaceFerchichi HajerPas encore d'évaluation
- Tp4 Equilibrage Des Masses À Piston PDFDocument12 pagesTp4 Equilibrage Des Masses À Piston PDFMohamedBenChiekhPas encore d'évaluation
- Analyse de La Fabrication D'un - EL BACHARI Hoummad - 484Document50 pagesAnalyse de La Fabrication D'un - EL BACHARI Hoummad - 484essaid100% (1)
- CH 4-ConvertiDocument25 pagesCH 4-ConvertiAIT ELHAJ BRAHIMPas encore d'évaluation
- Memoire: Etude Et Conception D'Une Machine de SoudureDocument135 pagesMemoire: Etude Et Conception D'Une Machine de SoudureElajmi Rostom100% (1)
- Stage InitiationDocument28 pagesStage Initiationala dinne hajriPas encore d'évaluation
- AF Du Barbecue A Charbon de Bois: Analyse FonctionnelleDocument23 pagesAF Du Barbecue A Charbon de Bois: Analyse Fonctionnellengouo100% (2)
- Torseur LiaisonsDocument1 pageTorseur LiaisonsAmina Dinari100% (1)
- TARIERE ELECTRIQUE: Analyse FonctionnelleDocument34 pagesTARIERE ELECTRIQUE: Analyse FonctionnellengouoPas encore d'évaluation
- Analyse Par Éléments Finis Des Déférents Procèdes D'usinageDocument25 pagesAnalyse Par Éléments Finis Des Déférents Procèdes D'usinageMohammed LounisPas encore d'évaluation
- M GM - Co.me 2019 04Document67 pagesM GM - Co.me 2019 04Ameni Khaled100% (1)
- Rapport FinaleDocument27 pagesRapport FinaleYassine Aallalou100% (1)
- Prototypage RapideDocument29 pagesPrototypage Rapideamine chabchoubPas encore d'évaluation
- Projet AkhiatDocument14 pagesProjet AkhiatEl Mehdi MakaveliPas encore d'évaluation
- Rapport Mini ProjetDocument14 pagesRapport Mini ProjetYuba Mis n'Arrif0% (1)
- Rapport de PfeDocument49 pagesRapport de PfeHidaya SklPas encore d'évaluation
- M13Programmation Reglage Et Conduite Des MOCN Version 1Document212 pagesM13Programmation Reglage Et Conduite Des MOCN Version 1Soufiane TouilPas encore d'évaluation
- Rapport CNCDocument10 pagesRapport CNChajarisoPas encore d'évaluation
- TD02 Usure Outils CoupeDocument1 pageTD02 Usure Outils CoupeBahazPas encore d'évaluation
- Compte RenduDocument12 pagesCompte RenduMohamed BerzoukPas encore d'évaluation
- Prise Soudure Conception Rotor - MemoireDocument51 pagesPrise Soudure Conception Rotor - MemoireNoureddinePas encore d'évaluation
- Cours Cao IiDocument61 pagesCours Cao IiO ZPas encore d'évaluation
- Rapport de Projet Malaquin Deguillage LerouxDocument130 pagesRapport de Projet Malaquin Deguillage Lerouxquerby100% (1)
- TP MSPDocument11 pagesTP MSPWijdane El Moussaid100% (1)
- Engrenage HéliquoidaleDocument105 pagesEngrenage HéliquoidaleKhemili SayfPas encore d'évaluation
- 2 Guide Rapports de Stages Génie Industriel 2016 2017 Converti8795Document7 pages2 Guide Rapports de Stages Génie Industriel 2016 2017 Converti8795Reda ArifPas encore d'évaluation
- TP Les Dispersions en UsinageDocument5 pagesTP Les Dispersions en UsinageBilel Boulehmi0% (1)
- Présentation de Stage Technicien Chez Amec ExportDocument14 pagesPrésentation de Stage Technicien Chez Amec ExportMaher Garfa100% (1)
- Projet de Fin D Étude en Vue de L Obtention Du Diplôme Master en Génie Mécanique Option I.M.A.O. ThèmeDocument103 pagesProjet de Fin D Étude en Vue de L Obtention Du Diplôme Master en Génie Mécanique Option I.M.A.O. ThèmeBouraoui Ben Ayed100% (1)
- Presentation Projet Fin D'etudeDocument35 pagesPresentation Projet Fin D'etudefoufoua100% (2)
- Rapport Jet D'eau 1Document7 pagesRapport Jet D'eau 1Mohammed Amine LabbardiPas encore d'évaluation
- Rapport de Stage v.01-1Document40 pagesRapport de Stage v.01-1Ayoub JrPas encore d'évaluation
- OptimisationDocument4 pagesOptimisationredwane ouberri100% (1)
- Etude Conception Et Simulation Sous SOLIDWORKSDocument129 pagesEtude Conception Et Simulation Sous SOLIDWORKSHind SoukaPas encore d'évaluation
- Rapport PfeDocument72 pagesRapport PfeMr.ShadyPas encore d'évaluation
- Final PDFDocument109 pagesFinal PDFAbdessattar AbdouPas encore d'évaluation
- Memoire 171735082444 & 171735092115Document69 pagesMemoire 171735082444 & 171735092115Manal QuorsanePas encore d'évaluation
- Borne Réglable Dessin DéfDocument2 pagesBorne Réglable Dessin DéfZack Mahmoudi100% (1)
- COMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Document16 pagesCOMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Salma Rekik100% (1)
- Prog ProductiqueDocument159 pagesProg ProductiqueMakrem Cherif100% (1)
- Rapport de Stage: Etude Et Conception D'une Autocuiseur Avec Ses Outils D'emboutissageDocument48 pagesRapport de Stage: Etude Et Conception D'une Autocuiseur Avec Ses Outils D'emboutissagenoussayba elkhadarPas encore d'évaluation
- Rapport de StageDocument40 pagesRapport de StageYassine AouiniPas encore d'évaluation
- MécaniqueDocument55 pagesMécaniqueGhassen JemaaPas encore d'évaluation
- Conception Train D'atterrissageDocument49 pagesConception Train D'atterrissageKaoutar BouqdirPas encore d'évaluation
- ASMA Stage de PerfectionnementDocument38 pagesASMA Stage de PerfectionnementBã ŸøütáPas encore d'évaluation
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Opérations Unitaires: Tri Et Traitement Des Liquides Et Des Solides Free SampleDocument125 pagesOpérations Unitaires: Tri Et Traitement Des Liquides Et Des Solides Free SampleManoaki50% (2)
- AssemblageDocument1 pageAssemblageFajjeri HadilPas encore d'évaluation
- RapportDocument26 pagesRapportFajjeri HadilPas encore d'évaluation
- Turki Houssem EddineDocument85 pagesTurki Houssem EddineFajjeri HadilPas encore d'évaluation
- Lisez MoiDocument4 pagesLisez MoiFajjeri HadilPas encore d'évaluation
- Gafsaoui NajlaDocument77 pagesGafsaoui NajlaFajjeri HadilPas encore d'évaluation
- Charfeddine SarraDocument102 pagesCharfeddine SarraFajjeri HadilPas encore d'évaluation
- Lisez MoiDocument4 pagesLisez MoiFajjeri HadilPas encore d'évaluation
- Chebbi FakherDocument120 pagesChebbi FakherFajjeri HadilPas encore d'évaluation
- Zaguia TarekDocument72 pagesZaguia TarekFajjeri HadilPas encore d'évaluation
- Charfeddine SarraDocument102 pagesCharfeddine SarraFajjeri HadilPas encore d'évaluation
- Cours CAO Chapitre12Document45 pagesCours CAO Chapitre12yasmine ben ahmedPas encore d'évaluation
- Charni FarahDocument160 pagesCharni FarahFajjeri HadilPas encore d'évaluation
- Fteti AliDocument125 pagesFteti AliFajjeri HadilPas encore d'évaluation
- Frad Mohamed AliDocument72 pagesFrad Mohamed AliFajjeri HadilPas encore d'évaluation
- 2017clfac092 GelyDocument117 pages2017clfac092 GelyFajjeri HadilPas encore d'évaluation
- Chrabekh FatmaDocument68 pagesChrabekh FatmaFajjeri HadilPas encore d'évaluation
- FP1:Permettre L'utilisateur FT1: Tamisier La Présure S1: Tamis 0,4 MMDocument3 pagesFP1:Permettre L'utilisateur FT1: Tamisier La Présure S1: Tamis 0,4 MMFajjeri HadilPas encore d'évaluation
- Rapport FinalDocument153 pagesRapport FinalFajjeri HadilPas encore d'évaluation
- Exposé Du ProjetDocument41 pagesExposé Du ProjetFajjeri HadilPas encore d'évaluation
- 01-Analyse Fonctionnelle - EX-Rep PDFDocument12 pages01-Analyse Fonctionnelle - EX-Rep PDFHanane TounsiPas encore d'évaluation
- Devoir 04Document1 pageDevoir 04Fajjeri HadilPas encore d'évaluation
- Criblage - Critères de Choix Et Calcul D'un Crible - Calcul D'un Crible - Techniques de L'ingénieurDocument2 pagesCriblage - Critères de Choix Et Calcul D'un Crible - Calcul D'un Crible - Techniques de L'ingénieurFajjeri HadilPas encore d'évaluation
- ZaranDocument119 pagesZarancarrialdiPas encore d'évaluation
- Mise en Plan 1Document1 pageMise en Plan 1Fajjeri HadilPas encore d'évaluation
- 5249 04 Exemple Dexploitation PedagogiqueDocument4 pages5249 04 Exemple Dexploitation PedagogiqueFajjeri HadilPas encore d'évaluation
- Chevre D Atelier 1983Document7 pagesChevre D Atelier 1983Fajjeri HadilPas encore d'évaluation
- 5249 03 FlyerDocument2 pages5249 03 FlyerFajjeri HadilPas encore d'évaluation
- AssemblageDocument1 pageAssemblageFajjeri HadilPas encore d'évaluation
- Techno Mare1.Document46 pagesTechno Mare1.Jean jules etoukePas encore d'évaluation
- BPU - DEVIS - CM - BirtoutaDocument6 pagesBPU - DEVIS - CM - BirtoutamezouedPas encore d'évaluation
- Catalogue - Equipement-De-Pipeline PDFDocument65 pagesCatalogue - Equipement-De-Pipeline PDFsofianzo0% (1)
- Horloge - Mcppi CallertableDocument11 pagesHorloge - Mcppi Callertablezakaria100% (1)
- Catalogue 58Document116 pagesCatalogue 58Noureddine Ben SalemPas encore d'évaluation
- Action Des Solutions Acides Et Basiques Sur Les MatériauxDocument2 pagesAction Des Solutions Acides Et Basiques Sur Les MatériauxAgnaou MohamedPas encore d'évaluation
- Examen Coupe IFM Janvier 2021 VFDocument6 pagesExamen Coupe IFM Janvier 2021 VFعامر الشعيلي ولد شعبانPas encore d'évaluation
- Conseils Aux Utilisateurs de La Galvanisation À ChaudDocument12 pagesConseils Aux Utilisateurs de La Galvanisation À ChauddaemsalPas encore d'évaluation
- CV MontoirDocument1 pageCV Montoirachbari100% (1)
- Chapitre 5 Réactions D'oxydoréductionDocument4 pagesChapitre 5 Réactions D'oxydoréductionjean06Pas encore d'évaluation
- Corrosion Sous ContrainteDocument2 pagesCorrosion Sous ContrainteTheophile IZEREPas encore d'évaluation
- Catalogue Schneider Electric - Solution Inox Pour Les Milieux Indoor Et Outdoor - 2010Document76 pagesCatalogue Schneider Electric - Solution Inox Pour Les Milieux Indoor Et Outdoor - 2010ZorbanfrPas encore d'évaluation
- COMPOSANTDocument36 pagesCOMPOSANTBossaid MohamedPas encore d'évaluation
- TP Evalué Dissolution Et DilutionDocument2 pagesTP Evalué Dissolution Et DilutionChaymaaaPas encore d'évaluation
- Résistivité Des MétauxDocument7 pagesRésistivité Des MétauxAnes ArcPas encore d'évaluation
- Les Metaux Non FerreuxDocument22 pagesLes Metaux Non Ferreuxhalima halimaPas encore d'évaluation
- Rapport de Stage PfeDocument47 pagesRapport de Stage PfeLamiae Feraâ100% (4)
- Souaiaia HakimDocument95 pagesSouaiaia Hakimabd elheq zeguerrouPas encore d'évaluation
- Baking Colour Code Pre Heat/Post Heat PWHT Weld Visual NDT: Nominal CompositionDocument1 pageBaking Colour Code Pre Heat/Post Heat PWHT Weld Visual NDT: Nominal Compositiondada shaikPas encore d'évaluation
- Chemistry Paper 1 HLDocument17 pagesChemistry Paper 1 HLMichelle OsaserePas encore d'évaluation
- Memoire Master Rahim Adnan 2020 1Document82 pagesMemoire Master Rahim Adnan 2020 1Amin LarouiPas encore d'évaluation
- Andavakoera Mines orDocument34 pagesAndavakoera Mines orJulie SPas encore d'évaluation
- Jauge D'épaisseur Par Ultrasons Elcometer 204Document2 pagesJauge D'épaisseur Par Ultrasons Elcometer 204Hassen ChaariPas encore d'évaluation
- Iso 1461Document22 pagesIso 1461Narimane BentyPas encore d'évaluation
- Cofran Plurafluid B FRDocument2 pagesCofran Plurafluid B FRMoustapha AhmadouPas encore d'évaluation
- Rapport de Stage de Perfectionnement f1Document25 pagesRapport de Stage de Perfectionnement f1Nesrine RzigPas encore d'évaluation
- Guide Esab SoudureDocument130 pagesGuide Esab SoudureCharfi_houssem100% (1)
- Malaxeur de BetonDocument24 pagesMalaxeur de BetonFaicel Mejri100% (2)
- Cours Arc Welding 2023 2024Document100 pagesCours Arc Welding 2023 2024nabilboussoualimPas encore d'évaluation
- Modelisation Et Simulations Des Operations D'extraction Par Solvant Et D'electrolyse (Sx-Ew) Du CDocument221 pagesModelisation Et Simulations Des Operations D'extraction Par Solvant Et D'electrolyse (Sx-Ew) Du CGLOIRE NTONDOPas encore d'évaluation